
Abstract
In underwater wireless sensor networks, sensor position information has important value in network protocols and collaborative detection. However, many challenges were introduced in positioning sensor nodes due to the complexity of the underwater environment. Aiming at the problem of the stratification effect of underwater acoustic waves, the long propagation delay of messages, as well as the mobility of sensor nodes, a mobile target localization scheme for underwater wireless sensor network is proposed based on iterative tracing. Four modules are established in the mobile target localization based on iterative tracing: the data collection and rough position estimation, the estimation and compensation of propagation delay, the node localization, and the iteration. The deviation of distance estimation due to the assumption that acoustic waves propagate along straight lines in an underwater environment is compensated by the mobile target localization based on iterative tracing, and weighted least squares estimation method is used to perform linear regression. Moreover, an interacting multiple model algorithm is put forward to reduce the positioning error caused by the mobility of sensor nodes, and the two services of node time synchronization and localization assist each other during the iteration to improve the accuracy of both parties. The simulation results show that the proposed scheme can achieve higher localization accuracy than the similar schemes, and the positioning errors caused by the above three problems can be reduced effectively.
Keywords
Introduction
In recent years, the theoretical research and application of underwater wireless sensor network (UWSN) technology have been widely concerned due to the continuous improvement of the application value of UWSNs in the fields of marine resource development and utilization, marine environment monitoring, and geological disaster prediction. Electromagnetic waves, however, have a relatively high absorption loss rate under water, which makes the propagation distance of electromagnetic waves in water become relatively short, so as to make the localization using the Global Positioning System (GPS) and radar with electromagnetic waves directly as signal carriers impossible. The acoustic waves have become important carriers in underwater acoustic channel due to the excellent propagation characteristics in water.
Time synchronization and node localization1–5 services related closely relying on most UWSNs applications, and the former one is regarded as the precondition of the latter. In the process of sensor node localization, the undetermined nodes broadcast localization requirements to its surrounding reference nodes, which then broadcast messages with position information and transmission time after receiving such requests. The propagation delay of message will be calculated by the undetermined nodes to estimate the distances between the reference nodes and it. The clock synchronization between sensor nodes is required in this localization method, obviously.
However, there are still some problems to be solved in the practical application and research of time synchronization and node localization. First of all, time difference of arrival (TDOA) measurements are relied on underwater acoustic localization, which are then converted into distance estimates. The aqueous medium, however, is heterogeneous, and the velocity of acoustic wave varies with parameters such as pressure, temperature, and salinity, so as to cause the Euclidean distance between the nodes to be different from the distance that the acoustic wave travels, which is called stratification effect.6–11 Ignoring this stratification effect may result in large deviations in range estimates. Second, in underwater positioning based on communication, time synchronization is the basis of converting time information into distance information due to the fact that the communication between the undetermined nodes and reference nodes is needed. The factors such as transmission time, propagation time, interrupt processing, decoding time, and so on,12,13 however, all affect the accuracy of the solution for clock synchronization through message exchange. The propagation time is regarded as the main influencing factor due to the slow acoustic signal propagation speed in UWSNs. The accuracy of the time synchronization algorithm14–21 assumed to be instant synchronous message reception is severely affected by such long-term propagation delay, which must be estimated and compensated so as to achieve more accurate time synchronization process in UWSNs. Finally, the underwater sensor node is susceptible to movement due to other factors such as water flow, which may result in a rapid change in the position coordinates of the node. In this case, it is difficult to estimate the real-time distance between the two sensor nodes, which challenges the localization. The continuous change in propagation delay will be caused by the mobility of nodes, which complicates time synchronization. Half of the round trip time is usually used by the existing time synchronization algorithms to calculate the one-way propagation delay. The propagation delays of entry and exit nodes, however, may not be the same due to the mobility of the nodes, which needs to be considered to improve the time synchronization accuracy.
Aiming at the problems discussed above, a mobile target localization scheme for UWSN based on iterative tracing (ITMTL) is proposed in this article. Four modules are established in ITMTL: the data collection and rough position estimation, the estimation and compensation of propagation delay, the node localization, and iteration. Time synchronization and localization between nodes will be performed at different stages for each round of message exchange. Different from many other methods which assume that acoustic waves propagate along straight lines in water environment, the stratification effect can be compensated by the proposed scheme ITMTL before estimating the propagation delay to improve the accuracy of it greatly. Moreover, an interacting multiple model (IMM) algorithm is put forward by ITMTL to predict the mobility of nodes so as to achieve more accurate positioning.
The subsequent sections are arranged as follows. The “Related work” section will analyze the problems encountered in the localization of underwater sensor nodes and typical solutions comprehensively. The “Description of ITMTL system” section will introduce the four stages of the proposed scheme. The single-hop network will be extended to multi-hop in the section “Construction of network-wide ITMTL” to achieve the construction of ITMTL in the whole network scope so as to realize the localization of sensor nodes in the network scope. The simulation results will be analyzed and the conclusion will be provided in sections “Performance evaluation” and “Conclusion,” respectively.
Related work
