
Abstract
Reliable network connectivity is one of the major design issues in the context of wireless sensor networks. These networks have diverse communication patterns due to non-uniform sensing activities at various locations in the environment being monitored. In such scenarios, some nodes lying in high-traffic zones may consume more energy and eventually die out resulting in network partitioning. This gives rise to a situation in which alive nodes are trapped in a disconnected cluster, and they do not have enough radio range to communicate their data to the destination (i.e. a sink or a relay node connected to the main part of the network). This phenomenon may deprive a large number of alive nodes of sending their important time-critical data to the sink. In this article, we propose a virtual antenna–based cooperative beamforming approach for retrieving valuable data from these disconnected nodes. In the proposed approach, the sensor nodes in an isolated partition work together to form a directional beam. This directional beam significantly increases their overall communication range to reach out to a distant relay node which is connected to the main part of the network. The proposed approach of cooperative beamforming–based partition connectivity is more effective when a cluster with a favorably large number of nodes gets partitioned. Furthermore, a beamforming-based mechanism is proposed for a disconnected cluster to locate the nearest relay node which is still connected to the sink and to reconnect itself to the main part of the network via the most adjacent relay node for time-critical data transmission. The proposed mechanism is then evaluated through simulation results.
Keywords
Introduction
A wireless sensor network (WSN) consists of a large number of small nodes, deployed in a target area, for various purposes such as monitoring environment, security surveillance, medical diagnoses, and so on. In a WSN, data transmission is achieved through multihop communication, in which the sensor nodes relay their data through neighboring nodes to the sink. Although this method is energy-efficient, it has limitations1–5 as the sensor nodes depend on each other for the routing of their data to the sink. Thus, a single dead node may lead to a significant change in the network topology. Hence, even a cluster of alive nodes may not be able to communicate with the sink and thus get disconnected from the network. 6
As discussed earlier, in a WSN, the nodes sense data from the environment and transmit it to the sink after some processing. These nodes have low-powered batteries, and most of their battery power is consumed in data transmission. The data are forwarded on hop-by-hop basis, that is, every node routes the incoming data to the destination. This whole process consumes energy; therefore, the energy levels of the individual nodes in the network gradually decrease. Due to the non-uniform distribution of communication traffic and sensing activities among different parts of the network, the energy of some nodes may deplete at a higher rate resulting in dead nodes. Such a node may drain all its energy and become unable to process or send data.7–9 The death of relaying nodes present on linking paths between a significant portion of the network and the sink would then cause disconnection of that part from the rest of the network. Thus, nodes in the disconnected partition or cluster are no longer able to send their collected data to the sink. The concept of isolated clusters is shown in Figure 1. Sometimes such a situation deprives a reasonably large number of alive nodes from sending critical collected data to the sink. 10
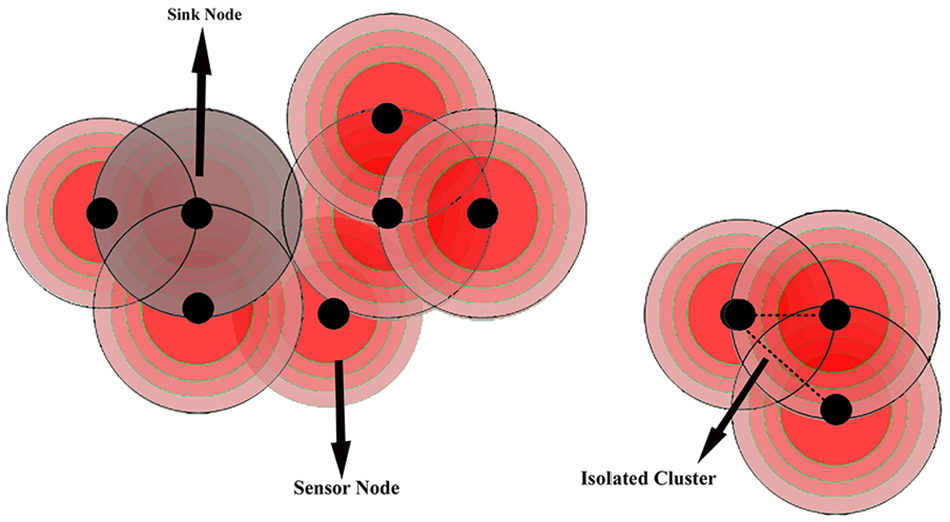
Isolated cluster in wireless sensor network.
To retrieve the collected data from the nodes present in the disconnected, isolated cluster, redeployment on the path linking these nodes with the rest of the network is usually proposed. However, these nodes may lose their data until the redeployment is done, as it is a time-consuming activity. We recommend a timely solution for such a situation to retrieve valuable data from these nodes.
Our method uses a cooperative virtual smart antenna system for cooperative beamforming to increase the effective communication range of the isolated cluster of nodes. We also propose a cooperative beamforming–based scanning mechanism to search for the nearest alive node connected to the main part of the network. Once such a connection is established through beamforming, the time-critical data trapped in the isolated partition/cluster can be transmitted to the main network containing the sink. This approach enhances the reliability and robustness of a WSN designed for critical real-time data applications.
The organization of the remaining article is as follows. In the next section, we discuss the related literature. In the “Overview of the proposed methodology” section, an overview of the proposed methodology, along with the system model, is presented. In the section “Cooperative beamforming,” we discuss collaborative beamforming while its use for reconnection is explained in the section “Reconnection to the network.” The simulation and results are discussed in the “Results and discussion” section. The “Conclusion and future work” section concludes the article.
Related work
In recent years, cooperative communication through beamforming has attracted the attention of a large number of researchers. Many schemes have been proposed for beam formation11–18 and its effective use in energy efficiency,19–24 power optimization, 25 and node localization. 26 However, to the best of our knowledge, the use of cooperative beamforming in the reconnectivity of abandoned general-purpose nodes with no extraordinary smart antenna facility, trapped in a disconnected cluster of a WSN, has not been incorporated so far.
