
Abstract
Fault detection based on the vibration signal of an engine is an effective non-disassembly method for engine diagnosis because a vibration signal includes a lot of information about the condition of the engine. To obtain multi-information for this article, three vibration sensors were placed at different test points to collect vibration information about the engine operating process. A method combining support vector data description and Dempster–Shafer evidence theory was developed for engine fault detection, where support vector data description is used to recognize the data from a single sensor and Dempster–Shafer evidence theory is used to classify the information from the three vibration sensors in detail. The experimental results show that the fault detection accuracy using three sensors is higher than using a single sensor. The multi-complementary sensor information can be adopted in the proposed method, which will increase the reliability of fault detection and reduce uncertainty in the recognition of a fault.
Keywords
Introduction
The vibration signal from an engine body includes a lot of information about the engine operating process, and this signal is used as the fault detection tool for feature extraction and pattern recognition. One conventional method of fault detection from vibration analysis is to collect the vibration signals from the engine cylinder using an acceleration sensor, and a mathematical method is introduced for signal processing, feature extraction, and pattern recognition to isolate the faults and evaluate the condition of the engine.1–5 However, the vibration signal in the transfer process has a certain attenuation, so it is not sufficient to evaluate the technical condition of the engine using the engine vibration information from one vibration sensor.
Related work
To detect faults, some methods for obtaining information fusion from different sensor sources have recently been developed. For example, MS Safizadeh and SK Latifi 6 detected bearing failure using an accelerometer and a loading cell, and Z Li et al. 7 fused the information from the vibration and wear particle analysis to enhance early fault detection. However, for practical application of fault detection, the device is costly, and it is not easy to achieve online detection in a vehicle; hence, it is difficult to collect wear particle information. W Cao et al. 8 proposed an online visual ferrograph (OLVF) and performance monitoring sensors to evaluate engine wear, but the weight of the different sensors is difficult to determine, and the condition factor may influence the monitoring results.
In fusion methods, some researchers have proposed using an SVDD (support vector data description)-based algorithm for the fault diagnosis of a mechanical equipment system. Z Jiang et al. 9 focused on one-class classification of mechanical faults, and it is unnecessary for their method to pre-process the signals to extract their features. Y Zhang et al. 10 presented a classifier combining SVDD with kernel possibilistic C-means clustering for the fault diagnosis of rolling machinery. XL Zhang et al. 11 proposed combining SVDD with support vector machine (SVM) to solve the data description problem with negative samples. L Duan et al. 12 presented an SVDD model by applying a binary tree structure from top to bottom for classification of machinery fault diagnoses because samples under faulty conditions are usually far fewer than samples under normal conditions. G Yin et al. 13 combined incremental support vector data description (ISVDD) with incremental output extreme learning machine (IOELM) structure to find a new failure mode quickly in the continuous condition monitoring of the equipment. Some researchers have proposed the use of Dempster–Shafer (D-S) evidence theory to resolve conflicting results generated from each diagnosis model and thus increase classification accuracy. KH Hui et al. 14 proposed an SVM–D-S model to detect multibearing faults. A Moosavian et al. 15 developed a fault diagnosis for a spark plug in an internal combustion (IC) engine based on acoustic and vibrational signals using sensor fusion and classifier combination from D-S evidence theory. Basir et al. fused data obtained from four different sensors using D-S evidence theory for fault diagnosis of an IC engine. They mentioned that the simultaneous usage of several information sources and D-S evidence theory can substantially increase fault detection accuracy. 16 Y Wang et al. 17 developed a decision-level data fusion technique using D-S evidence theory for fault diagnosis in electronically controlled engines, which could process non-commensurate data but had low fusion accuracy.
Motivation
During the operation of an engine, the pistons are driven to reciprocating motion by combustion in the cylinder and make the crankshaft rotate through the connecting rod, as shown in Figure 1. When the engine operates, the directions of dynamic impact are mainly x and y. Hence, the resulting vibrations will also propagate in both directions. To describe the vibration characteristics of the engine more fully, it is necessary to collect the vibration signal along these directions as much as possible.

