
Abstract
Based on the static resistive network investigated in Part 1 of this series, the resistive network model of the weft-knitted strain sensor with the plating stitch is explored under the elongation along course direction, and it changes with the conductive loops’ configuration and contact situation. Since the voltage is applied at both ends of the course, under a specific stretching state, the resistive network model can be reduced to a resistance network connected in series in the course direction and parallel in the wale direction, which determines that the sensor’s equivalent resistance increases with the growth of the conductive wale number, and decreases with the raise of the conductive course number. Through experiment and model calculation, it can be obtained that in the initial stage of stretching, the contact resistances’ changes are the main factors affecting the mechanical–electrical performance of the sensor. Then as the sensor is further stretched, the length-related resistances of the conductive yarn segments begin to affect the sensor’s properties due to yarns’ slippage and self-elongation. In addition, the weft jacquard plating technology makes the strain of the sensor reach about 32% before yarns’ slippage and self-elongation, which expands the sensor’s measurable strain range, and avoids irreversible deformation of the sensor after repeated use in this range. It can be verified that the sensor’s gauge factor can be improved by reducing the conductive course number and increasing the conductive wale number. It should be noted that the ground yarn will reduce the gauge factor of the sensor during stretching, so it is necessary to choose a ground yarn with a smaller fineness than the conductive face yarn and good elasticity in practical.
Keywords
Introduction
Conductive knitted fabrics can be used as flexible strain sensors for limb movement and physiological parameter monitoring.1–7 Some researchers have analyzed the influence of the fabric parameters of knitted sensors on their sensing performance through experiments.7–14 These studies can intuitively tell us the empirical results, but they lack theoretical support. Exploring the mechanical–electrical properties of the knitted strain sensors, especially the changes law of the internal resistive network under their working, is the key to helping us understand their sensing principles and provides a benefit to design and optimize sensors for different scenarios. Some scholars have examined the mechanical–electrical performance of conductive knitted fabrics in both theoretical and experimental aspects. Zhang 15 and Zhang et al. 16 investigated the mechanical–electrical properties of two overlapped conductive yarns and the weft plain knitted strain sensor in unidirectional stretching separately. Li et al.17,18 established the functional relationship between the tensile force and equivalent resistance of the conductive knitted fabrics compared with the results obtained in the unidirectional tensile experiments. Wang et al.19,20 theoretically deduced the connection between the tensile force and equivalent resistance of elastic plain knitted fabric during the stretching process verified through experiments. Xie et al. 21 also combined the experiments to confirm the relationship between the tensile force and the equivalent resistance of the conductive knitted fabric under biaxial stretching.
In the above surveys, the resistances involved are divided into contact resistance generated by the interlocking of the conductive yarns and length-related resistance. In practical applications, the weft plating technology is often adopted1,2,4,6,8,11–13,22 to increase the repeatability and stability of the sensor. The conductive yarn is used as the face yarn and the insulated elastic yarn used as the ground yarn in the sensing area. This plating stitch brings the new kind of contact resistance by the jamming of the conductive loops and the resistance dynamically varies in real-time during the deformation of the sensor. In the initial stage of tensile deformation in the course direction, the yarn segments, especially the needle loop and sinker loop, are straightened from the arc without slip. Simultaneously, the interlocking and jamming contact resistances are the main factors influencing the resistance change by rearranging the internal resistive network connections. As the stretching progresses, there exist the slippage and elongation of the segment yarn, causing the variations of the involved resistors in the resistive network. However, the existing mechanical–electrical analysis obviously cannot fully explain the working principle of compact weft-knitted strain sensors. Atalay et al. 7 designed a sensor with only one course in the sensing area. They discussed the sensor’s resistance change mechanism during stretching, highlighting the impact of jamming contact resistance. Nevertheless, this method actually ignored the interlocking contact resistance. Once the conductive loop is worn or contaminated, the performance of the sensor will be significantly affected.
So, the existing models rarely fully regarded the rearrangement and variations of various resistors in the resistive network model of knitted strain sensors under the deformation along course direction. In Part 1 of this series, 23 the resistive network model of the weft-knitted strain sensor with the plating stitch under static relaxation has been studied. This article continues to explore the corresponding equivalent resistive network model under the elongation along course direction through observing the changes in the configuration of the conductive loop and the contact situation between the conductive yarns. The established model fully examines various contact resistances and length-related yarn resistance and notices that the elastic ground yarn probably makes the interlocking contact resistance disappear. Finally, experiments are performed to verify the correctness and usability of the new model and analyze the relationship between the gauge factor and the conductive loop course and wale numbers of the strain sensors to provide theoretical support for subsequent design and preparation of sensors suitable for different applications.
Loop configurations and resistance distributions under deformation
Figure 1 exhibits the changes in the conductive loop configurations and the jamming contacts between the loops of the weft-knitted strain sensor with the plating stitch during the stretching along course direction. Herein the resistance distributions are depicted with three stages due to the variations in the loop shape as the following:
In Initial State, the resistive network includes the jamming contact resistance RC1, RC2, and RC4 (referring to the static relaxation in Part 1 23 );
In Second State, the resistive network contains the jamming contact resistances RC1 and RC4;
In Final State, the resistive network only consists of the jamming contact resistance RC4.
The arrangement of the yarn segments divided by the contact point where the contact resistance is located can also be seen from Figure 1. The corresponding length resistances are 0.5RL1_1, RL1_2, RL2_1, RL2_2. and RL3. Moreover, RL, RL1, and RL2 are the length resistances of the total loop, needle loop, and sinker loop respectively. The relationship among these length-related resistances are expressed as

The relative spatial position of the ground and face yarn mostly affects the contact of the conductive yarn of the face yarn in the interlocking point, as shown in Figure 2, which determines whether the interlocking contact resistance RC3 is present. Hence two resistive network models are supposed to be established, with one involving RC3 and the other not.

