
Abstract
NB-IoT (Narrowband Internet of Things), as a part of new-generation cellular communication technology, leads an innovation in wireless sensor networks. It pushes wireless sensor networks to be applied in more application fields. NB-IoT Release 14 has got the ability of positioning from cellular network service. To solve the positioning problem of new wireless sensor networks based on NB-IoT, instead of static three-point measuring way DV-HOP (distance vector hop), NB-IoT connecting point node is deployed to work as an anchor node that moves among three different places and receives signals from all other unknown nodes in the cluster. Based on the DV-HOP algorithm, in this article a topological structure for new-generation wireless sensor networks is built and the NBIOT-DVHOP mechanism combining the NB-IoT cellular network positioning ability and the DV-HOP algorithm is proposed. According to the simulation on the MATLAB platform, the effectiveness of this mechanism is verified and the deviation rate of each point from the relative position is presented. The deviation rate is related to the communication radius and the numbers of unknown nodes and anchor nodes. The simulation results can support the next step of research in NB-IoT-based wireless sensor networks, especially in data collection and fast positioning of unknown sensor nodes.
Introduction
Wireless sensor networks (WSNs) are ad hoc networks via multi-hop wireless communications connection of a large number of microsensors deployed within the monitoring scope for specific monitoring purposes. WSNs are widely used in intelligent transportation, geological survey, agricultural production, weather forecasting, medical monitoring, and other professional fields due to its features such as intelligent networking, wireless transmission, and long life cycle, and the data collected by nodes are uploaded to the data center after being aggregated. The NB-IoT (Narrowband Internet of Things) is a mobile low-speed access network with universal network coverage which is rapidly developed in recent years on the basis of a cellular mobile network. It has the characteristics of large capacity, low power consumption, and strong penetration. Therefore, it can be used in data linking for WSNs.
Node positioning is one of the key technologies for WSNs. Currently, the range-based localization and range-free localization techniques are two main types of techniques in WSN node localization. Range-based localization uses the signal attenuation rule or wave transmission time consumption to calculate the distance. Compared with the range-based schemes, the range-free schemes are more cost effective, because of no need of additional ranging devices. The procedure of a range-free localization scheme is as follows: in the area covered by WSNs, randomly distributed WSN sensor nodes are divided into several clusters, and each cluster head node is responsible for data aggregation and data access. 1 In the initialization phase of the WSN setup, all nodes shall be positioned via position measurement or algorithm calculation in a certain way. After positioning, the WSNs can grasp the coordinate position of any numbered node in the WSNs and the mutual positional relationship between the nodes. The necessary conditions for each node to correctly collect and transmit data can be created as well.
The fast development of the NB-IoT technology motivates us to think about how to apply NB-IoT into WSNs as the data linking portal. Following the combined research of NB-IoT and WSNs, we wonder if it is possible to use NB-IoT mobile anchor to help solve the positioning problem of the unknown nodes in WSNs. This is obviously innovative in the wireless network field. What is the advantage of NB-IoT in this combined research? How to solve the unknown nodes’ positioning problem? How to reform DV-HOP (distance vector hop) in this new scenario? Inspired by these questions, a mechanism of NBIOT-DVHOP is designed.
