
Abstract
The resistive network model of the weft-knitted strain sensor with the plating stitch under static relaxation is studied based on the knitted loop structure and circuit principle. The prepared sensors are divided into the sensing area and the non-sensing area. The former consists of the conductive face yarn and the insulated elastic ground yarn, while the latter includes the normal face yarn and the same ground yarn. The loop of conductive face yarn not only produces length-related resistance but also causes the jamming contact resistances along the width and length direction. Besides, the elastic ground yarn has a potential impact on the contact situation of the conductive face yarn at the interlocking point, determining whether the interlocking contact resistance exists. Therefore, two resistive network models have been established accordingly. In addition to the length-related resistance, the first model focused on both the jamming and interlocking contact resistances, while the second one only dealt with the jamming contact resistance. In the case of applying voltage along the two ends of the course, the theoretical calculations of the corresponding network models were performed using a series of equivalent transformations. Finally, the correctness and usability of the two models were verified through experiments and model calculations. It was found that both models can predict that the equivalent resistance increases with the conductive wale number and decreases with the conductive course number. It was implied that the first model’s calculating resistances are closer to the experimental data and lower than those of the second model. The difference in the calculating resistances of the two models would become smaller as the course number increases. Thus, the investigation indicates that the jamming contact resistance has a more considerable influence on the resistive network than the interlocking contact resistance.
Keywords
Introduction
Knitted strain sensors, owing to their excellent extensibility and elastic recovery, have been increasingly used in body motion sensing and physiological parameter monitoring in recent years,1–11 such as elbow and knee movement monitoring,1,2,5,9,11 hand movement monitoring,2,5,8,10,11 and respiratory monitoring.2,6,7 There remain various methods used to prepare the knitted strain sensors in which applying conductive yarns to knitted strain sensors directly through knitting technology is the preferred method for some researchers.1,2,6–9 Besides, there exist investigators using knitted fabric as substrates to make conductive strain sensors by chemical treatment.10,11 Also, sewing the conductive yarn or conductive thread on high-elastic knitted fabric can get the strain sensors. 5 The new worm-shaped filaments, 3 with distinctive strain-insensitive behavior, provide a choice for the connection between knitted strain sensor and data acquisition unit.
The knitted strain sensors can be adopted if they have high sensitivity and repeatability, which is determined by their internal circuits. Therefore, some scholars have studied their internal resistive network model and analyzed their mechanical-electrical properties in tension verified by experiments. Zhang 12 and Zhang et al. 13 studied the mechanical-electrical performance of weft jersey strain sensors from the fiber-yarn-fabric levels. Furthermore, they gave a general method for calculating the equivalent resistance of the resistive network. Li et al.14–16 established a resistive network for weft plain strain sensors and experimentally investigated the effects of length-related resistance and contact resistance on the mechanical-electrical properties of the sensors in unidirectional tension. Wang et al.17,18 further improved the solution of the resistive network and mechanical-electrical analysis of the weft-knitted sensors based on the resistive network model given by Zhang et al. 13 Further, they explored the factors affecting the sensor performance in combination with experiments. Xie and Long19,20 solved the resistive network model of weft-knitted strain sensors under biaxial elongation and analyzed the corresponding mechanical-electrical properties. Liu et al.21,22 further enriched the influences of float and tuck stitches on the resistive network of weft-knitted strain sensors. These mechanism studies have generally concluded that the knitted strain sensors’ mechanical-electrical properties are related to the resistive network composed of the length-related resistance of the conductive yarn loops and the contact resistance due to the touching of the loops. It is universally acknowledged that the length-related resistance is concerned with the diameter and electrical conductivity of the conductive yarn, and the contact resistance is related to the hardness, resistivity, contact area, and pressure of the conductive material itself. The connection between various resistors in the resistive network depends on the stitch of the knitted strain sensors and the contact situation between the conductive yarns. Furthermore, above all, the way of the voltage loaded on the sensors affects the final equivalent resistance.
It has been proven that the sensitivity, repeatability, and stability of the knitted strain sensor can be effectively improved through the weft plating technology, that is, using the conductive yarn as the face yarn and the insulated elastic yarn as the ground yarn in the sensing area.19,23,24 The addition of an elastic ground yarn increases the contact between conductive yarn loops, thereby changing the type and distribution of internal contact resistances. However, the existing resistive network models rarely take various contact resistances into account, usually only considering the contact resistance caused by the interlocking of the conductive yarn loops while ignoring those caused by the jamming of the loops. Furthermore, these different types of contact resistances and the length-related resistances separated by the contact points in the resistive model are dynamically changing to respond to strain when the sensor is extended. Thoroughly studying the effects of these contact resistances and length-related resistance can more clearly understand the sensing mechanism of knitted strain sensors, and provide theoretical support in sensor optimization. Hong et al. 25 established a resistive network model regarding the jamming and interlocking contact resistances of a compact knitted strain sensor. However, this model aimed at a weft jersey strain sensor in a circular form with the voltage is applied at both ends in the wale direction.
This article takes the weft-knitted strain sensor with the plating stitch as the research object and focuses on studying its internal resistive network under static relaxation to modify the existing models. The effects of the elastic ground yarn on the resistive network will be thoroughly examined, including the re-divided length-related resistance, the jamming contact resistance, and the interlocking contact resistance. In the case of applying voltage along the two ends of the course, the two internal resistive networks are modeled, and their equivalent resistances are calculated. Finally, the newly established models are used to calculate the equivalent resistance of the resistive network with specific numbers of conductive loop course and wale to further verify the correctness and usability of the model by comparing it with the experimental data.
The basic unit of the weft-knitted strain sensor with the plating stitch
Weft jacquard plating technology
Based on the weft jacquard plating technology, three kinds of yarn were used to prepare the knitted strain sensor, including the sensing area and non-sensing area (see Figure 1). As shown in Figure 1(a)–(b), the conductive yarn (colored with black) and the insulated elastic yarn (colored with white) are used as the face yarn and the ground yarn in the sensing area, respectively. The normal yarn (colored with gray) used as the face yarn and the same ground yarn consists of the non-sensing area.
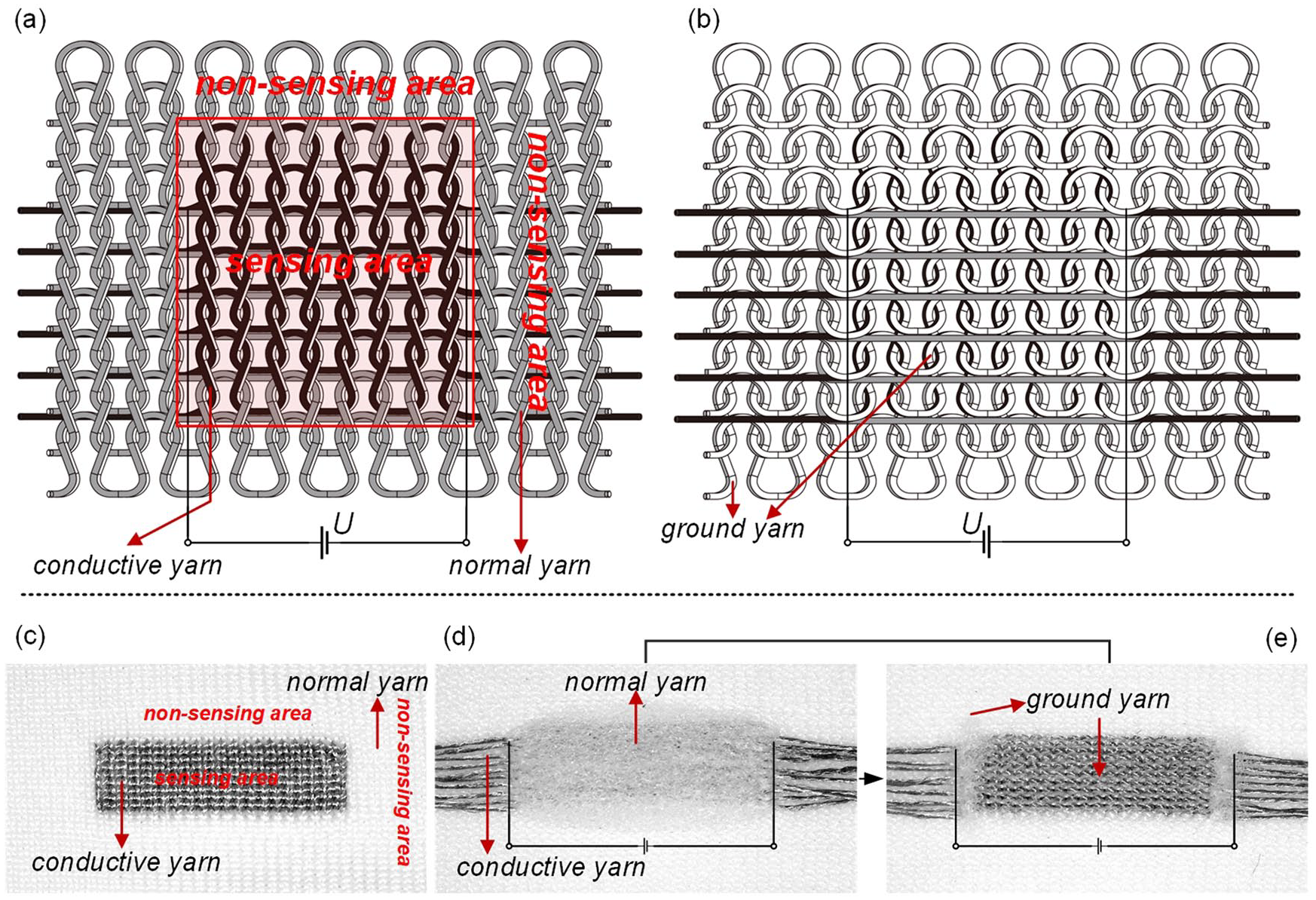
Schematic and physical diagrams of weft-knitted strain sensor prepared by the weft jacquard plating technology: (a, b) Schematic diagrams of the strain sensor, including (a) Front Side and (b) Reverse Side, being composed of sensing area and non-sensing area, and (c–e) the corresponding physical diagrams of the strain sensor, containing (c) Front Side and (d, e) Reverse Side.
Figure 1(c)–(e) displays the real knitted strain sensor. Herein, the conductive yarn in the sensing area is silver-plated nylon filament. In contrast, the face yarn in the non-sensing area is low-elastic nylon filament, and the ground yarns of both areas are nylon/spandex covered yarn. Besides, the floats of normal yarns (see Figure 1(d)) in the reverse side of the sensing area were cut off (see Figure 1(e)) in order not to interfere with the stretch and recovery of the sensor. Besides, the voltage is loaded on the conductive floats along the two ends of the loop courses.
The definitions of the concerning contact resistances
The weft plating technology makes the plating fabric (shown in Figure 2(c)–(d)) tighter and more uniform than the plain fabric, as displayed in Figure 2(a)–(b), due to the addition of elastic ground yarn. The plain fabric only has the interlocking contacts between conductive yarns (Figure 2(a)–(b)). In contrast, the plating fabric shows the jamming contacts between conductive yarns both along the width and length direction (Figure 2(c)–(d)). Thus, the corresponding contact resistances are defined as RC1, RC2, RC4, and RC3, respectively; among them, RC1 and RC2 represent the jamming contact resistances along the width direction, RC4 is the jamming contact resistance along the length direction, and RC3 indicates the interlocking contact resistance. As illustrated in the enlarged views in Figure 2(c)–(d), the ground yarn isolates the contacts between conductive yarns of the interlocking points, which causes the disappearance of RC3. Therefore, two resistive network models are established in this article. The first model deals with both the jamming and interlocking contact resistances, and the second one only focuses on the jamming contact resistances.

