In this article, we study the scheduling of a charging vehicle to replenish sensor energy in a large-scale wireless sensor network, by utilizing the novel wireless energy transfer technology. We note that existing studies do not treat different sensors in the network discriminatively and consider only how to charge as many sensors as possible before their energy expirations. However, there are some critical sensors in the network, so that many other sensors have no alternative routing paths to upload their sensing data to the base station if the critical sensors die. Therefore, the energy expiration of a critical sensor will result in that not only the sensor itself cannot continue its monitoring task, but also many other sensors cannot send their data during the dead period of the critical sensor. Then, the monitoring quality of the sensor network will significantly deteriorate due to the energy expirations of the critical sensor. Unlike existing studies, we take into account the impact of energy depletions of critical sensors and investigate a charging scheduling problem for sensor networks, which is to schedule a charging vehicle to replenish a set of to-be-charged sensors, such that not only the amount of lost data by dead sensors is minimized, but also the traveling cost of the vehicle for charging sensors is minimized, too. We then propose a novel algorithm for the problem. We finally compare the proposed algorithm with existing studies and simulation results show that the amount of lost data by the proposed algorithm is only about 50% of those by the existing studies, and the weighted sum of the amount of lost data and the vehicle travel distance is about 70% of those by the existing ones.
Wireless sensor networks (WSNs) have wide applications in forest fire monitoring, building health monitoring, marine monitoring, human health monitoring, and so on.1–4 As sensors in conventional WSNs are mainly powered by batteries,5 their limited battery capacities hinder the wide deployment of WSNs.6,7
A recent breakthrough technique revolutionizes the way of replenishing energy to WSNs. Kurs et al.8 showed that they could efficiently transmit energy wirelessly, based on the strongly coupled resonance. Researchers then proposed to employ charging vehicles to replenish sensor energy via wireless energy transfer.9
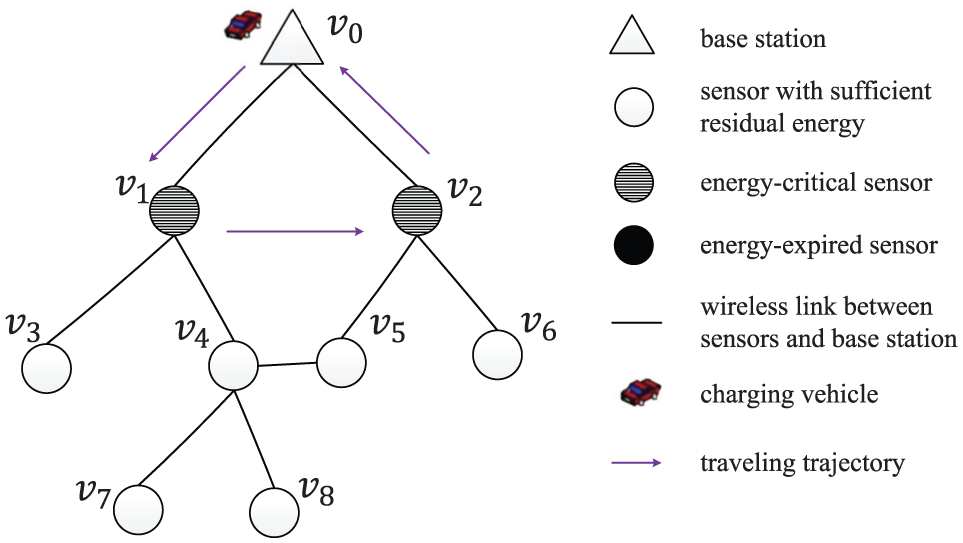
Once a sensor runs out of its energy, it cannot process its sensing tasks and transmit data to the base station. Existing studies considered to charge lifetime-critical sensors by their residual lifetimes.2,3,10–14 For example, consider the sensor network in Figure 1, which consists of one base station , four sensors , and one charging vehicle. Both sensors and can send their sensing data to the base station directly. But sensors and need to forward their data to sensor , and then sensor forwards the data to the base station. Assume that each sensor generates data at the same rate (e.g. ), and both sensors and are lifetime-critical and require to be charged, where sensor has run out of its energy and the residual lifetime of sensor is only 0.1 h. Also, assume that it will take 1 h for the charging vehicle to fully charge either of the two sensors and . Following existing charging methods,2,3,10–14 sensor will be charged before sensor , since the residual lifetime of sensor is shorter than that of sensor (i.e. ). Then, sensor will wait for 1 h before the charging vehicle starts to replenish energy to it, and its dead duration is . Also, it can be seen that both sensors and cannot upload their sensing data to the base station during the energy depletion period of sensor . Then, the amount of lost data in the network is .
An example of a critical sensor .
We note that some sensors play a critical role in the data collection of sensors in the network, because of their locations. The sensors close to the base station need to relay a large amount of data for other sensors which are far away from the base station. Not only a critical sensor cannot continue its monitoring task when it depletes its energy, but also some other live sensors cannot upload their sensing data to the base station via the data relay of the sensor. For example, consider the critical sensor in Figure 1, where the sensors and cannot upload their data to the base station if sensor dies. We now consider the impact of the energy depletion of critical sensor . We can charge critical sensor first, followed by charging sensor . Then, sensors , , and can continue to upload their data to the base station without any energy depletions, while will deplete its energy for 1 h. Therefore, the network will lose data for , which is much less than the amount of lost data in the existing studies (i.e. ).
From the example shown in Figure 1, it can be seen that it is not enough to just consider the residual lifetimes of sensors for charging scheduling, and the energy expiration of a critical sensor may result in that many other sensors cannot upload their monitoring data to the base station. Then, a large amount of data will be lost. The monitoring quality of WSNs will seriously deteriorate, which may incur severe consequences. For example, in a sensor network for monitoring forest fires, the energy expiration of a critical sensor prevents other sensors from uploading their data to the base station, which contains the information of detecting an early forest fire. The fire may become uncontrollable.
In this article, we take the impact of the energy expirations of critical sensors into consideration. By considering the amount of lost sensor data and the travel distance of the charging vehicle, we propose an algorithm for effective sensor charging schedulings.
The contributions of this article can be summarized as follows:
To the best of our knowledge, this is the first work that considers the impact of energy depletions of critical sensors when scheduling charging vehicles to replenish sensors. We formulate a novel problem, which is to find a charging tour for the charging vehicle so that both the amount of lost data of sensors and the travel distance of the charging vehicle are minimized.
We then calculate the amounts of lost data of sensors by a given charging tour, when the sensor network adopts a static routing protocol or a dynamic routing protocol, respectively.
We also propose a novel algorithm for finding an effective sensor charging tour for the vehicle.
We finally evaluate the proposed algorithm with extensive simulations. The simulation results show that the proposed algorithm outperforms the existing algorithms. Especially, the amount of lost data by the proposed algorithm is about 50% of those by the existing algorithms, and the weighted sum of the amount of lost data and the vehicle travel distance is about 70% of those by the existing ones.
The rest of the article is organized as follows. Section “Related works” reviews the related work. Section “Preliminaries” introduces the network model and defines the problem. Section “Calculating the amounts of lost data under static routing and dynamic routing” computes the amounts of lost data for a given charging tour, when the sensor network adopts a static or a dynamic routing protocol, respectively. Section “Heuristic algorithm” proposes a heuristic algorithm for sensor charging schedulings. Section “Performance evaluation” evaluates the performance of the proposed algorithm and section “Conclusion” concludes this article.
Related works
In recent years, wireless energy transfer has drawn a lot of attention, and researchers studied the employment of charging vehicles to charge sensors so as to prolong the lifetime of sensor networks.2,3,9–12,15–20 Some scientists conducted researches on the charging vehicle scheduling when only one vehicle is employed. For example, Fu et al.10 dispatched a charging vehicle to charge only hungry sensors in each round. Peng et al.11 designed a system for sensor energy replenishment via wireless energy transfer by employing a charging vehicle in the network. But the system is only applicable for small sensor networks. Xie et al.21 dispatched a charging vehicle to replenish every sensor in a sensor network in a periodical manner. They aimed to find a charging tour to maximize the ratio of the vacation time of the vehicle to its charging cycle. Ren et al.19 studied a problem of maximizing the charging throughout. That is, a charging vehicle charges the maximum number of sensors within a given period. However, this charging strategy may incur that some remote dead sensors cannot be charged for a long time. Angelopoulos et al.22 considered the importance of a sensor as the amount of data served by the sensor, but they ignored the fact that other live sensors may have alternative routing paths to upload their data to the base station.