The localization method of UWSN can be divided into two categories: a distance-independent localization method and a distance-dependent localization method. The position relationships between undetermined nodes and reference nodes does not need to be known by using the former method, which is done mainly by discovering the local topology to determine the position of the undetermined nodes. The distance between undetermined nodes and reference nodes will be measured by the latter method before the conversion process from the distance to the position of undetermined nodes with the three-sided positioning method. The distance-dependent localization method will be studied in this article due to the high-precision UWSNs localization. Time synchronization process is considered as the basis for converting time information into distance information, but the researches of which are relatively limited. Chen et al. 22 proposed a wireless sensor network node synchronization technology based on MU-sync algorithm. Such technology uses a large number of two-way message exchanges, which greatly increases the energy consumption during the message transmission phase. Half of the round trip time is used by the MU-sync algorithm to calculate the one-way propagation delay. The clock synchronization accuracy, however, will be seriously affected by such estimation methods due to the mobility of underwater sensor nodes. Mobi-sync 23 achieved the estimation of propagation delay using the spatial correlation of node velocities, which allows the algorithm to estimate long-term dynamic propagation delays accurately. The Mobi-sync algorithm, however, is only available for dense networks. Time synchronization for high latency (TSHL) is a solution designed for high-latency underwater acoustic networks specifically, which solves the problems of long propagation delay and high energy consumption as well as combines one-way and two-way medium access control (MAC) layer message exchange for clock synchronization. The propagation delays between sensor nodes, however, are assumed to be constant, which may cause the clock synchronization being effected by the mobility of nodes.
In distance-dependent underwater localization studies, Chizari et al., 24 Saeed et al., 25 and Liu et al. 26 presented an approximate convex decomposition localization (ACDL) algorithm that uses beacon-assisted positioning that can move vertically to obtain the position by communicating with the GPS of the surface buoys, and then broadcasting the position at different depths to reduce the communication distance so as to expand the positioning coverage. Josso et al. 27 estimated propagation delay using half of the round trip time, which requires a sensor node to communicate with multiple surface buoys, but the heavy network traffic load cannot be ignored. The fact that Euclidean method can be used for three-dimensions underwater positioning in the case of short communication distance between reference nodes is proved by Liu et al. 28 The dimension of nodes positioning problem is transformed from three dimensions to two dimensions with a projection technique, which is proposed in Teymorian et al. 29 to reduce the computational difficulty greatly. Li et al. 30 proposed a passive positioning method utilizing multipath method based on a single underwater receiving node. A multipath signal with direct path signal, seafloor reflection, and ocean surface reflection were used to realize the position estimation of a single receiving node to the source target node in Goncharenko et al. 31 Nicholas et al. 32 introduced a Scalable Localization with Mobility Prediction (SLMP) method. The coordinates from GPS will be received by surface buoys as well as be sent to anchor nodes, which predicts its position before the position estimation using distance measurements and surface buoy coordinates. However, the performance of the used mobile anchor nodes cannot help the undetermined nodes to locate well and the high energy consumption cannot be ignored. Diamant and Lampe 33 proposed a sequential algorithm for joint time synchronization and localization of UWSNs. The mobility of sensor nodes and the uncertainty of acoustic velocity are considered; however, the lack of attention to the stratification effect of the aqueous medium may result in lower positioning accuracy.
Due to the three-dimensional structure of UWSNs, Isbitiren and Akan 34 considered the moving target in three-dimensional space, obtained the pure distance measurement of the target, and estimated the target position in combination with the three-side positioning method, and presented a self-organizing selection method of boundary nodes, which reduces the energy consumption of boundary nodes. Zhang et al. 35 analyzed the influence of node position structure on target tracking accuracy, and used Posteriori Cramer–Rao Lower Bound (PCRLB) to measure the measurement information under various node position structures, and selected the node subnet that constituted the optimal position structure for target tracking, so as to improve the target tracking accuracy and reduce the energy consumption at the same time. Yan et al. 36 modeled the acquisition of distance measurement as a closed-loop control problem, and accurate distance measurement was obtained by designing a proportional integral estimator, and a consensus-based traceless Kalman filter was proposed for estimation to obtain a more accurate target state.
Guo and Liu 37 proposed a positioning strategy that does not require anchor nodes. This strategy uses the positional relationship of neighbor nodes to determine the position of the node to be located. Guo et al. 38 adopted the idea of multi-objective optimization to solve the positioning problem of underwater nodes, and determined the coordinates of undetermined nodes by obtaining the minimum value of error function. A distributed positioning strategy was designed by using distributed network in Zhou and Willett. 39 Each sensor node reports binary detection results to the fusion center, which uses maximum likelihood estimation and linear fitting estimation to calculate the target position. Baumgartner et al. 40 applied the optimal control strategy to UWSNs target tracking, and an integral target function is used to represent the service quality of UWSNs target tracking, so as to transform the problem of sensor movement trajectory into an optimal control problem. Ramezani et al. 41 gives the underwater target tracking strategy under the flight time measurement model, and the corresponding PCRLB.
Description of ITMTL system
The architecture of UWSN is shown in Figure 1. The proposed ITMTL scheme assumes that the reference nodes are composed of surface buoys and anchor nodes, in which anchor nodes can communicate with surface buoys directly, and the normal nodes are nodes that need time synchronization and localization. The speed of acoustic propagation under water is related to pressure, salinity, temperature, and other parameters, while the pressure and temperature at different depths of water vary greatly. Therefore, the fact that underwater acoustic signal does not propagate in a straight line can be concluded as shown in Figure 2.