Previous studies
Positioning unknown nodes of WSN via mobile anchors was a research hotspot since the rapid development of mobile Internet and Internet of Things technology. D Niculescu and B Nath 2 lay the theoretical foundation for the DV-HOP paper “DV Based Positioning in Ad Hoc Networks.” J Mass-Sanchez et al. 3 present the performance evaluation of multi-hop localization range-free algorithms used in wireless sensor and actuator networks (WSANs), such as DV-HOP, improved distance vector hop (IDV-HOP), and weighted distance vector hop (WDV-HOP). GJ Han et al. 4 have addressed the mobile anchor node–assisted localization (MANAL) problem, which focuses on the achievements made in the past decade and aims to become a starting point for researchers who are initiating their endeavors in the MANAL research field. ZY Tao and SF Jiang 5 proposed a mobile cluster head wireless sensor network routing algorithm (MCHCA), which aimed to effectively balance the energy consumption of network node load and to improve the network life cycle. XL Shen and G Chen 6 proposed the concept of minimum deviation to address the low positioning accuracy and high anchor node cost of the existing DV-HOP algorithm and further proposed an improved Anchor Accuracy DV-HOP algorithm based on this. WX He et al. 7 proposed an MB-DV-HOP algorithm using three mobile beacons to position all the nodes in a WSN. Li et al. proposed a novel swarm intelligence optimization method which integrates bacterial foraging optimization (BFO) with quantum computing, called the quantum bacterial foraging optimization (QBFO) algorithm. In QBFO, a multi-qubit which can represent a linear superposition of states in the search space probabilistically is used to represent a bacterium, so that the quantum bacteria representation has a better characteristic of population diversity. 8 To improve the accuracy of calculating the average distance per hop, which greatly affects the positioning accuracy, H Huang et al. 9 proposed a new bacterial foraging optimization distance vector hop (BFO-DV-HOP) algorithm. In addition, H Huang 10 also suggested a QBFO-based DV-HOP algorithm for increasing the accuracy of indoor WSN positioning.
Since NB-IoT is a new technology, the study on the application of NB-IoT in WSN access and positioning has just started. ZH Qian and YJ Wang 11 studied the key technologies of NB-IoT and discussed the prospect for the application of NB-IoT in WSN. L Gui et al. 12 studied a two-class localization algorithm in WSNs. D Wu et al. used a statistical method for self-positioning 13 and proposed a crowd sensing method for mobile access–based positioning. 14
The above researches inspired us to use the NB-IoT technology in WSNs, to make network building easier, data transmission more stable, and the network simpler. Positioning is important for WSNs since the data do not have a practical meaning without knowing the relative nodes’ position. How does NB-IoT help sensor nodes to obtain their position?
In this article, a mechanism named NBIOT-DVHOP is proposed based on the NB-IoT technology in order to improve the positioning performance in WSNs. The major improvements from previous researches are listed as follows:
The NBIOT-DVHOP mechanism can position unknown nodes’ relative address and absolute address since the NB-IoT linking node obtains the beacon address directly from its system.
The NBIOT-DVHOP mechanism does not depend on sensors for positioning and calculation, while the anchor receives groups’ message from neighbor nodes and send them to the background system for calculation and record.
A single mobile anchor is used instead of three static anchor nodes. The research gives a way to estimate the average hop distance, which is a key factor in calculating the distance and then the derived positions of all unknown nodes.
WSN node positioning technology
Positioning technology based on range
There are two kinds of WSN positioning technology: range-based positioning and range-free positioning. The former measures the straight-line distance or the angle information between nodes and then uses the trilateration method or the triangular positioning method to calculate the position coordinates of unknown nodes. The common methods include time of arrival (TOA) 15 and received signal strength indicator (RSSI). 16
Range-free positioning technology
Rather than measuring the distance information between nodes, the range-free positioning technology uses the connectivity of network transmission to calculate the position coordinates of unknown nodes. The common methods include DV-HOP17,18 and centroiding algorithm. 19
Performance assessment criteria of the positioning algorithm
The purpose of studying the WSN positioning issue is to position each unknown node accurately and reduce the deviation (two-dimensional (2D) error) between the calculated location and the actual location of nodes. The assessment criteria for the related algorithms include the accuracy of positioning, the numbers of unknown nodes and anchor nodes involved in positioning, and the requirements on the communication radius of the nodes. The size of the communication radius (the farthest distance a node can communicate) is closely related with the power and the energy consumption of the nodes.