Comparison of physical diagrams of the weft-knitted strain sensor without and with the plating stitch separately and definitions of the concerning contact resistances: (a, b) Physical diagrams of the strain sensor without the plating stitch, including (a) Front Side and (b) Reverse Side (b), with the enlarged views of interlocking points with RC3, and (c, d) physical diagrams of the strain sensor with the plating stitch marked with RC1, RC2, and RC4, containing (c) Front Side and (d) Reverse Side, with the enlarged views of interlocking points without RC3.
Establishment and theoretical calculation of the resistive network models under static relaxation
In this section, the following models are therefore discussed separately:
Resistive network model with RC1, RC2, RC3, and RC4;
Resistive network model with RC1, RC2, and RC4;
From now on, it should be noted that M and N mean the number of loop courses and wale in the sensing area, respectively.
Resistive network model with RC1,RC2,RC3, and RC4
After specifying the various contact resistances, the length-related resistances re-divided by the jamming and interlocking contacts between conductive yarn loops should be defined. Peirce’s geometrical model of the plain stitch is used to observe the distribution of the different resistors (see Figure 3). 26 The actual contact area is minimal due to the current constriction at the contact points,17,27 so the contact areas are simplified to small points dividing the conductive yarns to some length sections. In Figure 3(a) and (c), L1 represents the total length of the needle loop, L1_1 and L1_2 are the partial lengths of the needle loop divided by the points of RC1 and RC4, L2 indicates the total length of the sinker loop, L2_1 and L2_2 are the partial lengths of the sinker loop divided by the points of RC2 and RC4, and L3 refers to the length of the leg, respectively. Therefore, the corresponding length-related resistances are defined as RL1, RL1_1, RL1_2, RL2, RL2_1, RL2_2, and RL3. Besides, assuming L as the total loop length, its corresponding length-related resistance is expressed as RL. Then, according to the geometry model, the relationships of these length-related resistances can be described as