Loop configurations and resistance distributions, containing the Front Side and Reverse Side, of the weft-knitted strain sensor with the plating stitch during the stretching along course direction: (a and b) Initial State, (c and d) Second State, and (e and f) Final State.

Isolating impacts of the ground yarn on the conductive face yarn at the interlocking points during the elongation along course direction, which determine the existence of RC3: (a) Initial State, (b) Second State, and (c) Final State.
Establishment and calculation of the resistive network models under deformation
The resistive network models in Initial State refer to those established and solved in Part 1. 23 The following focuses on exploring the resistive network models in Second State and Final State.
From now on, it should be noted that M and N mean the number of conductive loop course and wale in the conductive region separately. The contact resistances involved in the resistive network are first divided equally to the branches connected to them, which have been used by other scholars. 18
Resistive network model containing RC3
Existing models have proved that when the voltage is loaded in the course direction, the resistive network is a series of resistances.18,19 Hence in this article, according to the arrangement rule of the conductive loops along the course direction, the resistive network model is first simplified into a series circuit in the course direction, as depicted in Figure 3. A simplified Second State resistive network composed of N-RC1-wale and RC1-wale is obtained by exchanging the conductive areas P1 and P2 (see Figure 3(a)). It obviously can be seen that the resistive network of Final State composed of N identical N-RC1-wale (see Figure 3(b)). Equation (2) is the relationship between the total and local voltage during the simplification. Assuming NCRcs (M_N)_step1 and NCRcs (M_N)_step2 are the total equivalent resistance of the respective resistive networks of the two stages, NCRcs (M_1) and NCRcss (M_1) are the equivalent resistances of N-RC1-wale and RC1-wale separately, then equation (3) can be obtained by Ohm’s law. 24

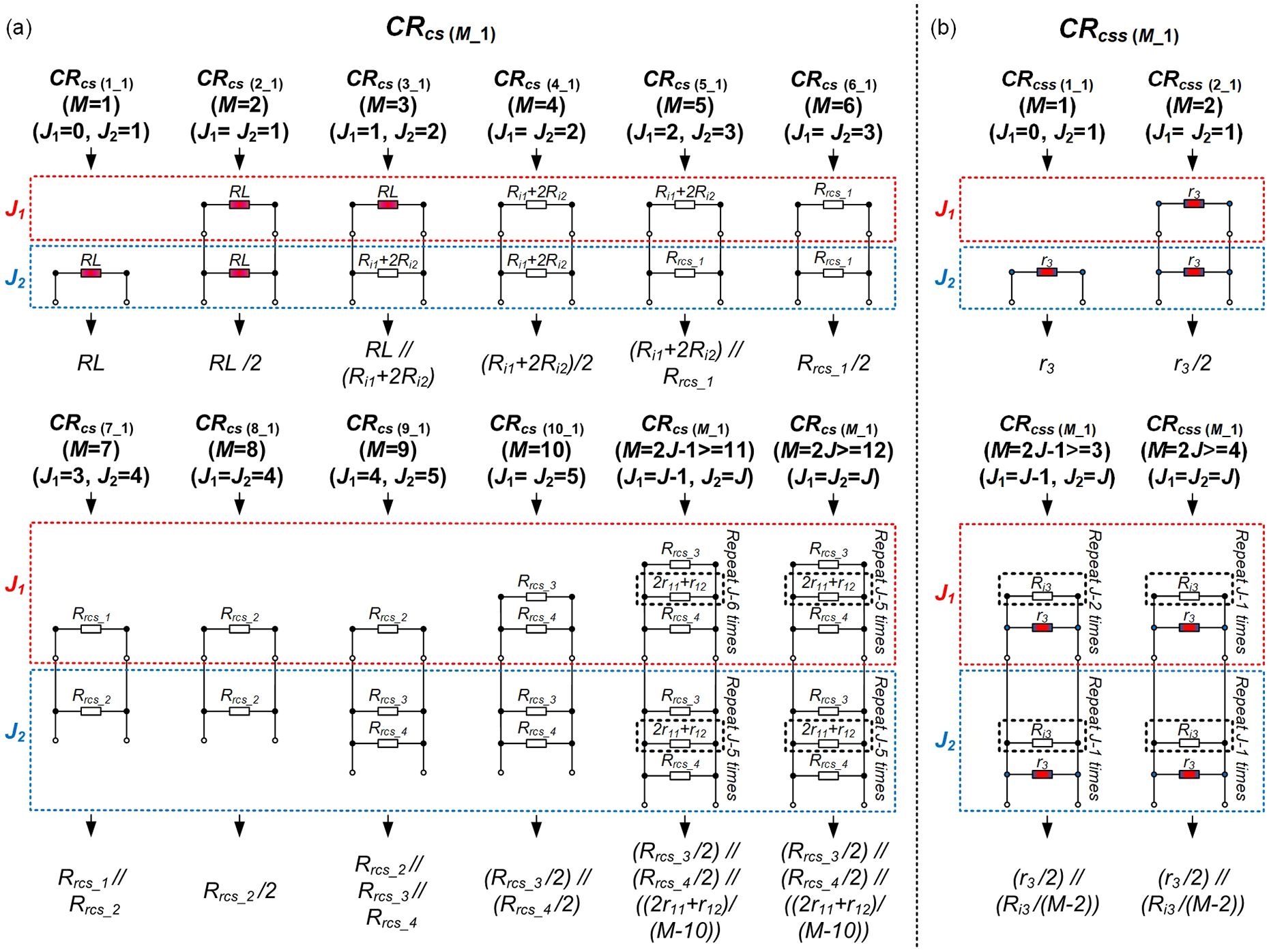
By Supplementary Theoretical Calculation 1, the final equivalent resistive circuits of NCRcs (M_1) and NCRcss (M_1) with different M and their corresponding equations can be summarized in Figure 4, where the symbol “//” indicates the parallel of resistances. A series of equivalent transformations (Supplemental Figures S1–S7) was used to simplify the resistive network during the calculation, such as evenly dividing the contact resistors into the branches connected to themselves, 18 splitting the nodes on the symmetry line, the merge of equipotential points, the four-terminal star to four-terminal network and the Y-Δ transformations, 24 the nodal analysis, 24 the series-parallel rule of resistance, 24 and removing the bridge resistors in the generalized Wheatstone Bridge. 18 So far, the theoretical calculations of NCRcs (M_N)_step1 and NCRcs (M_N)_step2 with different M and N can be summarized as equations (S21) and (S22) in Supplemental Material, respectively.