The DV-HOP algorithm
DV-HOP is a typical range-free algorithm, which is the most commonly used method for WSN node positioning. As shown in Figure 1, in the X–Y 2D space, the hollow dots represent the unknown nodes, four solid black dots serve as the fixed anchors at known positions, and all nodes can reach each other via the communication between adjacent points. The positioning process includes three different phases: 20
Calculate the minimum hops from unknown nodes to each anchor node.
Calculate the distance from unknown nodes to each anchor node.
Each anchor node calculates the average hop distance via equation (1), according to the coordinate information and the hops of other anchor nodes recorded in its own table

where (xi, yi), (xj, yj) are the position coordinates of two anchor nodes with sequence numbers i and j, respectively, hj is the hops from the anchor node i to the anchor node j, and gi is the average hop distance of all the anchor nodes.
Then, each anchor node broadcasts the calculated average hop distance to all the unknown nodes in the cluster, and each unknown node receives the first arrived information about hop distance from each anchor node and ignored the rest, thus ensuring that the node can receive the information of the anchor node from the shortest path. As a result, the unknown node can calculate its distance to the corresponding anchor node.
3. Calculate the coordinates of the unknown node.
When an unknown node receives the hop information of three or more anchor nodes, it converts the information to distances and calculates its position according to the trilateration method.
Assuming that the coordinates of an unknown node is (x, y) and the coordinates of the anchor node i are (xi, yi), and there are m anchor nodes in total, then the available system equation in general can be written as

By subtracting the first (m– 1) equations from the last equation, respectively, the above formula can be transformed into a system of linear equations in the form of AX = t, where
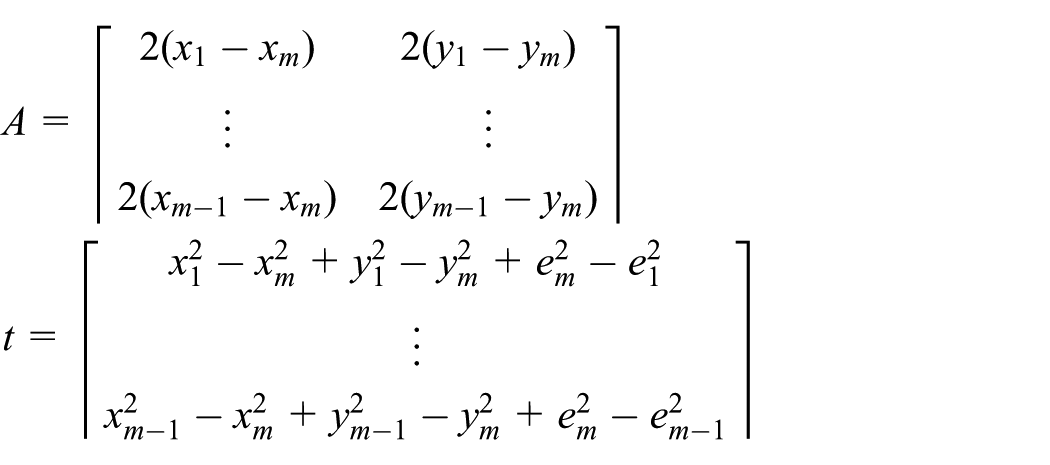
Using the least-squares method, the position coordinates of unknown nodes, X = (ATA)−1ATt, can be obtained.
The bigger the communication radius, the more nodes each node can communicate, and also the higher energy will be consumed. Then we consider the relation between deviation and the communication radius. The deviation rate of the unknown node i can be calculated using equation (3), where Di represents the distance between the i node calculation position and the actual position

Denote the average deviation rate by Wavg and the number of unknown nodes by n. Wavg can be calculated via equation (4)


Schematic diagram of WSN nodes in the DV-HOP algorithm.
