
Abstract
Wireless sensor networks have been proposed for many location-dependent monitoring applications. Existing localization methods often suffer low accuracy and high energy consumption. In response to the above limitations, this article introduces a novel localization approach by virtue of a miniature unmanned aerial vehicle based on our previous IEEE 1851 project, which is named as unmanned aerial vehicle–assisted node localization. The localization process contains three stages, which are node image collection, non-occluded node localization, and occluded node localization, respectively. In the first stage, a unmanned aerial vehicle carrying Global Positioning System shoots the deployment area to collect node images. Then, in the non-occluded node localization phase, the convolutional neural network technique is employed to identify the nodes. And, their positions are determined through the graph matching or Bayesian model averaging approach. Finally, the localized non-occluded nodes start to act as the role of anchors. And, an improved received signal strength indicator–based algorithm is further designed to localize the occluded nodes. Extensive simulations are conducted to verify the effectiveness, in which the accuracy increases by 10%–30% compared with the state of the art methods. Moreover, we implement a prototype localization system with 49 CC2430 nodes and a miniature unmanned aerial vehicle. Results confirm its effectiveness for outdoor sensor networks.
Introduction
Wireless sensor networks (WSNs) integrated with sensor technology, embedded computing technology, wireless communications technologies, and distributed information processing technology can monitor, perceive, and acquire various environmental or object information. As an important branch of wireless measurement systems, WSNs have been widely adopted in many location-sensitive applications, 1 such as environment surveillance, 2 industry data collection, 3 and object tracking. 4
For the monitoring systems with sensor networks, we have ever proposed a layered reference model which consists of sensing layer, collection layer, management layer, and application layer.5,6 And, in the application layer, the IEEE 1851 standard is constructed for sharing the monitoring data. Giving continuity to that project, we further study the node localization problems in the sensing layer. That is because many data collection protocols are built on the assumption that the geographic positions of the sensor nodes are available. And, the monitoring data without the location information often make no sense.
Many excellent schemes have been proposed for node localization. Based on whether accurate ranging is required, there are basically two types of methods: (1) range-based localization schemes and (2) range-free localization schemes. Range-based localization schemes can obtain good localization accuracy but requires either ranging hardware or system calibration and environment profiling. Range-free localization schemes utilize simple sensing, such as wireless connectivity, 7 anchor proximity, 8 or localization event detection, 9 to localize nodes. These approaches are cost-efficient but exhibit low accuracy. Although localization plays an important role in measurement systems and has been studied extensively, it is still a challenging problem due to extremely limited resources available at each low-cost and tiny sensor.
Recently, the unmanned aerial vehicles (UAVs) are widely used for monitoring outdoor environment. Meanwhile, image processing techniques have rapidly developed with the emergence of deep learning algorithms. Realizing the newest technologies, we try to seek a novel image-based localization method instead of a sole network-based scheme to improve localization performance. In this article, a unmanned aerial vehicle–assisted node localization (UNL) approach is proposed, in which a miniature UAV carrying the Global Positioning System (GPS) and a image sensor is employed to assist localization. The localization process consists of three phases: node image collection, non-occluded node localization, and occluded node localization. In the first stage, node images are collected through the mobile UAV in the deployment region. Image recognition techniques are then used to precisely localize sensor nodes captured by the UAVs in the second stage. The localized nodes are then updated to the anchor nodes in the last stage. Thus, classical location algorithms, such as Amorphous, 10 approximate point-in triangulation (APIT), 11 and distance vector-hop (DV-hop), 12 can be adopted to determine node locations that have not been photographed. Specifically, we propose an improved received signal strength indicator (RSSI) method to localize nodes that have not been photographed. In contrast, the main contributions of this article are as follows:
A novel localization scheme is proposed based on image recognition and processing techniques. To the best of our knowledge, it is the first image-assisted node localization for WSNs. With little overhead, the proposed design can be conveniently applied as a transparent supporting layer for many state-of-the-art schemes to achieve better positioning accuracy.
We propose a novel method to evaluate the parameters of Log-normal Shadowing model for received signal strength (RSS) sensing, which fully utilizes the location information of known nodes and thus can improve the localization accuracy of the RSSI-based localization algorithm.
