
Abstract
The recent advancements in smart textiles have led to a surge in the use of textile-based sensors to detect various signals, including touch, pressure, body temperature, humidity, and so on. Due to their flexibility, bendability, and lightweight design, all of which make them perfect for a variety of flexible sensing systems. Herein, a capacitive touch sensor consisting of all textile components has been architected through computerized machine knitting technology. The prototype has been realized with the double knit intarsia knitting technique, which enables seamless integration of touch sensing textiles onto non-conductive base fabric during single knitting operations. This simple and easily embedded touch interface enables users to experience soft and ultraflexible electronic textiles with high responsive (response time ~80 ms) sensing capabilities. High reproducibility and repeatability were observed with the manufactured capacitive touch sensor, with negligible change in capacitance within 500 touched-untouched cycles. The sensor also demonstrates outstanding flexibility against various mechanical deformations, that is, twisting, grasping, folding, and pinching. As a proof of concept, a machine knitted touch keyboard, numpad, wristband, and soft switch have been demonstrated as capacitive touch sensing user interfaces for human-machine interaction.
Keywords
Introduction
The ubiquity of textiles for conformal coverings next to the human skin over the millennia makes it a promising platform for embedding wearable sensors,1–4 energy harvesting devices,5–7 energy storage devices,8–10 and antennae11–13 into it. Combining wearable sensors with conventional garments has become very popular due to its ability to capture on-body signals such as touch stimuli,14,15 body temperature,16,17 heart rate,18,19 pulse rate,20–22 and respiration rate.23,24 Generally, there are three types of electronic textile-based sensors, that is, piezoresistive,25–27 capacitive,28–30 and inductive.31,32 Among these, capacitive touch sensors have been a major developing area in the context of smart e-textiles. Usually, touch sensors are designed to transduce touch stimuli into a measurable electrical signal. Variations in capacitance can be detected by touch sensors.
The development of smart sensors involves conventional rigid electronics as well as flexible film-based polymers. These sensors are fabricated by various techniques, including photolithography, 33 surface etching, 34 nanofibrous aerogels, 35 etc., which are very complex and expensive. Although these sensors show good palpability and sensing capability, they perform poorly in terms of wearability and comfort. However, problems regarding electronic waste and sustainability in sensor manufacturing are still an issue.
General requirements for developing smart e-textiles now include reduced wastage of functional components, integration of electronic parts at localized positions, and an easy and scalable fabrication process. To overcome these challenges, textile manufacturing can be a better choice. Textile-based sensors can be produced via knitting,36–39 weaving,40–44 embroidery,45–47 and stitching 48 and they may require other post-processing techniques like coating, 49 screen printing 50 etc. From the beginning to the date of the e-textile research, sewing,51,52 embroidery, 45 and snap buttons 53 to attach conductive materials into garments have been considered as popular sensor embellishment techniques, but the resultant sensing interfaces suppress comfortability and bendability. Besides, machine weaving inhibits the ability to embed conductive yarns at any desired location, resulting in an increase of electronic waste.
However, machine knitting offers superior benefits over these popular techniques. Computerized machine knitting offers new possibilities for the sustainable manufacturing of flexible, stretchable, and easily tunable textile sensors. Among various knitting processes, the intarsia technique in knitting provides the flexibility of knit-at-will, that is, placing the conductive yarns in any desired position. This facilitates the reduction of waste of electronic components fulfilling the requirement of sustainable manufacturing of electronic textiles. This technique also produces fabrics that are easily scalable, soft, lightweight, flexible, comfortable, and cost-effective. They have good mechanical strength to withstand repetitive wear without compromising their sensitivity over a long period of time.