Simplifications of the weft-knitted sensor’s geometrical models in Second State and Final State, when voltage is applied to both ends of the course direction: (a) Step1: Second State and (b) Step2: Final State.

Final equivalent resistive circuits of NCRcs (M_1) and NCRcss (M_1) with different M and their corresponding formulas: (a) NCRcs (M_1) and (b) NCRcss (M_1).
Resistive network model ignoring RC3
The resistive network model established in this section does not regard the interlocking contact resistance RC3 due to overlooking the conductive face yarn’s isolation at the interlocking point caused by the elastic ground yarn.
First, according to the simplified method in Figure 3, CRcs (M_N)_step1 and CRcs (M_N)_step2 represent the total equivalent resistance of the network models in Second State and Final State, CRcs (M_1) and CRcss (M_1) indicate the equivalent resistances of N-RC1-wale and RC1-wale respectively, so the relationship between these resistances can be described as
Secondly, it should be noted that the different internal courses are only connected by RC4 in this resistive network model, making the entire resistive network composed of two sub-resistive networks in parallel. Assuming that J1 and J2 are the number of courses within the two sub-resistive networks, their values depend on the number of course M of the entire resistive network. Moreover, since the two sub-resistive networks change in the same pattern with the number of internal courses, J is used to indicate J1 and J2. Here the relationships among J1, J2, J, and M can be deduced as equation (5), which means that the values of J1 and J2 are different with a difference of one when M is an odd number and are the same when M is an even number. In the following, CRJcs (J_1) and CRJcss (J_1) are used to signify the equivalent resistances of N-RC1-wale and RC1-wale of the sub-resistive network, respectively.

CRcs (M_1) and CRcss (M_1) with the specific M can be solved by Supplementary Theoretical Calculation 2. Some equivalent transformations (Supplemental Figures S1 and S8–S11) are used, for example, evenly dividing the contact resistances into connected branches, 18 the merging and rearrangement of the equipotential points, the nodal analysis, 23 removing the bridge resistors in the generalized Wheatstone Bridge, 18 and the series-parallel rule. Moreover, the final equivalent resistive circuits of CRcs (M_1) and CRcss (M_1) with different M and their corresponding equations can be concluded in Figure 5, revealing the relationships between CRcs (M_1) and CRJcs (J_1), CRcss (M_1) and CRJcss (J_1). So far, the theoretical calculation of CRcs (M_N)_step1 and CRcs (M_N)_step2 with different M and N can be deduced as equations (S48) and (S49) in Supplemental Material separately.
Final equivalent resistive circuits of CRcs (M_1) and CRcss (M_1) with different M and their corresponding formulas: (a) CRcs (M_1) and (b) CRcss (M_1).
Experiment and model calculation
Materials prepared
Employing the weft jacquard plating technology in Part 1, 23 111dtex silver-plated nylon filament as the conductive yarn was used as the face yarn in sensing area whose resistivity ρ and diameter d are 571.5 Ω/m and 0.1596 × 10−3 m respectively. In contrast, 86dtex low-elastic nylon yarn as the normal insulated yarn was used as the face yarn in the non-sensing area, and the same ground yarns in the two areas are 44dtex/33dtex nylon/spandex covered yarn. All strain sensors were prepared on SANTONI SM8 TOP2 MP seamless knitting machine with gauge 28 under the same process parameters with the samples prepared in Part 1. 23
Measurements of the strain along course direction in different tensile states
Using the method described in Supplementary Experiment 1, the strain along course direction (referred to ε in Figure 6) in different tensile states can be gauged. As shown in Figure 6, the variations of the jamming contact resistances during the loop deformation along course direction were further subdivided into the following stages: Initial State including contact resistances RC1, RC2, and RC4, Second State containing Second State_1 and Second State_2 having contact resistances RC1 and RC4 and Final State involving only contact resistance RC4.