Schematic diagram of the cylinder and the piston in an engine.
After the vibration signal is captured, the information needs to be fused. SVDD is a method of one-class classification, which can build a support vector description model around the target class data and separate the target class from all outliers. Hence, SVDD can produce a faster training speed than other methods such as neural networks and fuzzy C-means (FCM). For the multi-classification problem, the classification is achieved by building multiple SVDD classifiers in which every class is trained separately and every classifier is built for a respective class. The decision-level fusion based on D-S evidence theory can process non-commensurate data, has rapid calculation, and increases confidence. In engine diagnosis using multivibration sensors, the method for decision-level fusion based on D-S evidence theory can simplify calculation for a large amount of vibration data after classification by SVDD. The combined method can get better results for engine diagnosis.
Because of the advantages of flexible description and complementary classification accuracy, for this article, three vibration sensors are used to collect vibration information at different testing points in the engine and are considered engine online monitoring; then, the information from the sensors is fused to detect an engine fault. To obtain good classification, many experimental samples are needed in the traditional pattern recognition method, and the result may be uncertain or even conflicting in a single aspect when detecting a fault. A method combining SVDD and D-S evidence theory is proposed to solve the uncertainty or conflict for a single aspect when detecting a fault, where SVDD is used to recognize the data from every sensor and D-S evidence theory is used to fuse multi-information from the three vibration sensors. In this study, this method is used to detect faults in a diesel engine, and some experiments are performed using a Cummins 6BT engine to validate this method.
The method combining SVDD and D-S evidence theory
In this method, SVDD is a one-class classification algorithm,18,19 where the idea is to create a closed and compact high-dimensional region and translate the described objects into data that cover the region as much as possible. The belief function is used in D-S evidence theory, which can distinguish the difference between uncertainties. To fuse information by D-S evidence theory, the fault information can be utilized to detect an engine fault accurately.16,20
Multiclassification application of SVDD in fault detection
SVDD algorithm
SVDD is a method of one-class classification based on SVM, and it can describe all or most of the minimum radius of the training data in a high-dimensional region.
21
Suppose that the training sample contains

The constraint conditions are shown in formula (2)

Formula (1) is converted to the Lagrange extremum problem, which is as follows

where
According to statistical learning theory, as long as the kernel function
After calculation, the majority will be 0 or a small number greater than 0 in


The distance of any sample point

SVDD in fault classification
Assuming that there are

where the values of

Information fusion in engine fault detection of D-S evidence theory
Basic probability assignments
Because the SVDD shows good applicability in pattern recognition such as nonlinear and high dimension, it can improve the accuracy of the decision-level data fusion using the D-S evidence theory when making the local decision. Using the results from SVDD, the basic probability assignments (BPAs) can be built for the method of D-S evidence theory.
If a set of training samples can be separated by an optimal class, the upper bound of the expected error rate for the test sample is the ratio of the number of average support vectors to the total number of training samples, as shown in formula (10)

where
From formula (10), we can see that the upper bound of one SVDD classifier just reflects the uncertainty of SVDD for the sample


Information fusion by D-S evidence theory
According to the engine operating state, the D-S evidence theory recognition framework is defined as Θ = {normal, fault state1, fault state2,…}. The multisensor information fusion model is shown in Figure 2. Specific steps are as follows:
1. Extract the features of the original signal of each sensor, the features will be recognized by SVDD to obtain the membership of features with respect to each of the training models.
2. Multiple membership sets from different sensors are used as evidence to fuse different sensor information according to the evidence combination formula (13). A group membership is determined based on the engine fault status information of the multisensor, which is the fuzzy reflection of the engine operating state

where
3. Determine the engine operating state by the maximum membership degree principle in fuzzy mathematics, and the fused results are obtained.