Positioning advantage of the WSN node based on NB-IoT mobile access
NB-IoT is a public service network
NB-IoT is a low-power consumption, narrow-bandwidth, and wide-area Internet technology based on mobile cellular networks. Its features such as low energy consumption and strong signal penetration ability make it ideal for various applications in the Internet of Things. 21
NB-IoT nodes have the ability for base station positioning
The initial design of NB-IoT did not include the positioning function, while the base station positioning program was added in the Release 14 standard. 22
Background operation capacity of the NB-IoT network
The single sensor node of WSNs is generally a low-cost device which is not equipped with global positioning system (GPS) positioning function. During the node positioning stage, the data in measurement or calculation can be sent to the NB-IoT network based on 4G/LTE, which will be calculated by the backstage support server, then even more complex algorithms can be applied in the server. In the meantime, the position result data of node positioning are not necessary to be included every time the node sends the data because the corresponding information of related nodes and positions can be stored by the basic application programs and directly provide service for the related application.
Comparison with the other low-power wide-area network technologies
Like Lora, EC-GSM-IoT, WAVIoT, and Sigfox, the NB-IoT technology is a branch of low-power wide-area (LPWA) network technology; these LPWA network technologies share common advantages such as long battery life, huge node connecting ability, low cost, and large coverage range. Table 1 shows the special features of these four main stream LPWA network technologies.
Feature of four kinds of LPWA network technology.

LPWA: low-power wide-area; NB-IoT: Narrowband Internet of Things.
NB-IoT network is widely constructed in most areas of China by communication companies. Its base station positioning ability is unique among all LPWA network technologies. It makes the NBIOT-DVHOP mechanism possible.
However, the similar mechanism like NBIOT-DVHOP can also be feasible if the sink node gets the positioning ability by an aided system. The kind of the sink node has the dual function: positioning mode and cluster sink mode.
NB-IOT is chosen over other LPWA network technologies because of its ease of implementation, and NB-IoT network building is among the government IoT intelligent society strategies. It is provided to the public to enhance the development of many related intelligent industries, with a low change fee.
Design of an example structure and NB-IoT WSN gateway
The above research shows that under the NBIOT-DVHOP mechanism NB-IoT technology can work with WSNs, either in node positioning or in data collection and sending. The NB-IoT aggregated node is the core of the whole mechanism and it works as the gateway. Figure 2 shows the structure of a health monitoring system used in a hospital. Figure 3 shows the designed block diagram of circuit design.

Structure of a health monitoring system.

Schematic diagram of the NB-IoT WSN gateway.
Consider the design of a patient health monitoring system in an outdoor contingent hospital as an example. Patients bring monitoring wireless sensors like body temperature sensor and blood pressure sensor with them. These sensors are the member nodes of WSNs. The data are collected by sensors and delivered to the cluster sink node. The sink node receives data, fuses data continuously, and then uploads them to a database for different kinds of applications continuously. These continuous data can give doctors a diagnosis proof.
Considering the outdoor environment and the wide coverage of the NB-IoT cellular network, using it as a data linking tunnel is a good option. The NB-IoT anchor node has two working modes: positioning mode and data sending mode.
The positioning mode can be called on, the single mobile NB-IoT anchor moves to the certain beacon nodes, follows receives signal’s hops data and send to the backstage to record and calculate, and then the backstage running can calculate all sensors’ current position. The management team can get each patient’s exact position even in a chaotic and emergent environment.
The whole system works on its own battery and has strong robustness since all parts do not need external electricity supply to keep themselves working.
The NB-IoT mobile anchor multi-point mobile positioning method
WSN system structure based on NB-IoT mobile access
The flexibility and background processing capabilities of NB-IoT network mobile access provide conditions for the various applications of WSN, which not only facilitate in sending data to the data collection background, but also provide the multi-point mobility of access nodes during the network initialization phase and allow them to serve as the mobile anchors for the positioning of the unknown nodes. Such nodes move within the same WSN cluster in certain rules to receive the hop information of each node which is used for the coordinate calculation by the background in accordance with the DV-HOP mechanism, which is shown in Figure 4.

Schematic diagram of the application program combining NB-IoT and WSNs.