Distributions and definitions of the contact resistances and length-related resistances, using Peirce’s 26 geometrical model of the plain stitch: (a) Front Side marked with resistances, (b) Cross-Section corresponded with (a), and (c) Reverse Side corresponded with (a).
Hence, referring to the distribution of diverse resistances in the geometrical models (see Figures 4(a) and (c) and 5(a) and (c)), the prototypical resistive networks of the weft-knitted sensor with different M and N can be constructed as shown in Figures 4(b) and (d) and 5(b) and (d). It can be concluded as the following:
When M ⩾ 1, the resistive networks all contain RC1 and RC2 when N ⩾ 2 and only contain RC2 when N = 1;
When M ⩾ 2, RC3 occurs in the network due to the interlocking between conductive yarns;
When M ⩾ 3, RC4 appears in the network because of the contact between the courses separated by one course.
During the theoretical calculations of the resistive network models, some equivalent transformations are used to simplify the model to the easy-to-solve resistive network. The existing theoretical models have been confirmed that the equivalent resistances of the knitted plain strain sensors are proportional to the wale number when the voltage is applied to both ends of the course direction.16,17,22

Distributions of diverse resistances and prototypical resistive network model concerning RC3: (a) Distribution of diverse resistances in the geometrical model when M = 1, (b) prototypical resistive network when M = 1, (c) distribution of diverse resistances in the geometrical model when M = 2, and (d) prototypical resistive network when M = 2.

Distributions of diverse resistances and prototypical resistive network model concerning RC3: (a) Distribution of diverse resistances in the geometrical model when M = 3, (b) prototypical resistive network when M = 3, (c) distribution of diverse resistances in the geometrical model when M ⩾ 4, and (d) prototypical resistive network when M ⩾ 4.
Therefore, in this article, under applying the voltage to both ends of the course direction, the resistance network model can be rearranged based on the distribution of conductive loops along the course direction. As embodied in Figure 6, after exchanging the two semi-wales named P1 and P2 in Figure 6(a), a new simplified sensor structure illustrated in Figure 6(b) is obtained. The two semi-wales at the course ends are combined to form a conductive wale without RC1 (referred to as the N-RC1-wale, Figure 6(c)), and the rest part of the sensor is repeated N − 1 times by another conductive wale with RC1 (referred to as the RC1-wale, Figure 6(d)) along the course direction. Therefore, the rearranged sensor’s voltage distribution conforms to equation (2), where U1 and U2 are applied to the N-RC1-wale and RC1-wale, respectively