The performance of the proposed design is evaluated by extensive simulations, a prototype localization system with 49 nodes, and a miniature UAV. Results verify the effectiveness of the localization scheme.
This article is organized as follows. Section “Related work” describes related work for localization in WSNs and image recognition techniques. Section “Network model and definition” illustrates the problem formulation for the proposed design. Section “System design” presents the main design with detailed algorithm analysis. Section “Simulation evaluation” evaluates the algorithm in realistic settings and compares it with other localization algorithms. Section “A prototype localization system” introduces a prototype localization system. Section “Conclusion” concludes the article and provides future work direction.
Related work
In this section, we mainly elaborate and discuss the research development of classical localization technologies, as well as image processing technologies.
Existing sensor localization schemes can be divided into two categories: (1) range-based localization schemes and (2) range-free localization schemes. Range-based schemes mainly contain angle of arrival (AOA), 13 time of arrival (TOA), 14 time difference of arrival (TDOA), 15 RSSI, and so on. The AOA method obtains nodes’ locations based on the angle from the received signal. The TOA and TDOA methods calculate the distance by measuring the propagation speed and time. The RSSI approach utilizes the loss of power in communication module to estimate the distance. In conclusion, the above algorithms perform well by virtue of additional and costly hardware, while they are not suitable for large-scale systems. On the contrary, range-free methods, such as APIT 11 and DV-Hop, utilize distance relationship with beacon nodes instead of measuring actual distances or angles. For instance, APIT estimates the node position by means of dividing the localization space into triangular regions. The most possible region where a node resides can be acquired by combining multiple locations of beacon nodes. In the DV-Hop 12 scheme, beacon nodes broadcast their position information throughout the entire network where each node is equipped with a running hop count. The anchor positions, the hop count, and the average distance per hop are the essential information for nodes to estimate their locations. In those systems, only a small quantity of anchors are required, which significantly reduces the system cost. Range-free methods make use of the proximity information for pursuing a low-cost design. 16 To achieve a good accuracy, a high anchor density is often required, which is also impractical for large-scale systems.17,18
Recently, researchers have proposed several novel location schemes based on channel state information (CSI). 19 As a substitute for MAC layer RSSI, fine-grained PHY layer CSI has gained increasing attention because of its frequency diversity at the granularity of Orthogonal Frequency Division Multiplexing (OFDM).20–22 In addition, CSI is an informative signature that benefits non-invasive human detection. This scheme has been employed in non-invasive motion detection, entity localization, crowd counting, and walking activity recognition. However, the extraction of CSI is mainly available on few Wi-Fi devices, which is also impractical for large-scale sensor networks.
Image processing, as a key component in this article, is an interesting field because it improves pictorial information for human interpretation. Image processing deals with image acquisition, image enhancement, image segmentation, feature extraction, and image classification. Image recognition has rapidly developed using convolutional neural network (CNN). 23 This network can simulate the human brain; that is, it processes information hierarchically and obtains direct image features from the original pixel of the image. Krizhevsky et al. trained an eight-layer deep model ImageNet database and won the championship in the famous ImageNet image classification match using this model.24,25 The recognition accuracy rate of the proposed model increased by 10% compared with that of the previous methods. In addition, literature 26 pointed that they achieved 4.94% top 5 test errors on the ImageNet 2012 classification data set; this result is the first to surpass human-level performance on visual recognition challenge.
Realizing the limitations of previous works and the rapid development of image processing technologies, this article presents the idea of image-assisted localization. Acting as a transparent supporting layer, our design can effectively improve the system accuracy of state-of-the-art methods with little extra cost.
Network model and definition
A network model in which sensors are randomly deployed is considered in this article. These sensors are located using image processing techniques with the mobile UAV (can be defined
Non-occluded node. Sensors can be captured by
Occluded node. Sensors are blocked and thus cannot be captured by
Valid picture. The image containing sensors is considered as a valid picture. The set of valid pictures is denoted by
Invalid picture. The image that does not have any sensor is regarded as an invalid picture. The set of invalid pictures is represented by
Real graph. Let the whole real graph be
Virtual graph. Let