Underwater sensor network architecture.

Sound velocity profile.
Overview
The proposed ITMTL scheme consists of four modules: (1) Data Collection and Rough Position Estimation, (2) Estimation and Compensation of Propagation Delay, (3) Node Localization, and (4) Iteration, with the help of which the proposed scheme can solve all the three core problems in the practical application and research of time synchronization and node localization. Figure 3 is the system architecture of the proposed scheme with the specific processing as follows. First, the timestamps are collected and the TDOA method is used to estimate the rough position of the node in the first round of message exchange. The stratification effect will be compensated before the propagation delay estimation process. After that, linear regression synchronization will be performed on the undetermined nodes using the previously collected timestamps and the propagation delays calculated in the previous rounds of message exchanges to update the clock skew and offset, which can help update the propagation delay. Moreover, an IMM tracing algorithm is put forward in ITMTL to reduce the impact of nodes mobility on localization. Finally, the previous process is iterated, and the position calculated by the localization phase is used as a rough position in the next round of message exchange. The entire iteration ends when no more messages are exchanged. The four modules of the ITMTL scheme are introduced below.
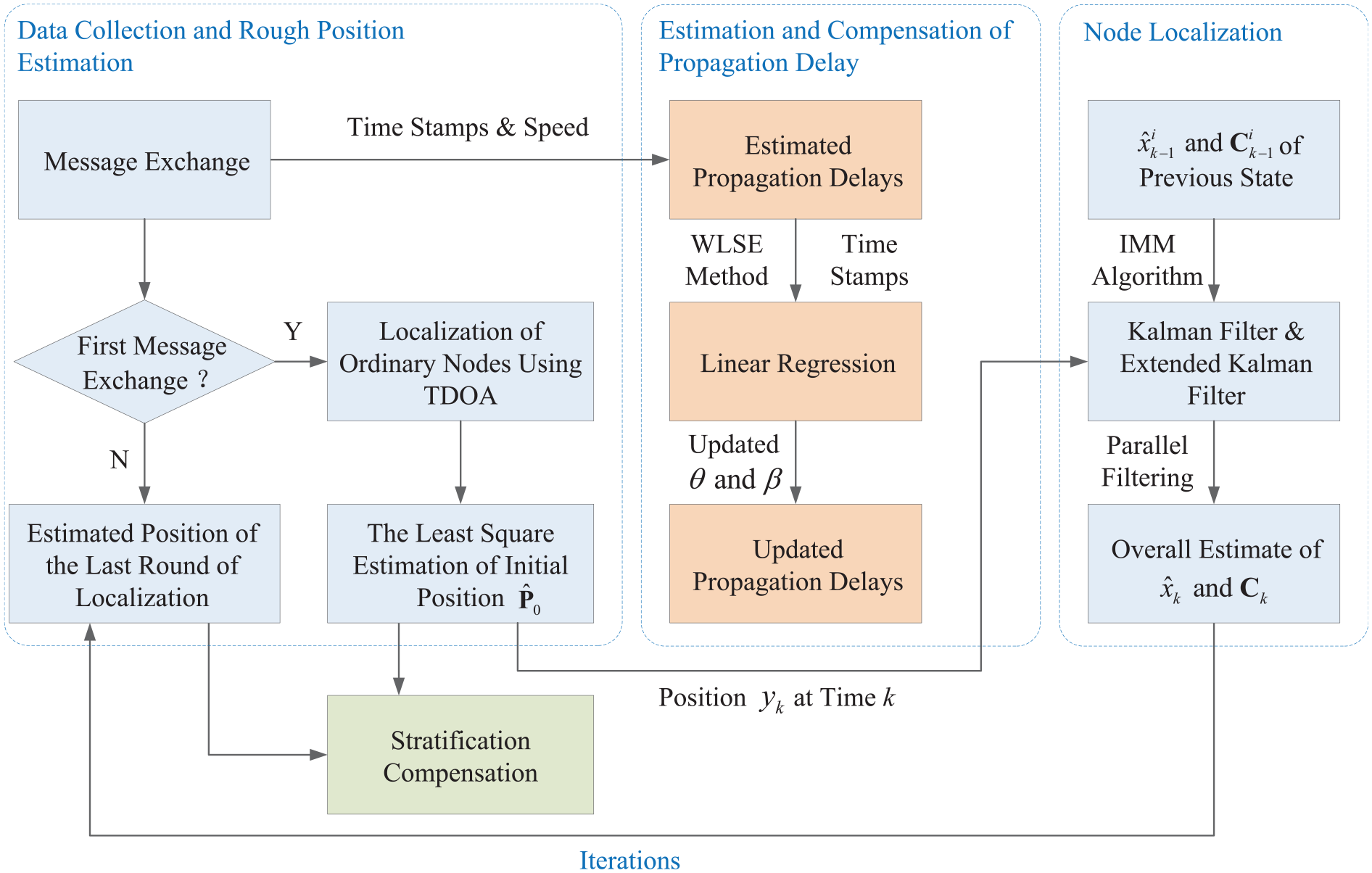
The proposed system architecture.
Phase 1: data collection and rough position estimation
Message exchange is initiated by the ordinary node with transmitting a Req message to its neighboring reference node first, and the transmission timestamp T1[N] obtained at the MAC layer before the message leaves will be recorded. The local time will be marked as t2[N] by each reference node and the moving speed
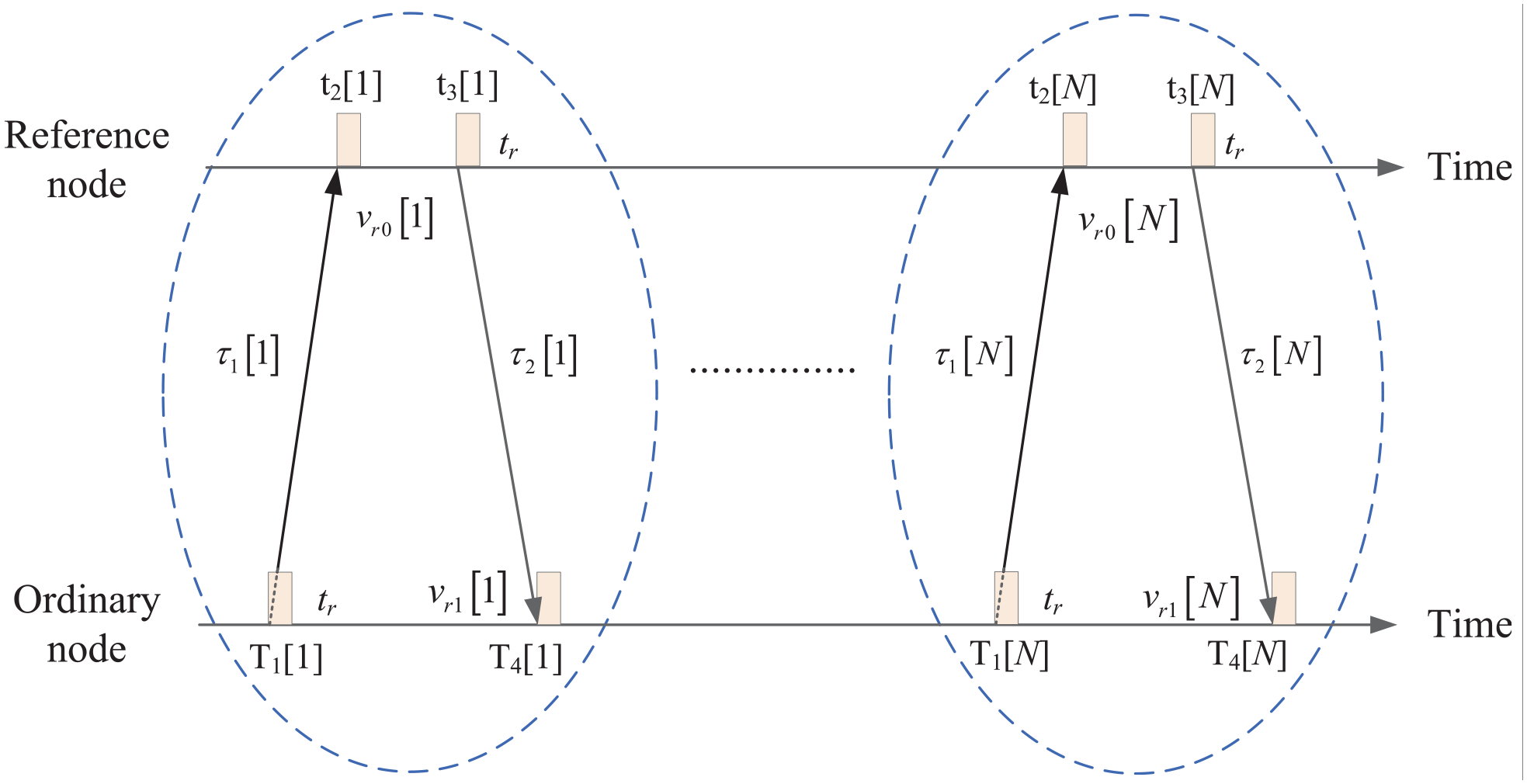
Message exchange process between each pair of nodes.
The initial position of nodes will be estimated after receiving the Res message from all reference nodes, which is considered as a rough position due to the stratification effect as well as the fact that the ordinary node has not been synchronized. The proposed scheme applies the TDOA method to estimate the rough position with the condition of the first round of message exchange being performed. The TDOA positioning method is actually a method based on hyperbolic curve with the schematic diagram as shown in Figure 5, from which we can see that three or more hyperbolas can identify a unique point on a two-dimensional plane.

