
Abstract
Lifetime requirements and coverage demands are emphasized in wireless sensor networks. An area coverage algorithm based on differential evolution is developed in this study to obtain a given coverage ratio
Keywords
Introduction
Numerous micro-sensor nodes that monitor events are randomly deployed in areas of interest within a network. Although battery power is limited, batteries are always selected as the energy provider in sensor networks because utilization of passive power can make this network highly flexible. Another problem that should be resolved for a network is how to prolong its life cycle1–3 while using battery power to maintain network performance, such as coverage, sensing quality, and link quality.
The energy efficiency is a constant topic of concern. In the networks with continuous power supply, the most energy efficient path is also required by some mission-critical applications. In big data collection, energy efficiency means to find an appropriate data center. 4 For cloud computing, we hope to build framework to gain a most energy efficient route to the data center.5,6 Even for service-defined internet of things (IOT), an energy-aware composition plan is also appreciated due to energy control. 7
For the battery-powered sensor network, the efficient energy control is the most essential topic in order to gain the longer lifetime. A common and effective method to balance these demands is to schedule a part of the nodes8,9 to participate in covering the area of interest. This scheduled part of nodes is called the node subset of coverage. The entire network exhibits equilibrium energy consumption and expanded lifetime because of this node subset schedule.
A new opinion is that consecutive area coverage can be translated into discrete point coverage when the monitored target is a plane area. This process can feasibly solve the area coverage problem in machine devices. The area of interest can be equal to finite interest points from the microscopic point of view. When nodes cover these points, the area of interest that is replaced by points also exhibits satisfactory coverage demands.10,11 Thus, in this study, several particular nodes are scheduled to satisfy coverage requirements for interest points to save energy and extend the network lifetime. Interest points are also called target points.
Three fundamental issues should be examined. The first issue is determining the relationship between point and area coverage through a numerical study. The second issue is solving the point coverage. The third one is selecting an improved node subset that uniformly costs minimal energy.
For the first issue, the ε-coverage algorithm in the literatures11,12 provides a bridge between area coverage and point coverage. The coverage ratio of any point on a circular plane is not less than
The area is named as the ε-coverage. When
To address the second issue, we can employ any of the algorithms presented in Chen et al., 11 Yen et al., 13 Usman et al., 14 and Qin et al.15,16 to deal with the point coverage problem. The literature 13 reported lifetime-maximized target coverage on the basis of game theory. However, the number of targets was only 10–60, which could not satisfy the number level of target points. The greedy idea 17 can be used to activate sensors and ensure that each target point satisfies the coverage requirement. However, the balance problem among sensors is not fully considered, resulting in many undesirable results, including numerous redundant and related nodes, unbalanced energy consumption, and shortened network life cycle, as shown in Chen et al., 11 Yang et al., 12 Qin et al., 16 and Altinel et al. 17
In addition to target points, the research results on node subsets might not be directly applied to our study, although these conclusions are very inspiring. Generally, sensor nodes can be divided into subsets and take turns to monitor the area of interest.3,18–20 As a result, the system’s lifetime is considerably extended. Genetic algorithm aims at finding the maximum number of disjoint complete sensor cover sets in Hu et al., 19 but its full coverage demand is more stringent than our ε-coverage requirement. The literature 20 addressed the node subset problem by activating the part of sensors that forms several approximate equilateral triangles to cover the entire area of interest. However, the algorithm is unsuitable for randomly deployed sensor networks because the formation of an approximate triangle cannot be guaranteed on the basis of activated nodes only.
The last issue is the minimal-cost problem for node subset. To reduce costs, Sarkar et al. 21 and Chen et al. 22 built a subset of nodes by scheduling nodes into sleep state or wake-up state at a particular time. However, their work needs support from clock-offset estimation, which is not a common capability of sensor networks. Mathematical models of coverage and energy consumption were considered in Amirhosein and Mohsen 23 and Yu et al. 24 to select a minimum cost subset of nodes among deployed nodes. However, the specified deployment was not applied to random networks. Linear programming was used in Amjad et al. 25 to investigate the lifetime sequence of wireless sensor networks (WSNs). Although a method to maximize lifetime was not provided directly, the key influencing factors were discussed, and the importance of linear programming in applications was revealed. The biological evolution idea can be adopted to demonstrate the effectiveness of node subsets in new applications.18,19,26,27 Node subsets were properly selected and activated in many existing studies, in which an intelligent algorithm was combined with optimal planning. The literature 11 introduced the particle swarm optimization (PSO) algorithm based on the index perception model for maximizing the lifetime of WSNs. Compared with the greedy algorithm, PSO exhibited a longer lifetime but had lower convergence speed. Improved ant colony optimization was proposed in Lin et al. 18 to maximize the lifetime of heterogeneous WSNs, and this algorithm can consider coverage and connectivity simultaneously. However, these improved algorithms possess high computational complexity because it consumes a large amount of time in the global search procedure.
The literature 28 was inspired by the Jenga game and presented a Jenga-inspired optimization algorithm (JOA) to balance the optimal solution and short computation time. This algorithm can select a minimum-cost node subset through the roulette method without considering the independence of players and their competitive weights. We improved JOA in our previous work and constructed a node subset with minimum relevance and cost; the improved JOA benefited from the additional independence of players and bios of the sensor. 15
This article presents the area coverage algorithm based on differential evolution (ACADE), which is a balance-idea-based algorithm that uses improved differential evolution (DE) 29 without parameter variation. In this algorithm, the requirements for balanced cost and minimal energy for each node are regarded as repairing factors. When the algorithm is combined with variation, crossover, selection, and other operations in DE, the population search range is expanded, and convergence up to the optimal solution is accelerated. The presented compensation strategy repairs node subsets of coverage. Accordingly, under given coverage demands with balanced cost and minimal energy, satisfactory node subsets and increased lifetime are provided by ACADE.
Network model
Background
The given area of interest A has
Given a unit of time slice