Wireless sensor network: (a) whole real graph
System design
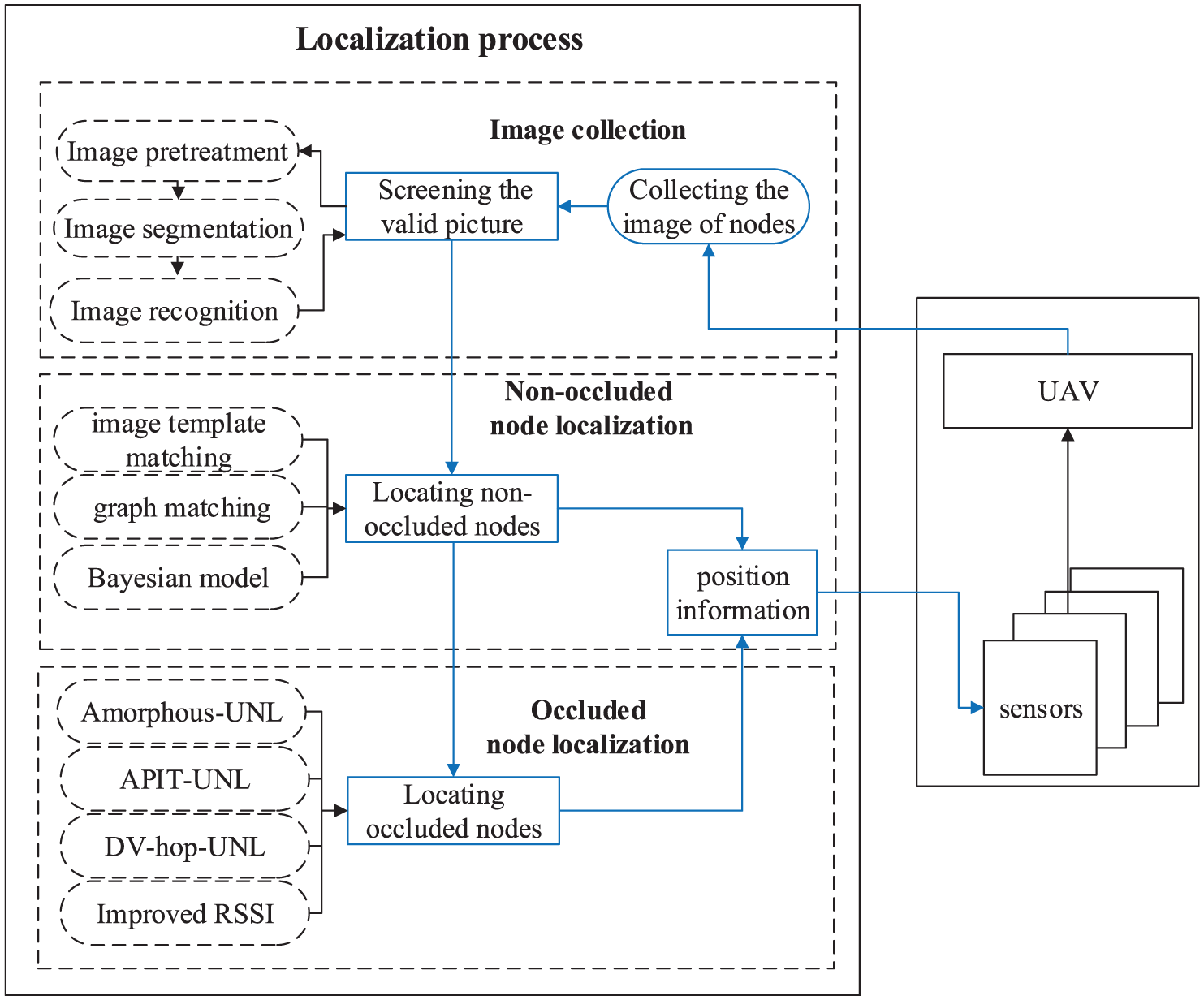
The overview of the localization system is shown in Figure 2, which consists of three phases: image collection, non-occluded node localization, and occluded node localization:
Step 1. Image collection—In the node deployment area, a UAV
Step 2. Non-occluded node localization—After screening the valid picture, we locate non-occluded nodes by image template matching. By utilizing image template matching, we obtain the coordinates of the nodes in the image. These coordinates are converted into the actual position coordinates because the location information of the pictures taken is known; the coordinate conversion ratio can be calculated by the height of the picture taken and the camera pixels of the UAV
Step 3. Occluded node localization—Through the last step, the non-occluded nodes are precisely localized and they can be updated to the anchors, leading to the large proportion of the anchors in the network. In this case, we can directly use classical localization algorithms, such as Amorphous, APIT, or DV-hop to localize occluded nodes. For this specific network with a large proportion of anchor nodes, we propose a method for calculating the parameters of Log-normal Shadowing model using the known location information of the non-occluded nodes. This method improves the localization accuracy of the RSSI localization algorithm. The improved RSSI algorithm can be used to accurately locate occluded nodes.
Localization system overview.
Image collection
The scheme for image collection is designed to ensure that the UAV
The size of the picture set P is very large. To ensure the accuracy of localization, we develop a method for screening the valid picture set