The NBIOT-DVHOP mechanism
The introduction of mobile anchor nodes in the positioning area can improve the positioning accuracy and reduce the network cost. If multiple mobile anchor points are introduced in a WSN, the DV-HOP mechanism can be applied directly. However, in view of the fact that the sensor nodes in each WSN have ad hoc characteristics, namely, they can send data to the aggregated node via adjacent nodes, the most cost-effective way is to allocate only one mobile access point for each cluster, and such access point serves as both an aggregated node and a mobile anchor.
The mobile anchor, which has the NB-IoT (GPS-aided) access capability, can obtain its own position. It receives all node information in the cluster, gives the shortest path and hops of feedback, then moves to another multiple positioning point, and repeats the previous communication. In view of the coverage on all the nodes in the cluster and the restriction on the communication distance of the nodes, the moving distance during each movement of the mobile anchor should not be too small, and the multiple positioning reference nodes should be distributed more uniformly in the area.
The application of the DV-HOP algorithm requires the hops of such mobile anchor that stays between multiple reference positions. It can be approximated via the minimum value of the sum of hops from all unknown nodes to two points

where hik and hjk are the hops from node k at any position to anchors i and j, respectively. The minimum of the sum of hops from all position nodes to two anchors is obtained and serves as the hop’s reference value between two anchor positions.
This is the positioning process under the NBIOT-DVHOP mechanism according to the above discussions:
Switch the NB-IoT anchor node to the positioning mode.
Place the anchor node in the first beacon place. Then the anchor node receives data with hop’s information from its neighbor unknown nodes. All the data will be forwarded to the backstage and saved in the database. Here the anchor node’s position, that is, both the logical address and the practical address, is obtained from the NB-IOT system (GPS-aided).
The anchor node should be moved to the next beacon place and repeat step 2 until it finishes all the designed places.
Calculate the lowest hop sum to find which node has the shortest distance to every two beacon nodes among all unknown nodes. Then we assume that this sum is the hops’ number between these two anchor points.
We know every two beacon nodes’ distances since their positions are decided by the designer. Formula (5) can be used to calculate an estimated average hop distance.
An application software calculates every unknown node’s positions, both logical and practical positions at the backstage, using the DV-HOP algorithm.
Switch back to the normal data connecting mode.
Simulation analysis
In MATLAB 7.1 software, assume that 50 sensor nodes are randomly deployed in a fixed square area with a side length of 100 m, and these nodes are static and do not know their own position information. A mobile NB-IoT joins this cluster. It is at position 1(0, 0) first and then moves as planned to position 2 (50, 0), position 3 (100, 0), position 4 (100, 100), position 5 (50, 100), and position 6 (0, 100). When it reaches each position, it receives single-hop or multi-hop information from all nodes in the area and records the information from each node with the minimum hop value to serve as the shortest path. The communication radius R of the initial node is 60 m. Node distribution is as shown in Figure 5.