where
Coverage model
If the probabilistic sensing model is used in our study, then target point

where
Target point

According to Chen et al.,
11
if

Relationship between the area of interest and the target points.
Description of our problem
Given an area of interest, the sensor network aims to achieve a maximal lifetime to consume minimal cost in covering the target points


where
DE with non-parametric variation
Classical DE
Our effective coverage problem is minimum optimization; therefore, the proposed ACADE employs DE with the repaired factor on the basis of the balance idea. Prior to the introduction of ACADE, the solution of the minimum optimization problem using classical DE should be explained. A case of minimum optimization is considered as follows


The dimension of an independent variable is D, and
Step 1: initialization.
NP
D-dimensional vectors constitute each generation population

where rand is one random value in the interval
Step 2: variation. DE achieves individual variation through the following difference process

where F is the scaling factor. r0, r1, and r2 are random unequal integers in
Step 3: crossover. The variation and target vectors are used to generate child individual

where CR is the crossover probability factor and
Step 4: selection. DE uses a greedy strategy to determine the evolutionary individual for the next generation. The strategy details are as follows

Step 5: termination. If the generation number
Improved scaling factor
Using the power function, we improve the scaling factor F in Kong et al.
29
by designing a binary code without variation. The variant individuals

We infer only two states for the nodes, namely, active and sleep. Similar to the equation described in section “Description of our problem,”
The above variation is essentially an XOR operation process, and the difference vector
ACADE
Our effective coverage problem can be described as a minimum optimization problem. Thus, DE is a good choice to solve this problem, in which the node subset of coverage is considered an individual in a population, the dimension of the individual is the size of the subset, and the value of each dimension indicates the node state (active or sleep). The global exploration capability of an individual is enhanced after variation, crossover, and selection.
Thus, we expect to obtain a node subset (named as an individual in DE) with a suitable minimal size and satisfactory coverage performance but without any non-significant nodes. The results of DE as a heuristic method depend on the initial value. Thus, this process cannot always search for an absolutely perfect resulting individual. The individual in DE is only a node subset in coverage. Two types of cases are discussed.
In the first case, the resulting individual, also known as the node subset, cannot satisfy coverage demands. Numerous nodes should be activated for addition to this individual. Those sleeping nodes, which can maximize the increase in coverage ratio in the target point with the lowest coverage ratio, should be activated. In the second case, for individuals that satisfy coverage demands, there are redundancy active nodes. Those active nodes, which can maximize the decrease in coverage ratio in the target point with the highest coverage ratio, should be slept.
Regardless of whether an individual (node subset) satisfies coverage demands or not, the individual should be adjusted repeatedly in each time slice to become the best one. The adjusted subset can only satisfy coverage demands without any redundant nodes, which will not consume too much energy. By combining coverage and energy, the conception of bios
Positive utility ratio
When a node is in the active state, its state value is the positive utility ratio. In the

where
Negative utility ratio
Similarly, the value of a node in the sleeping state is the negative utility ratio. The negative utility ratio

If
If the coverage ratio on
Steps of ACADE
Simple DE can be used to search for node subsets up to the coverage standard. The resulting node subsets are not guaranteed to have minimal energy, and the maximum lifetime is uncertain. We improve the scaling factor in the variation to expand the search range. We introduce a compensation strategy to rebuild the node subset and cover the target points on the basis of resource balance and maximum lifetime. ACADE is implemented as follows.

