
Abstract
In this article, an energy-efficient gait planning algorithm that utilizes both 3D body motion and an allowable zero moment point region (AZR) is presented for biped robots based on a five-mass inverted pendulum model. The product of the load torque and angular velocity of all joint motors is used as an energy index function (EIF) to evaluate the energy consumption during walking. The algorithm takes the coefficients of the finite-order Fourier series to represent the motion space of the robot body centroid, and the motion space is gridded by discretizing these coefficients. Based on the geometric structure of the leg joints, an inverse kinematics method for calculating grid intersection points is designed. Of the points that satisfy the AZR constraints, the point with the lowest EIF value in each network line is selected as the seed. In the neighborhood of the seed, the point with the minimum EIF value in the motion space is successively approximated by the gradient descent method, and the corresponding joint angle sequence is stored in the database. Given a distance to be traveled, our algorithm plans a complete walking trajectory, including two starting steps, multiple cyclic steps, and two stopping steps, while minimizing the energy consumption. According to the preset AZR, the joint angle sequences of the robot are read from the database, and these sequences are adjusted for each step according to the zero-moment-point feedback during walking. To determine the effectiveness of the proposed algorithm, both dynamic simulation and walking experiment in the real environment were carried out. The experimental results show that compared with algorithms based on the fixed body height or vertical body motion, our gait algorithm has a significant energy-saving effect.
Keywords
Introduction
Bipedal robots have human-like structures and appearances, which can adapt to the human environment, and are ideal robots for replacing human work. In the past 50 years, research institutions and scholars at home and abroad have carried out much research on biped robots and have achieved remarkable progress. 1,2 For example, humanoid robot HRP-4 can drive vehicles in the middle of the road, 3 and ATLAS can traverse obstacles and climb stairs. 4
Bipedal walking is the most important and challenging problem in research on biped robot motion. According to different research ideas, the proposed biped walking methods can be divided into three approaches. One is to utilize high-speed optical motion capture systems to obtain data on human motion according to external characteristics of human walking and apply these features to the generation of robot motion modes. 5,6 The other approach is to use a central pattern generator to simulate the neural network control of human walking to generate rhythmic signals, thereby solving the problem of robot gait generation. 7 -9 The third approach is to simplify the biped robot into a linear inverted pendulum model consisting of a point mass and a massless telescopic leg 10 -13 or a cart-table model consisting of a table without mass and a cart driving on the table with all the mass concentrated in it. 14
At present, the structural complexity of existing biped robots is much less than that of humans, which indicate that gait methods based on human characteristics and central pattern generators have limitations. Researchers prefer to adopt the method that involves simplifying the biped robot model. The accuracy of the simplified model determines the accuracy of the control effect. Based on the single-mass inverted pendulum model and considering the weight of the legs, Shimmyo et al. proposed biped walking pattern generation using preview control based on a three-mass model. 15 Luo and Chen presented a three-mass angular momentum model 16 and a five-mass momentum model 17 using model predictive control to obtain better motion control accuracy. However, as model complexity increases, model nonlinearity increases and gait control becomes more difficult. Considering that the leg mass of the motor-driven biped robot is mainly distributed according to the position of the motor, the five-mass model, which includes five mass points representing the body, legs, and feet, is regarded as the best tradeoff.
To simplify the complexity of the algorithm used in gait control for biped robots, constraint conditions for the robot body are introduced, which cause unnatural walking motions, consume large amounts of energy, and limit the operation time of battery-powered robots. 18 Hong et al. allowed vertical body motion and alleviated the problem of bending knee joints. 19 Shin and Kim further removed constraints on the motion trajectory, which improved walking speed and reduced actuator energy consumption. 20 If the robot body is allowed to move with more degrees of freedom, a better control effect can be expected. In this article, the bipedal body center of mass is allowed to move in three dimensions.
Fewer constraint conditions result in an increase in parameter space in gait control. It would be optimal if a solution could be found by artificial intelligence. Dau et al. applied a genetic algorithm to optimize the seven key parameters defining the hip and foot trajectories. 21 Elhosseinia et al. designed a whale optimization algorithm with a random parameter “a” and weight parameter “C” to find the optimal setting for the hip parameters. 22 Wu and Li used fuzzy logic to control the dynamic gait pattern generator of a humanoid robot, resulting in better responses to external force disturbances. 23 Wright and Jordanov summarized the commonly used intelligent approaches to robot locomotion control. 24 Generally, the range and accuracy of parameters need to be included in the optimization algorithm. This article presents a hierarchical optimization algorithm, that is, the grid computing method, to find the best region in a large range of parameter value spaces. Then, the gradient approximation method is used to find the optimal gait parameters for the robot with high accuracy.
The rest of this article is organized as follows. In the second section, we describe the simplified biped robot model and formulate the problem of gait planning. The third section focuses on the gait planning algorithm from two aspects: optimal minimization of energy consumption and real-time motion planning. According to the algorithm in this article and various control methods proposed in the related literature, the fourth section presents the simulation and experimental results for the performance analysis of the proposed algorithm. In the fifth section, the algorithm is summarized, and possible follow-up work is presented.
Problem formulation
System structure
The humanoid robot used in this article has two arms and two legs, thereby imitating the walking motion of the human body. Each leg has five degrees of freedom (DoFs), including two DoFs at the hip, one DoF at the knee, and two DoFs at the ankle, and the joint vector can be expressed as