Valid picture: (a) original image, (b) enhanced image, and (c) divided image.
Non-occluded node localization
After screening the valid picture, we localize non-occluded nodes by the following steps. First, the positioning coordinates of the non-occluded nodes are obtained by image template matching. Second, the accuracy of the positioning coordinates is analyzed. Third,we introduces the methods for refining the positioning coordinates, which are then matched to the corresponding sensors by graph matching method or Bayesian model averaging approach.
Obtaining the positioning coordinates of non-occluded nodes
Template matching is used in digital image processing to determine small parts of an image that matches a template image. This technique can be used in manufacturing as part of quality control, mobile robot navigation, or image edge detection.
28
Image template matching can be employed to obtain the pixel coordinate

where

Two coordinate systems.
Location error analysis
This section analyzes the error of non-occluded nodes localized by image template matching. Suppose the absence of error in the GPS device of the UAVs; only the height of the UAV can affect the accuracy of localization because it affects the coordinate conversion factor. Although the height of the UAV is set to
Refining the location of non-occluded nodes
The shooting interval of the UAV is short; thus, the same node may appear to be repeated in different pictures, resulting in repetition of the position of the same node. To solve this problem, we use an iterative refinement method that can handle duplicate location information. This method aims to use the characteristic at which the positioning accuracy of the picture is very high to screen repeated position coordinates. We then calculate the mean of the repeated position coordinates. First, let

If
Matching with the corresponding sensors
We obtain a position coordinate set L, which represents the location of non-occluded nodes. However, the sensor represented by each coordinate remains unknown. In this section, we discuss the problem in two different cases. Case 1—the number of coordinates in the set L is equal to the number of sensors in the network; that is, each node is photographed by
Case 1
Under the condition without any occluded nodes, graph matching is used to match the node with the corresponding sensors. Using the precise position coordinates of the non-occluded nodes, we obtain the distance among the non-occluded nodes to construct a real graph



where P is the
Case 2
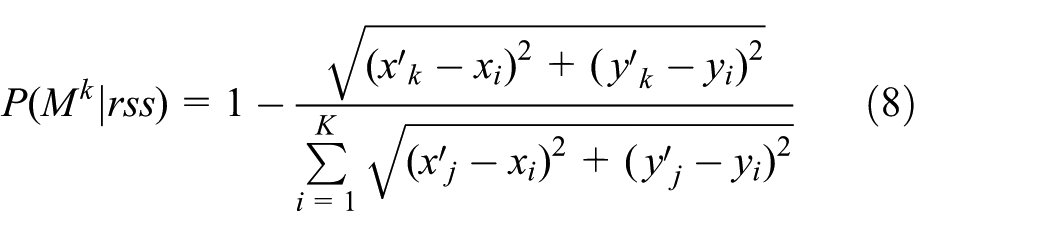
Some occluded nodes exist in the sensor network. In this case, the UAV

where

where
where
Occluded node localization
Using the above-mentioned steps, the non-occluded nodes can be precisely positioned. In this section, we introduce methods for localizing these occluded nodes.
In this stage, non-occluded nodes can be updated to anchor nodes, resulting in large proportion of anchor nodes in the network. As such, we can directly use classical localization algorithms, such as Amorphous, APIT, and DV-hop, to localize the occluded nodes. These algorithms can be named as Amorphous-UNL, APIT-UNL, and DV-hop-UNL, respectively. Specifically, we propose a novel method for improving RSSI method, which can be used to calculate the parameters of Log-normal Shadowing model using the known location information of all anchors. Generally, the common used Log-normal Shadowing model is as follows