In this era of ubiquitous computing and human-machine interaction, textile-based touch sensors can play a vital role. Its application prototypes have been demonstrated in previous studies.40,41,46,54 Usually, capacitive touch sensors are of two types, that is, single-electrode-based self-capacitive touch sensors55,56 and double-electrode-based mutual capacitive touch sensors.48,57 A considerable amount of research has been explored on the fabrication of textile-based capacitive touch sensors. Abdullah al Rumon and Shahariar 48 developed a mutual capacitive touch sensor using off-the-shelf conductive thread and lockstitch sewing techniques. Sewing techniques are often lengthy, complex, and not easily scalable, which requires manual post-processing for sensor integration. In another work, a capacitive touch sensor was developed using the weaving technique, which is a three-layer woven fabric. 40 Here, sensing yarns are floated on the front and back sides of the fabric, which may be prone to snagging and induce discomfort for the wearer. Wu et al. 58 developed a capacitive sensor to detect human motion that uses woven nylon fabric as an electrode and ecoflex as a dielectric layer. Ghosh et al. 49 developed a reduced graphene oxide (rGO)-coated merino wool/nylon capacitive touch sensor to turn “on” and “off” a light bulb. The proposed method shows the change in capacitance from ~0.25 pF to ~0.55 pF when the sensor is touched. However, these proposed methods are hardly scalable and susceptible to stiffness, which hampers the flexibility of these sensors.
Here, we report machine knitted single electrode based capacitive touch sensors that incorporate commercial conductive yarn to achieve cost-effectiveness, allowing seamless integration into other non-conductive textile materials. The fabrication process involves embedding capacitive touch sensors directly into the fabric using the double knit intarsia technique through a computerized flatbed knitting machine. We prefer machine knitting over other fabric manufacturing techniques due to its unique features. With recent advances in state-of-the-art computerized design and fabrication technology, digital knitting machines offer knit-at-will fabrication opportunities through which we can architect soft, flexible touch sensing interfaces that are breathable and pleasant to touch. This feature allows us to construct any knitted textile with the accurate placement of any sensor anywhere in the clothing by precise control of the fabric’s geometrical parameters. By utilizing this advanced machine knitting technique, capacitive touch sensors can be manufactured with assured reproducibility without hampering their performance. Electromechanical characterization of the developed touch sensors demonstrates good mechanical stability under repeated deformation, good cyclic performance, ultra-flexibility, and high response and recovery times. We successfully tested our sensor’s capabilities by using it as a flexible keyboard, numpad, wristband, and soft switch for a servo motor, thereby ensuring its potential use in the field of human-machine interaction.
Materials and methods
Materials
To fabricate the self-capacitive touch sensor using the machine knitting technique, conductive and non-conductive yarns are required. The non-conductive acrylic base yarn (200 dtex × 2) was purchased from a local spinning industry. Polyester/stainless steel (60/40) conductive yarn (400 dtex × 3) with a linear resistance of 6 Ω/cm was purchased from Bekaert, Belgium. The physical properties of both conductive and non-conductive yarns are given in Table 1. The sensor was designed in the KnitPaint module of SDS One Apex 3 software and fabricated using an SSR112_14G computerized flat knitting machine (Shima Seiki, Japan).
Physical properties of the yarns used for knitting the sensors.

Knitting capacitive sensors
The sensor consists of three parts: hem, non-conductive base part, and conductive sensor part (Figure 1(a)). Carrier 5 was used for hem knitting, which is a basic 1 × 1 rib structure, and the base fabric is an all-needle double jersey rib structure knitted with carrier 2 as shown in Figure 1(b). Two conductive yarns were employed to knit the sensors utilized by carriers 3 and 4. An advanced knitting technique, that is, Intarsia, was used to integrate off-the-shelf commercial conductive yarn into non-conductive base fabric. In this technique, a single course was knitted, either with two carriers (carrier 2 and carrier 4) or with three carriers, one for the non-conductive base yarn (carrier 2) and two for conductive functional yarns (carriers 3 and 4), as depicted in Figure 1(b) and (c), respectively.