There are also some researches that dispatched multiple charging vehicles for replenishing sensors. For example, Wang et al.12 and Gao et al.23 proposed a method to find the minimum number of charging vehicles and found the charging tours for the vehicles, such that the difference between the energy charged to sensors and the energy consumption on the vehicle movement is maximized. Dai et al.15 investigated the problem of dispatching the minimum number of vehicles to charge sensors. Jiang et al.16 studied maximizing the coverage utility of the sensor network through scheduling multiple charging vehicles to charge sensors. Xu et al.2,3 proposed an approximation algorithm to schedule multiple charging vehicles to replenish sensors for an entire monitoring period, so that the total travel distance of the vehicles for the period is minimized, by considering the different energy consumption rates of different sensors.
In addition, a breakthrough can realize ultra-fast charging using a lithium iron phosphate material, which can reach a charging rate of .24 Then, a sensor will be fully replenished within a few seconds, and the charging time can thus be neglected. Based on this technology, Lu et al.18 proposed a collaborative charging model, in which vehicles can transfer energy to each other. They studied the problem of scheduling vehicles to charge sensors, so that the ratio of the payload energy to the overload energy is maximized. Liang et al.17 deployed multiple charging vehicles with an on-demand strategy in a two-dimensional (2D) space. They found the minimum number of vehicles to charge sensors under the energy capacity constraint on each vehicle. These researches do not take the sensor charging time into account due to the high-speed charging rate. However, it is still very expensive to adopt the ultra-fast battery materials in sensors.
Different from the existing studies that ignored different impacts of the energy expirations of different sensors, we distinctively treat sensors by the amount of lost data due to their energy depletions. When a critical sensor depletes its energy, the network may lose a large amount of data. In this article, we jointly consider the impact of the energy expirations of critical sensors and the travel distance of the charging vehicle to schedule the charging vehicle.
Preliminaries
In this section, we first present the network model and then introduce static routing and dynamic routing. We finally define the problem precisely.
Network model
We consider a of WSN deployed in a 2D space with sensors , and each sensor is powered by a rechargeable battery with energy capacity . There is a base station in the network located at the center for gathering sensing data from the sensors. Denote by the set of sensors and the base station, that is, .
Each sensor generates its data at a rate of . It uploads its sensing data to the base station directly or forwards its data to another sensor which is closer to the base station. Denote by the data transmission graph, that is, , where indicates the set of wireless links between sensors. An edge between two nodes and is contained in if their Euclidean distance is within their communication range.
Two types of routing protocols
Due to the limited communication range of sensors, a sensor that is far away from the base station needs the data relay of another sensor which is close to the base station. We will consider two scenarios, one is that the sensor network adopts a static routing protocol and the other is that the network adopts a dynamic routing protocol.25 On the one hand, when the network adopts a static routing protocol, the routing path of each sensor does not change during the monitoring period of the sensor network. Then, if a sensor runs out its energy, those sensors which upload their data via the relay of sensor need to wait for the renewal of sensor and then continue uploading their data. As shown in Figure 2(a), sensors and cannot upload their monitoring data if sensor depletes its energy. Then, the data from sensors , , and are lost when sensor is dead, which is illustrated in Figure 2(b).
Comparison of static routing and dynamic routing: (a) a senson network, (b) static routing, and (c) dynamic routing.
On the other hand, if the network adopts a dynamic routing protocol, once a sensor dies, the protocol will update the routing paths to adapt to the real-time change of the network topology, by finding alternative paths which consist of only live sensors. For example, in Figure 2(c), when sensor depletes its energy, sensor still can upload its data via the relay of sensor , since the distance between sensors and is within their communication range. The energy expiration of sensor impacts only the data uploading of sensor .
Energy consumption model
Each sensor has an energy capacity of , and it consumes its energy on data sensing, data reception, and data transmission. Then, the energy consumption rate of sensor is
where , , and are the energy consumption rates on data sensing, data reception, and data transmission, respectively, which are calculated as follows
where is the Euclidean distance between sensors and ; , , and are the data sensing rate, the data reception rate, and the data transmission rate of sensor , respectively; , , , and are the given constants, and their values are , , , , and , if , and if .26
An on-demand charging paradigm
We adopt a flexible on-demand charging paradigm to charge sensors. We assume that the energy consumption rate of each sensor is allowed to change over time. The assumption is valid in many real WSN applications, including target tracking and environmental monitoring. For example, in a WSN for event detections, if no events happen in the monitoring area of the WSN, sensors usually perform their duty cycles to save energy, and thus they can run much longer than that in wake-up statuses. When an event does occur, the sensors within the event region will be activated, and they will remain in wake-up statuses to capture the event and report their sensing results to the base station. Their wake-up statuses continue until the event is gone. Thus, the energy consumption rates of these sensors in the wake-up statues are much faster compared with those perform duty-sleep cycling ones.
Denote by the amount of residual energy of sensor at time . Then, the residual lifetime of sensor is . Assume that when the residual lifetime of sensor falls below a given threshold (e.g. 2 h), sensor will send a charging request to the base station. Then, we have a set of to-be-charged sensors at time , that is, , where is a given constant with . After the base station receives the charging requests, it will deploy the charging vehicle to charge the sensors in . Assume that the base station invokes a charging scheduling algorithm to obtain a charging tour for the charging vehicle, where the algorithm will be shown later. Assume that the charging tour is .
It can be seen that, a critical sensor cannot continue its monitoring task during its dead period, and many other live sensors lose their data, if they have no alternative routing paths to send their sensing data to the base station. Given a charging tour for a set of to-be-charged sensors, denote by and the amounts of lost data under static routing and dynamic routing, respectively, and their calculations will be shown later in section “Calculating the amounts of lost data under static routing and dynamic routing.” For simplicity, denote by the amount of lost data by a given charging tour , where if a static routing protocol is adopted; otherwise (i.e. a dynamic routing protocol is adopted) .
Denote by the total travel distance of the charging vehicle in tour , that is
where is the Euclidean distance between sensors and .
Problem definition
It is desirable that both the amount of lost data and the travel distance of the vehicle are minimized. On the one hand, the amount of lost data of sensors must be minimized, since the monitoring quality of the sensor network deteriorates significantly if a large amount of sensing data are lost.27 On the other hand, the travel distance of the charging vehicle must be shortened as much as possible, because a long travel distance incurs a large amount of energy consumption.13,14
We however notice that the two objectives of minimizing both the data loss and the vehicle travel distance usually are contradictory to each other. That is, to minimize data loss, the vehicle must charge the sensors with short residual lifetimes first, even though they are far away from the vehicle; this however incurs a high vehicle travel cost. Contrarily, to shorten the vehicle travel distance, the vehicle can charge sensors along a shortest closed tour of the sensors, regardless of their residual lifetimes, but their dead durations may become much longer.
In this article, we propose a metric to measure the quality of the charging tour , which is a weighted sum of the amount of lost sensor data and the travel distance of the charging vehicle, that is
where is a given constant with . The value of indicates a trade-off between the monitoring quality of the network and the energy consumption of the charging vehicle. Different applications have different requirements on the importance of sensing data. A large value of indicates that a sensor network requires a high real-time data monitoring. For example, in a sensor network for early forest fire monitoring, data monitoring delay for a few hours may lead to an uncontrollable forest fire. In contrast, a small value of implies that a sensor network can tolerate the data loss of sensors for some time. For instance, in a sensor network for temperature monitoring, the temperature would not change significantly in a period of 1 h.
Given a sensor network , a set of lifetime-critical sensors at some time, and a weight of the amount of lost data, in this article we consider the problem of finding a charging tour for a charging vehicle, such that the weighted sum of the amount of lost data and the vehicle travel distance in tour is minimized, where .
