
Abstract
For large-scale wireless sensor networks, the nonlinear localization problem where only neighboring distances are available to each individual sensor nodes have been attracting great research attention. In general, distributed algorithms for this problem are likely to suffer from the failures that localizations are trapped in local minima. Focusing on this issue, this article considers a fully distributed algorithm by introducing a novel mechanism, where each individual node is allowed to computationally interact with a random subset of its neighbors, for helping localizations escape from local minima. Theoretical analyses reveal that with the proposed algorithm, any local minimum of the localization will be unstable, and the global optimum would finally be achieved with probability 1 after enough time of iterations. Numerical simulations are given as well to demonstrate the effectiveness of the algorithm.
Introduction
Wireless sensor networks have been attracting great attention since a large number of simple sensor nodes working cooperatively can bring plenty of advantages. With the increasing requirement of cooperations among sensors, the problem of node localization arises since position information plays a crucial role in complex collaboration. However, as the network scale grows, manually configuring positions for each node would become a disaster, and equipping all nodes with high-precision Global Navigation Satellite System (GNSS) receivers not only costs much but also is strongly environment dependent. Nowadays, it is widely believed that localizing nodes using relative measurements is of great benefits to large-scale sensor networks. Among varieties of inter-node information, the relative distance is favorite due to its low-cost economy, unlimited field of view, and high precision. Therefore, plenty of research interest has been focused on the localization using relative distances. However, the main issue troubling the research is that even in the absence of measurement noises, the distance-based localization is a nonconvex optimization problem with many local minima.
In general, node localization algorithms can be classified into two categories: centralized ones and distributed ones.1–6 The centralized ones mainly include elaborately designed heuristic optimization algorithms, such as the genetic algorithm, simulated annealing algorithm, ant colony optimization, and particle swarm optimization for localization. Besides, kinds of model-based nonlinear fitting algorithms are also included, 7 where a central model of the relative structure with respect to node positions is used for collecting and fitting all the distance measurements among nodes. However, centralized algorithms completely rely on global information and centralized computations, put forward heavy requirements on network conditions, and lack of the feasibility and flexibility for network scales, 8 despite the fact that they can obtain an excellent solution after running for enough time of iterations.
On the contrary, distributed algorithms behave in a decentralized manner without using any global information. Further divisions of distributed algorithms can be made, according to whether the localization process is simultaneous for all the nodes or not, into incremental algorithms and concurrent algorithms, respectively. The former algorithms locate nodes sequentially in an incremental way, where positions are solved by starting with the group of anchor nodes, and from the close-by nodes to those far away. In each iteration, any node whose position has been solved is designated as an anchor node.2–5 These algorithms are simple to understand and easy to implement. However, they are error-prone because errors would be accumulated along the solving paths. This drawback can cause a fatal localization crash for large-scale networks. In contrast, the latter algorithms solve positions for all the nodes simultaneously, where each individual node in the network updates its position estimate synchronously in each iteration following the same protocol,9–23 In general, concurrent algorithms are more competent for large-scale networks and become the research emphasis in distributed localization problems.