According to Ohm’s law, 28 the relationship between the total resistance and each series resistance can be deduced as

where NCRst (M_N) represents the total equivalent resistance of the sensor with M courses and N wales, NCRst (M_1) indicates the equivalent resistance of the sensor with M courses and one wale which refers to the N-RC1-wale, and NCRstt (M_1) is the equivalent resistance of the sensor’s repeat area which refers to the RC1-wale.
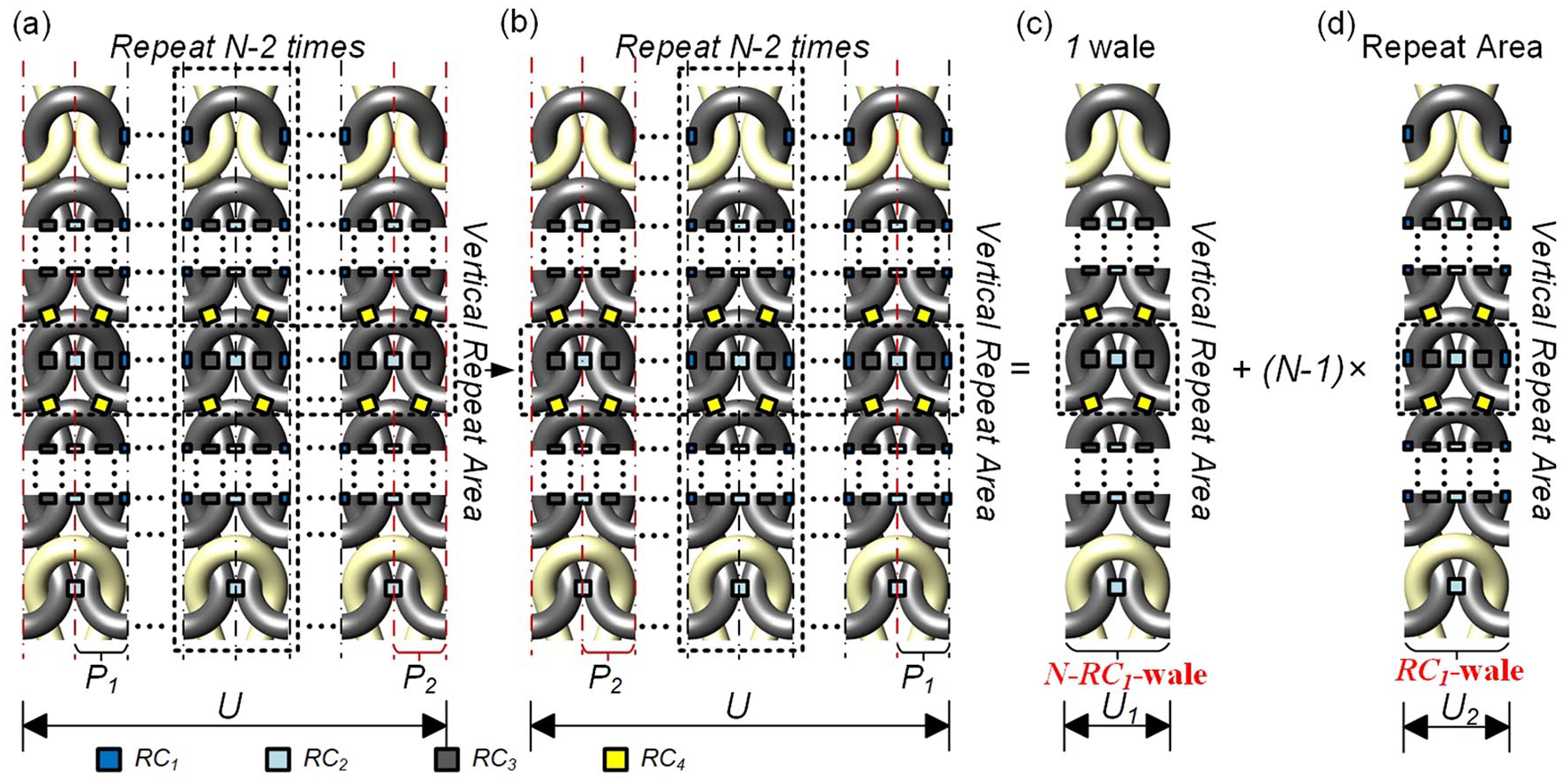
Simplifying the weft-knitted sensor’s geometrical model when voltage is applied to both ends of the course direction: (a) The initial structure marked with resistances, (b) the final structure after exchanging P1 and P2 in (a), (c) the N-RC1-wale composed of the two semi-wales at the course ends in (a), and (d) the RC1-wale meaning the repeat area along the course direction in (a).
By Supplementary Theoretical Calculation 1, the final equivalent resistive circuits of NCRst (M_1) and NCRstt (M_1) with different M and their corresponding equations can be summarized in Figure 7, where the symbol “//” indicates the parallel of resistances. During the calculation, a series of equivalent transformations (Supplemental Figures S1–S6), such as evenly dividing the contact resistors into the branches connected to themselves,16,21,22 splitting the nodes on the symmetry line, the merge of equipotential points, the Y − Δ transformations, 28 the nodal analysis, 28 the series-parallel rule of resistance, 28 and removing the bridge resistors in the generalized Wheatstone bridge, 16 were used. So far, the theoretical calculation of NCRst (M_N) with different M and N can be summarized as shown in equation S20 in Supplemental Material.
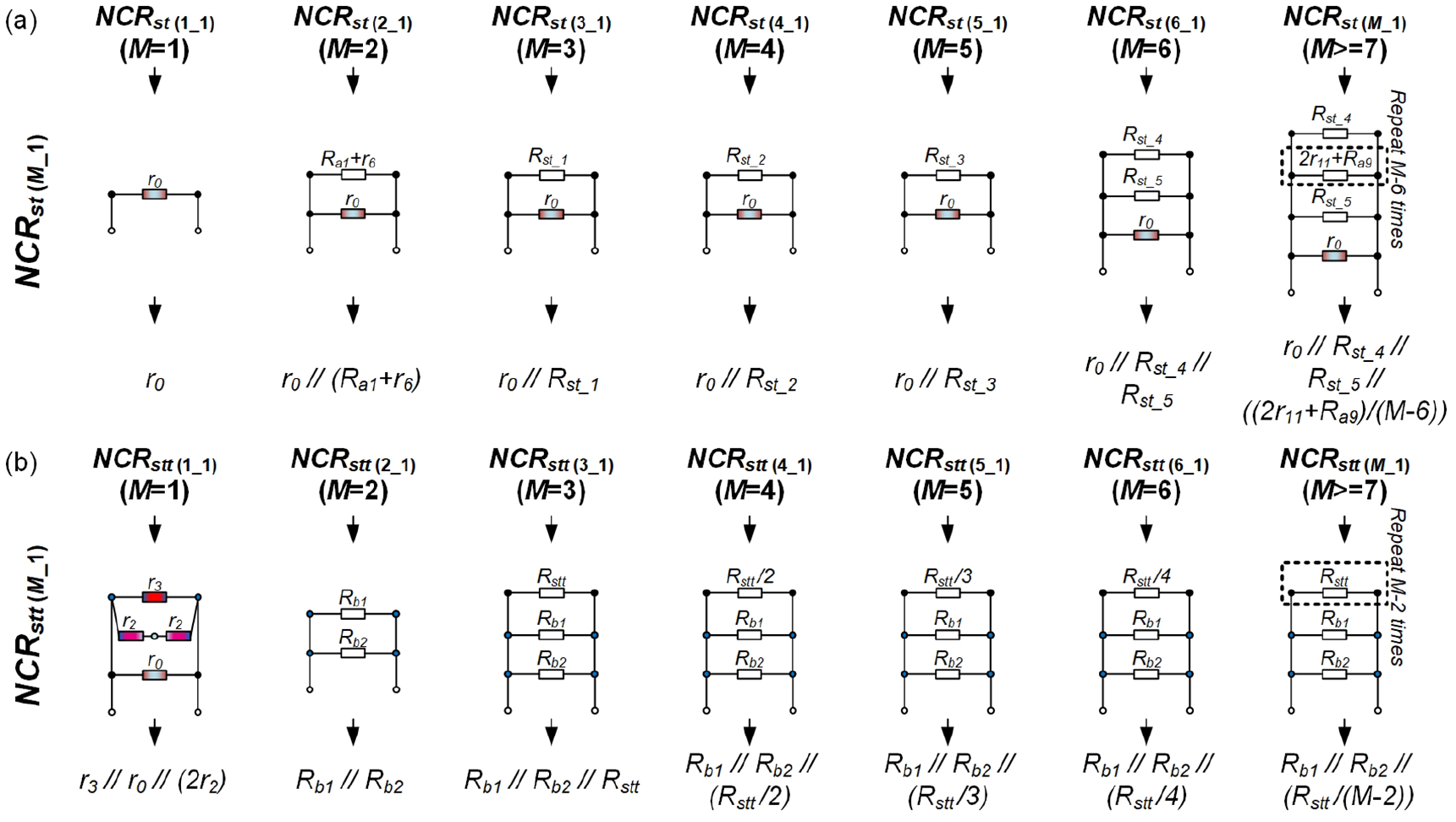
Final equivalent resistive circuits of NCRst (M_1) and NCRstt (M_1) with different M and their corresponding formulas: (a) Circuits and formulas of NCRst (M_1) with different M and (b) circuits and formulas of NCRstt (M_1) with different M.
Resistive network model with RC1, RC2, and RC4
The resistive network model with RC1, RC2, and RC4 is only considering the jamming contact resistance. Here, the total equivalent resistance of the sensing area with M courses and N wales is named as CRst (M_N), and the equivalent resistances of N-RC1-wale and RC1-wale are labeled as CRst (M_1) and CRstt (M_1), respectively. Then, as shown in Figure 6, the relationship between the total resistance and each series resistance can be described as