In equation (9), the key point is to choose appropriate parameters
Supposing

Thus, we need the minimum mean square deviation between
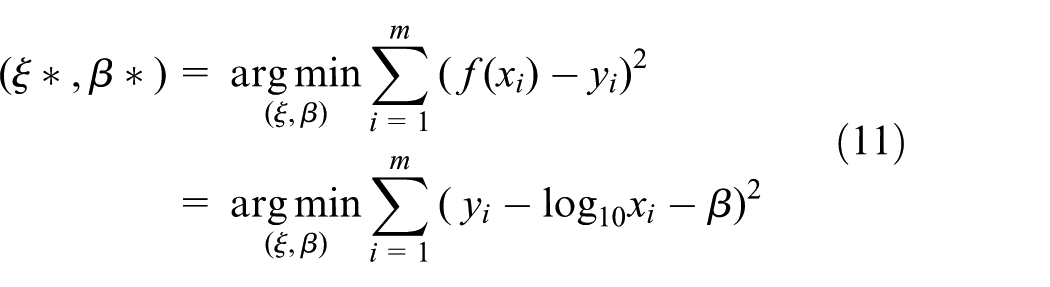
The problem is transformed to calculate


Making equations (12) and (13) equal to 0, we obtain the optimal closed form of
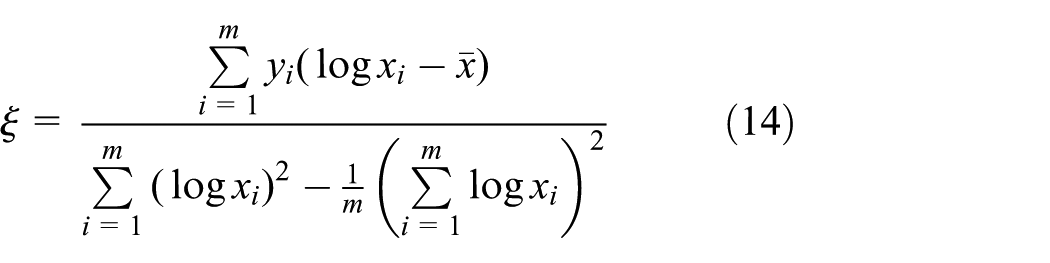

where
We can utilize the obtained optimized model parameters to calculate the distance between the occluded nodes and the known nodes. And, the localization process is performed by utilizing the multilateration method.
Simulation evaluation
In this section, extensive simulations are constructed to evaluate the proposed design. We model the area of interest as a square map without holes where radio cannot reach. Unless mentioned otherwise, Table 1 lists the default simulation configuration for the following sections. All the statistics reported were averaged over 100 runs to obtain high confidence level. In addition, the localization error LE is defined as follows

where n is the number of all sensor nodes,
Default configurations for simulation.

Localization performance of non-occluded nodes
We evaluate the localization performance of non-occluded nodes. Figure 5(a)–(c) represents the localization error when GPS errors are 0, 3, and 5 m, respectively. Figure 5(a) shows the lack of error when the GPS device does not have any error in three different image template matching methods including adjustment, correlation coefficient, and normalized cross-correlation methods. Figure 5(b) and (c) shows that the localization error of the non-occluded nodes is approximately equal to the GPS error. Thus, the localization performance of the non-occluded nodes is very good when the GPS device of the UAV exhibits satisfactory localization performance.
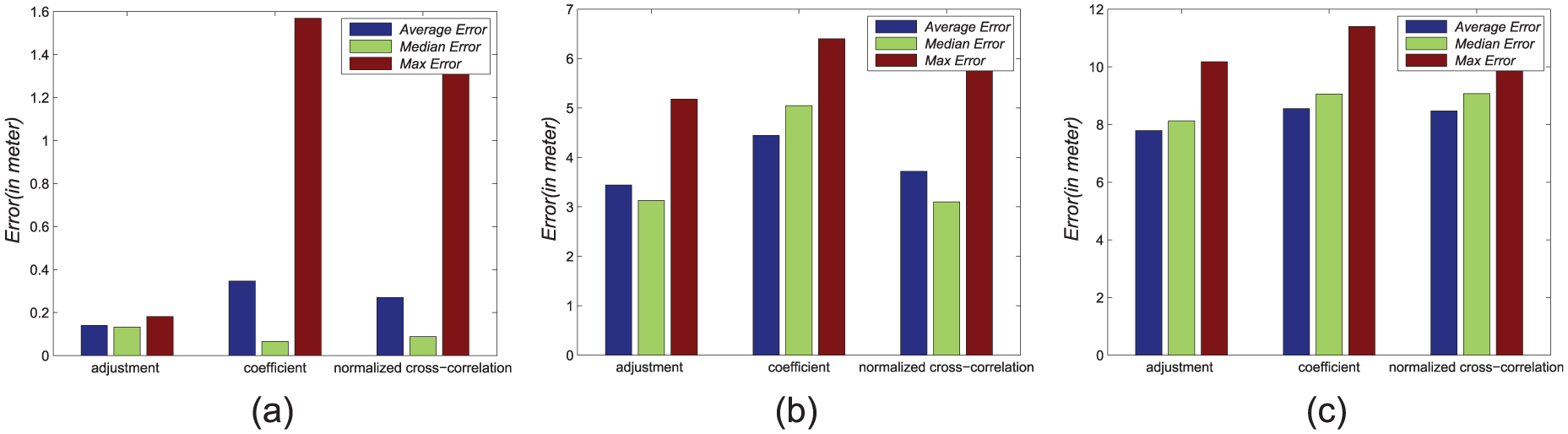
Localization results of non-occluded node in GPS error: (a) 0 m, (b) 5 m, and (c) 10 m.
Performance of graph matching
In this section, we evaluate the performance of graph matching. The distance calculated using the Log-normal Shadowing model may have some errors, which will affect the performance of graph matching. To test the robustness of graph matching method, we set different distance errors, ranging from 1 to 10 m. As shown in Figure 6, the maximum and mean accuracy can maintain more than 90% despite the presence of error in the estimated distance. Thus, graph matching exhibits the robustness and can be used to localize the ndoes.