Multisensor information fusion model.
Experimental validation
Data acquisition
In this article, we use the Cummins 6BT engine as the experimental object, and the test points are shown in Figure 3. The PXI e-6361 data acquisition cards from National Instruments (NI) are used as data acquisition devices. The fourth channel bearing of the crankshaft is set as a fault bearing. To simulate a variety of wear conditions, three kinds of bearings with a gap are manually set. The gaps are 0.08, 0.2, and 0.4 mm, which correspond to three states of crankshaft bearings, including normal state, slight fault, and severe fault in the engine. We use normal (

The three test points.

The time domain waveforms of three sensors: (a) testport1, (b) testport2, and (c) testport3.
Feature extraction and parameter setting
A large amount of noise is present in the vibration signal when the engine is running, and it is difficult to extract features. The method of wavelet packet decomposition can be used to analyze the signal simultaneously in the time domain and the frequency domain and is good for analyzing the noise and the singular signal. In this article, the signals are decomposed by the db1 wavelet, as shown in Figure 5. There are eight time domain waveforms of vibration signal after the wavelet packet decomposition, and the eight energy bands (c1–c8) are obtained and input as SVDD after normalization.

The signals decomposed using a wavelet.
When setting membership function parameters,
Experimental results and analysis
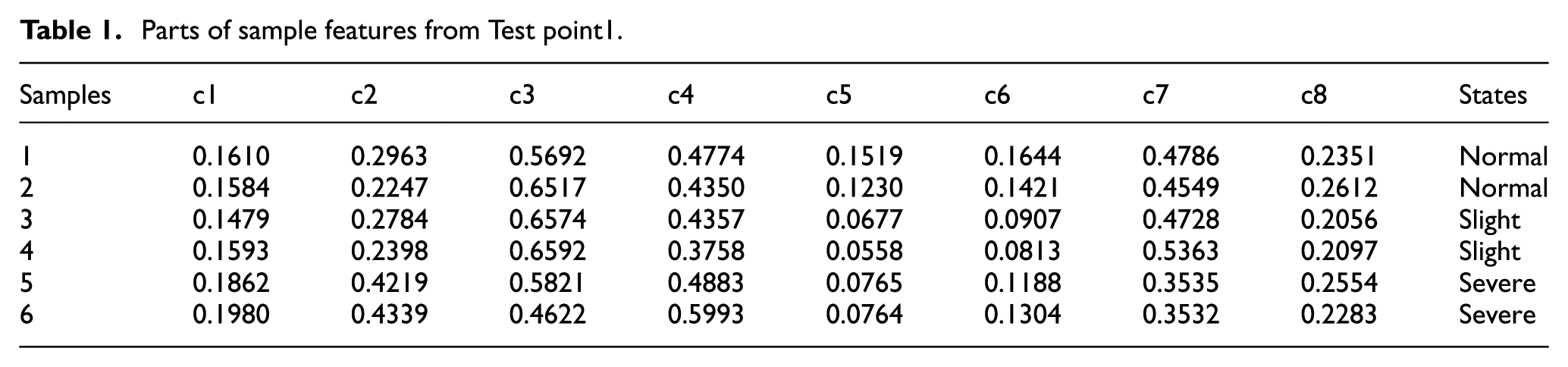
In normal (
Parts of sample features from Test point1.
Parts of sample features from Test point2.

Parts of sample features from Test point3.