It should be noted that in this resistive model, the conductive courses can only be connected by the point of RC4 that exists between the courses separated by one course. For example, the needle loops in the first course are in contact with the sinker loops in the third course from bottom to top, as shown in Figure 3. Then, the total resistive network is divided into two sub-resistive networks in parallel, as illustrated in Figure 8(a); the odd-numbered courses (connected by red lines) form one and the even-numbered courses (connected by blue lines) constitute another one. At the same time, J1 and J2 are assumed to be the respective total number of odd-numbered and even-numbered courses while J1 and J2 depend on M. J1 and J2 are uniformly represented by J because that each sub-resistive network varies with the number of internal courses in the same pattern. Herein, the relationships among J1, J2, J, and M can be deduced as shown in equation (5). It can get that the values of J1 and J2 are different, with a difference of one when M is odd and are the same when M is even. Figure 8(b)–(d) displays the prototypical sub-resistive networks with J courses. In addition, CRJst (J_1) and CRJstt (J_1) are used to signify the equivalent resistances of N-RC1-wale and RC1-wale separately in the sub-resistive network in the following

Hence, the key steps to solve CRst (M_N) in this part are as follows:
To determine the values of J, J1, J2 under the given M;
To obtain CRJst (J_1) and CRJstt (J_1) according to the equivalent circuits of the sub-resistance network after various transformations under the expected J;
To find out CRst (M_1) and CRstt (M_1) according to the parallel relationship of the sub-network.