Calculating the amounts of lost data under static routing and dynamic routing
Given a set of to-be-charged sensors at time and a charging tour of the charging vehicle for charging sensors in , assume that the total time spent by the vehicle for charging sensors in and on its travel along tour is no more than . Then, we calculate the amount of lost data of sensors during the time interval .
For each sensor in , we find its dead interval, which is from its dead time to its start charging time if the sensor will run out of its energy. We first calculate the dead time of sensor . Recall that the residual lifetime of sensor at time is , then the dead time of sensor is
Next, we calculate the start charging time of sensor . Assume that the start charging time of sensor has been found. Before the vehicle charges sensor , the vehicle must fully replenish sensor and then travel from the location of sensor to the location of sensor . It will take time to charge sensor , where , is the battery capacity of sensor , is the residual energy of sensor at time , that is, , and is the charging rate of the charging vehicle. The charging vehicle will spend time for moving from sensor to sensor , where is the distance between sensors and . Then, the start charging time of sensor is
It can be seen that if the start charging time of sensor in tour is earlier than its dead time (i.e. ), the sensor will not deplete its energy. Otherwise , the sensor will run out of its energy from to . Also, we notice that a sensor cannot upload its sensing data at some time if it depletes its energy at that time, or some relay sensors on the routing path from the sensor to the base station run out of their energy. Then, in the time interval , sensor may not send its data to the base station in multiple intervals.
To calculate the amount of lost data of the sensor network, which is the sum of the amounts of lost data of the sensors in the interval , we distinguish our discussions into two cases: static routing and dynamic routing.
Calculating the amount of lost data under static routing
Denote by the data routing path from sensor to the base station , assuming that . The routing path of sensor (which is the parent of sensor in path ) is . Then, . Denote by the set of data-lost intervals of sensor , assuming that , where . The data-lost duration of sensor is thus
Assume that the set of data-lost intervals of sensor has been found, which is . Then, the set of data-lost intervals of sensor consists of the dead interval of sensor and the set of data-lost intervals of subpath . That is
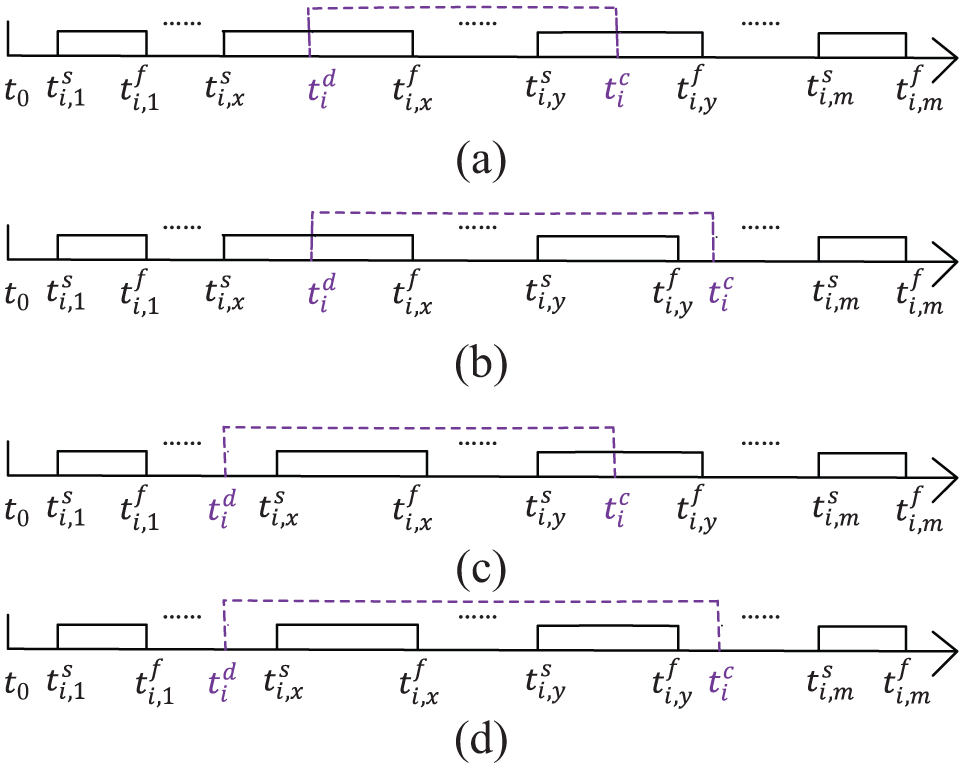
It can be seen that the dead interval of sensor may span multiple intervals in ; see Figure 3. We then calculate the set so that any two intervals are disjoint with each other. We consider four cases as follows.
Case 1. is contained in an interval , and is contained in another interval , where and are two positive integers with ; see Figure 3(a). We can remove the intervals from the interval to the interval from and then add a new interval . That is
Case 2. is contained in an interval , while is not contained in any intervals in . Assume that is after the end time of the interval , but before the interval; see Figure 3(b). We remove the intervals from the interval to the interval from and then add a new interval . That is
Case 3. is not contained in any intervals in , while is contained in an interval . Assume that is after the end time of the interval, but before the interval ; see Figure 3(c). We remove the intervals from the interval to the interval from and then add a new interval . That is
Case 4. Both and are not contained in any intervals in . Assume that is after the end time of the interval but before the interval , and is after the end time of the interval but before the interval; see Figure 3(d). We remove the intervals from the interval to the interval from and then add a new interval . That is
A new interval by joining multiple disjoint intervals : (a) Case 1, (b) Case 2, (c) Case 3, and (d) Case 4.
After obtaining the set of data-lost intervals of sensor , we can calculate the data-lost duration of sensor . Then, the amount of lost data of sensor is , where is the data rate of sensor . We finally calculate the amounts of lost data of the sensors in and thus obtain the total amount of lost data
The algorithm for calculating the amount of lost data under static routing is presented in Algorithm 1.
Calculating the amount of lost data under static routing.
Require: A sensor network , the transmission range between two sensors, the data rate , the routing path of each sensor in , a set of to-be-charged sensors, and the dead interval of each sensor in Ensure: The amount of lost data 1: Construct a v0-rooted tree from the routing paths of the sensors in ; 2: ; 3: /* Perform a breadth-first search from the base station on the tree */ 4: for each sensor in do 5: Assume that sensor is the parent of sensor in the tree and the set of data-lost intervals of sensor is ; 6: Calculate the set of data-lost intervals of sensor by the dead interval of sensor and the set of data-lost intervals of sensor ; 7: Calculate the data-lost duration of sensor by applying equation (9); 8: ; 9: end for 10: return
It can be seen that
Algorithm 1
visits every node only once during the breadth-first search (BFS) on the tree, and for visiting each sensor it takes time to calculate the set of data-lost intervals and data-lost duration of sensor . Then the time complexity of
Algorithm 1
is , since there are nodes in the v0-rooted tree.
Calculating the amount of lost data under dynamic routing
Different from static routing, when the network adopts a dynamic routing protocol, the protocol will update the routing paths to adapt to the real-time change of the network topology once a sensor dies. For example, when a relay sensor on the routing path of a sensor dies, sensor can upload its data by finding an alternative path which consists of only live sensors.
Denote by the set of live sensors at time , . Let be the induced graph by set from , where . There may be multiple connected components in . Denote by the set of the sensors that are in the same connected component with the base station in . It can be seen that only sensors in can transmit their data to the base station at time , whereas sensors in the set fail to upload their data to the base station.
In the following, we calculate the amount of lost data under dynamic routing. During the charging period , the network topology changes at only the moments when a sensor dies or the vehicle starts to charge a sensor, but does not change at other time points. Denote by the set of sensors which will run out of their energy for some time in the interval , that is, , and the sensors in will incur times of topology changes during . Let be a dead time or a start charging time of a sensor in and sort all the time points in the ascending order, . Then, the topology of the sensor network will change at time due to the death or renewal of a sensor in . We partition the interval into time intervals . It can be seen that the topology will not change in each of the intervals. Let be the set of live sensors in the interval , . Assume that is the induced subgraph by set .
We calculate the amount of lost data in the interval as follows. Let be the set of live sensors in the same connected component with the base station in . Then the amount of lost data during the interval is , where is the duration of the interval , that is, . Finally, the amount of lost data by sensors in is
The algorithm for calculating the amount of lost data under dynamic routing is presented in
Algorithm 2
.