Performance of graph matching.
Performance of regression Log-normal Shadowing model
Here, we evaluate the impact of parameters
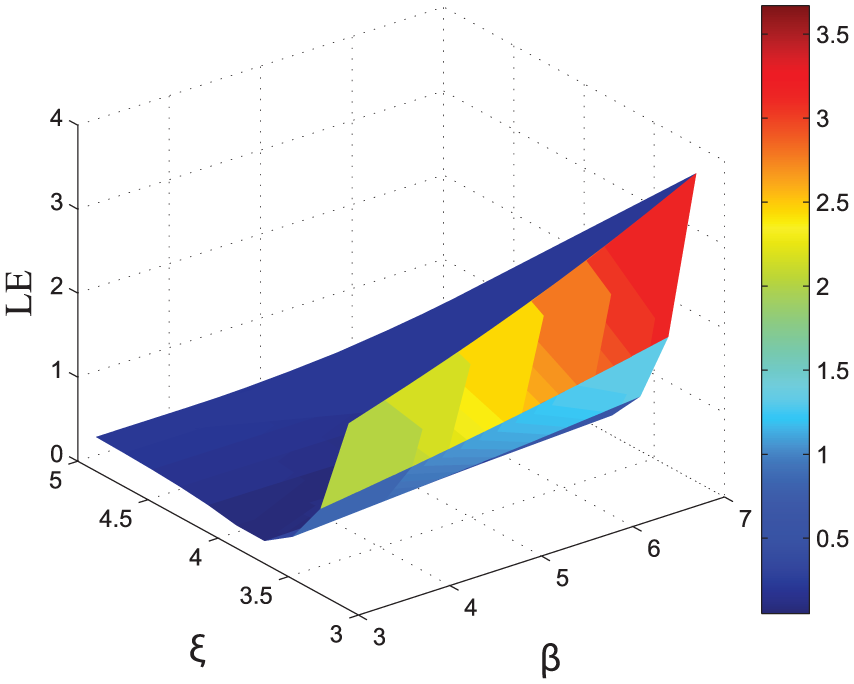
Effect of parameters.
To prove that the proposed method can correctly calculate the model parameters, a verification simulation is performed in different cases where the known data show different error levels. First, we generate 