The basic diagram of TDOA.
We suppose that there are

where
During this stage, we assumed that the ordinary node has been synchronized and the average underwater acoustic propagation speed is a constant value first to calculate the rough position of the ordinary node. An initial clock skew “1” and an initial clock offset “0” are set and the reference node 1 is considered as the reference point. Let


where

The LS estimation of the initial position of the ordinary node can be obtained by equation (5)

where


The clock skew and clock offset can be expressed as
The TDOA localization method determines the position of the undetermined node by calculating the time difference between the signal reaching the ordinary node and the reference node, instead of the absolute time to the ordinary node, which reduces the time synchronization requirement for the common node and the reference node. Therefore, TDOA positioning does not need special timestamps, and the positioning accuracy is also improved.
If the first round of message exchange is not performed, the estimated position obtained by the previous round of localization process will be considered as the rough position of ordinary node.
Phase 2: estimation and compensation of propagation delay
Since propagation delay is the main factor affecting the time synchronization of underwater sensor nodes, and node time synchronization is the premise of localization, long propagation delay must be estimated and compensated so as to achieve more accurate UWSN node positioning. Three stages are made up in this phase as the propagation delay estimation, the linear regression synchronization, and the propagation delay update, which will be described in detail below.
Propagation delay estimation
The stratification effect will be compensated by the proposed scheme to improve the accuracy of the propagation delay estimation when the aqueous medium is heterogeneous. Figure 6 illustrates an iso-gradient acoustic velocity profile only related to depth. Since the sender and receiver are on a two-dimensional plane, the stratification effect compensation process in the two-dimensional coordinate system is only described below.
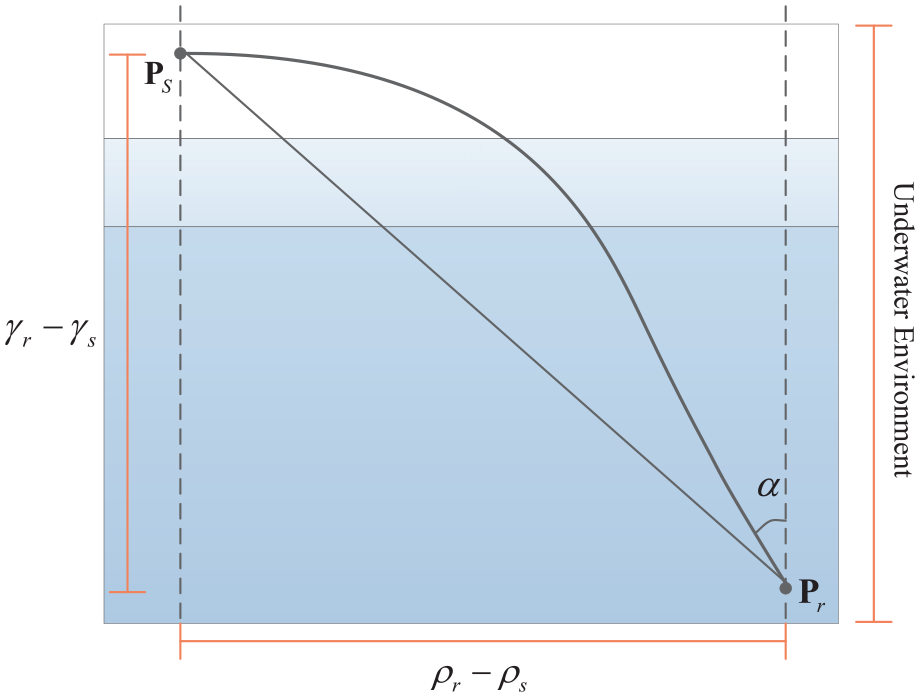
Illustration of stratification effect.
The position coordinates of the sender and receiver are assumed to be

where

The function

So, equation (8) can be further written as follows

The fact that the real transmission path is the path that minimizes the transmission time according to Fermat’s principle may cause the following Euler–Lagrange equation being used by the proposed scheme to solve the function


Rearranging the sides of the equation, equation (13) can be simply rewritten as

where

where

The shortest transmission time associated with a path can be represented as equation (17)

Using the known

The propagation delays

Since the propagation delay of the estimated message only needs to study the relative speed, the proposed scheme only considers the one-dimensional speed. It is assumed that the relative speed between the reference node and the ordinary node changes linearly, and the propagation speed of the acoustic signal is constant. We use

where

Let

The propagation delays

The time stamp, velocity, and the clock skew
Linear regression synchronization
In this step, the ordinary node performs linear regression on the data points in
The squared error between the actual value and the estimated value is calculated as equation (24)

where

The derivatives of
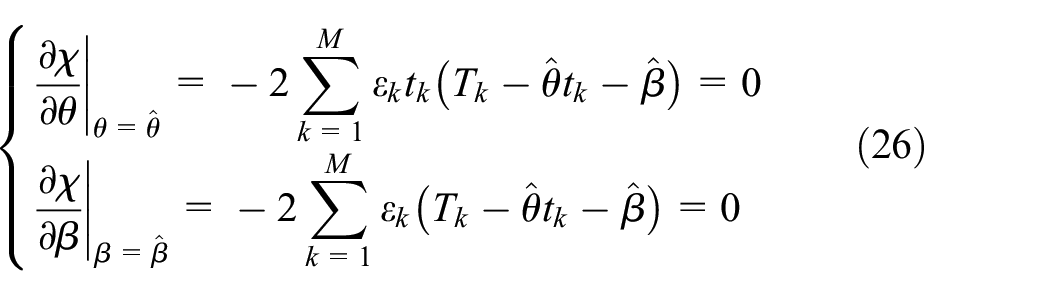
The LSs estimation of

where

The value of
Propagation delay update
Equation (29) can be obtained by combining the clock skew
Therefore, the propagation delay can be updated in combination with the updated timestamps and equation (23). The error introduced by this process will be calibrated by the proposed scheme due to the fact that the initial clock skew value “1” is being applied in step A. The initial clock skew will be updated with the latest estimation
Phase 3: node localization
After the propagation delay is estimated and compensated, the sensor node can be located. The fact that the sensor nodes are in a moving underwater environment makes it difficult to estimate the real-time distance using the above algorithm. Considering the mobile target whose motion state cannot be fully grasped by a simple mathematical model, the motion state of the sensor node can be modeled by making assumptions and then approximating. A “Multiple Model” tracking algorithm is used by the proposed scheme to jointly describe the motion state of the maneuvering target through multiple models.
The basic idea of a multi-model algorithm is to give a set of models that cover all possible motion states of the target. Different filters are applied to different target state models, and each filter uniquely corresponds to one model in the model set. A group of filters are run in parallel, and the overall state estimation is a combination of the state estimations of each filter. The IMM algorithm will be used by ITMTL to reduce the influence of node mobility on positioning, which will be described in detail as follows.
The IMM algorithm assumes that the system is in a specific mode at the current moment, and obtains the re-initialization conditions of filters corresponding to this mode through interactive mixing of the state estimation of all filters at the previous moment. After that, each model is filtered in parallel. Finally, the model probability will be updated based on the model matching likelihood function, and all the filter estimation results obtained by parallel filtering will be weighted and integrated to obtain the final overall state estimation.
There are two main features that are obtained by the IMM algorithm. First, it has a parallelized and modular calculation process, and various linear or nonlinear filtering algorithms can be selected by the model according to different situations, which may improve efficiency with the method of parallel calculation of each module. Second, the model probability can be determined by the result of the filter estimation as well as can adjust the model structure.
The specific process of the IMM algorithm is as follows. Assuming that there are

where
First of all, the input interaction process is executed as follows


where

where
The likelihood function of each model can be calculated as equation (35) according to the residual and residual covariance obtained in the filtering

where

Finally, the overall state estimation and the total error covariance matrix of each model can be further written as equations (37) and (38), respectively