BPAs of single sensor signal from the SVDD model.
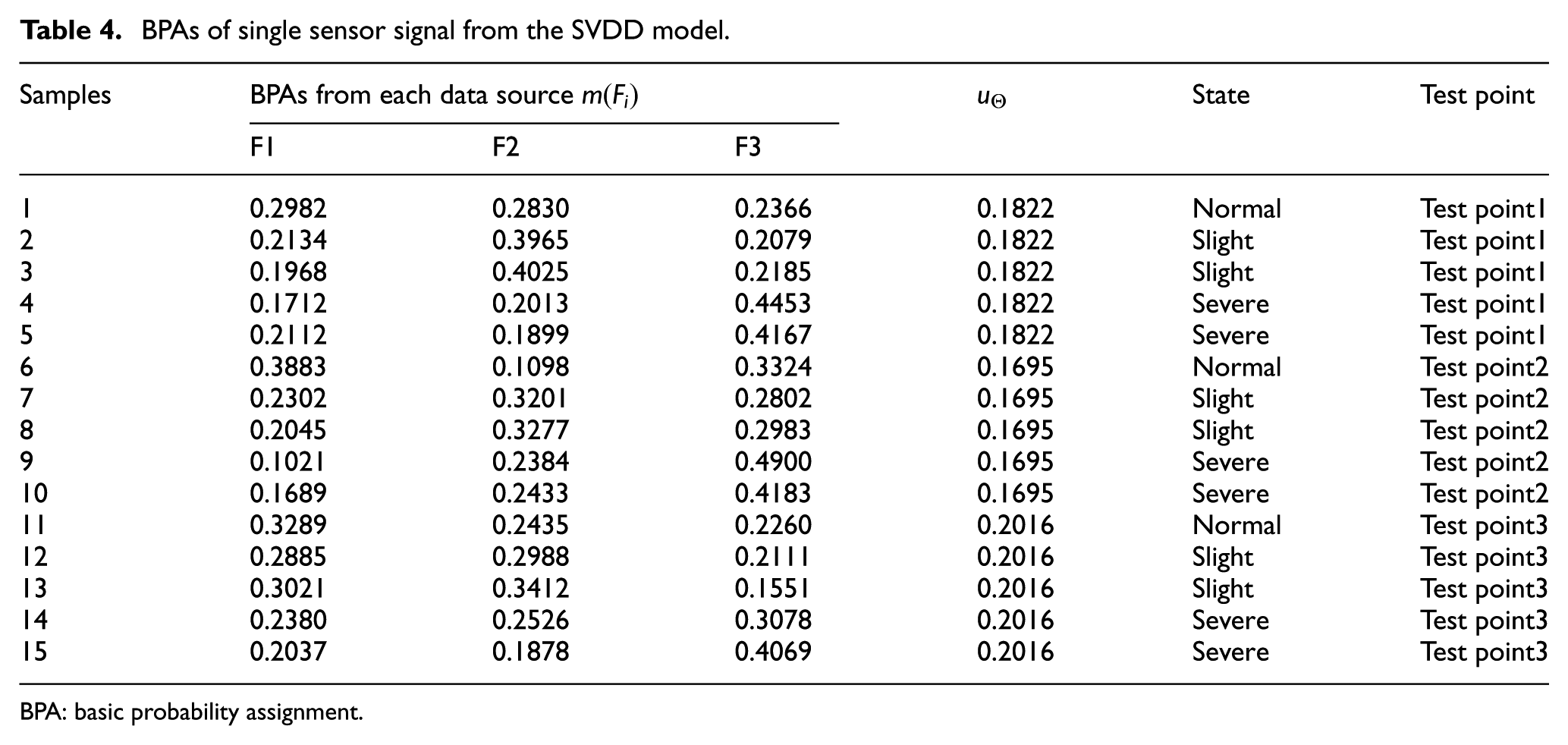
BPA: basic probability assignment.
The results of decision-level fusion combining SVDD and D-S evidence theory.
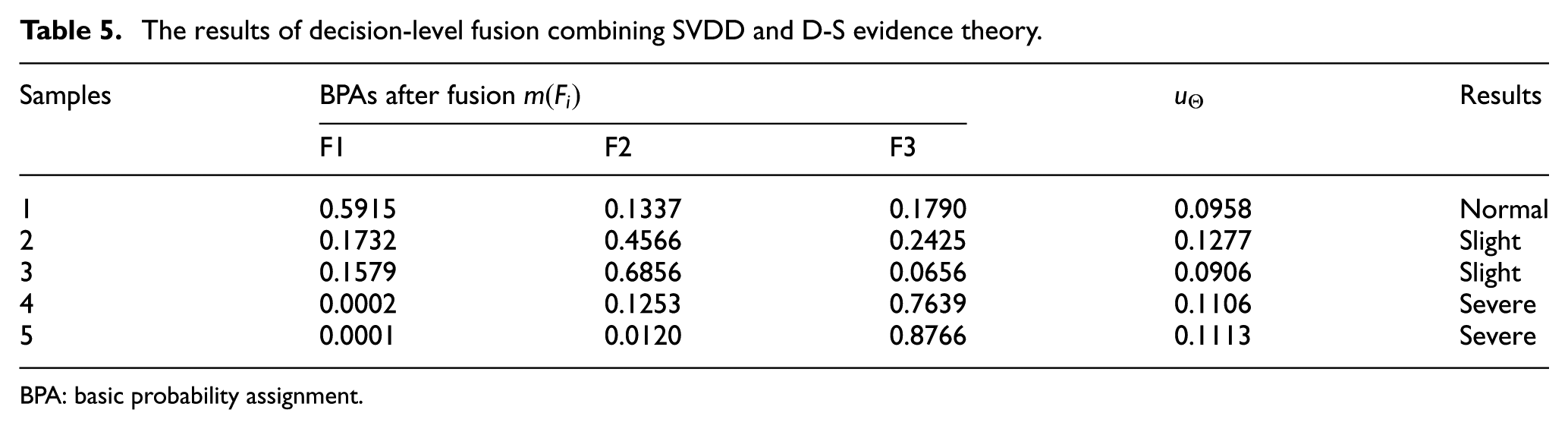
BPA: basic probability assignment.
To verify the superiority of the proposed method in this article, the same number of training samples and testing samples are input to the SVM classifier, according to the method in the literature. 22 Then, the information is fused by D-S evidence theory. To compare the proposed method to the BP neural networks and FCM, we built a back propagation neural network (BPNN) model including 24 inputs and 3 outputs and built a fuzzy clustering model including 24 input features and 3 classes. The input data for these models are from the three acceleration sensors after wavelet packet decomposition. The results of the fault detection are shown in Table 6.
The comparison of the results of various classification algorithms.