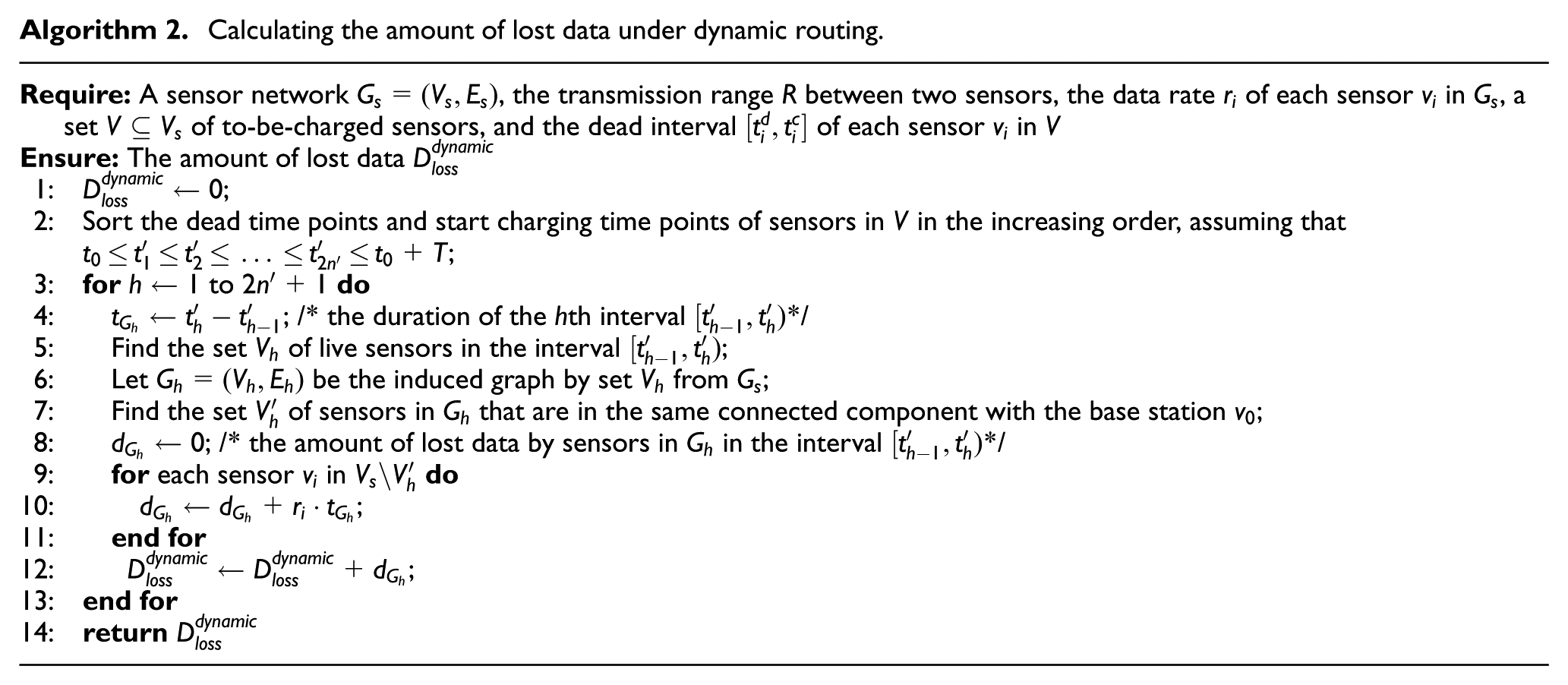
Calculating the amount of lost data under dynamic routing.
Require: A sensor network , the transmission range between two sensors, the data rate of each sensor in , a set of to-be-charged sensors, and the dead interval of each sensor in Ensure: The amount of lost data 1: ; 2: Sort the dead time points and start charging time points of sensors in in the increasing order, assuming that ; 3: for to do 4: ; /* the duration of the interval */ 5: Find the set of live sensors in the interval ; 6: Let be the induced graph by set from ; 7: Find the set of sensors in that are in the same connected component with the base station ; 8: ; /* the amount of lost data by sensors in in the interval */ 9: for each sensor in do 10: ; 11: end for 12: ; 13: end for 14: return
It can be seen that the amount of lost data in in the interval is the sum of the amounts of lost data in the intervals. In each interval, it takes time to find the sensors that are in the same connected component with by performing a depth-first search (DFS) from the base station , and it then takes time to calculate the amount of lost data for sensors in in the interval . Therefore, the running time of
Algorithm 2
is , as .
We here use an example to illustrate the calculation of the amount of lost data in the interval . Assume that there are two energy-critical sensors and in the network; see Figure 4. We further assume that the charging tour is and , where and are the dead times of sensors and , and and are the start charging times of sensors and , respectively. We compute the amount of lost data of the network as follows.
An example for calculating the amount of lost data under dynamic routing.
In the first interval , no sensors die and the sensor network in is shown in Figure 5(a). The amount of lost data during the interval is .
The network topology in each interval: (a) sensor network in , (b) sensor network in , (c) sensor network in , (d) sensor network in , and (e) sensor network in .
In the second interval , sensor dies at time . Then, sensor is unable to upload its data to the base station, while sensor can upload its data via the relay of sensor ; see Figure 5(b). The amount of lost data in the interval is , where .
In the third interval , sensor has not been charged yet, and sensor expires its energy at time . All sensors cannot upload their data; see Figure 5(c). The amount of lost data in the interval is , where .
In the fourth interval , sensor is charged at time but sensor has not been charged yet. Then, sensors and can upload their data via sensor , and sensors , , and can also send their data to the base station by the relay of sensor . Sensor is still disconnected with the base station , since sensor has not been charged yet; see Figure 5(d). The amount of lost data in the interval is , where .
In the fifth interval , sensor is charged at time . All sensors are live in this interval; see Figure 5(e). The amount of lost data in this interval is .
The total amount of lost data in is then .
Heuristic algorithm
In this section, we propose a novel heuristic algorithm for the data loss and the travel distance minimization problem. We first describe the algorithm and then devise two pruning strategies to reduce the running time of the heuristic algorithm.
Algorithm description
We propose a heuristic algorithm to find a charging tour , which has the minimum value of the objective function . Given a set of sensors, the algorithm delivers the charging tour with multiple iterations and finds the to-be-charged sensor in the iteration. Assume that the algorithm has found the first to-be-charged sensors in the first iterations and their charging order is . The algorithm finds the to-be-charged sensor as follows. It can be seen that there are different sequences by choosing sensors from the rest sensors, where is a given positive integer, for example, . For each of the sequences, the algorithm first calculates the objective value of the partial charging order with sensors. Then, the algorithm finds a sequence among the sequences with the minimum value of . Finally, the to-be-charged sensor is . The algorithm continues until the last to-be-charged sensor is found.
We now show the calculations of the objective value for a partial order . On the one hand, the travel distance of the charging vehicle is calculated as . On the other hand, the amount of lost data will be calculated as follows. Note that we cannot calculate the amount of lost data by directly applying
Algorithm 1
or
Algorithm 2
in the previous section, since the charging sequence of the sensors in is unknown. Then, the start charging times of sensors in are unknown, too. For simplicity, we assume that the start charging time of each sensor in is , where is the start charging time of sensor and is the charging time of sensor . It can be seen that the time serves as the earliest start charging time of the remaining sensors in any charging order with the first sensors being .
The heuristic algorithm is presented in
Algorithm 3
.
MDL.
Require: A graph , a set of to-be-charged sensors, a weighted parameter with , and a parameter Ensure: A charging tour with the minimum value 1: ; 2: for to do 3: ; /* the minimum value so far */ 4: while to do 5: Obtain the charging sequence ; 6: if routing is static then 7: by invoking
Algorithm 1
; 8: else 9: by invoking
Algorithm 2
; 10: end if 11: ifthen 12: ; 13: ; 14: end if 15: end while 16: Assume that ; 17: ifthen 18: The to-be-charged sensor is in ; 19: else 20: /**/ 21: , with ; 22: The order of the last to-be-charged sensors in is ; 23: end if 24: end for 25: return tour
Pruning strategies for finding a tour with the minimum DL value
We note that it takes a non-trivial time to calculate the objective value of for a charging sequence, that is, if a static routing protocol is adopted (see Lemma 1), and if a dynamic routing protocol is adopted (see Lemma 2). In addition, the heuristic algorithm finds the to-be-charged sensor by calculating the amounts of lost data for as many as different charging sequences in one iteration. In this subsection, we will devise two pruning strategies to reduce the running time of the heuristic algorithm as much as possible.