In the studies of concurrent algorithms, many works focus on the problem of localization refinement, where rough position estimates are desired to be refined to more accurate ones.12–16 Toward this goal, the position estimate of each node is often considered as a distribution rather than a single point, and nodes then refine their position estimates by modeling the distribution characteristics, by intersecting the neighboring distributions, and by fusing data within the intersections. If the models of both the localization process and the noises are available, then estimates can be refined by making the noisy measurements best fit the model from the perspective of probability distribution, and thus, a refined localization result with extremely high precision would be obtained. However, the refinement is deeply restricted by two major assumptions, without which the process would fail. First, the models are assumed to be exact enough to describe the actual signals. Second, rough position estimates are assumed to be known prior to nodes. For getting a proper starting point for the refinement localization, research turns to the study of the lost-in-space localization, where nodes have no prior knowledge on positions and need to produce position estimates from a large solution space. Toward this goal, position estimates can never be considered as distributions, since the initial error of starting points would probably go beyond the assumed bound of probability distribution models. Generally, most research treats the position estimate as a single point instead.9,11,17–20,22,23 In the studies by Priyantha et al., 9 Howard et al., 18 and Gotsman and Koren, 19 a distributed localization algorithm, which can be referred to as the mass–spring relaxation (MSR) algorithm, is developed using the gradient descent method for guaranteeing the convergence to local optima. MSR regards the estimates on node positions as distinct virtual masses, and the resulting distances among masses as springs. Depending on the error between the resulting distance and the measured one, every spring is recognized to be either “compressed” or “stretched.” Along the gradient direction, a compressed spring provides a repulsive force that pushes two neighboring nodes away, and a stretched spring provides an attractive force that pulls the nodes near. Virtual masses will thus cooperatively keep moving under spring forces until they get a balanced assignment, which is regarded as the solution of localization. However, the balanced assignment using MSR only corresponds to local minima, because the distance-based localization optimization is of high nonconvexity even in the absence of measurement noises.9,17,22
To solve the local-minima issue, varieties of methods have been considered. For example, the information of hop-counts among nodes can be used in advance to generate an excellent starting point that is close to the global minimum, for the followed localization process using MSR algorithm. 9 But the starting point cannot be always good enough, especially when the network connectivity is large. The information of additional mobile anchor nodes is also helpful, because varying distances can be introduced to save the localization from local minima.24–26 But this method brings difficulties in engineering implementation as well. Without requiring any additional information, Zhu and Ding 11 proposed an MSR-based “pulled-only” algorithm, where only the stretched springs are retained while the compressed ones are ignored. But this method requires that the problem be convex, that is, all ordinary nodes need to lie inside the convex hull of the anchor nodes. Naraghi-Pour and Rojas 22 proposed an observer for monitoring localization errors and used an error-triggered strategy. Under the strategy, active disturbance noises are additionally put on position estimates whenever the observed localization errors are large. This method is suitable for dealing with nonconvex problems, but it brings additional issues to designing toggle conditions and generation noises. Besides, the global optimum would be unstable under this method, since toggle conditions cannot be exact in the absence of uncertain measurement noises. We should point out that for the sake of brevity, our survey of previous work here is short of complete and only contains the previous work related to our work. For a more complete survey, we refer to the studies by Yassin et al., 2 Paul and Sato, 6 and Naraghi-Pour and Rojas. 22