Prototypical sub-resistive networks of the weft-knitted sensor without RC3 with different conductive loop courses J: (a) The relationship among the conductive course number of the entire resistive network M, the total number of odd-numbered courses J1, and the total number of even-numbered courses J2, (b) prototypical sub-resistive network when J = 2, (c) prototypical sub-resistive network when J = 3, and (d) prototypical sub-resistive network when J ⩾ 4.
Following these crucial steps, CRst (M_1) and CRstt (M_1) with the specific M can be solved by Supplementary Theoretical Calculation 2. Some equivalent transformations (Supplemental Figures S1 and S7–S9) are used, for example, evenly dividing the contact resistances into connected branches,16,21,22 splitting nodes on the symmetry line, merging and rearranging the equipotential points, and using the series-parallel rule. Moreover, the final equivalent resistive circuits of CRst (M_1) and CRstt (M_1) with different M and their corresponding equations can be concluded in Figure 9, revealing the relationships between CRst (M_1) and CRJst (J_1), CRstt (M_1) and CRJstt (J_1). So far, the theoretical calculation of CRst (M_N) with different M and N can be deduced as shown in equation S42 in Supplemental Material.

Final equivalent resistive circuits of CRst (M_1) and CRstt (M_1) with different M and their corresponding formulas: (a) Circuits and formulas of CRst (M_1) with different M and (b) circuits and formulas of CRstt (M_1) with different M.
Experiment and model calculation
Materials, sample preparation, and testing set
111dtex silver-plated nylon filament as the conductive yarn was used as the face yarn in the sensing area, with resistivity ρ and diameter d of 571.5 Ω/m and 0.1596×10-3 m, respectively. In contrast, 86dtex low-elastic nylon yarn as the normal insulated yarn was used as the face yarn in the non-sensing area, and the same ground yarns in the two areas are 44dtex/33dtex nylon/spandex covered yarn. All strain sensors were prepared on SANTONI SM8 TOP2 MP seamless knitting machine with gauge 28 under the same process parameters. The four-wire method accomplished by a digital multimeter was introduced (see Figure 10) to test the resistance of the sensor.

The four-wire resistance measurement for measuring the resistance of the prepared samples using a digital multimeter.
Sample specification design and experimental data
The numbers of course and wale in the sensing area are significant parameters affecting the resistance and properties of the knitted strain sensor, so two groups of sensor samples were designed to verify the resistive network models freshly made. In the first group of samples, the course number is from 1 to 10, while the wale number is from 1 to 10, respectively, as illustrated in Table 1, where each listed resistance is the average value of three same samples. The numbers of course and wale for the second group of samples are displayed in Table 2, where the method of obtaining the resistance values is the same as the first group. Rst (M_N) stands for the experimental resistance data of the strain sensors in the following.
Rst (M_N) of the first group of strain sensors with different courses and wales.

Rst (M_N) of the second group of strain sensors with different courses and wales.

Calculations of the two resistive network models
The critical task is solving the diverse length-related and contact resistances, as depicted in Supplementary Model Calculation. First, based on Peirce’s two-dimensional geometric model of the plain stitch with symmetric the needle loop and the sinker loop, 26 as shown in Supplemental Figure S10, the length-related resistances can be achieved as shown in equation (6). The contact resistances can be calculated as shown in equation (7), using the experimental data in Table 1 and the concerning equations in Supplementary Theoretical Calculation 1.
Finally, equations (8)–(9), including all resistances of these two resistive network models, are obtained by using the MATLAB symbolic operation in combination with the relevant formulas in Supplementary Theoretical Calculation 1 and Supplementary Theoretical Calculation 2




Results and discussion
Relationship between the equivalent resistance and N
For Table 1, fixing M (the course number of conductive loops), respectively, a set of linear fitting processing between Rst (M_N) (the experimental resistance value) and N (the wale number of conductive loops) were performed. As shown in Figure 11, the linear fitting curves are highly consistent with the experimental values. The slope and intercept values of the linear formulas can be viewed from Table 3, where Rfst (M_N) is the linear fitting resistance equation based on the tested resistance data from the first group of samples, and the subscript M and N are dependent integer variables. The statistics (R2) here, implying the goodness of fit, is very close to 1, further demonstrating the high consistency of the linear fitting and the experimental values and verifying the correctness of the initial simplification about the resistive network (see Figure 4).