150 distance values given the model parameters. Then, the distance values are added to the error, which obey the uniform distribution on
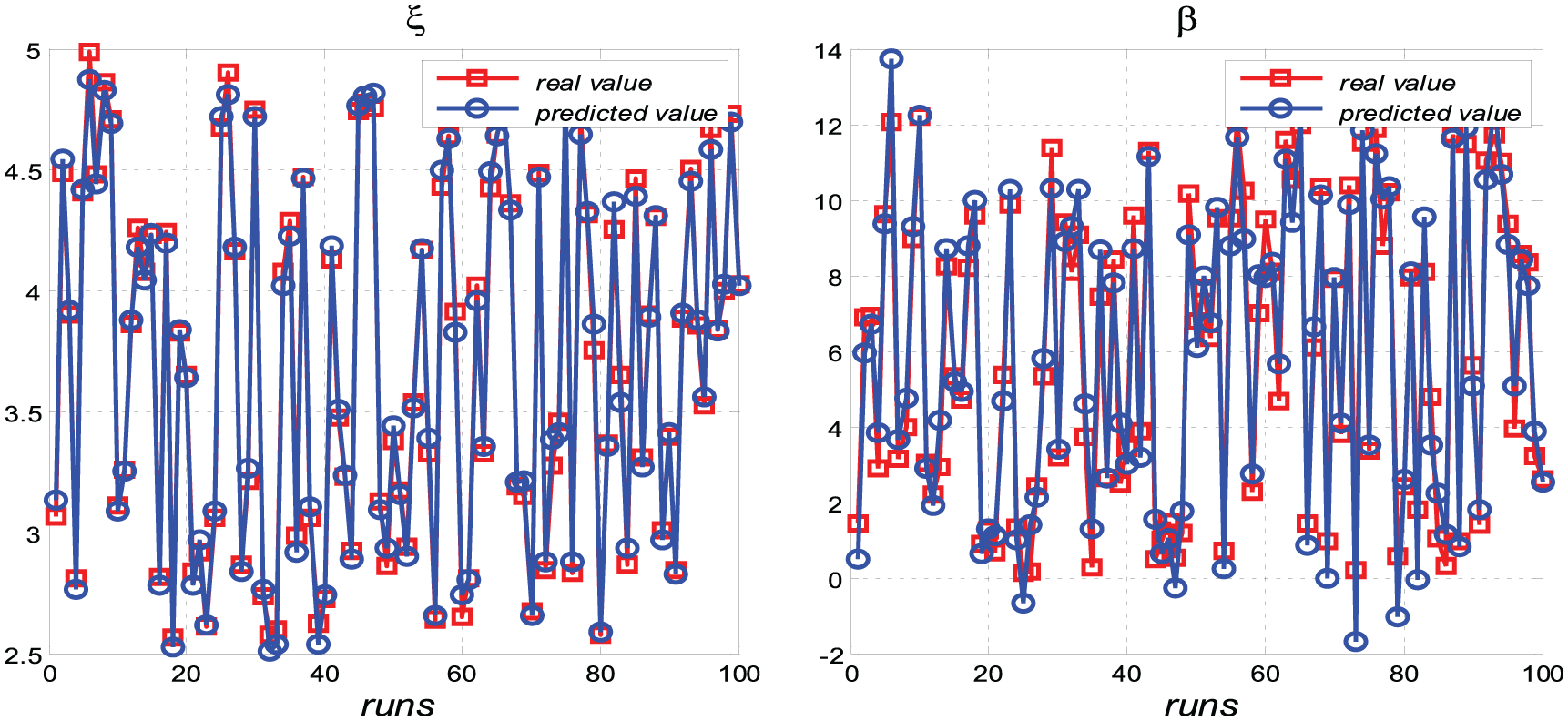
Predicted result of parameter with
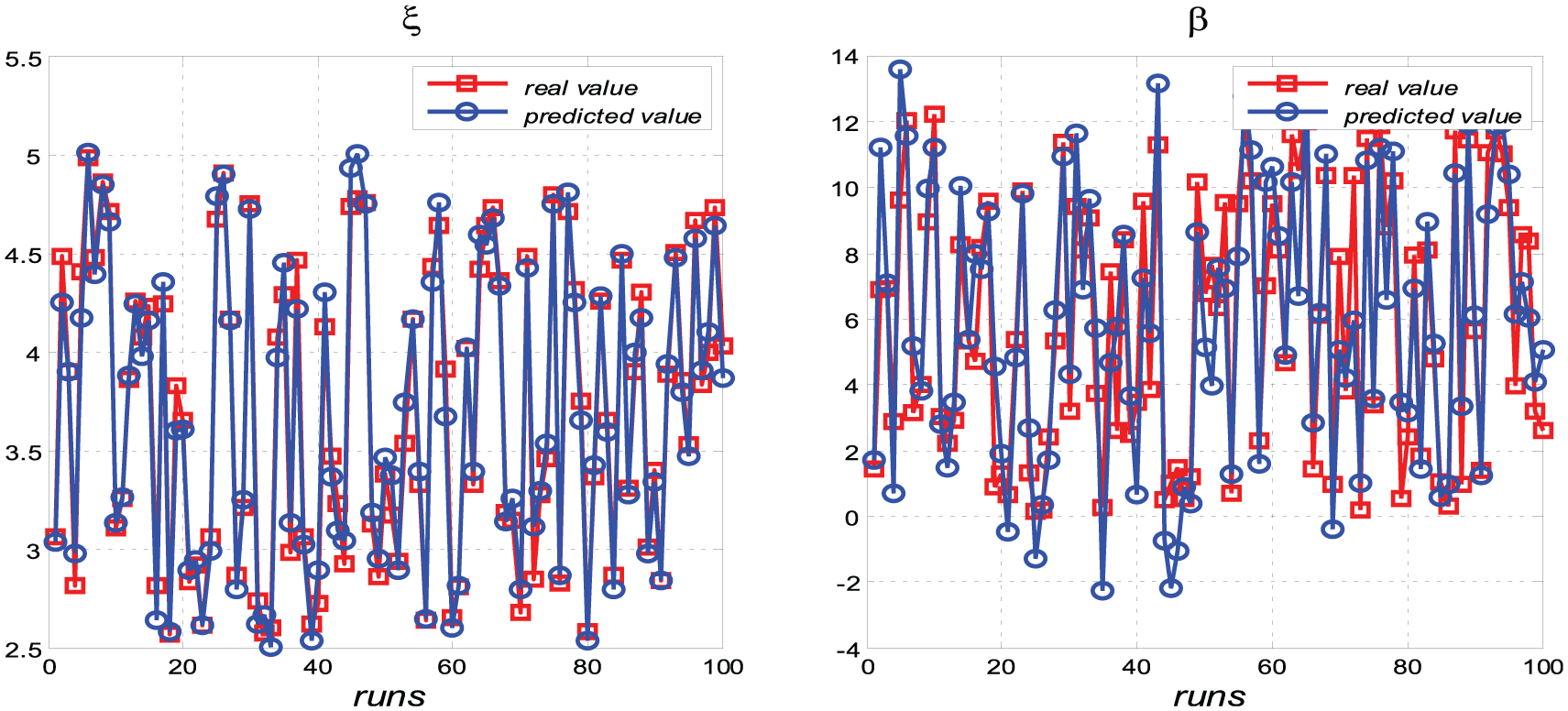
Predicted result of parameter with
Comparison of localization results
To compare the localization results, we set the rate of anchors to be

