
Abstract
Managing conflict in Dempster–Shafer theory is a popular topic. In this article, we propose a novel weighted evidence combination rule based on improved entropy function. This newly proposed approach can be mainly divided into two steps. First, the initial weight will be determined on the basis of the distance of evidence. Then, this initial weight will be modified using improved entropy function. This new method converges faster when handling high conflicting evidences and greatly reduces uncertainty of decisions, which can be demonstrated by a numerical example where the belief degree is raised up to 0.9939 when five evidences are in conflict, an application in faulty diagnosis where belief degree is increased hugely from 0.8899 to 0.9416 when compared with our previous works, and a real-life medical diagnosis application where the uncertainty of decision is reduced to nearly 0 and the belief degree is raised up to 0.9989.
Keywords
Introduction
Information fusion technology is a powerful tool to analyze and handle multi-source uncertain information comprehensively. Dempster–Shafer (D-S) theory of evidence, one kind of information fusion technology, is quite popular with academics to reason with uncertainty information in intelligent systems. D-S theory is presented first in 1967 by Dempster 1 and then improved by Dempster’s student, Shafer. 2 Compared to traditional probability theory, D-S theory can present and handle uncertainty better. Now this theory has been applied widely and successfully in many fields, such as decision-making,3–6 target recognition,7–9 supplier selection,10,11 reliability analysis,12,13 and optimization under uncertain environment.14,15
Though D-S theory has plenty of advantages, there are still several basic and popular problems. Among those problems, one of the most important is that D-S theory will fail to fuse highly conflicting evidences and will cause counter-intuitive results.16–19 There are two main directions to deal with this kind of problem. One is to pre-process the bodies of evidence20,21 and the other is to modify the combination rule.22,23 Generally, in the study of Murphy,
22
a simple averaging approach is presented, where all bodies of evidence are seen equally important. However, this idea is not reasonable in practice. In 2004, Deng et al.
23
proposed a weighted combination rule which combines the weight average of the masses for
In this article, a novel weighted evidence combination rule based on evidence distance and improved entropy function is proposed. This newly proposed approach mainly consists of two steps. First, the initial weight will be determined on the basis of the distance of evidence. Then, this initial weight will be modified using improved entropy function. A numerical example and an application demonstrate the efficiency and effectiveness of this new method.
The remaining article is organized as follows. Section “Preliminaries” starts with preliminaries about D-S theory, evidence distance, and improved belief entropy. In section “The proposed method,” the proposed method is presented. Sections “Experiment” and “Application” give a numerical example and an application in faulty diagnosis. In section “Real-life medical application,” we show a real-life medical diagnosis application. Finally, a comprehensive conclusion is made in section “Conclusion.”
Preliminaries
In this section, some preliminaries are briefly introduced.
Basics of evidence theory
D-S theory of evidence is used for dealing with uncertainty information as an efficient mathematical model in intelligent systems. 1 In 1967, the definition of D-S theory was proposed by Dempster, and then his student Shafer 2 developed this theory in 1976.
Let


If

where
An example of combination rule.

Example 1
Suppose that the frame of discernment


In the frame of discernment


Given a proposition

The plausibility function of A, denoted as Pl(A), is defined as follows



Here, we give an example about belief function and plausibility function and show its results in Table 2.
An example of Bel and Pl.