Fixing the number of conductive courses M, the linear fitting between the experimental resistance value Rst (M_N) and the number of conductive wales N of the first group of samples: (a) Raw figure of the fitting result and (b, c) the enlarged figures of the corresponding parts in (a), respectively.
The linear fitting data of the first group of samples.
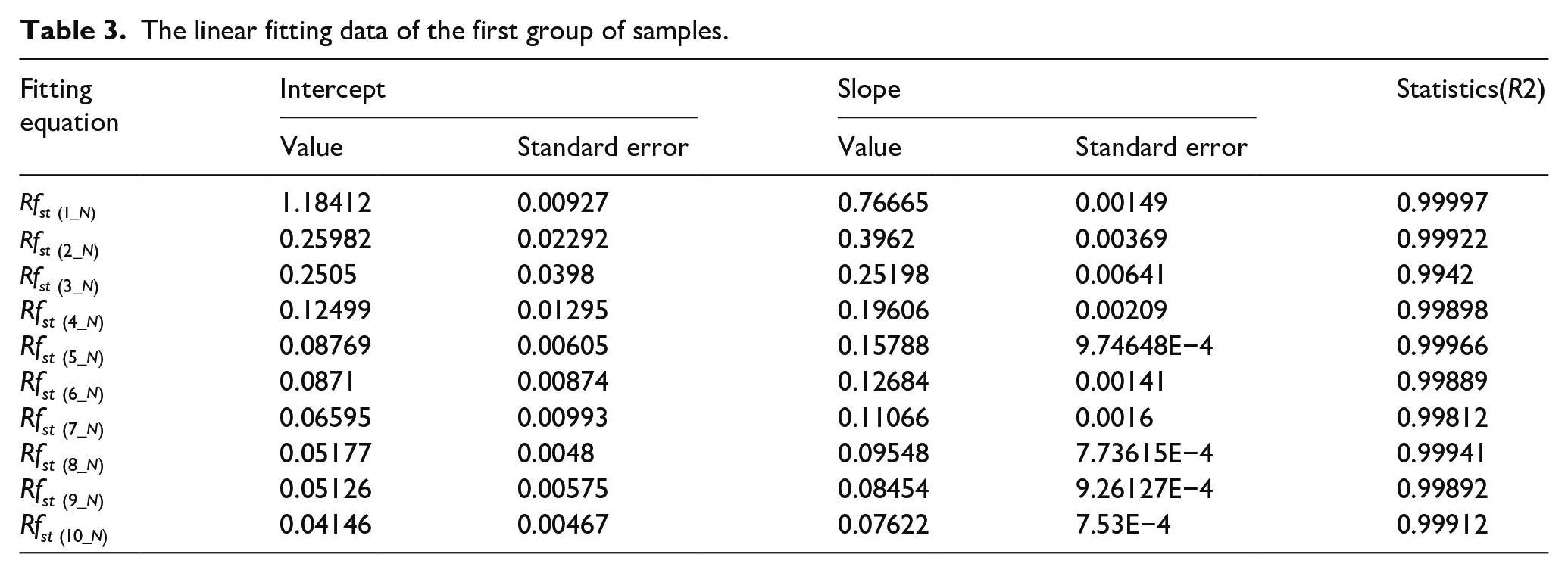
Figure 11 displays that when the voltage is applied to both ends of the course direction, Rst (M_N) is proportional to N under fixing M. The slope and intercept values decrease at a slowing down rate as M increases (can be seen in Table 3).
The slope and intercept values from equations (8)–(9) compared with the linear fitting results in Table 3 are listed in Table 4. It can be seen that the calculated equation of NCRst (M_N) with RC3 is closer to the fitting equation Rfst (M_N) than the CRst (M_N) without RC3, which implies that RC3 exists in the real prepared sensors. The main reason for the existence of RC3 is the difference in elasticity between the conductive face yarn and the elastic ground yarn in the sensing area, as well as the input tension control of the ground yarn during knitting. Then, the ground yarn at the interlocking position has deviated from the ideal position, which creates a contact space for the conductive face yarn generating RC3.
The linear fitting and calculating data from the first group of samples.

The differences in the slope and intercept values of the fitting and calculating results in Table 4 are shown as below:
When M = 1, the intercept and the slope values of CRst (1_N) are equal to those of NCRst (1_N);
When M = 2, the intercept and slope values of CRst (2_N) are half of those of CRst (1_N) due to the model. The intercept value of CRst (2_N) is more than twice of that of NCRst (2_N), while the slope value of CRst (2_N) is lightly smaller to that of NCRst (2_N);
When M = 3, the differences in the intercept and slope value of CRst (3_N) and NCRst (3_N) become smaller, and the intercept value of CRst (3_N) is slightly smaller to that of NCRst (3_N), while the slope value of CRst (3_N) goes negligibly higher than that of NCRst (3_N);
When M = 4, the intercept and slope values of CRst (4_N) become faintly higher than those of CRst (4_N);
When M ⩾ 5, the intercept values of CRst (M_N) keep slightly smaller than those of NCRst (M_N), while the slope values of CRst (M_N) remain slightly higher than those of NCRst (M_N) which also can be deduced by equations (8)–(9).
Relationship between the equivalent resistance and M
The resistances NCRst (M_N) and CRst (M_N) of the two models with the specific integer M and N were calculated, respectively, by equations (8)–(9). Fixing N, respectively, analysis of Rst (M_N), CRst (M_N), and NCRst (M_N) was performed by plotting data where the integer M changes from 1 to 10, as shown in Figure 12. It is found that Rst (M_N), CRst (M_N), and NCRst (M_N) decrease at a reducing rate as M increases. In addition, Figure 12(b)–(e) is the enlarged view of some parts of data curves in Figure 12(a) to explicit the curves. It can be gotten that when M ⩾ 5, CRst (M_N) is always higher than NCRst (M_N), and the difference gradually increases as the increase of N. Also, NCRst (M_N) is closer to the experimental value Rst (M_N) than CRst (M_N).

Fixing the number of conductive wales N, the comparison of the experimental and calculated data of the first group of samples: (a) Raw plots of the experimental data and calculated data and (b–e) enlarged views of the corresponding parts in (a), respectively.
To further verify the correctness of the model, Table 2 was analyzed by the data curves of Rst (M_N), CRst (M_N), and NCRst (M_N), where N equals 50, 100, and 150, respectively, as depicted in Figure 13. Similarly, CRst (M_N) is always higher than NCRst (M_N) for specific M and N, and the difference gradually grows as the increase of N and decreases as the increase of M.