The Enlarged conductive loop configurations of the sensor, containing the Front Side and Reverse Side, in different tensile states with the corresponding strain ε: (a and b) Initial State, (c–f) Second State, and (g and h) Final State.
Then, during the elongation, it can be concluded that when ε is in the range of 0% to 10.8720%, the resistive network model refers to those of Initial State, hence the static relaxation resistive network model established in Part 1 can be used. 23 When ε is separately in the ranges of 10.8720% to 31.8443% and 31.8443% to 93.3445%, the resistive network models are consistent with those of the Second State and Final State.
Mechanical–electrical performance testing
The numbers of course and wale in the sensing area are considerable factors affecting the mechanical–electrical properties of the knitted strain sensor, so the conductive course numbers of the samples were designed to be 4, 10, and 14 differently while the conductive wale numbers were 50, 100, and 150 respectively.
The testing set (see Supplemental Figure S14) and method for the mechanical–electrical performance were depicted in Supplementary Experiment 2. The reason why 0% to 10% was selected as the strain range was to combine the initial empirical numerical values of each resistance obtained in Part 1 23 to calculate and probe the factors that affect the resistance value in this range. It is assumed that the yarn cross-section is always round, and the fiber arrangement within the yarn is unchanged. It can be seen from Figure 6 and Table S1 in Supplemental Material that the three-dimensional needle loop gradually expands without stretching itself during the process with the strain ε from 0 to 10%, which means the resistance of each yarn segment does not change. The main factor that influences the change of resistance is the variation of contact resistance RC2.
Calculations of resistive network models in different tensile states
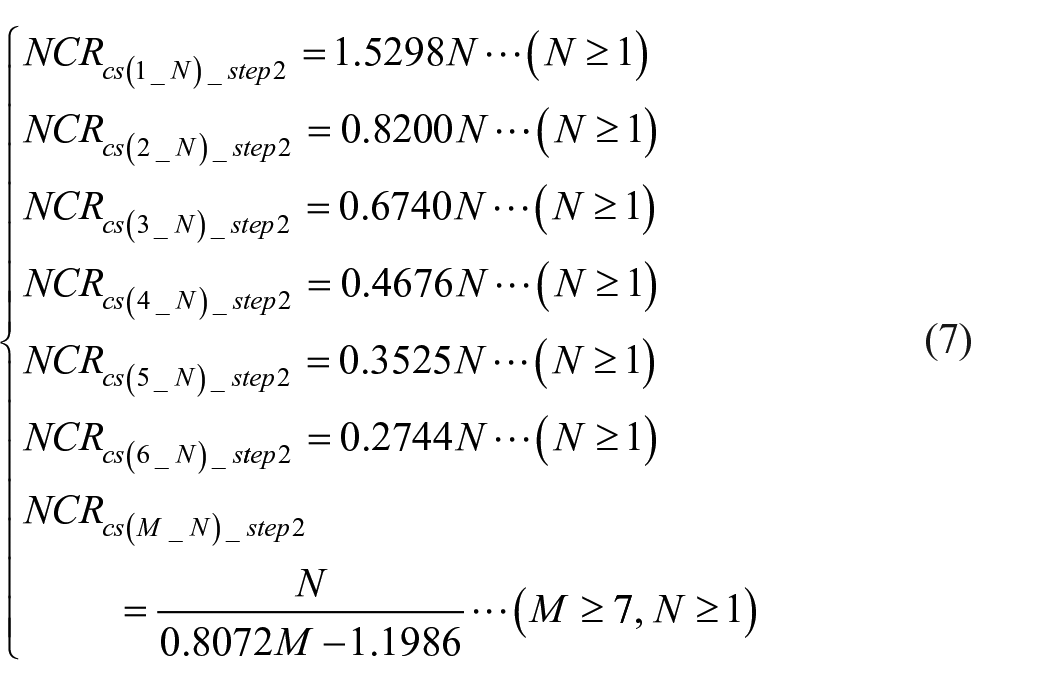
The calculations for the resistive network models in Initial State have been exhibited in Part 1, 23 and the relevant equations were summarized in Supplementary Model Calculation. Then, to inquire into the effect of models in different stages on the equivalent resistance, it is assumed that all contact resistances and length-related resistances have not changed with their values showed as equations (S51) in Supplemental Material. According to the resistive network models established in this article and using MATLAB software, the equivalent resistance expressions can be deduced, shown as equations (6) to (9), where equations (6) and (7) deliver the calculation results of the resistive network model involving RC3, and equations (8) and (9) display the calculation results of the model ignoring RC3.



Results and discussion
Changes of length-related and contact resistances in different tensile states
Assuming that the cross-sections of the conductive loops are all round with same size and the cross-sectional area is represented by As, then using the law of resistance, 24 the length resistance of each yarn segment can be determined by

Besides, according to Holm’s contact theory, 25

Among them, RC means the contact resistance (Ω), ρ is the electrical resistivity (Ω/m), H indicates the material hardness (N/m2), n stands for the inner number of contact points within contact area, and P represents the contact pressure. Due to the values of ρ and H remaining unchanged when the environment and the material are determined, RC is inversely proportional to n and P. Accordingly, each contact resistance can be calculated by
The accurate values of the inner numbers of contact points (nc1, nc2, nc3, nc4) and contact pressures (Pc1, Pc2, Pc3, Pc4) are challenging to achieve. The changing trends of contact resistances can be analyzed instead by observing the variations of the loop in Supplemental Figure S12 and combining with equation (12).
By Supplementary Analysis of Changes in Length-related and Contact Resistances, the resistances’ changing trends in different tensile states can be summarized as Table 1, where “→” means the variable remains the same, “↗”and “↘” represent the rise and reduction of the variable, “↘↗” implies the variable goes down and then goes up, and “Inf” refers the variable is infinite.
The changing trends of length-related and contact resistances in different tensile states.