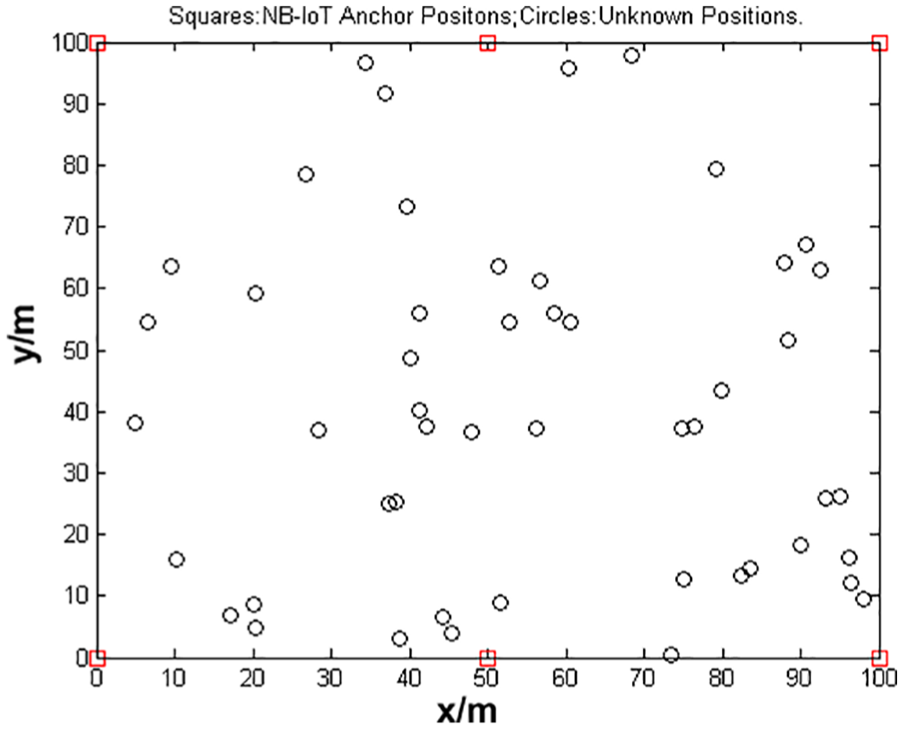
Schematic diagram of node distribution with 6 anchor positions calculated by MATLAB simulation.
In Figure 5, □ indicates the mobile cluster head of NB-IoT and ○ indicates the node for which the position is unknown and positioning calculation is needed.
After the calculation of six hop measurements, the minimum value for the sum of any two combined hops from any node to six anchor positions is taken as the shortest path between two positions, and then an estimated hop distance is calculated via the formula.
According to the coordinates of six given anchor positions and the minimum hop distance from each position node to the anchor position, the position of each position node is obtained by the least-squares method and the deviation value with the actual randomly distributed point is compared in Figure 6.

Schematic diagram of the deviation rate with different numbers of unknown node positions.
As calculated, the deviation accuracy average of node positioning is 52.33%, which basically realized the positioning function of the position node, but the deviation is still high.
The impact of the number of unknown nodes on the results
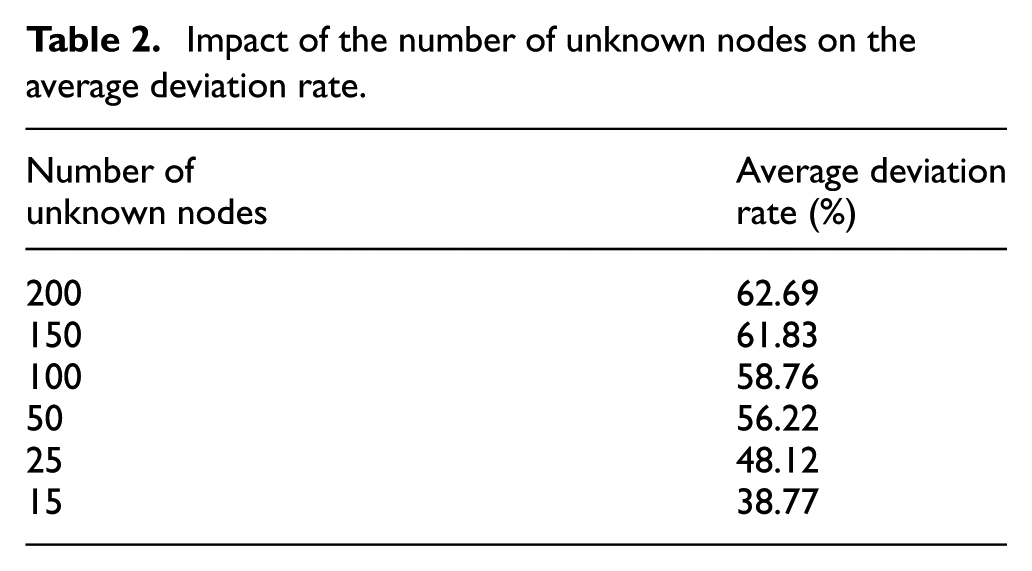
The number of unknown nodes is simulated in MATLAB. In order to avoid the impact of the random distribution of nodes, the simulation for each node is carried out 20 times on average. The results are shown in the table below under the following conditions: a square area with 100 m length of a side, six mobile anchor positions, and a communication radius of 60 m.