Fixing the number of conductive wales N, the comparison of the experimental and calculated data of the second group of samples: (a) Plots of the experimental data and calculated data when M equals from 5 to 35 with the interval of 5 and (b) plots of the experimental data and calculated data when M equals to other values.
Comparison of the two established resistive network models
Finally, to compare the two established models, three-dimensional surface plots of the calculated resistances, NCRst (M_N) and CRst (M_N), were made according to equations (8)–(9). Here M is from 7 to 500, and N is from 1 to 500, as displayed in Figure 14 containing the projections on the coordinate planes (Figure 14(b)–(d) and (f)–(h)). For the two models, the various forms of the calculated resistances with M and N are the same as those in Figure 13. The resistances decrease non-linearly as the increase of M (see projections on the x-z plane in Figure 14(b) and (f)) and increase linearly as the increase of N (see projections on the y-z plane in Figure 14(c) and (g)). The color bars (see Figure 14(d) and (h)) illustrate that the value range of CRst (M_N) is slightly more extensive than that of NCRst (M_N). The projections on the x-y plane in Figure 14(d) and (h) indicate that the difference between CRst (M_N) and NCRst (M_N) becomes slightly small as the increase of M where the resistance value approaches zero.

When M ⩾ 7, N ⩾ 1, the three-dimensional surface plots of the resistance, M and N of the two models and their projections on each plane: (a) Three-dimensional surface plots of the resistive network model with RC3 and the corresponding projections (b–d) and (e) three-dimensional surface plots of the resistive network model without RC3 and the corresponding projections (f–h).
Conclusion
In the present study, two resistive network models of the weft-knitted strain sensor with the plating stitch have been established accordingly. The first model was based on the jamming and interlocking contact resistances, while the second one only focused on the jamming contact resistances, which can improve the existing static relaxation resistive network models.12,13,16,17 In the case of applying voltage along the two ends of the course, the theoretical resistance calculation of the corresponding model was performed through using a series of equivalent transformations to simplify the model to the final easy-to-solve resistive network. It can be found that the two established resistive network models both can be simplified to a series-parallel resistive network connected in series along course direction and parallel along the wale direction, which is consistent with the conclusions of other researchers.16,17
Finally, the correctness and usability of the two models were verified by experiments and calculations based on the models. It can be concluded that both models can predict the change law of the equivalent resistance with the number of conductive courses and wales, that is, the equivalent resistance increases with the number of wales and decreases with the number of courses, which coincides with the discoveries of other investigators.16,18
In addition, the calculating resistances of the first model are closer to the experimental data and smaller than those of the second model. Moreover, the difference will become smaller as the number of courses increases, which reflects that the jamming contact resistance has a more considerable influence on the resistive network than the interlocking contact resistance. Furthermore, the two established resistive network models can be further used to analyze the effect of different contact and length-related resistances on the total equivalent resistance by numerical analysis.
Admittedly, because it is challenging to calculate the contact resistances in building the models theoretically, the determining of the contact resistances in verifying the model depends on the experiment. Moreover, this article only investigates the resistance network model of the knitted strain sensor under static relaxation. However, when the sensor works, the corresponding resistance network dynamically changes, so the next article in this series will deal with the resistance network model under the elongation along course direction.
Supplemental Material
Figure_S1 – Supplemental material for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation
Supplemental material, Figure_S1 for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation by Yujing Zhang and Hairu Long in Journal of Engineered Fibers and Fabrics
Supplemental Material
Figure_S10 – Supplemental material for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation
Supplemental material, Figure_S10 for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation by Yujing Zhang and Hairu Long in Journal of Engineered Fibers and Fabrics
Supplemental Material
Figure_S2 – Supplemental material for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation
Supplemental material, Figure_S2 for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation by Yujing Zhang and Hairu Long in Journal of Engineered Fibers and Fabrics
Supplemental Material
Figure_S3 – Supplemental material for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation
Supplemental material, Figure_S3 for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation by Yujing Zhang and Hairu Long in Journal of Engineered Fibers and Fabrics
Supplemental Material
Figure_S4 – Supplemental material for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation
Supplemental material, Figure_S4 for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation by Yujing Zhang and Hairu Long in Journal of Engineered Fibers and Fabrics
Supplemental Material
Figure_S5 – Supplemental material for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation
Supplemental material, Figure_S5 for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation by Yujing Zhang and Hairu Long in Journal of Engineered Fibers and Fabrics
Supplemental Material
Figure_S6 – Supplemental material for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation
Supplemental material, Figure_S6 for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation by Yujing Zhang and Hairu Long in Journal of Engineered Fibers and Fabrics
Supplemental Material
Figure_S7 – Supplemental material for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation
Supplemental material, Figure_S7 for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation by Yujing Zhang and Hairu Long in Journal of Engineered Fibers and Fabrics
Supplemental Material
Figure_S8 – Supplemental material for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation
Supplemental material, Figure_S8 for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation by Yujing Zhang and Hairu Long in Journal of Engineered Fibers and Fabrics
Supplemental Material
Figure_S9 – Supplemental material for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation
Supplemental material, Figure_S9 for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation by Yujing Zhang and Hairu Long in Journal of Engineered Fibers and Fabrics
Supplemental Material
Supplementary_Materials – Supplemental material for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation
Supplemental material, Supplementary_Materials for Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation by Yujing Zhang and Hairu Long in Journal of Engineered Fibers and Fabrics
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.