Focusing on the local-minima issue in distance-based localization problems, this article considers a concise topology-controlled mass–spring relaxation (TCMSR) algorithm that allows node to computationally interact with only a random subset of its neighbors, for help localizations escape from local minima. The significant contributions of the algorithm are fourfold: (1) the global minimum would still be stable under the algorithm, while any local minimum would not; (2) the algorithm would finally achieve the global optimum with probability 1 after enough iterations; (3) no additional information is needed for assisting the localization. Actually, on the contrary, less information is used in the algorithm; (4) the algorithm addresses the issue in the topology control level only and does not conflict with other existing algorithms, meaning that TCMSR can be used for improving these existing algorithms.
The rest of this article is organized as follows: Section “Preliminaries” reviews the preliminaries of the graph and the traditional mass–spring algorithm. Section “TCMSR algorithm” formally proposes the TCMSR algorithm along with theoretical analyses and discussions. In section “Simulations,” numerical simulations are performed and show the effectiveness of the proposed algorithm. Finally, remarking conclusions are given in section “Conclusion.”
Preliminaries
Notation and definition
Consider a network consisted of
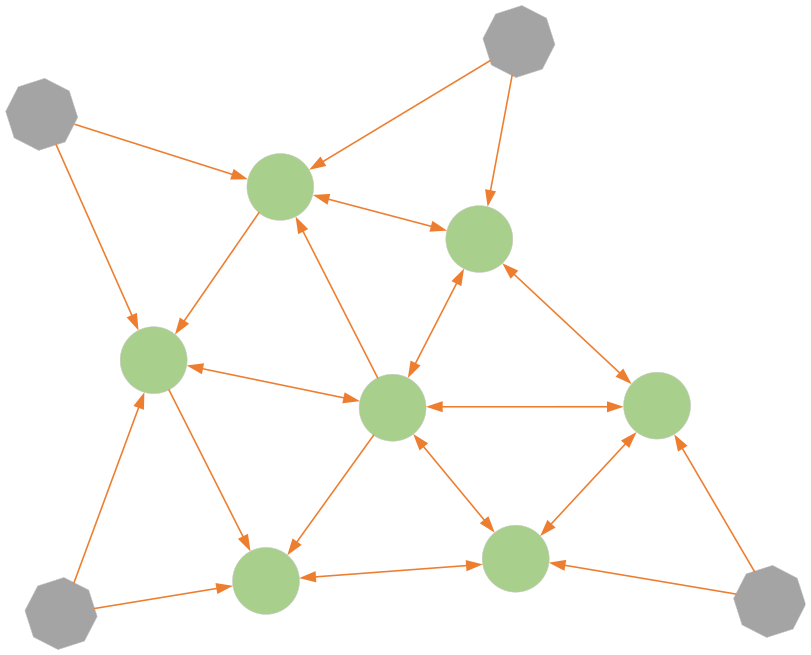
A sketch of a simple distance-based sensor network with four anchor nodes (as the octagons) and seven ordinary nodes (as the circles). Lines between nodes indicate the directional interaction relationships.
Denote by
The localization problem can be then defined in the following.
Localization problem
Given a sensor network with an undirected graph
It is worthwhile to mention that although the assignment might not be unique in some cases where specific mirror symmetry occurs or the network is incompletely observable, 27 the localization problem in this article only targets at the case with sufficient observability and a unique embedding assignment.
MSR algorithm
The MSR algorithm is recalled here in detail in order to help make its main principle clear. Although the MSR algorithm has different aliases (e.g. anchor-free localization algorithm) in the research literature,9,17–20 its principle remains the same. In the MSR algorithm, the nodes are treated as distinct virtual masses, and the resulting distances among the masses are treated as a group of springs that connect neighbor nodes. Besides, the node position estimates are considered as the real-time positions of the masses, and the distance measurements are considered as the unstressed lengths of the springs. For every mass
In a mathematical expression, the MSR algorithm9,17–20 updates the position estimate for each node following
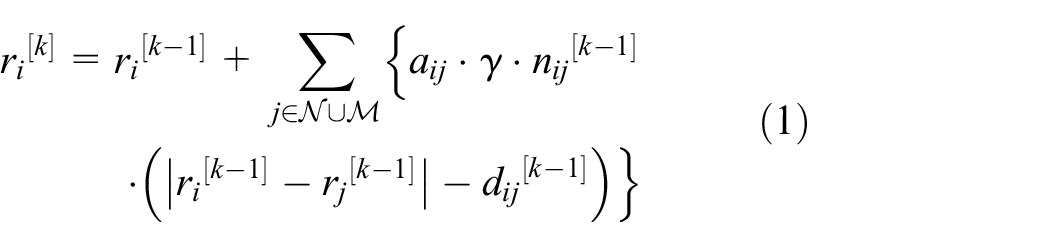
where the superscript [k] indicates the moment
Performance metric for localization errors
Global energy ratio
The global energy ratio (GER) is used to indicate the structural error of the localization, given by 9
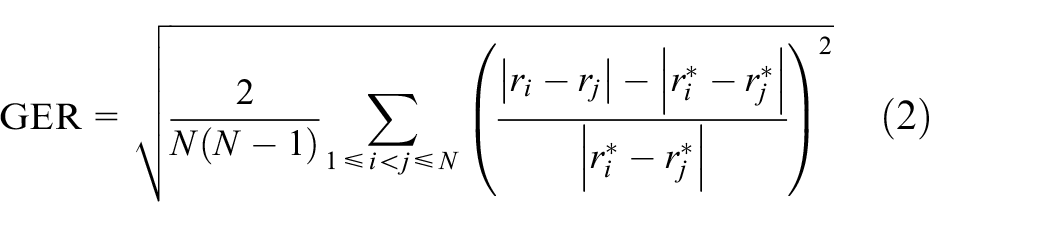
The smaller the GER is, the better performance the localization would achieve. In the absence of measurement noises, the global minimum of the localization always corresponds to a GER value near 0.
TCMSR algorithm
In this part, we develop a useful interacting mechanism for each node at first, give a brief explanation on the role of the mechanism after that, and present the TCMSR algorithm at last.
Interacting mechanism
The mechanism is such established that for all nodes in a sensor network, interaction no longer follows the physical topology itself, but the computational topologies that are produced upon it.
Figure 2 illustrates the way of producing computational topologies upon the physical topology, where a series of controlled switches are imaginarily mounted on all the edges of the physical topology. Note that each undirected edge will be considered as two independent directed edges and be mounted by two independent switches. For example, suppose that nodes
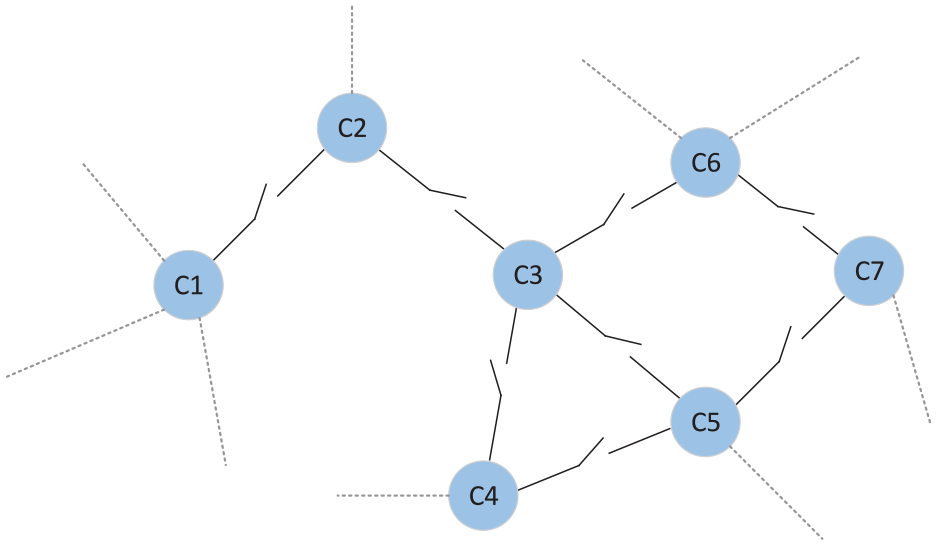
An illustration of how to produce computational topologies upon the physical topology. As the imaginary switches are turned on or turned off, the information interaction among the nodes will be changed, yielding corresponding computational topologies.
Denote by a series of
In this article,