The authors in literature14,16 proposed the idea of cooperative communication through the nodes equipped with the smart antenna. They introduce the methodology of collaborative interaction between nodes to form Multiple-Input and Multiple-Output link for enhancing diversity and data rate of the network. The technique uses the intelligent adaptive antenna system instead of Omnidirectional antennas. The distribution of wireless sensor nodes in an area of interest with their cooperative beamforming is discussed in Ahmed and Vorobyov. 12 The paper investigates the challenges such as the orientation and placement of sensor nodes for their efficient cooperative beamforming. It uses a Gaussian distribution function to model the spatial distribution of sensor nodes. In Ahmed and Vorobyov, 13 the effectiveness of the beam formation has also been studied for different sensor node distribution models. The paper shows that collaborative beamforming provides better performance when sensor nodes’ deployment follows a Gaussian probability density function (PDF) as compared to uniform PDF. The authors in Kavak and Kucuk 17 proposed a method to determine the minimum connectivity probability for a given transmission range concerning any nodes density with varying antenna beam width of a smart antenna system mounted on special-purpose wireless sensor nodes. With this method, they found the minimum number of smart nodes with various beam widths required in a given region. The phase synchronization of the transmitted waves over time-varying channels has been discussed in Thibault et al. 18 The authors propose a method which uses continuous feedback from the receiver to optimize the phase of transmitting waves to form an effective beam. In Agudo et al., 11 the authors analyze the behavior of cooperative beamforming on different number nodes to several nodes involved and type of antenna installed on sensor nodes. They observe that as the number of nodes involved in beamforming increases, the beamforming becomes more prone to errors, power synchronization is being an issue.
In Haro et al., 20 a convex optimization framework is used for collaborative beamforming to increase the network lifetime and to satisfy a predefined quality of service (QoS). Similarly, in Wong et al., 24 a cooperative beamforming mechanism is investigated for energy-efficient communication. The paper also proposed a mathematical framework for the selection of an appropriate number of nodes, required to perform beamforming. The result shows that with an increase in the number of cooperative nodes, the energy efficiency is improved for cooperative transmission, but more energy would be needed for sensor selection and beamforming. In Feng et al., 21 a scheduling algorithm is proposed for data transmission using beam formation. In this algorithm, the network is divided into clusters, and the nodes perform each round of cooperative transmissions through beamforming via their cluster heads. Thus, the energy consumed on data sharing is reduced and the overall lifetime of the network is improved. The experimental results are presented, which shows that the beam formation achieves more transmissions than direct or multihop communications. A convex optimization framework which optimizes the collaborative and distributed beamforming is presented in Haro et al. 19 This methodology also improves the network lifetime and optimizes battery consumption of the WSN nodes.
In To et al., 25 the node selection for cooperative beamforming is made in coherence with a uniform circular array. The authors suggest that while selecting sensor nodes for cooperative beamforming, the uniformity of the nodes in a circular array should be taken into consideration. The idea of cooperative communication for WSN node localization is presented by Patwari. 26 The authors propose a method to solve the localization issue through collaborative communication among the nodes. The nodes calculate their location. In this method, the nodes share their positions in the transmitting messages, and the receiving node can find its location with the given information. We can categorize partition recovery techniques into three major categories.
Redeployment-based solutions;
Mobility-based solutions;
Adjustable power–based solutions.
Redeployment-based solutions
There are certain strategies to heal the network partitioning through node redeployment.
A partition recovery scheme using centroids is proposed in Kumar and Amgoth. 27 Centroids are used to design a route for relay deployment. A network holes detection and healing solution is proposed in Zhang and Tao 28 through powerful and costly relay nodes. In Rao, 29 the author proposed a sleep scheduling–based energy conservation technique to prevent network partitioning. To conserve energy and prolong network lifetime, this technique uses a tree mechanism. The high-energy nodes are placed as root branch nodes that actively participate in communication while the low-energy nodes are set as leaf nodes and can be put to sleep to conserve energy. In Ding et al., 30 the authors present an anomaly detection system based upon isolation principle. To maintain connectivity and ensure data reliability, they consider the spatial correlation among neighboring sensors to detect node/s isolation. Mansour and Jarray 31 proposed an exact iterative algorithm to solve the connectivity problem. They used combinational optimization in their proposed approach. In Kar et al., 32 the authors targeted a spacial network partitioning scenario. In some cases, due to environmental constraints such as fog, rain, and so on, there is a chance of communication range shrinkage, that is, environmental constraints can reduce sensor communication range which may result in network partitioning. The proposed technique addresses the problem by adjusting the sensor communication range.
Wang and Ding 33 presents a redeployment mechanism by finding out the most vulnerable cluster sets where redeployment will contribute to prolonging the network lifetime. In their proposed technique, they take into account two new parameters which were not directly used in the previous techniques, that is, probability of event occurrence in the cluster and the routing mechanism to be used to propagate those events to sink. The proposed heuristic algorithms use expectation-based prediction approach to solve the redeployment problem. In Otero et al., 34 the response surface methodology with desirability functions has been evaluated for optimization of WSN deployments. The authors used case studies for evaluating their approach. In another work, Ko 35 focuses on the macroscopic aspect of the network and argues that it is better to exhaust individual nodes to achieve a better overall performance of the network. The author proposes two algorithms, one for optimum density distribution and other for convolution. Bhatt and Datta 36 used the Markov process to find out the probability of node redeployment and applied stochastic processes for recovering the holes in the network. In Lee et al. 37 and Wang et al., 38 the authors address the network partitioning problem through additional relay node deployment. In their research, the focus is on finding the optimal number of relay nodes and identifying the suitable