First pruning strategy
It can be seen that when a sensor uploads its data to the base station directly, its data-lost intervals will consist of only its dead interval. Assume that we have calculated the values of charging sequences of the total sequences in
Algorithm 3
, where . Let . For the sequence , in the first pruning strategy, we find a lower bound on of the sequence as , assuming that sensors send their data to the base station directly. If , we do not calculate the actual value of the sequence. It can be seen that it takes only time to calculate the lower bound , while it takes time to compute the actual value of .
Second pruning strategy
We note that the charging sequences can be considered as a tree rooted at a virtual node , where the nodes on the path from the root node to each leaf node in the tree form a charging sequence, and the length of each path is exactly equal to . For example, Figure 6 illustrates such a tree when and . It can be seen that we can calculate the values of the sequences by performing a DFS from . Assume that we are now visiting a non-leaf node and we have obtained a partial charging sequence , where the length of the partial sequence is strictly less than , that is, . Assume that is the minimum value of the values of the charging sequences obtained so far and is the value of the partial sequence . If , there is no need to visit the nodes in the subtree rooted at .
An example for the second pruning strategy.
For example in Figure 6, there are 12 charging sequences from the root node to the leaf nodes. Denote by the values of these sequences. Assume that we have calculated the values of the first three sequences , and and that the current is . We next calculate the value of of . If , we do not calculate the values of the three sequences .
Performance evaluation
In this section, we evaluate the performance of the proposed algorithm by comparing it with existing algorithms by varying some important parameters, including the network size, maximum sensor data rate, charging rate and travel speed of the charging vehicle, weight value of the amount of lost data, and the parameter in the algorithm.
Simulation environment
We consider a wireless rechargeable sensor network deployed in a square. There are 100–500 sensors in the network, which are randomly deployed in the area. The battery capacity of each sensor is .9 Each sensor has a different data rate , which is randomly selected from an interval , where and . The communication range of the two sensors is . We adopt a real sensor energy consumption model, which has been introduced in section “Energy consumption model.” A base station is located at the center of the area. A charging vehicle is deployed for charging sensors in the network, which is co-located with the base station. The vehicle charges a sensor at a rate of and moves at a speed of . Each sensor sends a charging request to the base station when its residual lifetime is shorter than a given threshold . The monitoring period in the simulations is 1 year. The simulator was implemented in C++ and all simulations were performed on a server with an Intel® Core™ i7 CPU (2.9 GHz) and an 8 GB RAM. In addition, each simulation value in the figures is the average obtained with 1000 different networks with the same network size.
To evaluate the performance of the proposed algorithm minimizing data loss (MDL), we compare it with five existing algorithms, that is, traveling salesman problem (TSP),28 earliest deadline first (EDF),29 an NDN based real time wireless recharging protocol (NETWRAP),13,14 adaptive-additive (AA), and temporal-spatial real-time charging scheduling algorithm (TSCA).30 Algorithm TSP finds a shortest charging tour to visit sensors, but does not consider the residual lifetimes of sensors. Algorithm EDF schedules the vehicle to charge sensors by their residual lifetimes in the increasing order, that is, the shorter the residual lifetime of a sensor is, the earlier the sensor is charged by the vehicle. Algorithm NETWRAP finds the next to-be-charged sensor with the minimum weighted sum of the residual lifetime of the sensor and the travel time for the vehicle moving to the sensor.13,14 Algorithm AA selects a portion of sensors to be charged, so that each chosen sensor is charged before its energy depletion and the difference of the amount of energy charged to the chosen sensors and the energy consumption on the vehicle movement is maximized.13,14 Finally, algorithm TSCA develops a temporal-spatial charging scheduling algorithm, which first sorts the to-be-charged sensors by their residual lifetimes in the increasing order and then adjusts the charging order to minimize the number of dead nodes while maximizing the energy efficiency for prolonging network lifetime.29
Algorithm performance
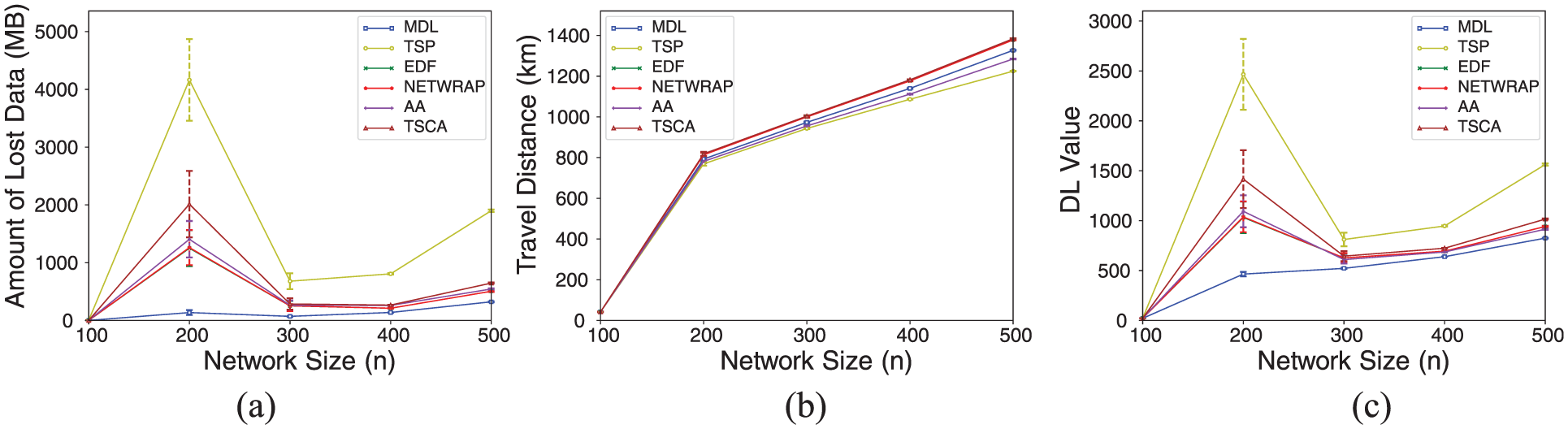
We first evaluate the performance of the proposed algorithm MDL by varying the network size from 100 to 500 under static routing and dynamic routing; see Figures 7 and 8, respectively, where , , , , and . Figure 7(a) shows that, under static routing, the amount of lost data by each algorithm increases with a larger network size, and the proposed algorithm MDL delivers the smallest amount of lost data among the algorithms. For example, the amount of lost data by algorithm MDL is only about 11%, 39%, 39%, 35%, and 29% of those by the algorithms TSP, EDF, NETWRAP, AA, and TSCA, respectively, when the network size is . Figure 7(b) shows that the travel distance by each of the six algorithms increases with the increase of the network size, and the travel distances by different algorithms are almost identical. Figure 7(c) demonstrates that the objective value by algorithm MDL is the smallest one among the six algorithms, where the value is the weighted sum of the amount of lost data and the vehicle travel distance. It can be seen from Figure 7 that the algorithm MDL performs better in a larger network. For instance, the value by algorithm MDL is only about 13%, 43%, 43%, 40%, and 33% of those by the algorithms TSP, EDF, NETWRAP, AA, and TSCA, respectively, under static routing, when the network size is .
Algorithm performance by varying the network size under static routing: (a) amount of lost data, (b) travel distance, and (c) DL value.