Example 2
Assume that
But the classical Dempster’s combination rule is not efficient all the time. When BOEs are in high conflict, illogical results will be generated.25–27
Nowadays, there are mainly two kinds of methodologies. One is to modify the combined rule, and the other is to pre-process evidences. Smets’
28
unnormalized combination rule, Dubois and Prade’s
29
disjunctive combination rule, and Yager’s
20
combination rule belong to the first category. These three alternatives mentioned above are examined and they all proposed a general combination framework. To pre-process data, Murphy’s
22
simple average and Deng et al.’s
23
weighted average are popular. In the study of Murphy,
22
a simple averaging approach of the primitive BOEs is proposed. And in that case, all BOEs are seen equally important, which is unreasonable in real life. From the study of Deng et al.,
23
we can get a better combination result by combining the weight average of the masses for
Evidence distance
With the wide application of D-S theory, the study about the distance of evidence has attracted more and more interests. 30 The dissimilarity measure of evidence can represent the lack of similarity between two BOEs. Performance evaluation, 31 reliability evaluation, 32 conflict evidence combination, 23 target association, 33 and lots of methods of evidence distance are brought up as an appropriate measure of the difference. And several definitions on distance in evidence theory are also proposed, such as Jousselme et al.’s 34 distance, Wen et al.’s 35 cosine similarity, Ristic and Semts’ 33 transferable belief model (TBM) global distance measure, and Sunberg and Rogers’s 36 belief function distance metric. Among those definitions on the distance of evidence, the most frequently used is Jousselme et al.’s 34 distance.
Jousselme et al.’s
34
distance is identified on the basis of Cuzzolin’s
37
geometric interpretation of evidence theory. The power set of the frame of discernment

where
Example 3
Assume there are two BOEs,


The value inside the BOE vectors

It follows,

Improved belief entropy
Uncertainty is widespread in universe.38–42 If a probability assignment p is provided, we can apply Shannon’s 43 entropy to measure its uncertainty

But if a BPA is given, there is no way to measure that uncertainty based on some other main entropies listed in Table 3.
Some main entropies to measure uncertainty.

As for such a reason, Deng’s 50 entropy is presented to measure the uncertainty of BPA, which is a more significant tool to manage uncertainty than Shannon’s 43 entropy. Deng’s entropy can deal with the uncertainty represented not only by BPA but also by probability distribution. In other words, Deng’s entropy is the generalization of Shannon’s entropy.51–54
Deng’s entropy can be denoted as follows

where

However, there is a big shortcoming of Deng’s entropy that it cannot effectively quantify the difference among different BOEs which are assigned by the same mass value. For example, there are two BOEs, S1 and S2, as follows


According to equation (12), the uncertainty measures with Deng’s entropy are, respectively,
The improved belief entropy is defined as follows

where
Still for the two BOEs,
An example of the comparison of Deng’s entropy and improved entropy function is given and the results are seen in Table 4.
An example of Deng’s entropy.

Example 4
Assume that





The proposed method
We follow the methods of Wang et al.
55
Suppose we collect n independent BOEs, denoted as

where
Determining initial weight based on distance function
The evidence distance function is shown in equation (10). Intuitively, the less the distance between two BOEs, the more the similarity. So, the similarity measure

Then, the support degree of a BOE

Next, we could obtain the credibility degree of

Actually, the credibility degree
Modifying initial weight based on improved entropy function
Suppose that if one BOE
Step 1. Compute the uncertainty measure denoted as

where
Step 2. Modify the initial weight


Step 3. So, the weighted averaged BOE denoted as

Finally, the classical Dempster’s
1
rule is utilized to combine
Experiment
In this experiment part, we provide a numerical example to demonstrate the efficiency and effectiveness of this newly proposed novel weighted evidence combination rule.
Example 5
In a multisensor-based automatic target recognition system, suppose that the frame of discernment






After calculating through the first step of our proposed method, the credibility degree, that is, the initial weight of each BOE, can be obtained. All results are shown in Tables 5 and 6.
Distance measure between BOEs.