As shown in Table 2, with the unknown nodes decreasing, the average error rate is getting lower and the positioning effect is getting better. In the experiment, if the number of nodes is too small (e.g. 10 nodes), the results are unable to be calculated by the system. However, this value is still affected by the total size of the area and the communication radius.
Impact of the number of unknown nodes on the average deviation rate.
The impact of communication radius on the results
The communication radiuses of NB-IoT anchor nodes and position nodes are related to power consumption, the transmitting antenna, and the residual energy of the device itself. In the experiment, different coverage radiuses from 30 to 80 m are simulated. The medium of 50 is used as the number of unknown nodes, and the other conditions remain unchanged. For each radius, we simulated 20 times and the results are shown in Table 3.
Impact of communication radius on the deviation rate.

As shown in Table 4, with the increasing communication radius, the average deviation rate is decreasing gradually. However, the position deviation value of unknown nodes does not further decrease after dropping to a certain extent. The decrease of the average deviation rate is only caused by the increase of the communication radius which is the denominator, so it is not necessary to pursue a very low average deviation rate in the process of range, which wastes energy to improperly turn up the transmission power.
Impact of communication radius on the average deviation rate.

The impact of the number of anchor positions on the results
The anchor positions where the NB-IoT anchor stays affect not only the complexity of the algorithm, but also the time consumption for positioning calculation. It is assumed in the simulation that the mobile anchor travels straight along the boundary of the positioning area and stays in the designated place for communication. Figure 7 shows a schematic diagram of 10 anchor positions.
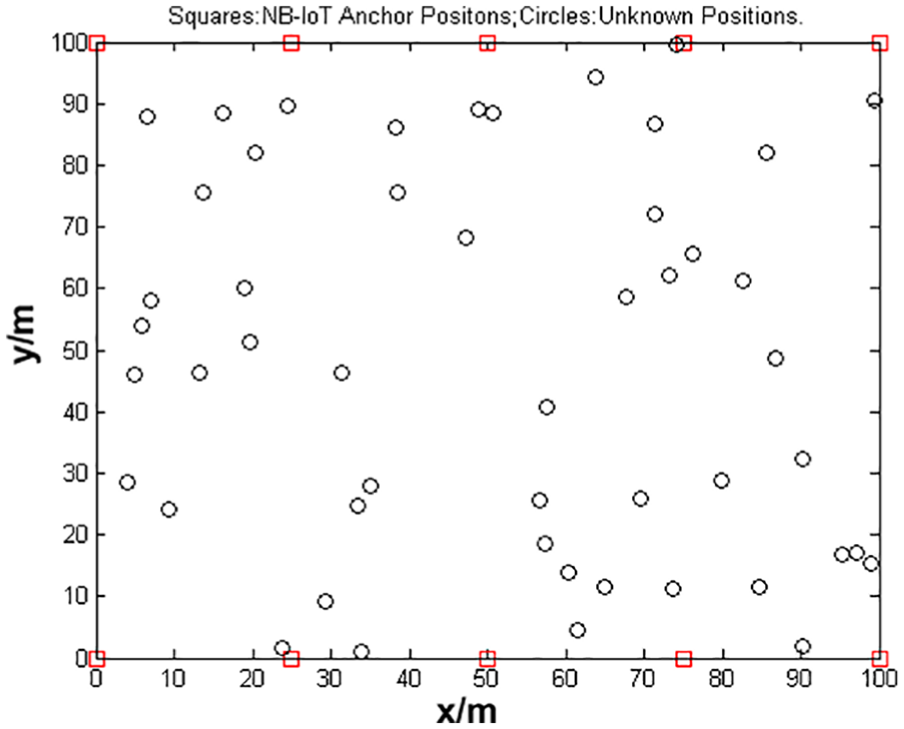
Schematic diagram of node distribution for 10 anchor nodes simulated and calculated by MATLAB.