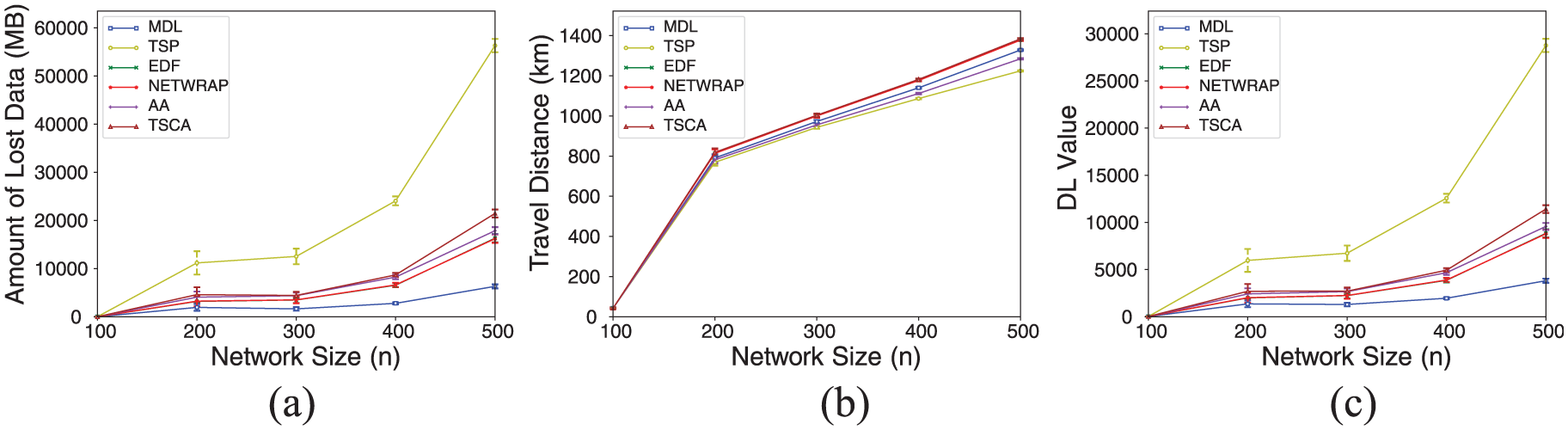
Algorithm performance by varying the network size under dynamic routing: (a) amount of lost data, (b) travel distance, and (c) DL value.
Figure 8 shows the performance of the algorithms under dynamic routing, in which a sensor can find an alternative live routing path to upload its data to the base station when some sensors deplete their energy. Figure 8(a) plots similar curves as that in Figure 7(a), but the amount of lost data by each algorithm under dynamic routing is much smaller than that under static routing, since under dynamic routing a sensor with a heavy workload does not need to wait for the renewal of dead sensors in its routing path and is able to find another live routing path for data uploading. Notice that there is an interesting phenomenon shown in Figure 8(a). That is, the amount of lost data by each algorithm when there are 200 sensors in the network is more, rather than less, than that when there are more than 200 sensors (e.g. 300 sensors) The rationale behind the phenomenon is that a sensor is more likely to find a live alternative routing path with more sensors in the network when some sensors die. However, when there are 200 sensors in the network, more other live sensors may be influenced by dead sensors even if there are few dead sensors in the network. Also, the value by algorithm MDL is the smallest under dynamic routing (see Figure 8(c)).
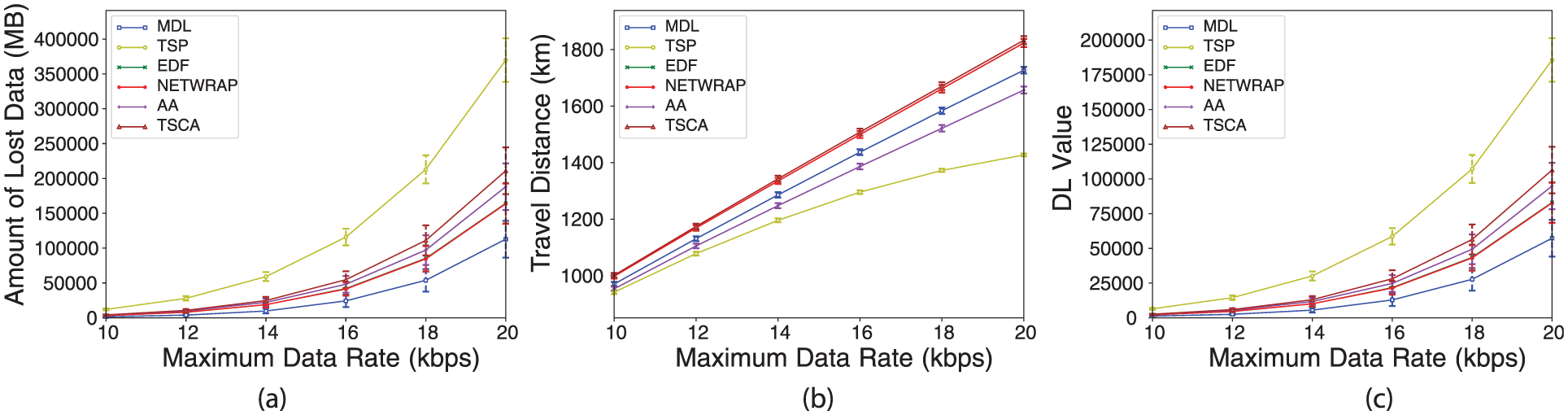
We then investigate the performance of algorithm MDL by varying the maximum data rate from to , where , , , , and . Figures 9 and 10 demonstrate that the amounts of lost data and the values by algorithm MDL are the smallest ones among the six algorithms (see Figures 9(a) and (c) and 10(a) and (c)), and the travel distances by it are only about 4% longer than that by the state-of-the-art AA under both static routing and dynamic routing (see Figures 9(b) and 10(b)).
Algorithm performance by varying the maximum data rate under static routing: (a) amount of lost data, (b) travel distance and (c) DL value.
Algorithm performance by varying the maximum data rate under dynamic routing: (a) amount of lost data, (b) travel distance, and (c) DL value.
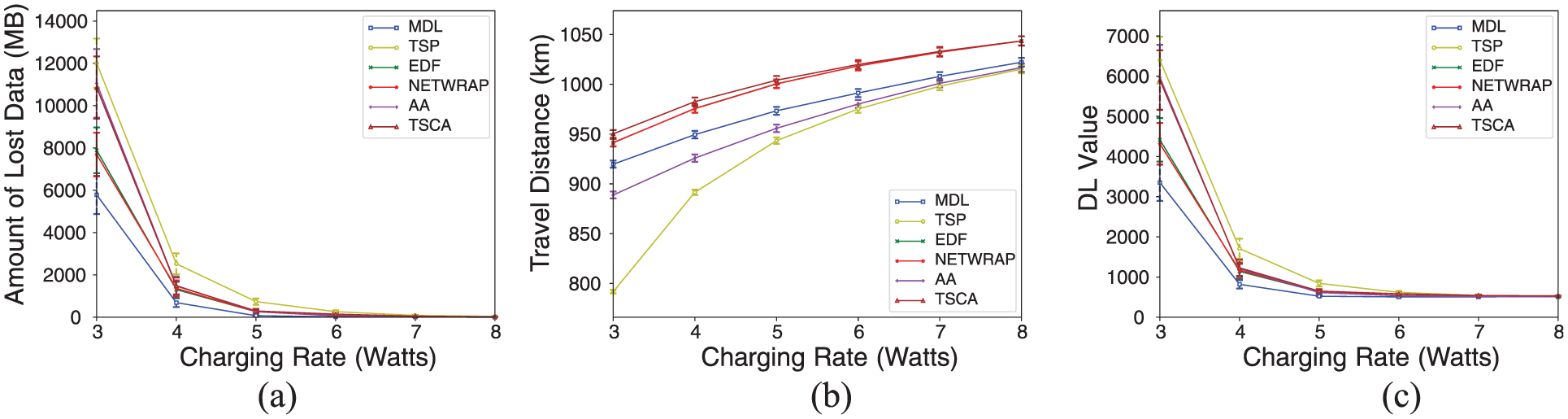
We also study the algorithm performance by varying the charging rate of the vehicle from to , where , , , , and . Figures 11(a) and 12(a) show that the amount of lost data by each algorithm dramatically decreases with a faster charging rate, as the waiting time of each to-be-charged sensor before its charging is significantly shortened. Figures 11(b) and 12(b) demonstrate that the travel distance by each algorithm slightly increases with a faster charging rate , since the dead duration of each sensor is shorter with a faster charging rate , and its live duration is thus longer in the entire monitoring period, and the vehicle has to charge sensors more frequently. Figures 11(c) and 12(c) further show that the objective value by algorithm MDL is much smaller than that by each of the other five algorithms TSP, EDF, NETWRAP, AA, and TSCA. For instance, when the charging rate is , the value by it is about 27%, 55%, 55%, 48%, and 41% of those by the algorithms TSP, EDF, NETWRAP, AA, and TSCA under static routing and about 52%, 76%, 78%, 56%, and 57% under dynamic routing.