(a, b) Link structure of the experimental robot.
Basic parameters of the experimental robot.

In general, some constraints are needed to simplify the scope of an analysis of robot walking. The proposed walking gait assumes the following conditions: The upper body remains upright at all times. The pitch rotation of the human trunk is small, within 3°,
25
and energy consumption increases as the trunk is leaned forward.
26
Therefore, most relevant research studies
4,5,10
-23
have shown that this assumption is acceptable. Both feet are always parallel to the ground. Most common humanoid robots have no toes and cannot utilize the toes to improve driving the lifting and planting of the feet.
27,28
One step of duration T contains a double support phase (DSP)
Zero moment point equations
Among various dynamic stability standards for biped robots, the most widely used technique is the zero moment point (ZMP).
29
The ZMP is the point on the ground where the horizontal component of the total moment generated by gravity and inertia forces is zero. The five mass points of the biped robot are the body b, the left leg

Five-mass biped robot model: (a) Sagittal plane and (b) frontal plane.
At ZMP position

where


Here,

Allowable zero moment point region
Modeling errors inevitably exist when modeling biped robots. Hong et al. set the ZMP trajectory near the centerline of the support foot to achieve the greatest stability during walking,
11
but this is not an energy-efficient method. In the region of the support foot, some edge regions are drawn out to compensate for the modeling errors,
20
and the ZMP trajectory is located in the allowable ZMP region (AZR) of the middle subregion of the support foot. This is a better method for balancing modeling errors and walking efficiency. For a biped robot with foot length

AZR of biped robots. AZR: allowable zero moment point region.
Energy consumption index function
The energy consumption E of a biped robot can be divided into two parts: the energy consumption Em for robot motion and the energy consumption Ea for nonmotion. Em is the main component of E, which is the integral of the instantaneous power consumption vector

In general, Em can be significantly reduced through gait trajectory optimization,
30
which is suitable for evaluating the performance of the gait algorithm. For biped robots with many motors, it is difficult to accurately measure pm(t). pm(t) is equal to the sum of the output power consumption p2(t) and subsidiary electrical loss ploss(t); p2(t), its main component, can be calculated by multiplying the motor output torque τ2(t) and angular velocity

where
It is assumed that the sampling period ts of the control system is small enough between the two sampling points with

Problem definition
Based on the previous analysis, our energy-efficient gait planning problem can be formulated as follows: Given the step length and AZR of a biped robot, find the optimal gait parameters, that is, the parameters that minimize E, while allowing 3D body motion and satisfying the constraints in “System structure” section. For a goal distance d of bipedal walking, control the value of
Gait planning algorithm
Overview
In the gait planning optimization (GPO) algorithm, given the step length set S and the AZR set H for bipedal walking, 18 parameters are represented by the body trajectory
Given the required walking distance d and the value of η for the AZR, the GSYN algorithm plans the step sequence S* to achieve the minimum E. Each step length
Gait planning optimization algorithm
The GPO algorithm is used to generate a low-energy joint angle sequence
Gridding method
Our proposed gridding method is a process of discretizing multidimensional parameters by appropriate intervals, constructing parameter space grids, and then calculating the value of the function for each gridded line intersection point. If the walking step length is s, the robot body b performs a 3D cyclic motion satisfying the constraint (a) in “System structure” section, and the position
where N is the gait period,
Inverse kinematics calculation
To utilize the parallel acceleration of the GPU, the inverse kinematics algorithm is designed for the geometric structure of the robot leg. Without loss of generality, suppose that the robot starts walking during the DSP with the left leg in front and the right leg in the rear; then, the right leg swings forward. The starting position of the RF

where ws is the step width, hs is the step height, N is the gait cycle,
Given

Geometric relations between
Combining
Inverse kinematics algorithm


Generally, Us has a large number of elements. Considering the locomotion characteristics of During walking, the given
Seed extraction
For Physical constraint: for ZMP condition: the ZMP trajectory corresponding to
The wider AZR consumes less energy but yields less walking stability.
20
In gait control of the biped robot, multiple There is a linear relationship between the number of seeds The energy consumption of the same column grid is the lowest. Namely,
Gradient optimization
Obviously, the seed
For
Gradient optimization algorithm