location for these additional relay nodes to be placed. similarly, in Virender et al., 39 the partitioning problem is also addressed through efficient redeployment of additional relay nodes using concentric format points. In Zeng et al., 40 two fault-tolerant algorithms were proposed to restore connectivity through additional relay node deployment. The proposed algorithms utilize minimum convex hull to obtain several other nodes to be used along with their respective deployment position to achieve network connectivity. In the above-discussed approaches, static node redeployment was the focus of research, the researchers main focus was to identify three basic parameters: (1) when to redeploy the additional nodes, (2) the number of required sensor nodes, and (3) location calculation for the redeployment of other nodes to overcome the network partitioning. The main drawback of those approaches is that it still required additional resources to heal the network partitioning since redeployment is a time-consuming activity and becomes inappropriate for time-critical data application.
Mobility-based solutions
Contrary to the redeployment-based solution, some researchers investigated node mobility for network restoration. An approach for network partition healing through movable relay node deployment is presented by Jha et al. 61 The proposed solution finds the minimal number of nodes through heuristics. Monte-Carlo Markov Chain (MCMC) solution to determine coverage of WSN is discussed in Chakraborty et al. 41 MCMC is used to determine the probability that WSN with multi-state nodes can efficiently send its sensed data to the mobile sink within a specified time. Deployed node uses random duty cycling method to save energy. A partition healing algorithm based on node repositioning the most optimum nodes in each partition is presented in Baroudi et al. 42 The proposed solution uses fuzzy logic for selecting recovery participant on the basis of residual energy. In Ranga et al., 43 the authors proposed a mobile node–based algorithm. The algorithm used recovery information, stored in each sensor node. This information is updated periodically to recover from network partitioning. A partition detection and recovery approach is presented in Awan et al. 44 Collaborative node movement is used to cover the void region. A reconnectivity approach is proposed in Shriwastav and Ghose 45 using mobile restoration nodes. These restoration nodes are selected from each partition and to heal the network through their movement. A partition recovery scheme using Voronoi polygon centroids is proposed in Fang et al. 46 The authors exploit centroids for finding blind zone in network coverage. Dini et al. 47 proposed a two-phase redeployment technique for the identification of disconnected partition in a sensor field. In the first phase, a partition detection process is performed, and in the second phase, called the confirmation phase, the disconnected region is confirmed. After that, a mechanism for network reconnection is provided through mobile sensor nodes which finds an optimized location for new nodes to be moved to reconnect the network. In Mi et al., 48 the reconnectivity of the isolated segments of a mobile robotic sensor network has been discussed. The authors investigated the obstacles and constraints during the relocation of sensor nodes to complete the broken link among different isolated network segments. Furthermore, they presented an Obstacle-avoiding Connectivity Restoration Strategy for mobile nodes to achieve connectivity. Anna Devi and Manickam 49 present a relocation mechanism for mobile sensor nodes to repair a partitioned network. They discussed the relocation of the mobile node to fill in the void space among separated segments of the network, by taking into account its degree of connectivity with the neighboring nodes. Ma et al. 50 presented a Distributed Connectivity Restoration Strategy to cater to network partitioning, due to the failure of critical nodes located at the cut vertex. They proposed a mechanism to identify appropriate backup node for every critical node in the network to replace the failed node in case of network partitioning. To deal with the dis-connectivity among different segments of a partitioned network, a distributed reverse constrained recovery mechanism was presented in Joshi and Younis. 51 They used mobile sensor node/s to act as relay node/s to recover connectivity. Similarly, in Ma et al., 52 mobility aware spacial sensor nodes called mobile data collectors (MDCs) were proposed to overcome network partitioning. The paper presented an obstacle aware connectivity restoration strategy. This strategy utilizes optimize obstacle avoiding spanning three mechanism to determine the minimal number of MDC nodes needed and their respective position to overcome network partitioning. The authors in Senturk et al. 53 take into account the realistic view of deployment region, that is, terrain variation to determine the optimal path for mobile nodes displacement to cover the void area which causes network partitioning.
Adjustable power–based solutions
Apart from aforementioned approaches, power adjustment is also used in some network recovery solutions. In case of network partition, certain authors propose usage of existing residual energy of any sensor node to accomplish data transmission. A network partition recovery algorithm through adjustable sensing range and mobile relay nodes is presented in Khalifa et al. 54 The authors use both node mobility and power adjustment to transmit data from sensing device to the sink. In Yang et al., 55 deployment of long-distance routing sensor nodes were proposed to overcome connectivity problem among different segments of the WSN. The technique is also evaluated for received signal strength (RSSI) to assure high-quality wireless links for communication. Table 1 gives an overview of some notable solutions. To summarize, the existing methods in the literature, for reconnecting a disconnected network, mostly rely on topological changes in the network, which is both time- and resource-consuming. Therefore, these techniques cannot be used for valuable time-critical data. There is a higher chance of losing important real-time data sensed by the disconnected sensors. Furthermore, the existing techniques cannot be used to form a robust network for reliable sensing in time-critical situations such as security and risking environment monitoring in mining, industry and forest fire prevention, and so on.
Overview of notable partition recovery approaches.