It can be seen from Table 5 that the more the reference positions where mobile anchors stay, the lower the average deviation rate.
Impact of the number of mobile anchor positions on the average deviation rate.

Comparison with the original algorithm
Here we compare an original positioning way used in WSN: three anchor nodes can receive the GPS signal to position themselves; they deliver message to all the neighbor nodes and then spread to all other nodes by relying; all the unknown nodes can calculate their own position by the DV-HOP algorithm, as discussed in previous works.23,24
With the use of the NB-IoT mobile anchor, the NBIOT-DVHOP mechanism combines the NB-IoT technology and the DV-HOP algorithm, making the positioning more intelligent and easier. After comparing the original algorithm and the improved mechanism, these improvements are obvious, which are shown in Table 6.
Comparison between the NBIOT-DVHOP mechanism and the original algorithm.

The NBIOT-DVHOP mechanism uses the same basic algorithm as the original DV-HOP, but it gives a way to solve the hop distance estimation problem since only one anchor node is needed. Therefore, positioning accuracy and the beacon number requirement are the same.
Under the NBIOT-DVHOP mechanism, computing work is conducted in the NB-IoT background like the cloud side, and it does not depend on sensors to conduct this computing, and thus the hardware requirement is low. For a regular DV-HOP mechanism, each sensor receives a group of hops, keeps the hops’ information, and works out the hop distance from different beacons; therefore, the hardware requirement for each sensor is high.
Compared with DV-HOP, NBIOT-DVHOP uses only a single mobile NB-IoT anchor moving in a WSN cluster area following a setting rule. With no need to set up three or more anchor nodes with GPS positioning, it also works as a data sending uplink sink node. The network building of NBIOT-DVHOP is easier than that of DV-HOP. In summary, positioning efficiency is high under the NBIOT-DVHOP mechanism.
Summary and prospect
The topological structure for new-generation WSNs based on NB-IoT access is constructed in this article, and the movement of a single anchor within a WSN cluster is innovatively adopted, while the positioning on the unknown position nodes of WSNs is achieved via the positioning and background calculation function of the NB-IoT network.
After a large number of data simulation analyses, the research finds that it is a workable mechanism to combine the NB-IoT technology with WSNs, both in positioning and in data uplinking. NBIOT-DVHOP usually works in the WSNs setting up initialing period, and each node position is calculated and recorded in the background system.
It is indicated that the node positioning accuracy is affected by the number of unknown nodes, communication radius, and the anchor positions. Within a certain scope, the fewer the unknown nodes in the unit area, the higher the positioning accuracy; the larger the communication radius for a node to send and receive signals, the higher the positioning accuracy; the more the mobile anchor positions and the more the calculated reference nodes, the higher the positioning accuracy. In the actual positioning process, the strong background calculation capacity of NB-IoT and the long life and low power consumption features of WSN nodes will be fully used to optimize the selection for reasonable combinations of parameters so as to achieve the WSN node positioning. The forwarding path of the single anchor node may also affect the positioning accuracy. Also we researched the mechanism in only a 2D surface. In our further research, we will continue the research to increase the accuracy and efficiency, as well as in a three-dimensional (3D) space which will make it more practical.
With the development of the NB-IoT technology and NB-IoT universal coverage by the mobile network operators, the NB-IoT positioning function based on mobile cellular networks will be further enhanced and the accuracy will be gradually improved until NB-IoT can obtain the geographical position information of the mobile anchor independently without relying on GPS signals. The combination of the advantages of the NB-IoT technology and the WSN technology will further promote the wide application range of WSNs in more fields.
Footnotes
Handling Editor: Yong-Shin Kang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.