Given
Gait synthesis algorithm
For a given walking distance d, there is a sequence
If the robot’s walking starts and ends with two feet standing side by side, the AZR is required to be

where
Obviously,
As shown in Figure 5, when the robot moves initially, the AZR should use a smaller

Overall gait planning algorithm.
In the AZR controller, the time Ts of each step is taken as the control period, that is, Ts = N ts, which includes the underactuated SSP and the overactuated DSP, which are applicable to different algorithms.
34
As shown in equation (9), N1 < n < N2 is the SSP, and both 1 ≤ n ≤ N1 and N2 < n ≤ N are the DSP. We let the AZR position during the i’th step satisfy robot walking stability as

where
The incremental PI regulator with transfer function

where

where
Experimental evaluation
According to the structure of the biped robot described in “System structure” section, a 3D simulation model is constructed in Webots to evaluate our proposed algorithm. In the GPO algorithm, we take
When
Analysis of


Convergence curve for
To compare the performance of different algorithms, the fixed hip height (FHH) is taken as the FHH algorithm,
16
the vertical variation in the hip height (VHH) according to the cosine waveform is taken as the VHH algorithm,
20
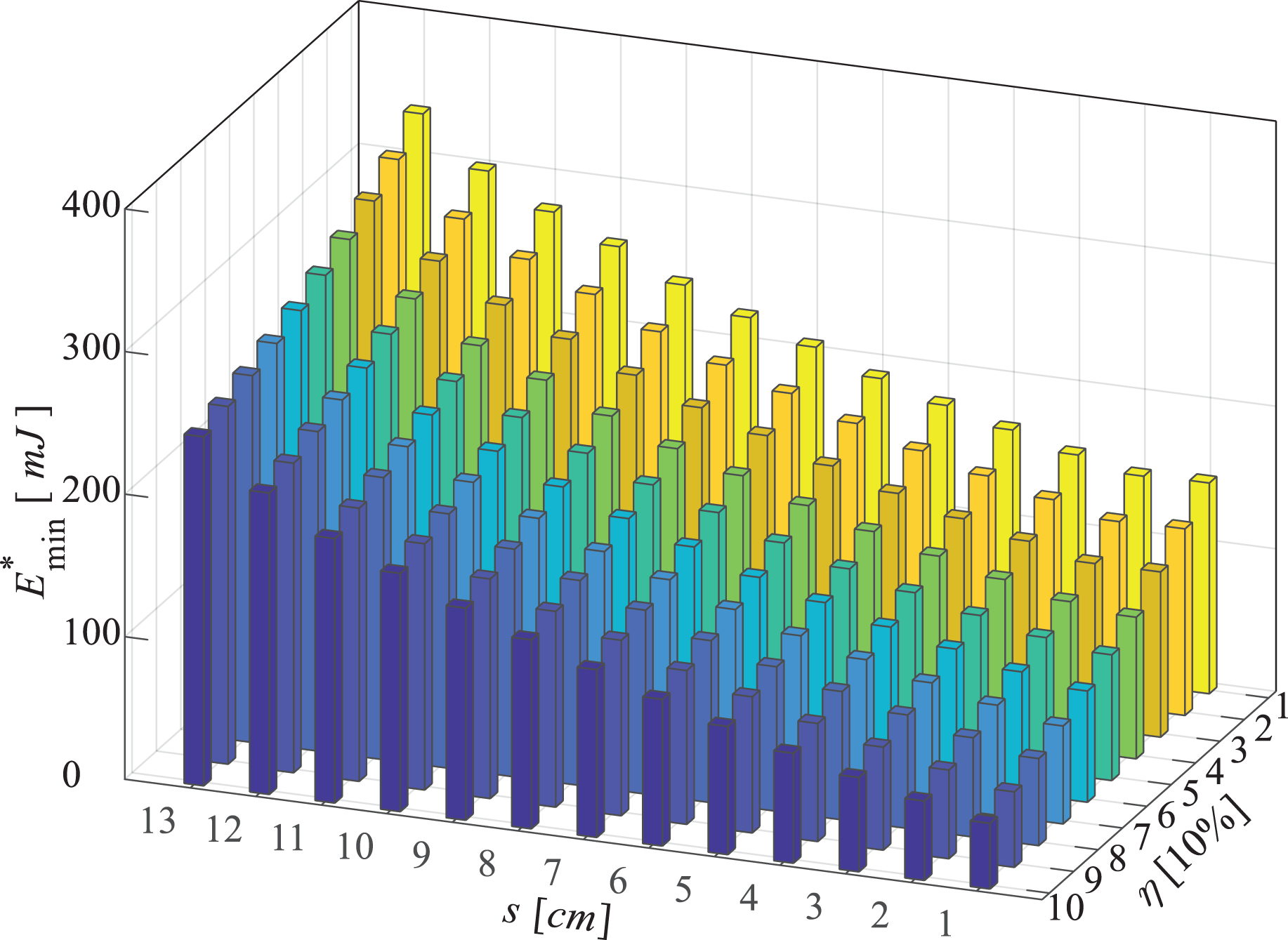
and the other conditions are the same as the algorithm in this article. After optimization,