Simulated view and needle notation diagram of the developed sensor designed in Shima Seiki Apex 3 software. (a) Simulated view of the sensor with hem, base fabric, and conductive part, (b) looping diagram of hem, base fabric, and conductive part, (c) side-by-side conductive part integration onto base fabric using the intarsia technique.
To fabricate sensors with different sizes, shapes, and forms, such as alphabets, numbers, and rectangles, carrier interference with needles was a common issue while producing this sensor. So, precise carrier positioning, needle selection, and carrier traversing were several challenges while knitting the sensor with intarsia, which were adjusted by giving accurate instructions while designing the sensor in the KnitPaint module of Apex 3 software as shown in Figure 2(a). Carrier-to-carrier distance (Supporting Information, Figure S1) was set in the knitting machine to an optimum value to avoid disruptions during the knitting. As in intarsia, each of the sensors was knitted separately, and the yarn was not carried across the back of the work, which assures a flexible structure with no yarn floating as shown in Figure 2(c). Here, the self-capacitive touch sensing interface was devised on a Shima Seiki SSR 112_14G digital flatbed knitting machine, as shown in Figure 2(b). The run-in tension of the conductive yarn was maintained at 11 cN during the knitting operation, and the knitting speed was 0.70 m/s. This knitting machine is equipped with nine yarn carriers, of which four were employed to manufacture the desired sample. Two carriers were used to exclusively feed the conductive yarn, whereas the other two were responsible for base fabric and waste knitting. The knitting was performed in both the front and back beds, as the sensor and base structures were of double knit.

Schematic of capacitive touch sensor fabrication and characterization: (a) knitting file processing, (b) knitting of the sensor, (c) fabricated sample, and (d) sensor characterization.
The fabricated sensor exhibited a course density and wale density of 20 courses per inch and 15 wales per inch, respectively. Keeping constant run-in tension of the conductive yarn during knitting to maintain uniform stitch length was an important issue. In order to achieve this, the yarn tension was set accurately, and a DSCS (Digital Stitch Control System) was used, which is located on the side of the flatbed knitting machine. To eliminate the possibility of fabric, pile up in between the two needle beds, an optimum takedown value (Supporting Information, Figure S3) was set.
Figure 3 illustrates the overall knitting programing sequence of the capacitive touch sensor. Figure 3(a) shows the color code instructions for developing the sensor in the KnitPaint module. Here, color code 2 (green) refers to non-conductive base yarn and color code 3 (yellow) denotes conductive yarns. Figure 3(b) and (c) shows the needle bed simulation view and the simulated sample in the software, respectively, and Figure 3(d) shows the actual developed sample.

Knitting programing and simulation: (a) color code instruction for the KnitPaint module, (b) virtual knitting simulation, (c) simulated loop view, (d) fabricated knitted sample (inset: close-up view of interconnections between conductive and non-conductive yarn).
Self-capacitive touch sensing mechanism
The working mechanism of the fabricated single-electrode-based self-capacitive touch sensor is based on the electrical charge-discharge principle when it is touched and when it is not. The detailed working mechanism of the sensing unit is described in Figure 4. At its initial state, as depicted in Figure 4(a), the sensor has a capacitance of Ca when it is not subjected to touch by any means. Here, the capacitance is measured by totally discharging it to the ground after charging it periodically. Therefore, the capacitance of the sensor is calculated as below:

When a current is applied to the sensor for a certain amount of time, the voltage (V) is measured, and the capacitance (Ca) is calculated according to equation (1).

Sensing mechanism of the self-capacitive touch sensor, which detects capacitance change between the sensor and a human finger when untouched (a) and touched (b).