Initial weight determined by distance function.
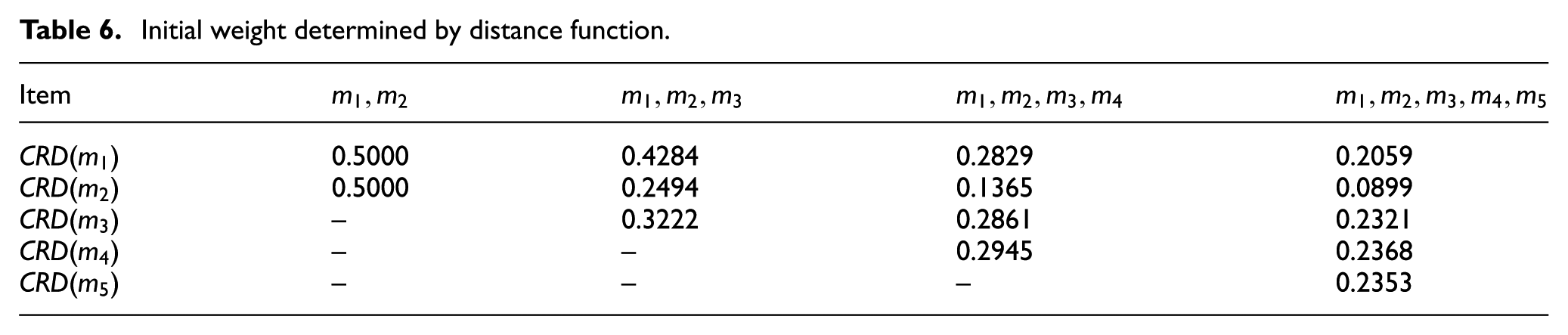
Then, the initial weight generated will be modified by the improved entropy function to get the final weight of each BOE,
Uncertainty measure of each BOE.

Modified weight determined based on improved entropy function.
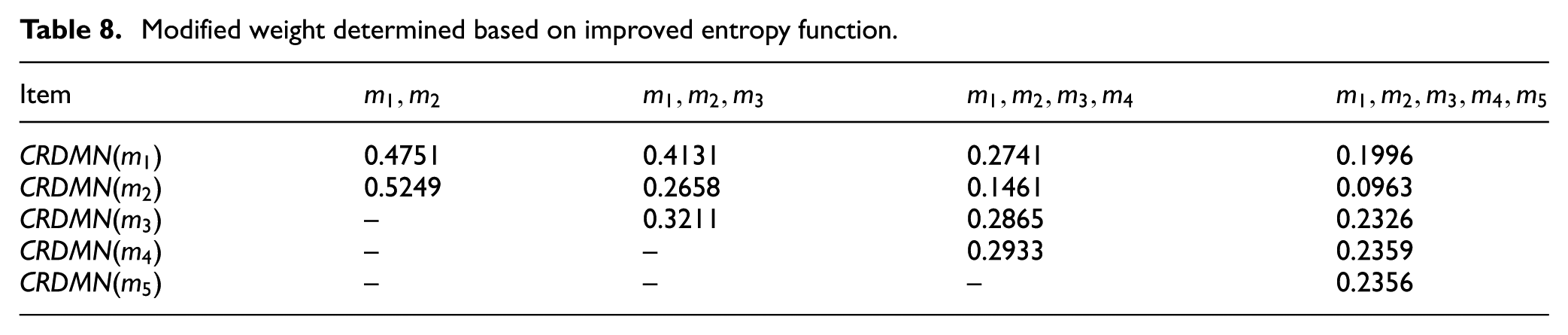
Next, by replacing
Results of WAM(m).

Final BPAs calculated by the newly proposed approach.