Overview of the proposed methodology
The intensive study of antenna radiation patterns and beamforming mechanisms in the literature gave us the idea to exploit the directed power dissipation property of antennas to achieve a large effective communication range. A collection of nearby nodes equipped with single omnidirectional antennas can effectively increase their communication range by working together cooperatively by combining their transmission power to form a single directed powerful beam. Such a cooperative beamforming technique can be used by the cluster of disconnected nodes to increase the transmission range thereby skipping the dead hops and reaching out for alive relay nodes to communicate with the sink. In our proposed model shown in Figure 4, we assume a dense deployment of the nodes. Also, this solution is suitable for a group of isolated nodes. As it is a collaborative beamforming solution, it is not applicable on single node. Furthermore, results show that the proposed solution is least suitable for the fewer number of isolated nodes.
System model
We considered a static WSN that consists of multiple nodes deployed randomly over an area of interest. The sensor nodes are equipped with GPS and assumed that they are aware of their location and one hope neighbors. They sense their surroundings and forward sensed data to some central repository called a sink or gateway for further processing. Sensor nodes are low-powered vulnerable devices equipped with limited-power batteries and omnidirectional antennas to send and receive signals. All sensor nodes are homogeneous with the same initial energy. Communication between any source node and sink is done in hop-by-hop manner as shown in Figure 2. It is assumed that each node is aware of its neighboring node/s. According to Official US government information about the Global Positioning System, achieving perfect synchronization is a challenging task even with GPS equipped nodes. The commercially available low cost 3.5 m resolution GPS with 1 m error accuracy produces time delay error of 3.33 ns. 56 However, it is still not an ideal situation for optimal phase synchronization. Therefore, high-end hardware is required to achieve the required accuracy for practical implementation. 57 However, as discussed in Mudumbai et al., 58 the phase skew of 30° to 60° will result in 90% to 70% of maximum signal to noise ratio (SNR) which is acceptable for an effective beam. If we use lower ISM (Industrial Scientific and Medical) frequencies having a high period of around 5 ns, it will allow us more flexibility in terms of accuracy. We have assumed around 100 mm location error which results in synchronization error of about 8%–16%, respectively, to achieve acceptable SNR.