When the sensor is touched by a human finger or other ferromagnetic objects, a parallel capacitor connection is established between the sensor (Ca) and the human finger (Cb), as shown in Figure 4(b). As a result, more charge is induced on the sensor surface, thus increasing the capacitance. So, the resultant capacitance (Cr) will be as follows:

Sensor characterizations
Results and discussion
Electromechanical performance of sensor
Among various fabric structures, double knit fabric was selected due to its desired wearability and mechanical performance. Good washability, resistance to mechanical stresses like abrasion and stretching, and high flexibility are some important parameters for wearables. The sensor shows good stability under repeated washing and mechanical stresses, that is, twisting and abrasion. Figure 5(a) shows little change in the capacitance of the sensor, that is, 2.86%, 1.62%, and 5.42% after repeated washing, twisting, and abrasion, respectively. Figure 5(b) shows the changes in capacitance while touching at different frequencies. It is observed that the sensor experienced minimal changes in capacitance after it was touched and untouched on frequencies of 0.7, 1, 2, and 4 Hz, respectively. To evaluate the different electromechanical performances of the sensor, identical structural parameters, that is, stitch length, stitch density, and conductive yarn type, were maintained while knitting the samples.

(a) The capacitance of the sensor under repeated touch-untouch in various states, that is, original, washing, twisting, and abrasion; (b) Changes in capacitance in response to various tapping frequencies, that is, 0.7–4 Hz; (c) Cyclic test results for up to 500 touch-untouch cycles. (inset: the output of the sensor between 200 and 210 cycles); (d) Capacitance value (pF) when the sensor is touched and untouched during the cyclic test; (e) The response and recovery time of the sensor.
In addition, the developed sensor shows good cyclic stability under repeated touch-untouch. The cyclic stability test was done up to 500 cycles with a frequency of 0.7 Hz, as shown in Figure 5(c). Figure 5(c)’s inset shows a zoomed-in version of a portion of the cyclic test. This shows minimal changes in capacitance, confirming the developed sensor’s practical applicability and robustness. During the cyclic tests, capacitance value of each touch and untouch is depicted in Figure 5(d) which shows that the mean capacitance during touching and untouching is 24.09 pF and 10.81 pF, respectively. The coefficient of variation of capacitance during touching is 1.25% and 3.47% when it remains untouched. This low coefficient of variation also demonstrates high stability of the sensor. To evaluate the practical use of the sensor, the response and recovery time of the sensor were measured by maintaining a touching frequency of 0.7 Hz, as shown in Figure 5(e). We observed that our developed sensor has a response and recovery time of ~80 ms. All of the electromechanical performances described in Figure 5 ensure that this sensor can be used in real-world applications.
Mechanical stability of sensor
The developed sensor shows good stability against different mechanical deformations, that is, twisting, folding, grasping, and pinching, as depicted in Figure 6(a) to (e). Even after the sensor underwent various mechanical deformations, it came back to its original state without sacrificing any notable electrical changes, as shown in Figure 6(f). The developed sensor shows good flexural properties with an average bending length of 1.74 cm, which assures the sensor’s ultra-flexibility.

Different mechanical deformations were applied to the developed sensor to assure its ultra-flexibility and stable electrical characteristics: (a) twist, (b) multi-fold, (c) grasp, (d) two-finger pinch, (e) two-fold, and (f) flat state.
Versatile touch sensing capability
As shown in Figure 7, the applicability of the sensor was tested by touching it with four different materials, that is, human finger, conductive fabric, metal nail, and non-conductive fabric. The sensor was independent of touch frequency or touch time throughout the test. It is evident that the sensor can detect any conductive material, including human fingers (Supporting Information, Figure S4). However, the non-conductive fabric was unable to establish a connection with the ground, so no parallel connection was made with the sensor, as shown in Figure 4. As a result, no contact was detected. This confirms our sensor’s suitability in the realm of human-machine interaction.

Sensor performance evaluation by tapping with (a) human finger, (b) conductive fabric, (c) metal nail, and (d) non-conductive fabric.