Two models of nodes are considered by the proposed scheme: a uniform velocity model and a constant velocity coordinated turning model. The former one is modeled by Kalman filter, while the latter is modeled by extended Kalman filter. The block diagram of the localization tracing program of the proposed scheme is shown in Figure 7.
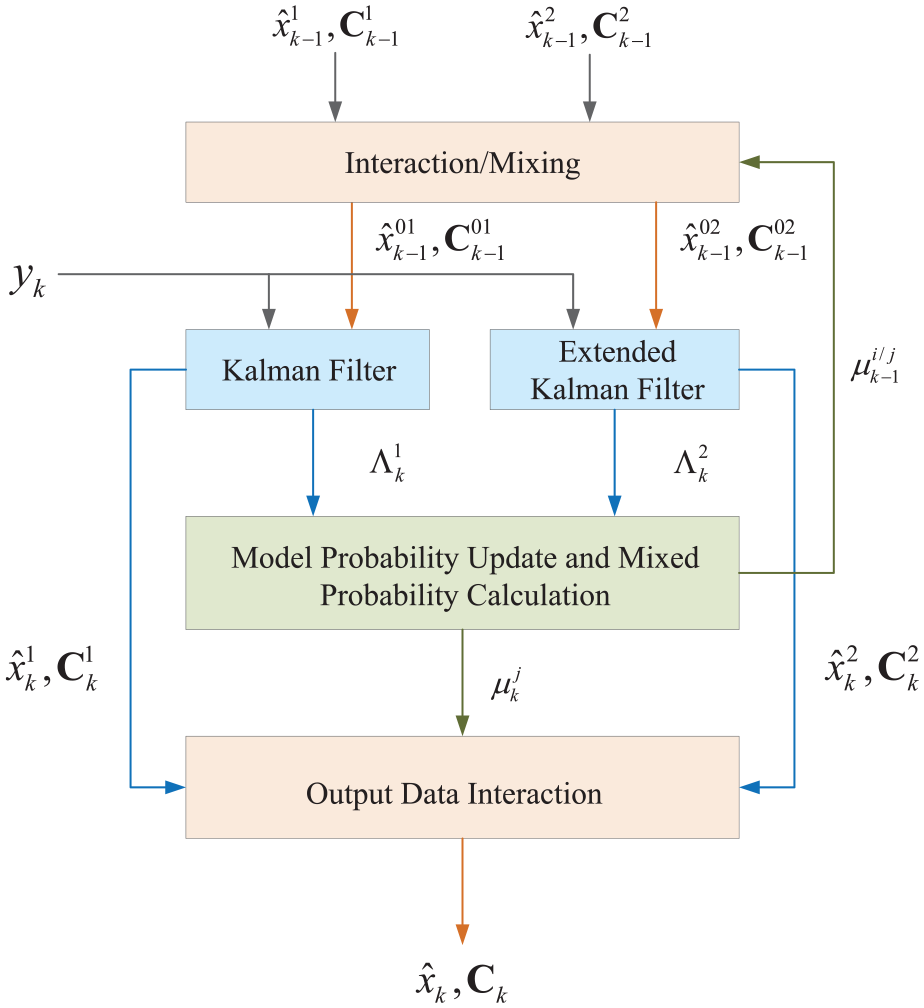
Block diagram of location tracking program.
Phase 4: iteration
In the iteration phase, the estimated position in the localization phase will be considered as the rough position in the next round of message exchange, and all timestamps and their corresponding propagation delays are input into the estimation and compensation phase of the next round of propagation delay. The entire ITMTL process is completed until there are no more message exchanges.
Construction of network-wide ITMTL
The single-hop network needs to be extended to multi-hop and more other reference nodes need to be considered to achieve the localization of sensor nodes in the network scope in the case of not every undetermined node can reach three or more anchor nodes. Actually, after the localization of those ordinary nodes reachable by at least three anchor nodes, they may be used as new reference nodes to assist other ordinary nodes in positioning, which involves network-wide positioning errors that need to be reduced by screening new reference nodes.
A hierarchical calculation method is applied by the proposed scheme for the network-wide ITMTL construction. Such a method is divided into two parts. First of all, the localizations of the ordinary nodes reachable by at least three anchor nodes are performed according to the above algorithm. These ordinary nodes are associated with the confidence value

where
In the second part of the method, the ordinary nodes accessed by less than three anchor nodes will be located with the assistance of new reference nodes, some of which may become new reference nodes to assist other ordinary nodes. Therefore, the proposed ITMTL can be extended to a network-wide solution using this recursive strategy with the localization process of each undetermined node in the network scope being described in Figure 8.