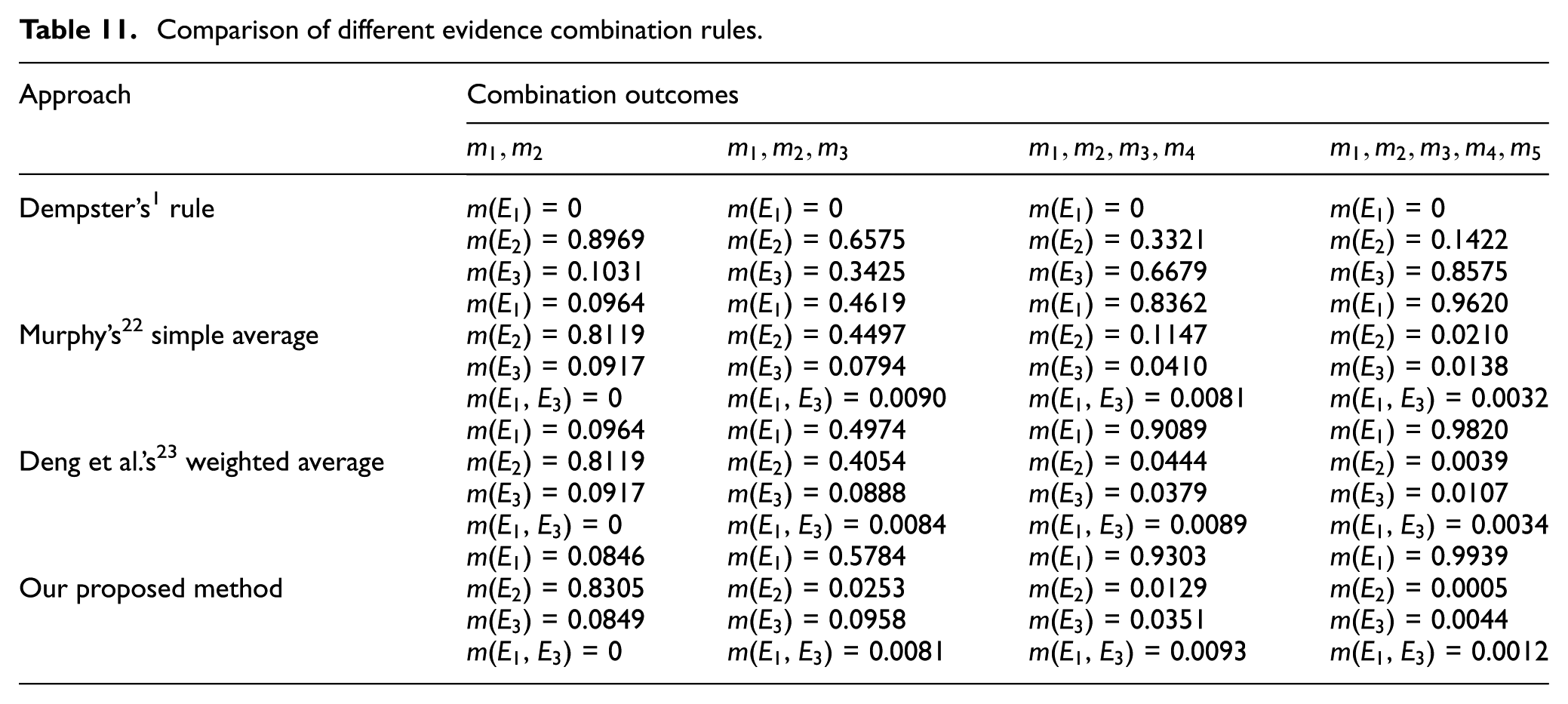
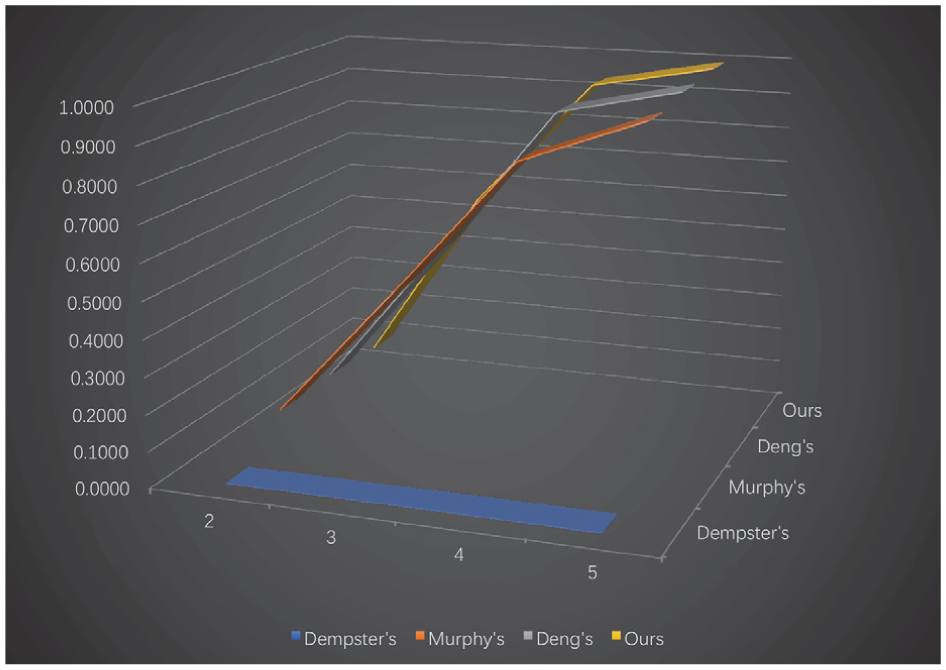
For a better show of the efficiency and effectiveness, we do a comparison with other different combination rule. The comparison results are shown in Table 11 and Figures 1–4.
Comparison of different evidence combination rules.
Outcome of m(