Comparative study
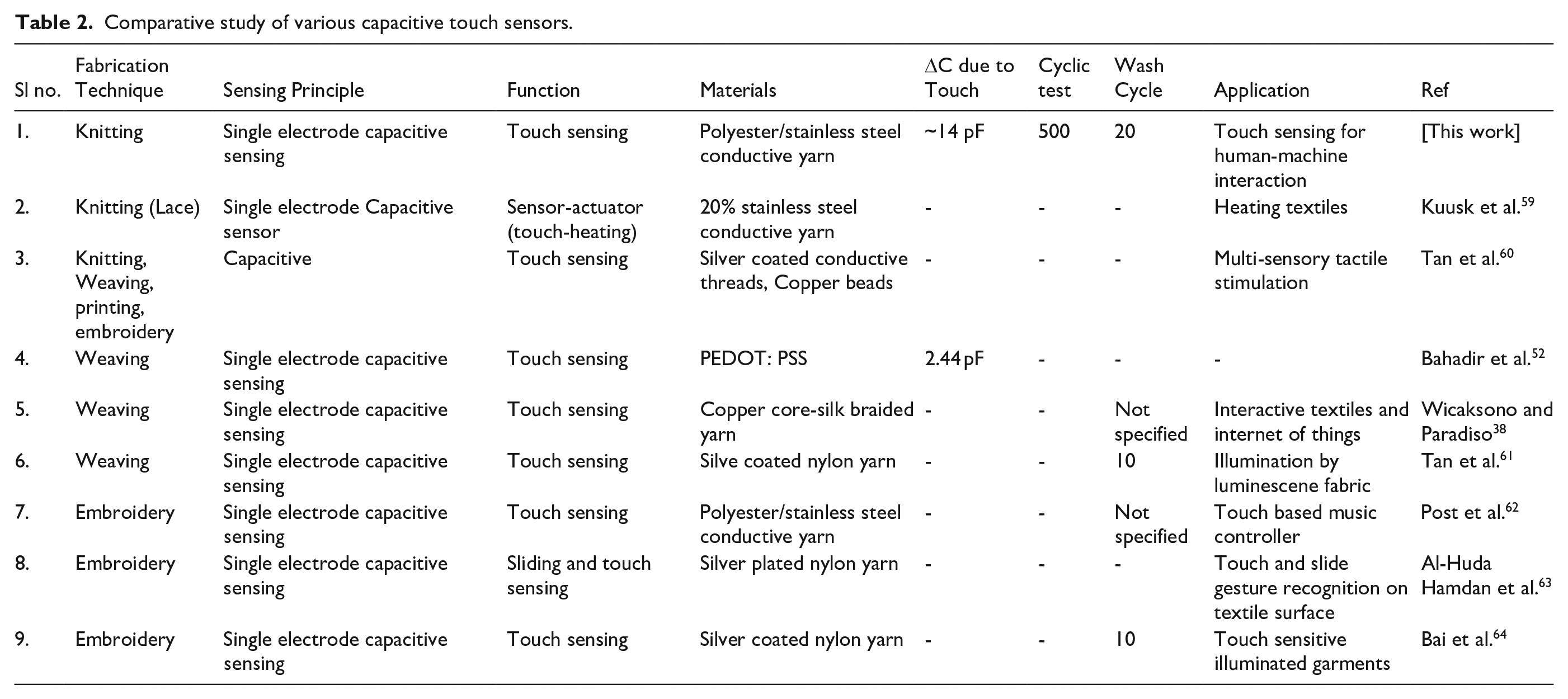
This work emphasizes the design and development of knitted capacitive touch sensors using the intarsia knitting technique. This technique offers minimal wastage and rapid prototyping compared to other fabrication techniques, including weaving, embroidery, sewing, printing, etc. Although various capacitive touch sensors using a single-electrode capacitive technique have been reported so far, the durability and washability of these textile-based touch sensors have hardly been discussed. Sensor performance in terms of change in capacitance due to touch is also an issue that has been overlooked in most literature. Table 2 below shows the comparative analysis among various capacitive touch sensors and their suitability in daily use. While direct comparison among various sensors is often difficult due to the versatility of different works, a few of the attributes have been discussed below.