In practical applications, as the number of repetitive uses grows, the slippage and elongation of the yarn segment tend to cause irreversible deformation of the sensor, so controlling the strain range before these variations can improve the service life of the sensor. The introduction of elastic yarn in the plating stitch makes the fabric tighter so that the sensor can achieve the expected strain without the yarn slippage and elongation. As shown in Figure 6 and Table S1 in Supplemental Material, yarn slippage and elongation only occur if ε > 32%. The sensor can be used in the scenario needing the strain range in 0% to 32% due to its high repeatability and service life.
Mechanical–electrical performance analysis
The results of the mechanical–electrical property tests were depicted in Figure 7, containing the relationship curves of ΔR/R0 and ε of the samples with different M(4, 10, 14) and N(50, 100, 150) and the relationship curves between the gauge factor G and ε, as displayed in Figure 7(a) and (b), respectively, where G can be determined by12,20

It can be seen clearly from Figure 7 that the resistance change rate ΔR/R0 increases non-linearly as the rise of ε. At the same time, G declines non-linearly as the rise of ε, and they both go up with the growth of N under fixing M and go down with the raise of M under fixing N.
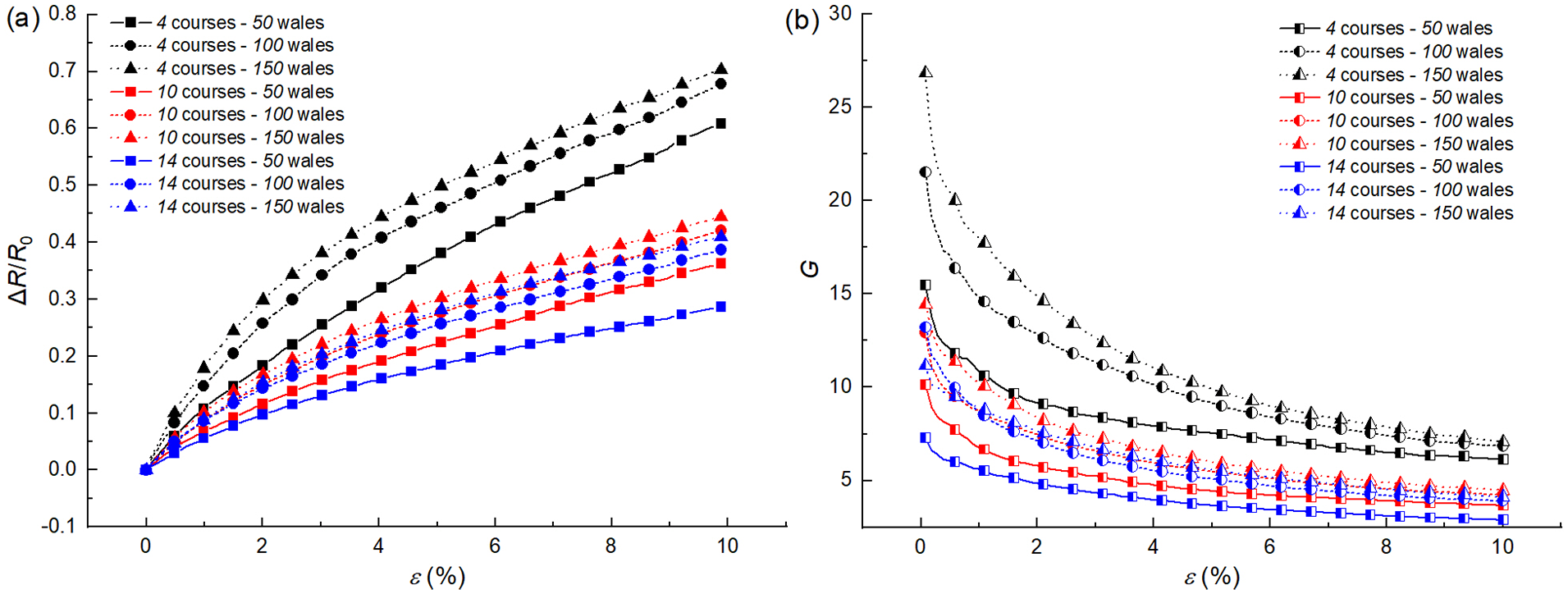
Results of the mechanical–electrical analysis: (a) curves of ΔR/R0 and ε of the samples and (b) curves between the gauge factor G and ε.
Comparison the gauge factor G of experiment and model calculations
Assuming that the resistive network models are already close to those under Second State_1 when ε = 10%, that is, the equivalent resistance of the network can be calculated by those models in Second State, then the gauge factors can be determined by