Multihop communication in WSN.
Problem formulation
As discussed earlier, the communication pattern in typical WSNs is not uniform. Therefore, some nodes lying on frequently used paths are more critical than the nodes located on such paths which are either not at use or minimally used. As packet transmission consumes energy, if such critical nodes get involved in relaying more data, there is a high probability that these nodes would become dead nodes due to faster depletion of their remaining energy. This leads to the formation of disconnected clusters in the network as shown in Figure 3.

Proposed cooperative beamforming–based partition reconnectivity mechanism.
When such a cut occurs in the network, the data packets sent by the source nodes are stopped at the nodes located on the boundary of the disconnected clusters and no acknowledgment are received at the transmitting nodes. Meanwhile, the sink is unable to receive any information about the data been sent by the nodes in the partitioned cluster. The situation becomes worse when the partitioned cluster contains a large number of sufficiently powered nodes that are unable to connect to the main network individually. This situation mostly arises in large networks where low power nodes have limited communication ranges. To relay crucial data contained/sensed by the nodes in the disconnected cluster to the sink, a communication link is needed. Establishment of this communication link is the main contribution of this research work. We propose a cooperative virtual smart antenna mechanism, in which the nodes present in disconnected cluster collaboratively form a directional beam toward any nearby alive node connected to the main part of the network. This arrangement will enable them to transmit data to the high powered sink which will unicast the acknowledgment of the recipient directly to the source.
In virtual smart antenna system, the transmitters are fitted with single omnidirectional antennas rather than multi-element smart antennas. These single-antenna transmitters work collaboratively to attain the features of a multi-element smart antenna. While working cooperatively, the antenna of each node acts as a smart antenna element. This virtual smart antenna technique can work efficiently in a WSN environment, where the transmitting nodes are deployed closer to each other. They can transmit the data to a distant receiver by using cooperative beamforming, as shown in Figure 3.
Synchronization issues
Despite of promising prospects, collaborating beamforming have many problems and challenges, such as phase and frequency synchronization. To achieve a fine grand beam toward the intended receiver, synchronization among collaborating nodes is very important. In literature where different synchronization schemes have been proposed, some of the major issues or problems are as follows:
Convergence time: Fast convergence time is very much desirable in collaborating beam forming. In feedback methods, the extra communication overhead and gradual adjustment according to the intended receiver introduces unwanted delays.
Energy power consumption: The communication overhead among collaborating nodes to achieve synchronization can result into extra energy consumption and result into fast energy depletion problem in limited energy sensor nodes.
Scalability: The number of nodes taking part into synchronization can affect the synchronization process, large number of collaborating node with rich feedback can increase signaling overhead significantly, causing latency problem in real time.
Channel impairments: Channel state information is an important aspect to ensure synchronization precision. Channel impairments such as noise, path loss, and shadowing fading can effect the synchronization and introduce gradual synchronization error in collaborating nodes.
Node location/orientation: Node position awareness among the collaborating nodes is also very important. To achieve synchronization, orientation of collaborating nodes plays an important role in collaborative beamforming. Location errors can result into side lob maximization problem.59,60
The proposed methodology consists of three main steps: (1) Partition Detection, (2) Beamforming, and (3) Reconnection as depicted in Figure 3. As highlighted in the previous sections, this article focused on using beamforming techniques to reconnect disconnected cluster for transmitting critical real-time data. The use of beamforming in partition reconnection is discussed in the next section which is followed by the details of connection establishment and data transfer mechanism in the section “Reconnection to the network.”
Cooperative beamforming
As mentioned earlier, a network would be said partitioned whenever the packets sent by the source are accumulated at a specific node on the path from the source to sink, and the said node is not able to get further acknowledgements from its receiving relay node ahead of it on the path toward the sink (Figure 4). Such node would then initialize cooperative beamforming procedure with the co-ordination of its neighboring nodes. A node that initiates beamforming would be considered as the reference node, and its distance to the prospective receiving relay node would be taken as the x-axis of the frame of reference. To form a directional beam, the transmitted waves of the transmitting nodes should be received in-phase at the receiver for their constructive summation. Nevertheless, the nodes of isolated cluster deployed in two-dimensional planar area are not in an array form, and they do not have equal spacing among themselves. As an example, a disconnected cluster of three nodes N1, N2, and N3 is shown in Figure 5. These nodes aim to send their data to a receiving relay node R.