The variation
Compensation strategy
In the resulting generation populations of classical DE, not all perfect node subsets reach the coverage accuracy. A compensation strategy for imperfect node subsets is presented to rebuild node subsets with minimal costs and to balance the energy cost and network lifetime. The assumption that

Two criteria are considered. First, the redundant eligibility rule states that a node is redundant if the coverage performance is not diminished when this node goes into the sleep state. Otherwise, that node is not redundant. Second, the sleep eligibility rule states that if a certain active node goes to sleep and the resulting node subset still satisfies equation (5), then this active node can be pushed into the sleep state. Otherwise, the active state should be maintained.
Figure 2 shows the relation among several presented algorithms mentioned in sections “DE with non-parametric variation” and “ACADE.” With classical DE, our ACADE shows improved key steps, as shown in the following flowchart. Variation, crossover, and selection are performed to acquire the improved node subset.

Relation among several presented algorithms.
Simulation analysis
Scenario
The MATLAB platform is used in the simulation. Area of interest A is set as a square zone covering 100 m × 100 m, and the target points are deployed in each 1 m × 1 m grid. The sensor nodes are randomly positioned, and the probabilistic sensing mode is employed. Each sensor node has primary energy of 1 J, and 0.1 J is spent in one-unit time slice. The sensor node can last 10 slices in the active state.
To evaluate the number of activated nodes, effectiveness, and availability, we compare ACADE with PSO, 11 JOA,15,28 and our previous balanced rate area coverage algorithm (BRACA) 16 through random simulation experiments with multiple settings. The configuration parameters are listed in Table 1. The experimental parameters can significantly influence the algorithms’ performance. To ensure a fair comparison, we refer to the algorithms’ original literature and set their experimental parameters to a similar coverage level.
Parameters of the four compared algorithms.
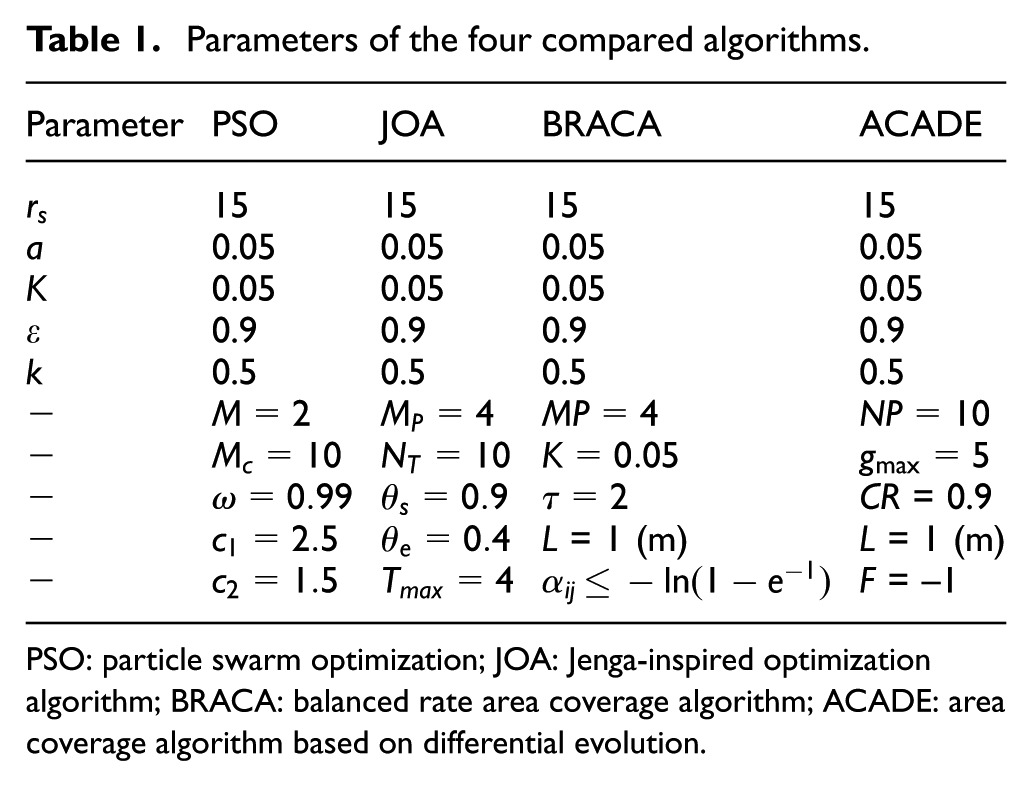
PSO: particle swarm optimization; JOA: Jenga-inspired optimization algorithm; BRACA: balanced rate area coverage algorithm; ACADE: area coverage algorithm based on differential evolution.
In consideration of randomness sourcing from the algorithms and scenes, we average the resulting data based on 30 random trials in the following simulations, except for special instructions.
Topological structural analysis
We illustrate the working process for one ACADE case with 250 sensor nodes. Figure 3(a)–(d) shows several topological structures when the sensor network is in the starting phase, the 1st time slice, the 62th time slice, and the last slice (