Comparative study of various capacitive touch sensors.
Application demonstration of the developed sensor
The rapid response time, ultra-flexibility, and good cyclic stability combined with the controllable geometrical area widen the applicability of the machine knitted touch sensor. As our developed touch sensor demonstrates these characteristics, we integrated touch sensors into fabric in various sizes, shapes, and forms, that is, alphabet, number, rectangle, or square, to explore the versatility, applicability, and suitability of our developed sensor in human-machine interaction applications. In order to detect active touch, the developed sensor is independent of the human finger dimension. It is capable of detecting senses in any area of the body.
Figure 8(a) demonstrates the circuit interconnections between the touch sensors and the computer. Here, the sensor is connected to the ADC module via wired interconnection, and the ADC module is connected to the microcontroller unit by an I2C bus connection. The microcontroller is then connected to the computer via a USB cable. For these demonstrations, an ATmega32U4-based microcontroller has been used because it can transmit keystrokes to a connected computer via the microcontroller’s native USB connector. A detailed circuit diagram of the developed sensor is given in Supporting Information, Figure S7. Figure 8(b) shows the application of the developed sensor as a flexible keyboard (Movie S2, Supplemental Video). The keyboard detects each touch on the machine knitted alphabet and displays it on the computer screen. This application assures our sensor’s suitability as a highly flexible keyboard that can be used anywhere. The flexible capacitive sensor can be employed as a numpad and wristband, as shown in Figure 8(b) to (d). We placed the developed sensor on the hand as a smart wristband and a numpad that can be used anywhere without any hassle. Additionally, this hand wristband can be used as an interactive learning tool for kids and others.
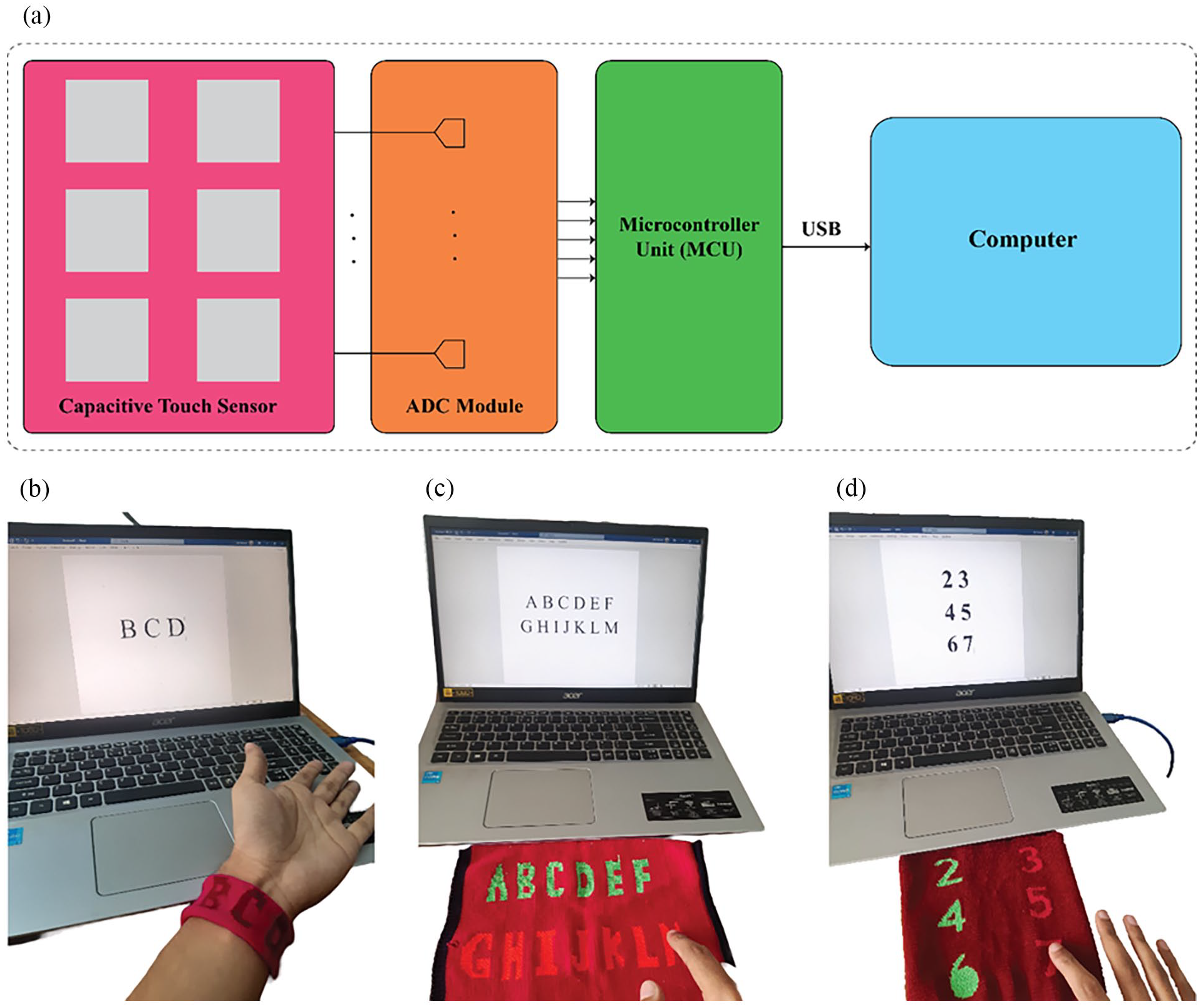
Real-time application demonstration of capacitive touch sensing smart textiles. (a) Schematic block diagram for acquiring touch signals for human-machine interaction. Working prototype of the developed sensor as machine knitted (b) wristband, (c) keyboard, and (d) numpad.