Comparison of localization results: (a) Amorphous vs Amorphous-UNL, (b) Dv-hop vs Dv-hop-UNL, (c) APIT vs APIT-UNL, and (d) comparison of UNL-embedded methods.
Effect of occlusion rate
Occlusion rate is the ratio of occluded nodes to the total nodes. This rate can affect the localization performance of the proposed algorithm. To determine the effect of occlusion rate, we set different occlusion rates from 0.1 to 0.7. We use the improved RSSI localization method to localize occluded nodes. Figure 11 shows that the positioning error increases with increasing occlusion rate. At occlusion rate of 0.7, the location accuracy of the proposed algorithm is higher than that of the other algorithms. The occlusion rate rarely exceeds 0.7 in the actual situation.

Effect of occlusion rate.
Analysis of energy consumption
In our localization scheme, the energy consumption of sensors can be effectively reduced by UAV-assisted method. Suppose that there are n nodes in the network, which contains m non-occluded nodes. In the non-occluded node localization phase, non-occluded nodes have scarcely any energy consumption as that they are located by UAV. Thus, for our localization scheme, the node energy consumption can be reduced by
A prototype localization system
System setup
As shown in Figure 12, we place 49 CC2430 sensor nodes in a

Experiment scene.
Localization performance
Figure 13 depicts the node recognition accuracy, and results show that the accuracy is more than 90% when the flying height of the UAV is less than

Node recognition accuracy.

Results of localization.

Predicted result of parameter.
Conclusion
To improve the localization accuracy and reduce energy consumption for WSNs, this article introduces a UAV-assisted accurate localization approach, which employs image processing techniques to precisely localize sensor nodes captured. An improved RSSI algorithm is further proposed to localize the remaining sensor nodes. Extensive simulations indicate that the proposed localization scheme is robust to realistic settings. Compared with traditional localization algorithms, the proposed design exhibits increased accuracy of about 10%–30%. In addition, we implemented our design with 49 CC2430 nodes and an aerial photography. The proposed localization scheme exhibits robustness, expansibility, and accuracy of positioning. Future work should extend the application and practicability of UNL.
Footnotes
Handling Editor: Qi Han
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported, in part, by the Fundamental Research Funds for the Central Universities (grant no. 2017XKQY080).