Algorithm performance by varying the charging rate under static routing: (a) amount of lost data, (b) travel distance, and (c) DL value.
Algorithm performance by varying the charging rate under dynamic routing: (a) amount of lost data, (b) travel distance, and (c) DL value.
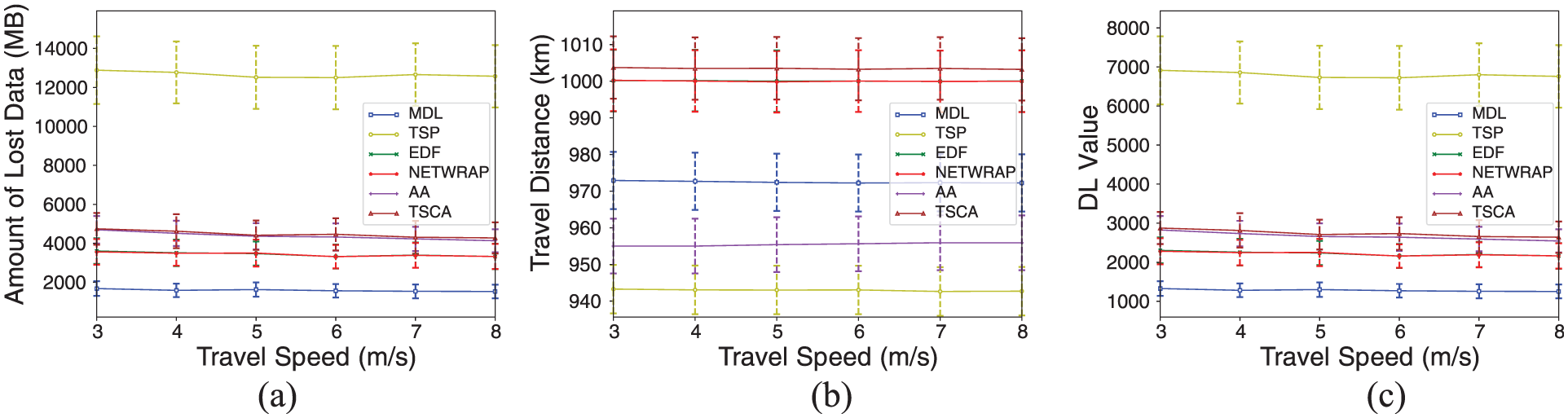
We finally investigate the algorithm performance by varying the travel speed of the vehicle from to , where , , , , and ; see Figures 13 and 14. It can be seen that the amount of lost data and the value by algorithm MDL are the smallest ones, while its travel distance is only slightly longer than that of algorithm TSP.
Algorithm performance by varying the vehicle travel speed under static routing: (a) amount of lost data, (b) travel distance, and (c) DL value.
Algorithm performance by varying the vehicle travel speed under dynamic routing: (a) amount of lost data, (b) travel distance, and (c) DL value.
Impact of important parameters
We evaluate the weight of the amount of lost data (see equation (6) in section “Problem definition”) on algorithm performance, by increasing from 0 to 1, where , , , , and . The larger the value of is, the more critical the amount of lost data is. For example, we consider only minimizing the vehicle travel cost when , while ignoring the vehicle travel cost and considering only minimizing the amount of lost data when . Figure 15(a) and (b) shows that both the amount of lost data and the travel distance by each of the five algorithms TSP, EDF, NETWRAP, AA, and TSCA do not change with the increase of . In contrast, the amount of lost data by algorithm MDL decreases, while the travel distance by it increases, with a larger value of . Figure 15(c) and 16(c) shows that the values by algorithm MDL under both static routing and dynamic routing are the smallest.
Algorithm performance by varying the parameter under static routing: (a) amount of lost data, (b) travel distance, and (c) DL value.
Algorithm performance by varying the parameter under dynamic routing: (a) amount of lost data, (b) travel distance, and (c) DL value.
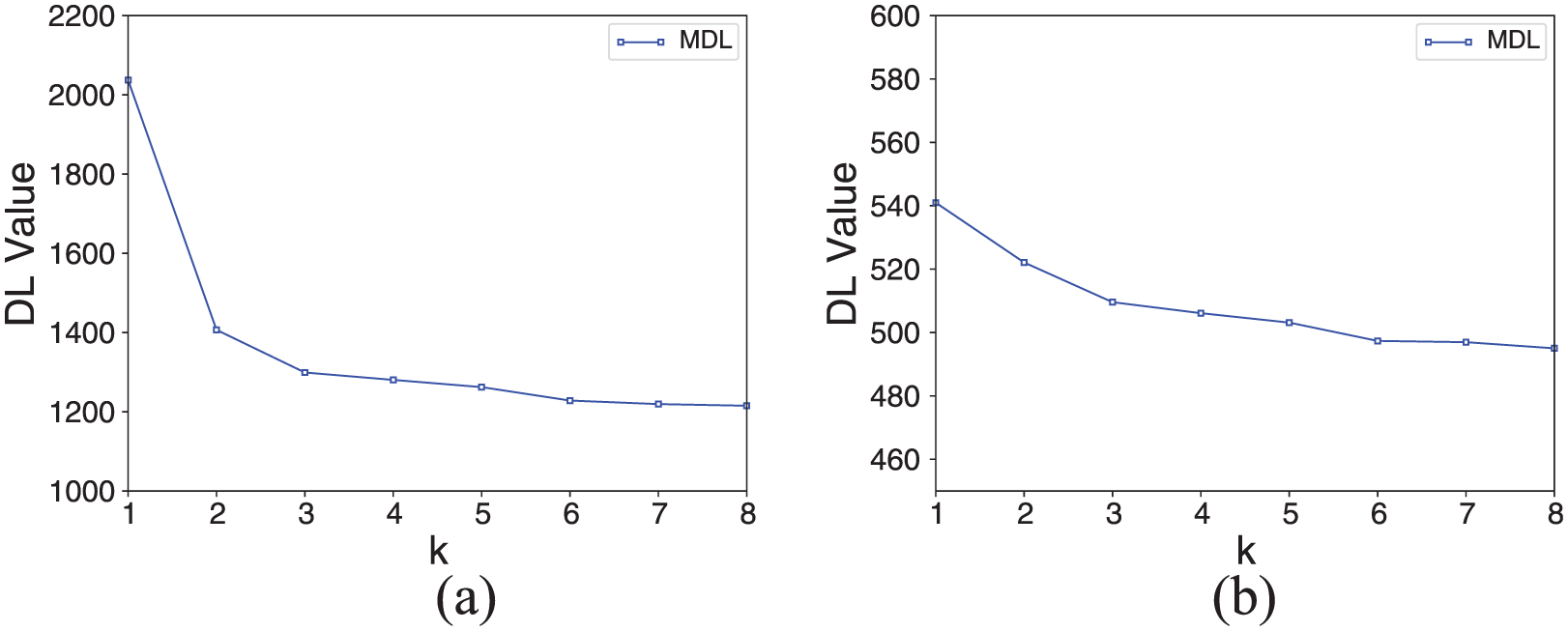
We finally study the impact of the parameter on the proposed algorithm MDL, where is the search depth in algorithm MDL for the next to-be-charged sensor. Figure 17 shows that the value by algorithm MDL is smaller with a larger value of .
Algorithm performance by varying the parameter : (a) DL value under static routing and (b) DL value under dynamic routing.
In summary, it can be seen that both the amount of lost data and the objective value by algorithm MDL are much smaller than those by the other existing algorithms TSP, EDF, NETWRAP, AA, and TSCA.