We further developed our sensor as a soft switch to demonstrate the use of this sensor in human-machine interaction. The developed sensor can be used as a flexible soft switch. As shown in Figure 9, a servo motor is controlled by the developed soft switch. When the sensor is touched, the rotor of the servo motor rotates from 0° to 180° (Figure 9(a) and (b)). When the sensor is touched again, the rotor returns from 180° to 0° (Figure 9(c) and (d); Movie S3, Supplemental Video). That means each of the touches is detected as an individual sense. This confirms the use of this sensor as a human-machine interaction tool that can be used for various robotics applications.

Application prototype of the developed sensor as a soft switch. The Motor shaft rotates from 0° (a) to 180° (b) and returns to its previous position from 180° (c) to 0° (d) in response to touch.
Conclusion
We report an easily customizable and fast manufacturing of single-electrode-based capacitive touch sensing textiles for smart textile applications. Our approach utilizes computerized flatbed knitting technology for easy integration of off-the-shelf conductive yarn onto non-conductive fabric to produce touch sensors. The fabricated sensors are washable, ultra-flexible, and bendable, demonstrating excellent cyclic stability, high responsiveness, mechanical stability, and broader touch sensing capability. We reveal the potentiality of the developed sensor as a proof of concept by simply embedding touch sensors in various forms, including an array of alphabets as a knitted keyboard and wristband, numbers as a numpad, and rectangular interfaces as a soft touch switch to control programmable servo motors. This seamless integration of touch sensors onto base fabric ensures rapid and robust functional integration, which accelerates the commercialization of touch sensors.
Supplemental Material
sj-docx-1-jef-10.1177_15589250251331051 – Supplemental material for Seamless integration of touch sensing smart textiles through computerized machine knitting
Supplemental material, sj-docx-1-jef-10.1177_15589250251331051 for Seamless integration of touch sensing smart textiles through computerized machine knitting by Md. Mohaddesh Hosen and Safi Ahmed in Journal of Engineered Fibers and Fabrics
Footnotes
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.