Network topology in four phases: (a) starting phase (
Number of activated nodes
The number of activated nodes that will vary with the different scopes of the sensor networks is determined. The experiment is repeated 1000 times for each scene, and the average result is obtained and shown in Figure 4. Seven scenes (Ns = 100, 150, 200, 250, 300, 350, and 400) are considered in this test. The average numbers of activated sensor nodes are nearly the same, that is, 22. However, their medians slowly decrease with increasing Ns and result in approximately 15 (i.e. 14.7). The maximal number in each scene increases with increasing Ns, where the maximal numbers in Ns = 100, 150, 200 are nearly 54. Further increase in Ns increases the maximal numbers. Although Ns = 400 shows the highest number of activated nodes, its quartile and median are lower than those of several scenes. This result illustrates that ACADE can efficiently control the number of activated sensor nodes.
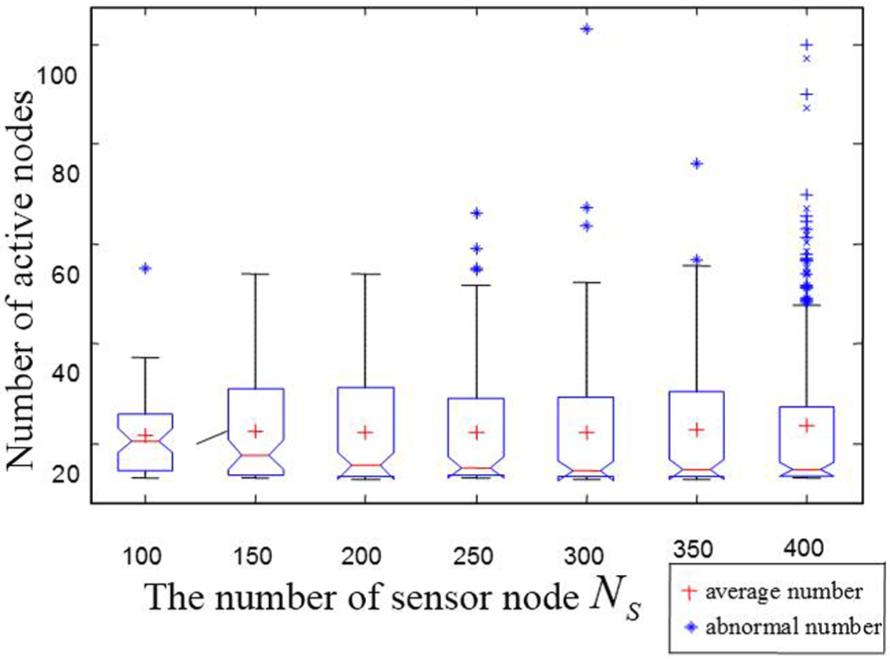
Number of active sensor in scenarios.
Residual energy analysis
The four algorithms (ACADE, PSO, JOA, and BRACA) are run 100 times with Ns = 250, and their average residual energies are presented in Figure 5. ACADE and BRACA show obvious advantages in lifetime and energy efficiency because of the presented balance idea. The energy of PSO is consumed more rapidly than that in the others. JOA provides better energy efficiency than PSO because of its combination of two essential factors, namely, the remaining energy and the number of covered target points. The proposed ACADE shows the gentlest decrease in energy consumption among all of the algorithms, resulting in the longest lifetime. This phenomenon is due to the introduction of the compensation strategy in the improved DE to determine an improved coverage node subset, and the presented balance idea is beneficial in extending the lifetime.
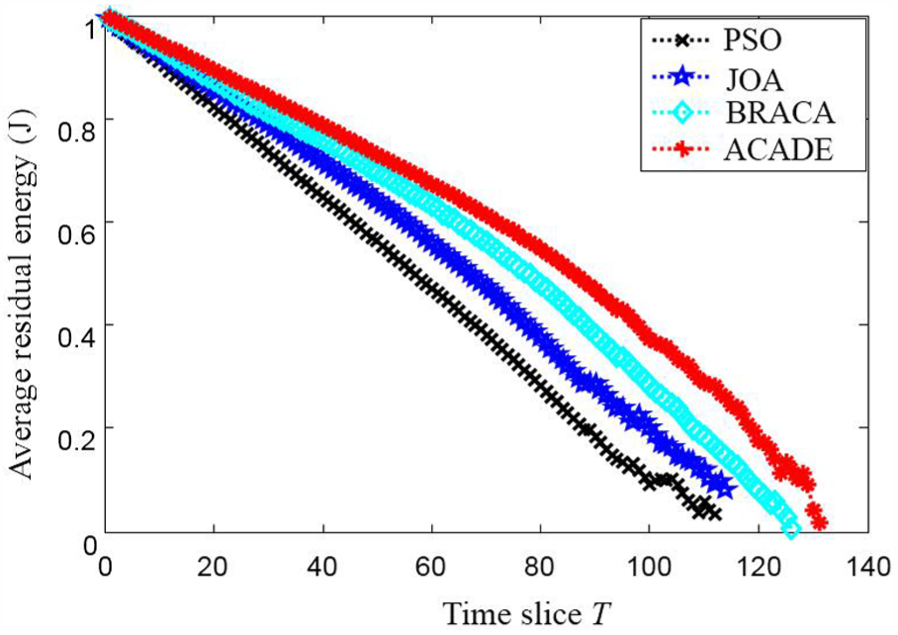
Average residual energy analysis (
Lifetime analysis
The lifetimes of the four algorithms are compared and analyzed in the various scenarios in Figure 6. BRACA shows the longest lifetime when