Synchronization and localization process of ordinary nodes in network.
Performance evaluation
Simulation settings
The simulations are implemented in an Aqua-Sim simulator
42
based on NS-2 designed for UWSNs specifically. Ten sensor nodes are distributed in the area of
Two sensor node mobility patterns are considered in this simulation: uniform motion and constant turning. Therefore, an IMM-tracker with the above two modes is used. The former one is modeled by Kalman filter, while the latter is modeled with an extended Kalman filter. The uniform motion model holds that although the presence of interference will change the target’s motion speed at the next moment, the target is uniformly moving on the whole (non-maneuvering state). The biggest advantage of this model is its simple form. When the target’s maneuvering range is small or the sampling interval is short, the target’s movement can be effectively approximated to the uniform motion. Watson and Blair
43
described the motion of the target through the transfer matrix with angular velocity as the parameter. They assumed that the curve motion made by the target was a uniform circular motion, and established a circular model based on the angular velocity, linear velocity, and tangential and normal acceleration of the target and their relationship, also called constant turning model. The constant turning model is used to simulate the motion model when the target performs a turning motion with constant angular velocity. The kinematic model
44
commonly used in underwater network research is applied to simulate in terms of water flow.
Synchronization and localization accuracy and convergence analysis
The time drift after performing time synchronization with different algorithms is shown in Figure 9, which compares the time synchronization accuracy of the algorithms including the proposed ITMTL, ITMTL without stratification compensation (called ITMTL-wsc), Mobi-sync, and TSHL. The x-axis of Figure 9 is

Time synchronization accuracy of different algorithms.
The localization accuracy comparison of the algorithms on different numbers of available reference nodes is shown in Figure 10. The localization process with anchor nodes as the reference nodes is only studied in this simulation. The normalized mean square error (NMSE) is expressed as

Localization accuracy of different algorithms.
The accuracy convergence of time synchronization and localization as the number of iterations increases are shown in Figures 11 and 12, respectively. Simulation results indicate that the accuracy of both time synchronization and localization will improve with the number of iterations increasing due to the increase in the number of iterations means that more data can be collected, which is conducive to improve the accuracy of propagation delays estimation and thereby improving the localization accuracy of nodes. On the contrary, the position information generated in the current localization phase will be used as the rough position in the next round of time synchronization. Overall, the time synchronization and localization in the proposed ITMTL in this article assist each other to improve the accuracy of both.

Convergence of synchronization accuracy.

Convergence of localization accuracy.
Impact of stratification effect
It can be observed that ITMTL-wsc will generate a higher time error than the proposed ITMTL scheme under the same iteration amount in the stage of estimating and compensating for the propagation delay from Figure 11, with the maximum difference of 56.67%. Similarly, Figure 12 also describes that the NMSE of the proposed ITMTL will decrease by about 25.8% compared with ITMTL-wsc at the same iteration amount in the stage of node localization to make the proposed ITMTL scheme achieve higher accuracy than ITMTL-wsc. The comparisons show that this stratification effect being ignored will lead to a large deviation in range estimation, which can affect the estimation of the propagation delays. The errors caused by the deviation of range estimation will affect the accuracy of time synchronization and node localization eventually due to the fact that the propagation delay is the main factor that affects the time synchronization of underwater sensor nodes, which is the premise of localization.
Performance of IMM tracing mechanism
The impact of the IMM tracing mechanism on the node localization phase is shown in Figure 13. The curves show that the NMSE of localization with IMM tracing mechanism is always lower than the NMSE without any tracking algorithm. Specifically, when the coefficient
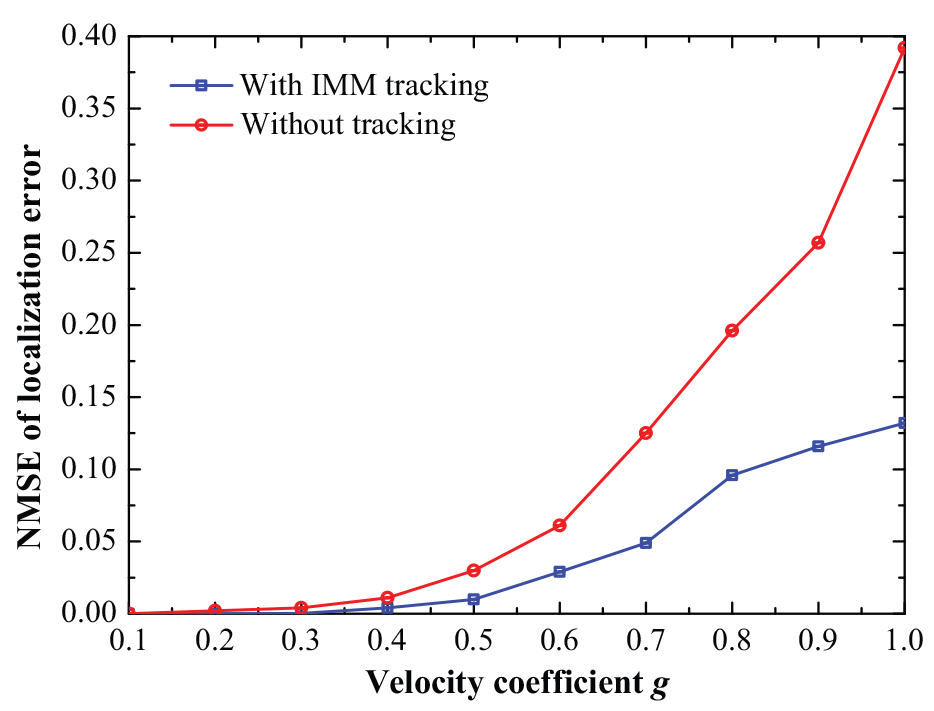
Effect of tracking.
Effect of mobility pattern
Figure 14 evaluates the effect of the mobility pattern of underwater sensor nodes on positioning. The underwater sensor node will move with the flow of the water. In order to compare with the kinematic model we selected, random walk pattern and meandering current mobility 45 pattern which has velocity as equation (40) were also considered. Random walk is a movement model without memory. The speed and direction of the current movement have nothing to do with the last moment