Outcome of m(

Outcome of m(

Outcome of m(
As shown in Table 11 and Figures 1–4, when evidences are in high conflict, the classical Dempster’s combination rule will produce counter-intuitive results which do not reflect the truth and so it is useless in that case. However, although with incremental BOEs, Murphy’s 22 simple averaging and Deng et al.’s 23 weighted averaging can give relatively reasonable results, their results are all inferior to those of our newly proposed method. In addition, among these existing methods that we compare, the convergence of ours is best. That is mainly because of using evidence distance function and improved entropy function, the effect of credible evidence is strengthened extremely, and the “bad” evidence has less influence on the final combined results.
Application
Just like our previous work,
27
we still apply our new method to the application of fault diagnosis. And the example is the same as that of our previous work.
27
Now, a machine has three gears
Prior information of evidences

Similarly, we still consider two kinds of sensor reliability, the static one
First, we could get the results of static reliability
Static reliability of evidences

Then, we could get the results of dynamic reliability
Initial weight determined in application.

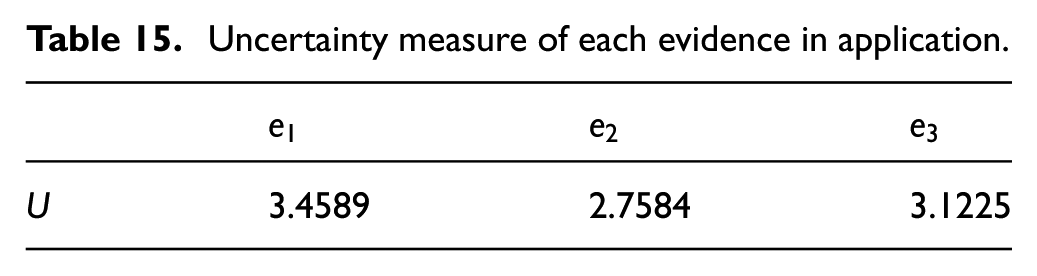
Uncertainty measure of each evidence in application.
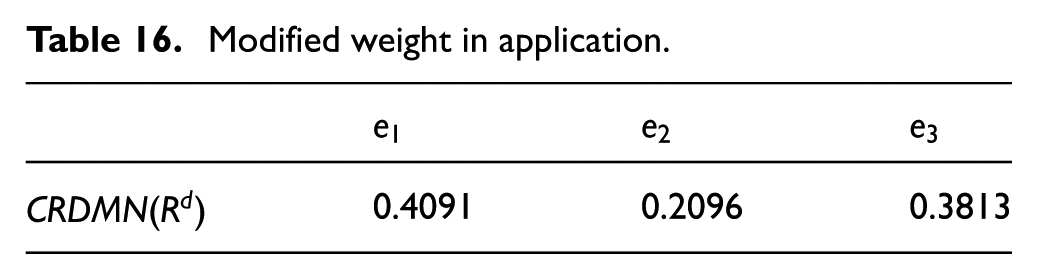
Modified weight in application.
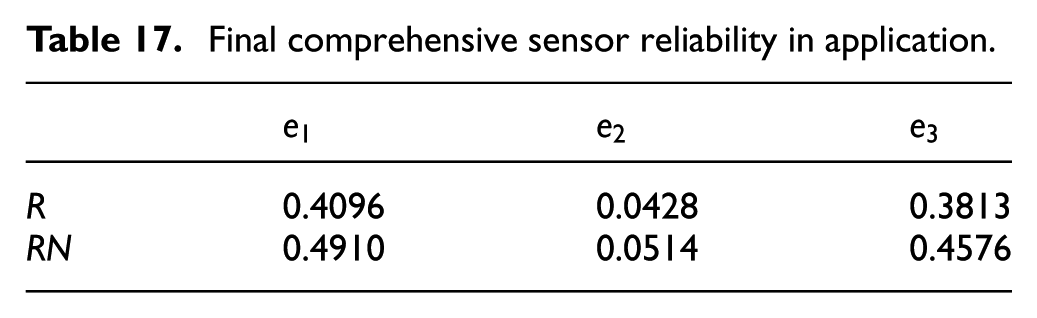
Next, calculate the final comprehensive sensor reliability R and then normalize it which is denoted as RN. The results are shown in Table 17.
Final comprehensive sensor reliability in application.
Finally, modify BPAs with comprehensive sensor reliability RN to get

Final results in application.

As seen from Table 19, based on our latest approach, the belief degree of the fault
Comparison results in application.

Real-life medical application
In this section, we also apply our proposed methodology to one real-life medical diagnosis application, which demonstrates adequately the priority of our approach compared with other recent works. Note that this example of the application section is cited from Li et al. 57
Suppose that there are a total of four diseases, denoted as