Overview of proposed solution.

Working of the proposed cooperative beamforming mechanism.
Since three of the transmitting nodes know their physical locations, they will easily arrange their phase adjustment according to their positions in order to form a cooperative beam toward any prospective receiver R. If these nodes start transmitting the same signal without phase adjustment, out of phase versions of these signals would be received at the receiver which would cause destructive interference. The obvious cause of this harmful interference is the path difference of the waves transmitted by the nodes located at different physical locations. However, if the to-be-transmitted waves are preprocessed at two nodes in accordance with the reference node before their transmission toward the receiver, the corresponding destructive interference can be converted into an in-phase summation resulting into an enhanced power at the receiver. Let
As the exact location of R is unknown, the reference node N1 will have to visualize its location with the assumption that it may lie anywhere around it at a distance

where

Direction of the unknown receiving node from the reference node N1 is also crucial for directive beamforming. In the next section, we will present a detailed note on finding the direction of the receiving relay node and getting connected to it for data transmission. At the moment, we assume that R resides at any arbitrary direction from N1. As already discussed, the separation


where

From the geometry shown in Figure 5,


In general,

This distance disagreement

where

Single node radiation pattern versus collaborative beamforming.
Reconnection to the network
After forming cooperative beam, the nodes in the disconnected cluster would still not be able to connect to the main part of the network, if they do not know the direction in which the nearest relay node (already connected to the main part) resides. We present the following mechanism to address this problem.
When the nodes of the disconnected cluster become able to generate an intense beam which covers a longer distance, they start scanning the whole area around them for the possible existence of an alive relay node which may connect them to the main part of the network. The sequence of steps needed to perform this function is shown in Algorithm 1. In this algorithm, the reference or source node in the disconnected cluster transmits beacon messages in narrow beams in all directions (in a clockwise or anticlockwise manner). The beacon message contains two types of information; one that the beamforming flag is enabled and the second is about the time slot at which the beam is formed in the respective direction. The flag will tell the receiving node about the particular circumstances of partitioning due to which the message has been generated through cooperative beamforming.
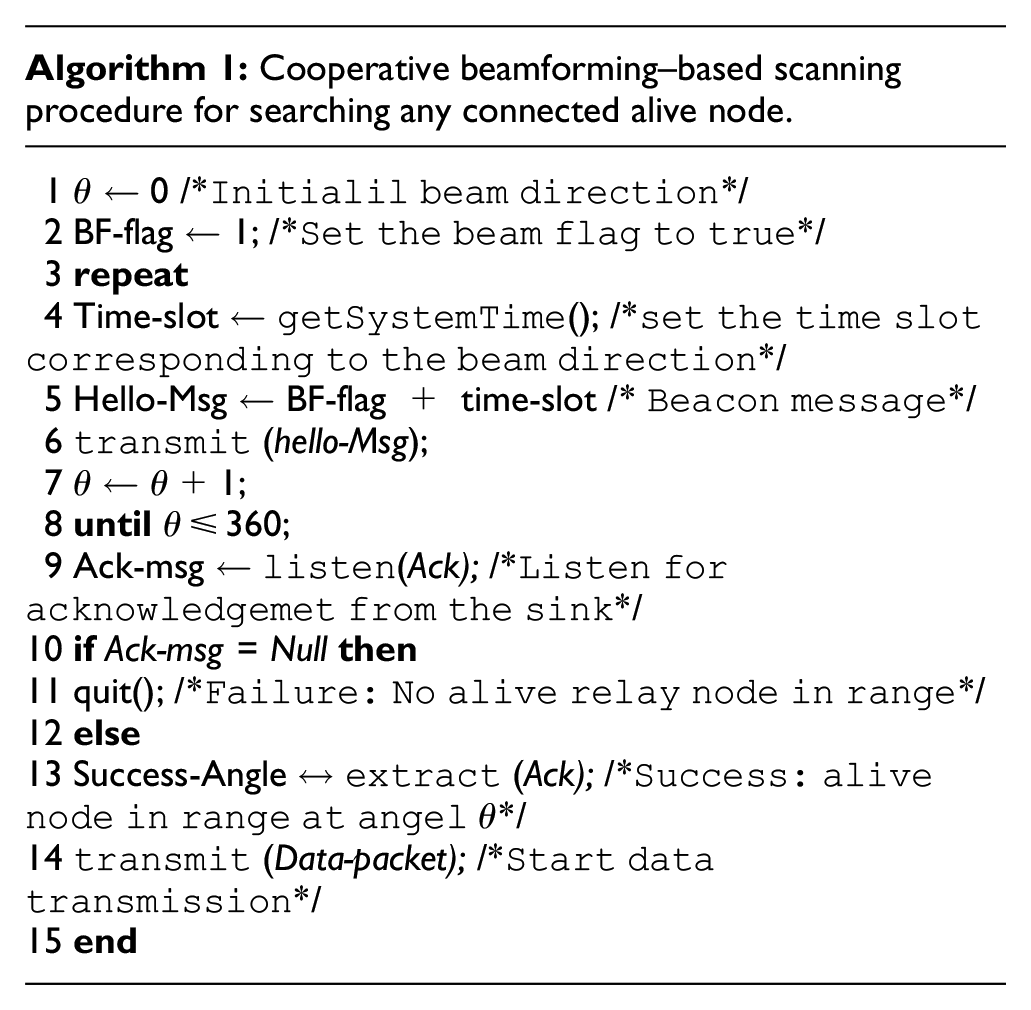
If any relay node connected to the main network receives any of these beams containing specific information (BF-flag), it will measure the RSSI. The RSSI is transmitted to sink along with the received message.
The procedure followed by the sink on the successful reception of the message generated through cooperative beamforming is explained in Algorithm 2 as the sink may receive many messages arriving via multiple relay nodes with different beam power–level information (RSSI). It selects the node with the highest RSSI as a valid relaying agent for communication with the disconnected cluster. The time slot information (time-slot) contained in the beacon message having highest RSSI will identify the successful beam direction at the source node. The sink will acknowledge the receipt of the highest RSSI beacon message by sending acknowledgment directly to the disconnected cluster along with the time slot (time-slot). The time slot will help the group to set the respective direction corresponding to the strong beam as the correct direction for future communication. The reference node in the group, also working as the cluster head, asks the other nodes participating in the cooperative beamforming mechanism to lock their phase adjustment for the auspicious time slot for future communication with the central part of the network. The sink may receive the cooperative beam directly without getting hopped by any relay node. However, the same procedure of acknowledgment will be followed.

Upon successful completion of this process, the isolated cluster will be able to send the important time-critical packets accumulated at different reference nodes to the sink.
Results and discussion
The proposed scheme is evaluated for received power enhancement to ensure network connectivity by partition healing using cooperative beamforming. Several simulation using MATLAB 10 has been performed, such that each simulation is run for 10 times. The data points were taken as an average of 10 simulation runs to ensure the result precision. The simulation is run over sensor nodes distributed uniformly over an area that varies from 500 × 500 to 4000 × 4000 m2 keeping the number of nodes and their communication range constant. This enables us to analyze the performance of the proposed scheme at different node densities. For better understanding beside detail experiment setup, we present a sample experimental setup of the simulation field of 100 m2 comprising of 50 sensor nodes.
The initial deployment is random, and each node has a constant communication range but varying data rate, as shown in Table 2.
Nodes data rate.