here,
The interacting mechanism developed in this article can be then known as the rule that nodes interact following
Brief explanation
Although the introduction of the mechanism seems trivial, its nontrivial contribution lies exactly in that the mechanism can effectively save the localization from being trapped in local minima. To explain this, we look into equation (1) and observe what has happened in local minima. For brevity, we simply refer to the term
First of all, we would like to explain the exact reason why traditional MSR may be trapped in local minima. Equation (1) expects that for any node
For helping better understand the reason explained above, we take Figure 6 as an instantiation of local-minima-trapped localizations. Without loss of generality, focus on a specific node
List of

MSR: mass–spring relaxation.
Next, we explain why our mechanism can easily break up the trap. By selecting a proper
Formal proposal of the algorithm
The TCMSR algorithm can be straightly proposed as
where [k],
Before going on, some lemmas are given as follows.
Lemma 1
Let
Lemma 2
If the union of the set of simple graphs
Lemma 3
Any local minimum will be unstable under algorithm (equation (4)).
Proof
The proof can be simply performed by reduction to the absurd. Suppose that there exists a stable local minimum at time slice
Lemma 4
The global minimum stays stable under algorithm (equation (4)).
Proof
For the global minimum,
With these lemmas, the following theorem can be studied.
Theorem 1
For a localization problem with an initial guess as the starting point, the global minimum of the localization can be finally achieved with probability 1 using the TCMSR algorithm (equation (4)) for enough iterations.
Proof
First of all, we show that the algorithm can converge at least to some minima. At any time, each node
The difference between the estimated distance and the measured distance immediately generates either an attractive or a repulsive velocity
The structural energy
Denoting
At any time, one can always treat