Where NCG is the gauge factor calculated by the resistive network model with RC3, while CG is the gauge factor calculated by the resistive network model without RC3, and the remaining variables can be obtained from equations (6) and (8) and equations (S52) and (S53) in Supplemental Material.
Therefore, the gauge factor G, no matter in experiment or model calculations when ε = 10%, can be solved and the results corresponding to the prepared samples are listed in Table 2 and the expressions of NCG and CG corresponding to the sensor with different M and N (M>= 11, N ⩾ 1) can be achieved as

When ε = 10%, the gauge factor G of the experiment and model calculations.
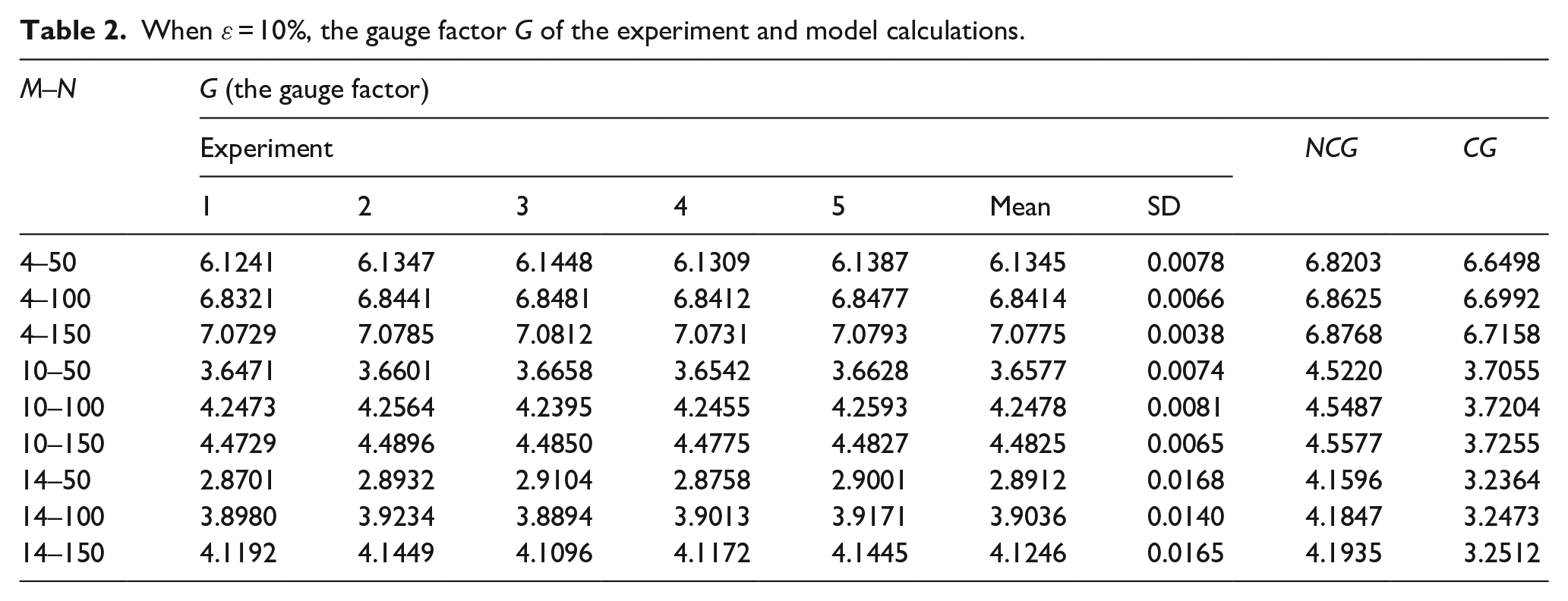
It can be gotten that there exist specific gaps between the experimental and model calculation data by plotting the data in Table 2, resulting in Figure 8. Moreover, their data changing trends are consistent, that is, each kind of G goes down with the rise of M under fixing N (see Figure 8(a)–(c)) and goes up with the raise of N under fixing M (see Figure 8(d)–(f)). It should be noted that when M is fixed, the increasing trend of G of the experiment is evident. Simultaneously, the model calculations, NCG and CG, are not apparent with the increase of N, which is related to the loops’ geometrical regularity and the relative spatial position of the face and ground yarns in the real samples. In contrast, the loop corresponding to the resistive network model is assumed to be an ideal state. In addition, the NCG of each sensor specification is higher than CG. The calculating G of the resistive network model with RC3 is higher than that of the network model without RC3, indicating the presence of the interlocking contact resistance RC3 can improve the sensor’s gauge factor.

When ε = 10%, the comparison of the gauge factor G of the experiment and model calculations: (a–c) fixing the wale number N (50, 100, 150) separately, the plots of G and course number M and (d–f) fixing the course number M (4, 10, 14) separately, the plots of G and wale number N.
Next, MATLAB was used to make the three-dimensional surface graphs of equation (15) illustrated in Figure 9. Figure 9(a) is a comprehensive three-dimensional surface graph of NCG and CG, clearly indicates that NCG is always higher than CG. From the respective three-dimensional surface plots of NCG and CG in Figure 9(b) to (e), it can be achieved that NCG and CG both ascend with the rise of N in a decreasing rate and descend with the growth of M in a reducing rate. Then, NCG and CG both finally tend to be a stable value with the raises of M and N. It can be suggested that the effect of M on the gauge factor is greater than that of N on gauge factor from the projections on the x–y plane combined with the color bars. Therefore, in the case of the determination of raw materials and applying the voltage on the ends of course, in order to design a sensor with high sensitivity, the primary method is to determine the number of conductive courses as low as possible, followed by increasing the number of conductive wales.