The change in topologies with variable data rate leads to network partitioning due to the dead node labeled 39 as shown in Figure 7. The elimination of the node 39 causes the cluster of nodes 4, 15, and 40 to partition and disconnect from the central part of the network. A cooperative beamforming mechanism is thus executed which results in the generation of high power beam as shown in Figure 8.
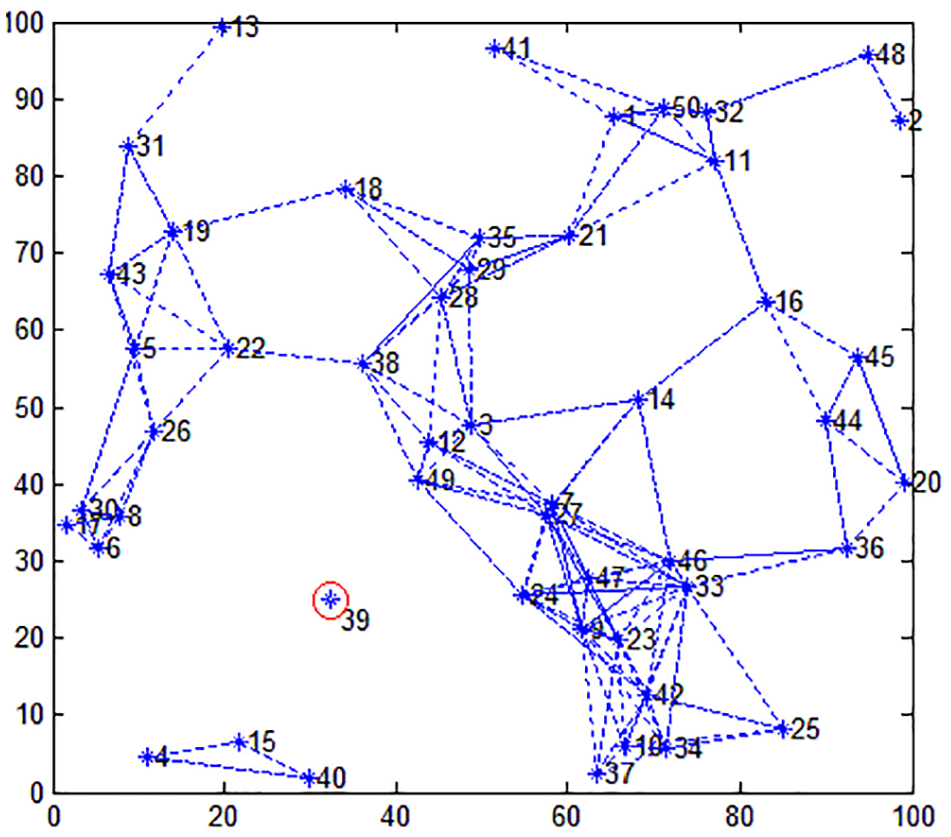
The wireless sensor network with disconnected partition.