where
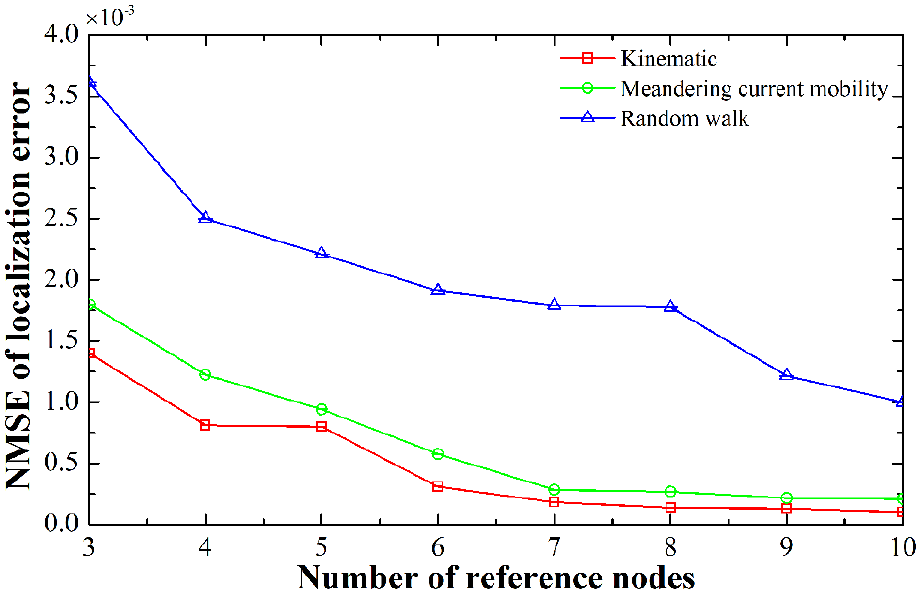
Effect on localization.
Range of synchronization and localization
Figure 15 reveals the impact of node density and the number of anchor nodes in the whole network on the range of node time synchronization and localization. When the node density is 10, the range of node time synchronization and localization with 30% anchor nodes is approximately 1.8 times larger than that with 10% anchor nodes. With the node density increasing by every 0.5, the range of node time synchronization and localization with 10%, 20%, 30% anchor nodes will extend by about 0.05, 0.025, and 0.01, respectively. On one hand, the scope of node time synchronization and positioning will increase with the node density increasing when the proportion of anchor nodes in the whole network is constant due to the fact that the node density is proportional to the connectivity of the whole network. The anchor node can cover more ordinary nodes and generate more new reference nodes when the node density is large. On the other hand, the larger the proportion of anchor nodes in the whole network is, the more ordinary nodes will be covered by the anchor nodes directly or indirectly when the node density is constant, so as to extend the time synchronization and localization range of undetermined nodes.

Range of synchronization and localization.
Network-wide synchronization and localization error
The average synchronization errors (ASE) of ordinary nodes in the whole network that performs time synchronization using the proposed ITMTL are shown in Figure 16. The simulating results indicate that the ASE is inversely proportional to the node density when the proportion of anchor nodes in the whole network is constant, which is mainly because more ordinary nodes can be covered by anchor nodes with the node density increasing. Therefore, there are more ordinary nodes that perform time synchronization through anchor nodes directly, the advantage of which can reduce the accumulation of synchronization errors in time synchronization using the newly added reference nodes so as to improve the synchronization accuracy. Similarly, the larger the proportion of anchor nodes in the whole network is, the more ordinary nodes will perform time synchronization through anchor nodes directly with the node density fixing, which reduces the synchronization error by up to 48.07%.

Network-wide synchronization error.
Figure 17 plots the average localization errors of ordinary nodes in the whole network that performs localization using the proposed ITMTL. The simulating results indicate that the NMSE of positioning is inversely proportional to the node density and anchor node ratio. When the node density is 3, the NMSE of localization with 30% anchor nodes is approximately 7.6 times less than that with 10% anchor nodes. Similar to the synchronization process, more ordinary nodes will be positioned through the anchor nodes directly, no matter the increase in node density or the increase in the proportion of anchor nodes. The accumulated errors when new reference nodes are used to assist positioning will be reduced to improve the localization accuracy.

Network-wide localization error.
Conclusion
Aiming at the problem of the stratification effect of underwater acoustic waves, the long propagation delay of messages, as well as the mobility of sensor nodes encountered in the research of UWSNs in marine environment monitoring, marine resource development and utilization, and so on, ITMTL for UWSN is proposed in this article based on iterative tracing. The bias of distance estimation caused by the assumption that acoustic waves travel along a straight line in an underwater environment will be compensated in ITMTL, and an IMM algorithm is also put forward to track moving sensor nodes. Moreover, time synchronization and localization of nodes are also combined by ITMTL through an iterative process closely so as to assist each other to improve their accuracy. Simulating results show that the proposed ITMTL can achieve higher positioning accuracy than other schemes and the validity of ITMTL is verified. Future research will consider the impact of time-varying transmission rates on ITMTL performance and find an algorithm that can locate nodes with lower message exchange overhead effectively.
Footnotes
Handling Editor: Antonio Lazaro
Author contributions
R.G. and D.Q. conceptualized the idea and designed the experiments. R.G. contributed in writing and draft preparation. M.Z. implemented the algorithm and conducted experiments. G.X. analyzed the experimental results. D.Q. supervised the research. All authors have read and agreed to the published version of the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The funding was supported by the National Natural Science Foundation of China (61771186), Postdoral Research of Heilongjiang Province (LBH-Q15121), and Undergraduate University Project of Young Scientist Creative Talent of Heilongjiang Province (UNPYSCT-2017125).