Discussion
It can be seen from Figures 7–16 that the amount of lost data and the value by algorithm MDL are much smaller than those by the existing algorithms, by varying the network size, maximum sensor data rate, charging rate, vehicle travel speed, and the weight of the amount of lost data. The rationale behind this is that algorithm MDL considers the impact of energy depletions of critical sensors. In algorithm MDL, critical sensors will be charged before other sensors. Then, other live sensors can continue to upload their sensing data to the base station. In contrast, sensors in the existing algorithms will be charged by only their residual lifetimes, which ignored the impact of the energy expiration of a critical sensor. When a critical sensor dies, some other live sensors may not be able to upload data, since the critical sensor plays a relay role in the data uploading of the other live sensors. Therefore, the amount of lost data by algorithm MDL is much less than those by the existing algorithms.
On the other hand, algorithm MDL considered not only the amount of lost data, but also the vehicle travel distance. Hence, the weighted sum (i.e. the value) of the amount of lost sensor data and the vehicle travel distance by algorithm MDL is much better than those by the existing algorithms.
Conclusion
In this article, we studied the scheduling of a charging vehicle in a WSN. Unlike existing studies that assumed that the impacts of the energy expirations of different sensors on the sensor network are the same, we notice that some sensors in the network play a critical role in data relay for other sensors, and their energy depletions will significantly impact the data uploading of other sensors. In this article, we take the impact of energy depletions of critical sensors into consideration. We first formulated a novel problem of finding a charging tour, such that the weighted sum of the amount of lost sensor data and the vehicle travel distance is minimized. We then calculated the amounts of lost data for a given charging tour under static routing and dynamic routing, respectively. Also, we proposed a novel algorithm for solving the problem. We finally evaluated the performance of the proposed algorithm by comparing it with the existing algorithms via extensive simulations. The simulation results showed that the proposed algorithm is very promising.
Footnotes
Handling Editor: Giancarlo Fortino
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant No. 61602330), Sichuan Science and Technology Program (Grant Nos 2018GZ0094, 2018GZ0093, and 2017GZDZX0003), and the Fundamental Research Funds for the Central Universities (Grant No. 20822041B4104).
References
1.
HuCWangYWangH.Survey on charging programming in wireless rechargeable sensor networks. J Softw2016; 27(1): 72–95.
2.
XuWLiangWJiaXet al. Maximizing sensor lifetime in a rechargeable sensor network via partial energy charging on sensors. In: Proceedings of the 13th annual IEEE international conference on sensing, communication, and networking (SECON), London, 27–30 June 2016, pp.1–9. New York: IEEE.
3.
XuWLiangWLinXet al. Efficient scheduling of multiple mobile chargers for wireless sensor networks. IEEE T Veh Technol2016; 65(9): 7670–7683.
4.
LiangWLinX.Approximation algorithms for min-max cycle cover problems. IEEE T Comput2015; 64(3): 600–613.
5.
TongBLiZWangGet al. How wireless power charging technology affects sensor network deployment and routing. In: Proceedings of the IEEE 30th international conference on distributed computing systems (ICDCS), Genova, 21–25 June 2010, pp.438–447. New York: IEEE.
6.
TrivediKSrivastavaAK. An energy efficient framework for detection and monitoring of forest fire using mobile agent in wireless sensor networks. In: Proceedings of the IEEE international conference on computational intelligence and computing research, Coimbatore, India, 18–20 December 2014, pp.1–4. New York: IEEE.
7.
XuWLiangWPengJet al. Maximizing charging satisfaction of smartphone users via wireless energy transfer. IEEE T Mobile Comput2017; 16(4): 990–1004.
8.
KursAKaralisAMoffattRet al. Wireless power transfer via strongly coupled magnetic resonances. Science2007; 317(5834): 83–86.
9.
ShiYXieLHouYTet al. On renewable sensor networks with wireless energy transfer. In: Proceedings of the IEEE INFOCOM, Shanghai, China, 10–15 April 2011, pp.1350–1358. New York: IEEE.
10.
FuLHeLChengPet al. ESync: energy synchronized mobile charging in rechargeable wireless sensor networks. IEEE T Veh Technol2016; 65(9): 7415–7431.
11.
PengYLiZZhangWet al. Prolonging sensor network lifetime through wireless charging. In: Proceedings of the IEEE 31st real-time systems symposium, San Diego, CA, 30 November–3 December 2010, pp.129–139. New York: IEEE.
12.
WangCLiJYeFet al. Multi-vehicle coordination for wireless energy replenishment in sensor networks. In: Proceedings of the 27th international symposium on parallel and distributed processing, Boston, MA, 20–24 May 2013, pp.1101–1111. New York: IEEE.
13.
WangCLiJYeFet al. NETWRAP: an NDN based real-timewireless recharging framework for wireless sensor networks. IEEE T Mobile Comput2014; 13(6): 1283–1297.
14.
WangCLiJYeFet al. Recharging schedules for wireless sensor networks with vehicle movement costs and capacity constraints. In: Proceedings of the eleventh annual IEEE international conference on sensing, communication, and networking (SECON), Singapore, 30 June–3 July 2014, pp.468–476. New York: IEEE.
15.
DaiHWuXChenGet al. Minimizing the number of mobile chargers for large-scale wireless rechargeable sensor networks. Comput Commun2014; 46(6): 54–65.
16.
JiangLDaiHWuXet al. On-demand mobile charger scheduling for effective coverage in wireless rechargeable sensor networks. New York: Springer, 2014.
17.
LiangWXuWRenXet al. Maintaining sensor networks perpetually via wireless recharging mobile vehicles. In: Proceedings of the 39th annual IEEE conference on local computer networks, Edmonton, AB, Canada, 8–11 September 2014, pp.270–278. New York: IEEE.
18.
LuSWuJZhangS. Collaborative mobile charging for sensor networks. In: Proceedings of the IEEE 9th international conference on mobile ad-hoc and sensor systems (MASS 2012), Las Vegas, NV, 8–11 October 2012, pp.84–92. New York: IEEE.
19.
RenXLiangWXuW.Maximizing charging throughput in rechargeable sensor networks. In: Proceedings of the 23rd international conference on computer communication and networks (ICCCN), Shanghai, China, 4–7 August 2014, pp.1–8. New York: IEEE.
20.
ZouTXuWLiangWet al. Improving charging capacity for wireless sensor networks by deploying one mobile vehicle with multiple removable chargers. Ad Hoc Netw2017; 63: 79–90.
21.
XieLShiYHouYTet al. Making sensor networks immortal: an energy-renewal approach with wireless power transfer. IEEE/ACM T Netw2012; 20(6): 1748–1761.
22.
AngelopoulosCMNikoletseasSRaptisTP.Wireless power transfer in sensor networks with adaptive, limited knowledge protocols. Comput Netw2014; 70(9): 113–141.
23.
GaoYWangCYangY.Joint wireless charging and sensor activity management in wireless rechargeable sensor networks. In: Proceedings of the 44th international conference on parallel processing (ICPP), Beijing, China, 1–4 September 2015, pp.789–798. New York: IEEE.
24.
KangBCederG.Battery materials for ultrafast charging and discharging. Nature2009; 458(7235): 190–193.
25.
KrishanP.Comparison and performance analysis of dynamic and static clustering based routing scheme in wireless sensor network. Int J Adv Res Comput Comm Eng2013; 2(4): 1808–1012.
26.
LiJMohapatraP.Analytical modeling and mitigation techniques for the energy hole problem in sensor networks. Pervasive Mob Comput2007; 3(3): 233–254.
27.
RenXLiangWXuW.Data collection maximization in renewable sensor networks via time-slot scheduling. IEEE T Comput2015; 64(7): 1870–1883.
28.
DiestelR.Graph theory. Springer-Verlag, 2000.
29.
SomasundaraAARamamoorthyASrivastavaMB. Mobile element scheduling for efficient data collection in wireless sensor networks with dynamic deadlines. In: Proceedings of the 25th IEEE international real-time systems symposium (RTSS), Lisbon, 5–8 December 2004, pp.296–305. New York: IEEE.
30.
LinCZhouJGuoCet al. TSCA: a temporal-spatial real-time charging scheduling algorithm for on-demand architecture in wireless rechargeable sensor networks. IEEE T Mobile Comput2017; 17(1): 211–224.