With the observation that

Since equation (7) is component-wise in form, one can just consider it in a one-dimensional case, and the consideration of other dimensions is the same. Therefore, equation (7) can be rewritten in the compact matrix form, yielding

where
Due to the fact that the physical graph

with
Second, Lemma 3 points out the fact that any local minimum will be unstable under the proposed algorithm. Since the computational topology is randomly produced upon the physical topology, the motion trajectory escaping from the current minimum would vary with different iterations and thus will reset varying starting points for the next localization epoch.
Third, since the starting points of the localization vary after local minima are escaped from, the probability for a single localization epoch to converge to the global minimum, termed as

This indicates that the global minimum can be eventually achieved using the algorithm.
Finally, Lemma 4 shows that the global minimum will be stable whenever it is achieved. Above all, the proof has been completed.
Additional discussion
First, we would like to discuss the parameter
To the best knowledge of the authors, there is hardly no mathematical method to exactly solve both the primal and the dual problems. In other words, the problem of choosing an optimal parameter remains unsolved and needs further research.
In this article, we temporarily provide an empirical way to help determine a workable value for the parameter. On one hand, by recalling the reason of the trap of local minima, we know that the trap takes place because the neighboring components counteract each other. It is then clear that for each node, the degree of counteraction will become heavier when the number of neighbors gets large (in analogy with molecular thermal movement), and hence, a smaller

Second, it is worthy of mentioning that the time complexity of TCMSR is not higher than that of MSR and has no relation with the size of sensor networks. Compared to MSR, TCMSR introduces no extra action in the communication process and uses less neighboring information to take part in the updating process. The only introduced action is the lightweight generation of
Simulations
In this section, we verify the proposed TCMSR algorithm by numerical simulations and compare it with the traditional MSR algorithm. The only parameter
Specific case: with a fold-free (good) starting point
In the first experiment, we compare the MSR and the TCMSR with a fold-free starting point in an instantiation of sensor networks. The sensor network is deployed in a 400 units by 200 units (unit of length, for example, centimeter, meter, and kilometer) two-dimensional square space, where

A sensor network instantiation generated in the simulation with
Both MSR and TCMSR are given a same fold-free starting point, which is actually in a close neighborhood of the correct assignment. The localizations are then performed using the two algorithms, respectively, and their results are plotted simultaneously in Figure 4. It can be seen that both the two algorithms can successfully make the localization converge to the global minimum (i.e. the correct assignment). Despite that the performances of the two algorithms seem similar, the slight performance difference between the two algorithms lies exactly in the feature that TCMSR would jitter stronger than MSR does when they are converging. This is because TCMSR uses computational topologies to interact among nodes instead of the fixed physical topology, and the switching of computational topologies cause the jitter. However, the jitter reflects that TCMSR behaves in a more aggressive way to converge. It can be also seen that the jitter of TCMSR weakens and disappears after the algorithm has converged. This shows the fact that the global minimum would not suffer from the proposed TCMSR algorithm.

Global energy ratio of the network using MSR and TCMSR with a good fold-free starting point.
Specific case: with a random (bad) starting point
In the second experiment, we compare MSR and TCMSR with a purely random starting point. The same instantiation of sensor networks is used, as described in the first experiment. Different from the first experiment, a random guess on position assignment, which has a significant estimation error, is set as the starting points of both the two algorithms. Localization results are shown in Figure 5. It can be seen that MSR finally makes the localization converge to and gets trapped in a local minimum with a significant bias, implying that the traditional MSR fails in the localization. For a more visualized viewing, Figure 6 illustrates the localization errors in a two-dimensional view. The dot dash lines clearly indicate that MSR converged to a local minimum. However, the localization estimation cannot be refined anymore. This is because the resultant velocity acting on each node has become extremely small, although not all the component velocities are small. Table 1 shows a more detail of component velocities of an arbitrary node