Connecting the isolated cluster through proposed cooperative beamforming mechanism.
Figure 9 depicts the cooperative power analysis of the scenarios, when beamforming is available or not available in term of the distance between the transmitter/s and the relay node. The result shows an exponential decrease in received power of the signals transmitted individually by node 15 with increasing distance, and eventually, these signals become undetectable at the closest relay node numbered 49. However, cooperative beam formed with the collaborative effort of all three nodes in the disconnected cluster becomes able to reach the relay node and thus resume the communication.
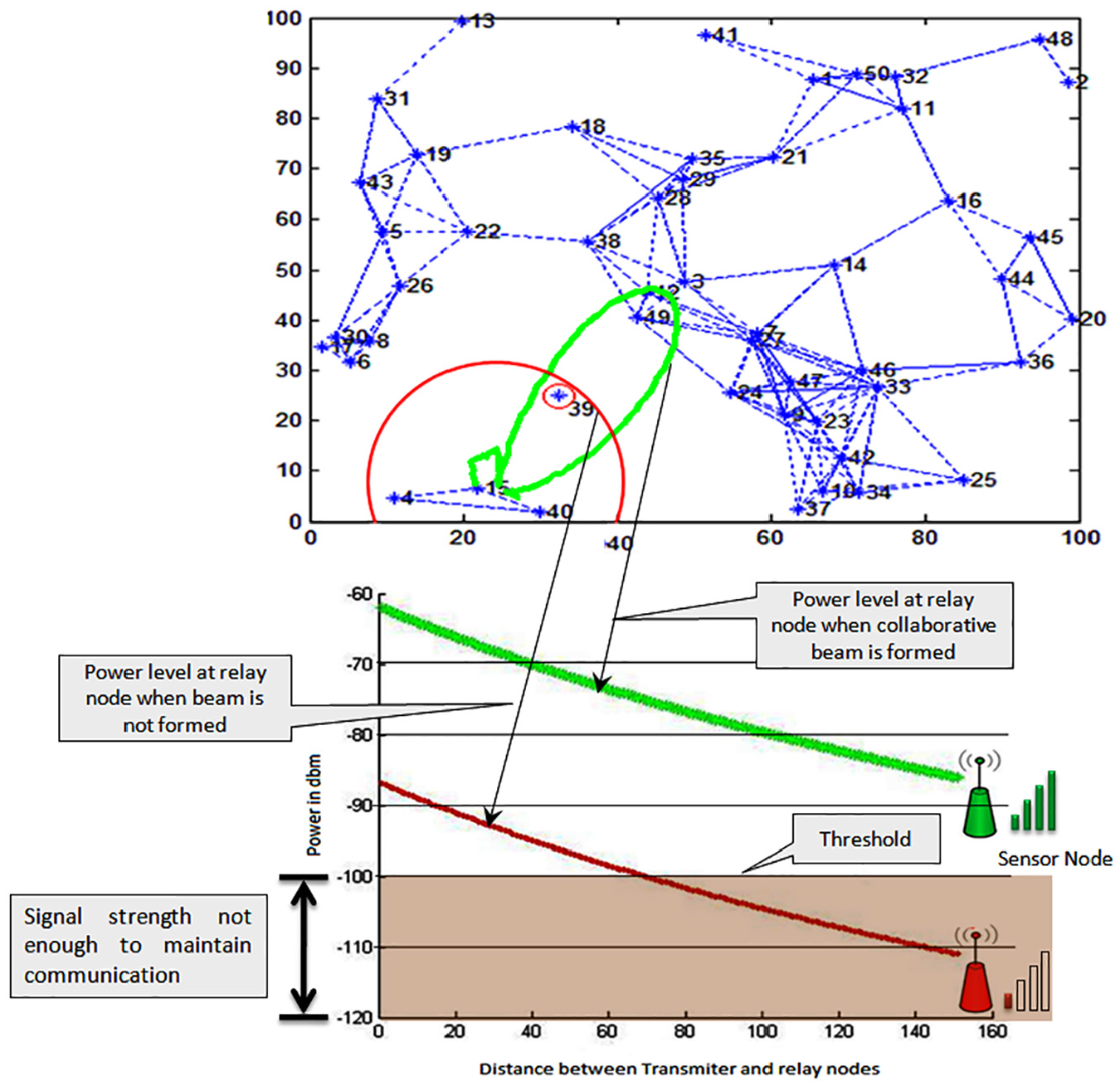
Power analysis of the cooperative beamforming as compared to individual node transmission in the disconnected cluster.
For detailed evaluation, we took a comprehensive simulation setup comprising 300 nodes with varying simulation area as mentioned in Table 3.
Simulation parameters for comprehensive setup.

The results are obtained with varying node density to achieve a different degree of partitioning. We execute our scheme of partition healing if a reference node (the one that initiates beamforming) has more than one neighbors. A significant reduction in the number of disconnected, isolated partitions can be observed in Figure 10 as an average of 10 round each. We can observe the number of disconnected partitions with and without using the beamforming approach. At the simulation area between 2000 and 2500 m2, the difference between the curve is quite significant. This means that beamforming mechanism was successful enough to heal a good number of partitions (works better with large size partitions). This is because the efficiency of our proposed approach relies on the number of participating nodes in cooperative beamforming. Similarly, as we increase the simulation area, the difference between the curves decreases and they appear to converge. This is because the average node density tends to reduce with increase in simulation area resulting in single node partitions which our technique is not able to handle. Figure 11 shows a percentage improvement in partition healing. The curve shows that we can achieve up to 70% reduction in network partitioning if isolated partitions have a sufficient number of nodes to participate in cooperative beamforming. Figure 12 describes the network efficiency in terms of number of successful packet received. This indicates that the network remains stable for a longer period of time. Therefore maintaining high network connectivity, we can achieve greater throughput and avoid critical data loss.

Partition development/creation with and without using beamforming.

Percentage reduction through beamforming as healing.

Packet delivery ratio, with and without beamforming.
Conclusion and future work
In this article, we have proposed a cooperative beamforming–based approach for retrieval of valuable and time-critical data from the nodes trapped in the disconnected cluster of a WSN. In the proposed scheme, the sensor nodes in isolated partitions work together to form a directional beam which significantly increases their overall communication range to reach out to a distant relay node connected to the main part of the network. Furthermore, a mechanism has been developed that enables a disconnected cluster to form cooperative beam and locate the nearest relay node for its reconnection to the main part of the network. This method provides an emergency mechanism for enabling vital data communication before a proper redeployment restores the network. In addition, the use of this mechanism enhances the robustness and fault-tolerance of the network without requiring any additional nodes. Thus, it enables a WSN to minimize critical data loss in case of network partitioning and provides a robust solution for data critical wireless applications. Although, we run number of simulation to take results much closer to real sensor. However, implementing the proposed scheme on real sensor in a practical scenario is really interesting. In future, we will improve the technique through optimizing the solution and will deploy it on real sensors. We will also discuss some really interesting use-cases related to our current work in future.
Footnotes
Handling Editor: Peio Lopez Iturri
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.