SVDD: support vector data description; D-S: Dempster–Shafer; SVM: support vector machine; BPNN: back propagation neural network; FCM: fuzzy C-means.
The significance of bold is the result of the proposed method.
According to Table 6, when a single sensor SVDD model is used, it is difficult to make a decision because there is a similarity of membership between the normal and slight states, and the classification accuracy rate is approximately 72%. However, the classification accuracy rate is more than 91% when combining the SVDD and D-S evidence theory. These results show that there is uncertainty and lower credibility when using information from just a single source for detecting faults. However, we can take advantage of complementary and redundant information when using multiple sources, and the diagnosis reliability and accuracy rate are improved.
The classification accuracy rate is 81% using a combination of SVM and D-S evidence theory, which is higher than the method that uses a single source but is lower than the proposed method. However, the detecting time for the combined SVM and D-S evidence theory is longer than the time required for the proposed method because of the large amount of calculation in SVM. Through the statistics from 90 test samples, the proposed method has been proven to be better than BPNN and FCM in classification accuracy and detecting time.
Conclusion
A method combining SVDD and D-S evidence theory, in which the information from three vibration sensors can be fused, has been presented to detect engine faults. This method takes advantage of the redundancy and complementary information in every sensor and solves the problem of uncertainty and lower credibility that is present when using single sensor information. The experimental results show that the proposed method has a higher classification accuracy rate and is faster than some methods, including the combination of SVM and D-S evidence theory, BPNN, and FCM.
Footnotes
Academic Editor: Ioan Tudosa
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (no. 60674111) and the Tianjin Nature Science Foundation under grant 15JCTPJC64200. This support is gratefully acknowledged.