Global energy ratio of the network using MSR and TCMSR with a purely random starting point.
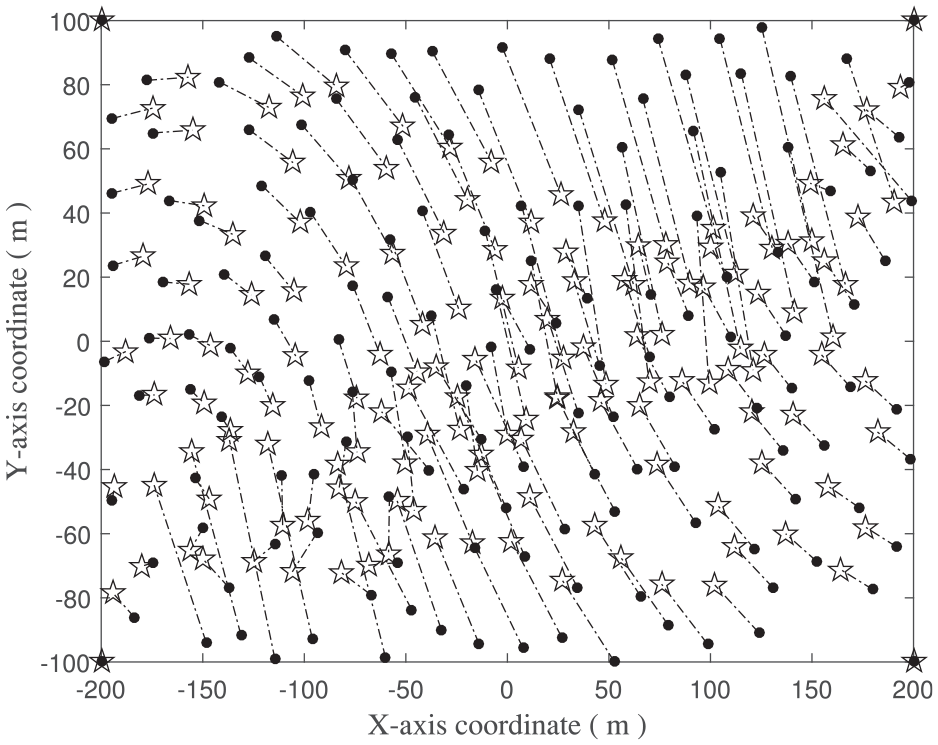
Localization errors using MSR. The dots and the stars denote true positions and estimated ones, respectively, and the dot dash lines indicate the estimation errors.
On the contrary, the proposed TCMSR can help the localization converge to the global optimum, since the localization error converges to zero successfully. This success is guaranteed by the effective mechanism, under which local minima can never stay stable. After enough time of iterations, the global minimum can be eventually achieved by using TCMSR.
Monte Carlo simulation
In the third experiment, we perform the Monte Carlo simulation for MSR and TCMSR, respectively. In total, 300 different sensor networks are generated by varying the number of ordinary nodes (
Results of the simulation present that the traditional MSR algorithm fails in about 60% of the localizations, showing a high sensitivity to network conditions and starting points. On the contrary, the proposed TCMSR algorithm can always achieve the global minimum for the localization in all the simulations, even starting from a purely random starting point (on the same scale of the correct assignment). The success rate using TCMSR is an exact 100%.
As a summary, the simulation shows that the proposed TCMSR algorithm can work not only with the fold-free starting point but also with the purely random starting point. Compared to the traditional MSR algorithm, TCMSR behaves better in achieving the global minimum, with a more effective and robust performance. Considering the fact that there is no simple way to ensure a good enough starting point, the proposed TCMSR algorithm shows a great advantage for practical localization problems.
Conclusion
This article deals with the distributed localization problem in wireless sensor networks. Traditional distributed algorithms for this problem are likely to suffer from the local-minima failures. Focusing on this issue, a fully distributed algorithm is proposed under a novel mechanism, where each individual node is allowed to computationally interact with a random subset of its neighbors for helping localizations escape from local minima. Theoretical analyses reveal that any local minimum of the localization will be unstable under the proposed algorithm, and that the global optimum would finally be achieved with probability 1 after enough time of iterations. Numerical simulations given at last have demonstrated the effectiveness of the algorithm.
Footnotes
Handling Editor: Amiya Nayak
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grants 61701498, 61605099, and 61703403, the Young Elite Scientists Sponsorship Program by CAST (2016QNRC001), the Youth Talent Program of Beijing High-level Innovation and Entrepreneurship under Grant G04070017, the National Key R&D Program of China under Grant 2018YFA0703800, and the Youth Talent Program of Beijing High-level Teachers under Grant 201704062. Co-Corresponding author should be addressed to all the authors.