The lifetime varying with
Time cost analysis
The operational efficiencies of the four algorithms are evaluated by comparing their average machine time costs. Figure 7 shows their fluctuating times in different cases. BRACA is an efficient algorithm because of its shortest operation time, whereas PSO shows the lowest operating efficiency.

Analysis of average computation time in different scenarios.
In BRACA and JOA, MP = 4 players are considered to select the node subset. However, an upper bound
Although ACADE originates from biological evolution as same as PSO, an additional compensation strategy is integrated to avoid high complexity. NP = 10 populations perform not more than
Comprehensive comparison
Table 2 presents the performance evaluations for the four algorithms on the basis of the simulation results. We provide four levels to describe their working quality. PSO and JOA are poor at balancing energy, and they cannot solve the energy inefficiency problem. Consequently, their quality levels are poor. ACADE is good at saving energy and maintaining the longest lifetime. However, BRACA exhibits better operation efficiency than ACADE. A certain method cannot easily gain effectiveness and efficiency. Thus, we will apply ACADE in inconvenient battery replacement in the future. For real-time applications, BRACA is the best among all of the compared algorithms.
Comparison of the four algorithms in different tests.

ACADE: area coverage algorithm based on differential evolution; BRACA: balanced rate area coverage algorithm; JOA: Jenga-inspired optimization algorithm; PSO: particle swarm optimization.
Conclusion
Improved DE is used in this study to solve the area coverage problem. Several considerable merits are added to the proposed ACADE. Non-parametric variation is adopted as the scaling factor for DE, from which our algorithm framework is established. The operation processes, such as population variation, crossover, and selection, help expand the search range of node subsets. The presented compensation strategy, which exploits positive and negative utility ratios, repairs the node subset. All introduced techniques guide networks to determine the minimal cost node subset in each time slice and reach the coverage standard.
Although negative factors are disregarded in this study because optimal assumptions can make the research feasible, highly realistic environment settings and modules are still important. Specifically, terrain morphology, magnetic condition, and climate station should be considered in the coverage model. Future research will focus on combining our resulting work and a realistic model to achieve improved energy consumption efficiency and coverage performance.
Footnotes
Handling Editor: Marco Scarpa
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: All the authors appreciate the supports from the Chinese National Natural Science Foundation, No. 61702228, Jiansu National Natural Science Foundation, No. BK20170198, the 11th Batch of Jiangsu “Six Level Talents Peak” Project, No. DZXX-026, Jiangsu Planned Projects for Postdoctoral Research Funds, No. 1601012A, and the Fundamental Research Funds for the Central Universities, No. JUSRP1805XNC.