When ε = 10%, the relationships among NCG, CG, M, and N: (a) 3-D surface of NCG and CG in the same coordinate, (b and c) relationship among NCG, M, and N, and (d and e) relationship among CG, M, and N.
Effect of contact resistances on equivalent resistance during the stretching form Initial State to Second State_1
As displayed in Table 1 and Supplemental Figure S12, during the stretching form Initial State to Second State_1, each length-related resistance remains unchanged and the most significant change is that RC2 increases, RC3 decreases while RC1 and RC4 are unchanged. In addition, the resistances’ connections in the resistive network model are the same as those established in Part 1 23 until the RC2 disappear in the model. So, the resistive network model in Part 1 is induced to discuss the effects of RC2 and RC3 on the equivalent resistance during the stretching form Initial State to Second State_1.
The graphs of NCRst (M_N) with RC2 and RC3 can be made by MATLAB, as shown in Figure 10, through using the initial value of each resistance except for RC2 and RC3 in equation (S51) in Supplemental Material, where RC2 takes the value range of 3.0230 to 2500 and RC3 is from 0 to 0.3528. Figure 10(a) to (f) show the respective graph when M is fixed at 4, 10, and 14 separately. Figure 10(g) to (l) depict the individual graph when N is fixed at 50, 100, and 150 respectively. They indicate that NCRst (M_N) increases to a specific value with the rise of RC2, declines negligibly with the growth of RC3, and ascends as N rises and reduces as M raises.
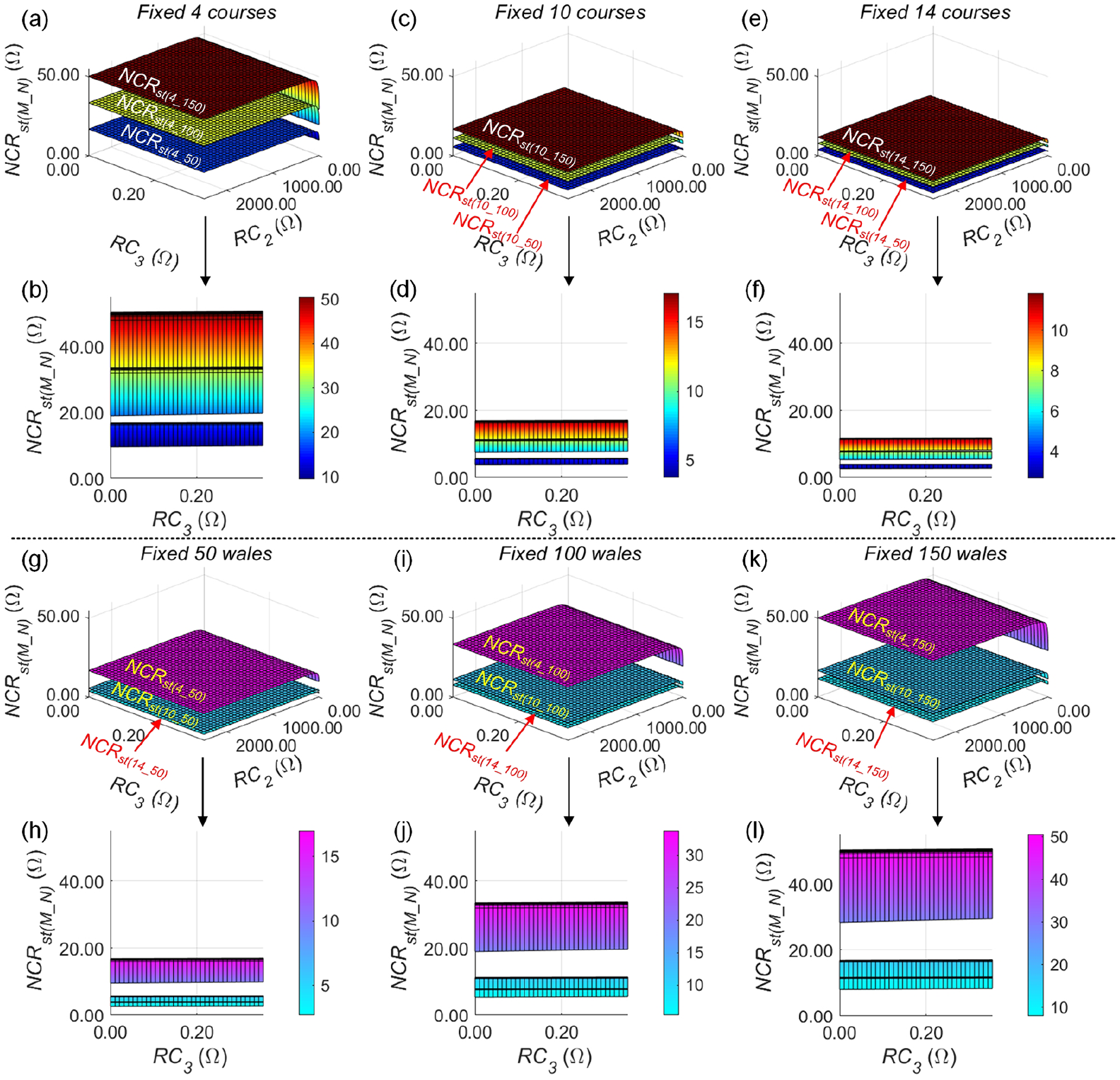
Impacts of RC2 and RC3 on NCRst (M_N) form Initial State to Second State_1: (a–f) fixing course number M separately, the 3-D surfaces of NCRst (M_N), RC2 and RC3 and their projections on RC3-NCRst (M_N) plane and (g–l) fixing wale number N separately, the 3-D surfaces of NCRst (M_N), RC2 and RC3 and their projections on RC3-NCRst (M_N) plane.
In the same way, the relationship between CRst (M_N) and RC2 is explored using the resistive network model without RC3 in Part 1. 23 As shown in Figure 11, CRst (M_N) goes up as RC2 rises and tends to a stable value, and grows with the increase of N and decreases with the raise of M.