Comparison of the
According to the GPO algorithm,
In the GSYN algorithm, if

If we let η = 0.8 and set the starting and stopping positions of walking to be two feet standing side by side, the swing length of the RF is Lrf = {3,17,20,20,17,3}, and the swing length of the LF is Llf = {10,20,20,20,20,10}. The two 3-cm elements in Lrf correspond to the starting step and stopping step, respectively, where
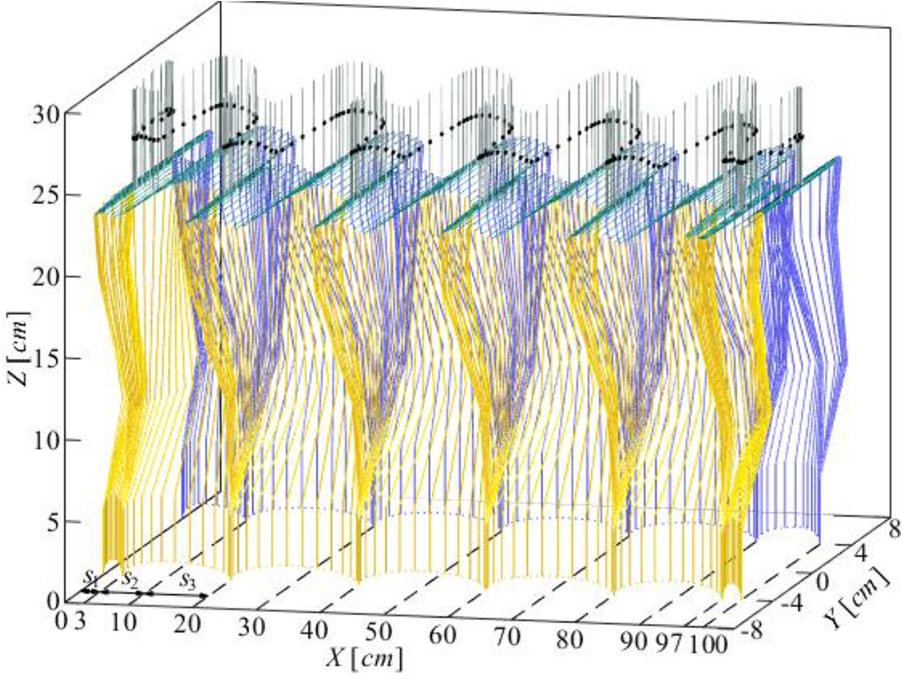
Dynamic simulation of robot walking.
According to the above simulation data, the actual robot walking experiment is shown in Figure 11.

Video frames of robot walking.
In the experiment, we set
GSYN data for robot walking,

GSYN: gait synthesis.
Conclusion
In this article, we have proposed a gait planning algorithm for biped robots that improve the energy efficiency of robot walking. The algorithm has universal applicability for different forms of biped robots. The following conclusions can be drawn from the theoretical analysis and experimental results:
The motor-driven robot has a dispersed mass, and the established five-mass robot model describes the physical characteristics of the robot better than other models. To balance the great computational complexity caused by the multimass model, we designed an energy consumption function with load torque as the main parameter; it could calculate the energy consumption index of the biped robot quickly during the simulation.
In the process of gridding the parameter space with the GPO algorithm, it is required that no grid has multiple peaks. If the appropriate mesh gap is selected, this method is suitable for optimizing most systems. During gradient approximation with the GPO algorithm, the step size of the successive approximations is determined according to the accuracy requirements. When the mesh size is large, the mesh can be meshed again to accelerate the approximation process. GPO requires many calculations during the optimization process. Using a GPU to accelerate the calculation can help determine the optimal value quickly. With the advancement of computer science, compared with many random optimization algorithms, our algorithm will show increasingly superior performance.
Given the walking distance of the robot, the GSYN algorithm plans the whole motion process, including the starting step, the intermediate steps, and the stopping step, while minimizing the energy consumption. In the process of robot walking, the algorithm adjusts the gait parameters according to the feedback ZMP data, and the AZR is set to overcome perturbations due to modeling and environmental errors. The algorithm can optimize the tradeoff between low energy consumption and high robustness and solve the problem of walking in biped robots with highly nonlinear characteristics.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.