Here, we have a patient named Jason. Jason got three symptoms—fever, running noise, and facial pain: What a doctor should do now is to find out the most suitable diagnosis based on Jason’s symptoms: history, physical examination, and laboratory investigation. To deal with such a problem, we consider (F, p) and (G, B). There are four diseases {
Initial mass function of nine pairs of symptom and decision-making tool with respect to four diseases.

Then, on the basis of our newly proposed method, first we can get the initial weight from
Distance measures between pairs.

Initial weight determined in real-life medical application.

Next, the initial weights will be modified by our improved entropy function, which results in final weights of each pair (BOE)
Uncertainty measure of each evidence in real-life medical application.

Modified weight in real-life medical application.

Finally, replacing

Belief measure of each alternative

As shown in Table 27, the final ranking order of all alternatives is
Finally, we make a comparison between our newly proposed method and some recent methods in the studies of Wang et al. 55 and Li et al. 57 The comparison results shown in Table 28 show that first, this newly proposed approach is as feasible as others; second, our method has better performance with respect to enhancing belief degree and reducing uncertainty of decision, which makes a great contribution to the medical diagnosis field.
Comparison of recent methods in real-life application.

Conclusion
In this article, a novel weighted evidence combination rule based on improved entropy function is presented. This newly proposed approach preserves all the desirable properties of Murphy’s 22 and Deng et al.’s 23 work. Besides, through comparison with other methods, an application in fault diagnosis, and a real-life medical diagnosis application, our proposed approach converges faster when handling high conflicting evidences, and so it can help experts do take better and faster decision.
Footnotes
Handling Editor: Pietro Manzoni
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the research and construction of self-regulated learning platform of software technology specialty in higher vocational colleges (no. KJ1502901), and the research and demonstration application based on MOOCS independent learning platform of training support technology for Industry 4 talents (no. GZTG201605).