Impact of RC2 on CRst (M_N) form Initial State to Second State_1.
Effect of different tensile states on equivalent resistance
According to equation (S52) in Supplemental Material and equations (6) and (7), the analysis results of the equivalent resistance of the sensor with different M and N at different stretching stages can be conducted in Figures 12 and 13. It can be gotten that NCRst (M_N) < NCRcs (M_N)_step1 < NCRcs (M_N)_step2 except for M = 1, 2 (NCRst (M_N) < NCRcs (M_N)_step2 < NCRcs (M_N)_step1), and each of them decreases non-linearly as M grows and increases linearly as N rises. Also, the differences among the resistances in different tensile states ascend with the growth of N and descend with the raise of M.

Fixing course number M, the plots of resistance and wale number N of different models concerning RC3, where 1 = <M, N< = 10: (a) when N = 1, 2, 3, 4, 5 and (b) when N = 6, 7, 8, 9, 10.

When M> = 11 and N> = 1, the 3-D surface of the resistance, M and N of the diverse models concerning RC3 and their projections on each plane: (a) 3-D surface, (b) projection on the x–z plane, and (c) projection on the y–z plane.
Meanwhile, equation (S53) in Supplemental Material and equations (8) and (9) are analyzed, resulting in Figures 14 and 15. Similarly, it can be implied that CRst (M_N) < CRcs (M_N)_step1 < CRcs (M_N)_step2 except for M = 1, 2 (CRst (M_N) < CRcs (M_N)_step2 < CRcs (M_N)_step1), each of them reduces non-linearly as M increases and grows linearly as N rises. The differences among them goes up as N ascends and goes down as M raises.

Fixing course number M, the plots of resistance and wale number N of different models without concerning RC3, where 1 = <M, N< = 10: (a) when N = 1, 2, 3, 4, 5 and (b) when N = 6, 7, 8, 9, 10.

When M> = 11 and N> = 1, the 3-D surface of the resistance, M and N of the diverse models without concerning RC3 and their projections on each plane: (a) 3-D surface, (b) projection on the x–z plane, and (c) projection on the y–z plane.
Here, the reason of NCRcs (M_N)_step2 < NCRcs (M_N)_step1 and CRcs (M_N)_step2 < CRcs (M_N)_step1 when M = 1, 2 is that the variations of the related resistances during the elongation has not been taken into account, just using the same values of the resistances as those in Initial State.
Conclusion
This article has further established and calculated the resistive network model of the weft-knitted strain sensor with the plating stitch during the elongation along course direction. It can be seen that the resistive network model of the sensor changes with the conductive loops’ configuration and contact situation. Similar to the method for establishing model in Part 1 of this series, 23 two models with one including RC3 and the other not were explored. In the case of applying the voltage at two ends of the course, the resistive network at different elongation stages was simplified to a series-parallel resistive network which is connected in series along course direction and parallel along the wale direction. It can be verified from experiment and theoretical analysis that the sensor’s equivalent resistance, under a specific elongation, increases linearly with the rise of conductive wale number and decreases non-linearly with the rise of conductive course number.
Through experiment and model calculation, it can be obtained that in the initial stage of stretching, the contact resistances’ changes are the main factors affecting the mechanical–electrical performance of the sensor. Then as the sensor is further stretched, the length-related resistances of the conductive yarn segments begin to affect the sensor’s mechanical–electrical properties due to yarns’ slippage and self-elongation. In addition, the weft jacquard plating technology makes the strain of the sensor reach about 32% before yarns’ slippage and self-elongation, which expands the sensor’s measurable strain range, and avoids irreversible deformation of the sensor after repeated use in this range. According to the results and discussion, the sensor with high gauge factor can be obtained by reducing the number of conductive courses and increasing the number of wales in the sensing area. At the same time, the ground yarn’s diameter should be lower than that of the conductive face yarn to avoid reducing the gauge factor during stretching.
Admittedly, because it is challenging to determine the values of the diverse concerning resistances in the resistive network under all tensile state from the experiment, the experimental section in this article mainly focused on the elongation from Initial State to Second State_1.
The research in this article will help the subsequent design and preparation of suitable sensors for monitoring limb movements, such as hand movements, elbow joint movements, and knee joint movements.
Supplemental Material
Supplementary_Materials – Supplemental material for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 2: Resistive network model during the elongation along course direction
Supplemental material, Supplementary_Materials for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 2: Resistive network model during the elongation along course direction by Yujing Zhang and Hairu Long in Journal of Engineered Fibers and Fabrics
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.