
Abstract
Received signal strength–based target localization methods normally employ radio propagation path loss model, in which the log-normal shadowing noise is generally assumed to follow a zero-mean Gaussian distribution and is uncorrelated. In this article, however, we represent the simplified additive noise by the spatially correlated log-normal shadowing noise. We propose a new convex localization estimator in wireless sensor networks by using received signal strength measurements under spatially correlated shadowing environment. First, we derive a new non-convex estimator based on weighted least squares criterion. Second, by using the equivalence of norm, the derived estimator can be reformulated as its equivalent form which has no logarithm in the objective function. Then, the new estimator is relaxed by applying efficient convex relaxation that is based on second-order cone programming and semi-definite programming technique. Finally, the convex optimization problem can be efficiently solved by a standard interior-point method, thus to obtain the globally optimal solution. Simulation results show that the proposed estimator solves the localization problem efficiently and is close to Cramer–Rao lower bound compared with the state-of-the-art approach under correlated shadowing environment.
Keywords
Introduction
Wireless sensor networks (WSNs) are composed of a number of sensor nodes which can be further classified into anchor nodes and target node.1,2 In general, the location of the anchor nodes are known, whereas the location of target node is unknown, which needs to be determined. Due to the merit of WSNs for its tiny, low device costs, and multi-functional sensors, it has gained wide applications in various areas such as target tracking, navigation, emergency services, friends finding, and intelligent transportation.3,4 Most of the current positioning approaches for WSNs commonly rely on range measurements between the anchor nodes and target node.5,6 Depending on the available hardware, range measurements can be extracted from different characteristics of the radio signal, 7 such as time of arrival (ToA),8,9 time difference of arrival (TDoA),10,11 angle of arrival (AoA),12,13 and received signal strength (RSS)14–20 or their combination.21–23 Recently, RSS-based localization has received tremendous attention due to its low-cost, low-complexity, and easy-implementation solution. 24 Maximum likelihood (ML)25,26 and least squares (LS)17,18 are two typical estimators based on RSS measurements. Although the ML estimator is very important due to its asymptotic normality performance, the ML estimator is non-convex and has multiple local optimal solutions. Moreover, it depends highly on the initial point, and a poor initialization commonly leads to bad effects in WSNs, making it difficult to find the globally optimal solution. To overcome those problems, the LS estimator is put forward. Though the LS estimator is much easier and has explicit solution, its accuracy is not as good as the ML estimator, especially when the variance of the measurement noise is large.
Recently, some other methods have been proposed, of which there are the semi-define programming (SDP) relaxation 16 and second-order cone programming (SOCP) relaxation.17,18 The basic idea of these methods is to transform the objective function into a convex problem via SDP/SOCP relaxation, then the globally optimal solution of wireless localization problem can be efficiently solved.27,28 To circumvent the non-convexity of ML estimator, Ouyang et al. 16 reformulate the problem by eliminating the logarithm and relaxing it as an SDP optimization problem. Tomic et al.17,18 propose methods to solve the localization problem by converting the original ML non-convex problem into an SOCP convex optimization.
As we know, most of localization algorithms are based on the radio propagation path loss model with the noise generally assumed identically independent distributed (i.i.d.) and they follow a zero-mean Gaussian distribution. However, the noise is not always uncorrelated, especially in complex environment such as indoor environment or forest environment.29–31 Thus the algorithm based on traditional uncorrelated noise would result in bed effects in WSNs.
In this article, we design an SOCP/SDP estimator for the RSS-based localization problem while the noise is spatially correlated. It shows that when the correlation is taken into consideration among the RSS measurements, the accuracy of localization is improved. 32 First, we present the corresponding ML estimator for the RSS measurements model. Then, we derive a non-convex objective function based on weighted least squares (WLS) criterion but has no logarithm in the objective function. It demonstrates that the developed objective function can be transformed into a convex estimator by applying SOCP and SDP relaxation technique, which can be solved exactly by using the MATLAB package CVX, 33 where the solver is SeDuMi 34 or SDPT3. 35 Simulation results show that the proposed convex estimator efficiently solves the localization problem and confirms the effectiveness compared with the state-of-the-art approach.
Notation
The following notations are adopted throughout the article. Bold-face lower case letters and bold-face upper case letters denote the vectors and matrices, respectively.
System model and problem formulation
Log-normal shadowing path loss model
We consider WSNs of

The
For

where

where
Problem formulation
The resulting joint ML estimation of target location

where
It is clear that the ML estimator equation (3) is non-convex and difficult to find the global minimum solution. In this article, we propose a new estimator to solve this problem.
Localization via convex relaxation
In order to develop a convex estimator, we first introduce the following Lemma.
Lemma 1
If
Lemma 2
The norm
To develop efficient method for tackling the problem (3), we formulate the target localization problem as the following WLS problem

Because of

Then, from equations (4) and (5), we get

According to Lemma

where

Since

Then the primal optimization problem (4) can be expressed as



By introducing auxiliary variables





Clearly, the minimization problem (10) is still non-convex and difficult to solve, since the constraints (10b), (10c), (10d), and (10e) remain non-convex. However, we can use SOCP and SDP relaxation technique to relax





Problem (11) is an SOCP/SDP convex problem and can be efficiently solved by a standard interior-point method. 38
Complexity analysis
There exists inherent trade-off between the estimation accuracy and the implementation complexity among all proposed estimators. The estimator for the worst-case complexity of the mixed SD/SOCP 38 is used to analyze the complexities of the proposed estimator and other considered estimators in this article. The formula of computing complexities is given here

where
Summary of the considered methods.

WLS: weighted least squares; SOCP: second-order cone programming; SDP: semi-define programming; LS: least squares.
Average running times of various methods (s).

WLS: weighted least squares; SOCP: second-order cone programming; SDP: semi-define programming.
Simulation results
In this section, computer simulation results are provided to compare with the performance among the discussed estimators including “UT-WLS” by Wang and Yang,
14
“SOCP2” by Tomic et al.,
17
“SDP” by Ouyang et al.,
16
“SDP-correlated” by Vaghefi and Buehrer
19
and the proposed estimator denoted as “SOCP/SDP-NEW.” Cramer–Rao lower bound (CRLB) is given as performance comparison benchmarks.39,40 For convenience, the discussed estimators are listed in Table 3. It is better mentioning that for the sake of fairness, the propagation model (1) is used to generate the range measurements. The anchor nodes are assumed uniformly to locate at a circle with radius

where
Summary of the compared methods.
WLS: weighted least squares; SOCP: second-order cone programming; SDP: semi-define programming.
Figure 2 illustrates the cumulative distribution function (CDF) of localization comparison of the proposed estimator when uncorrelated case, that is,
The cumulative distribution function (CDF) of localization error for compared estimators when standard deviation
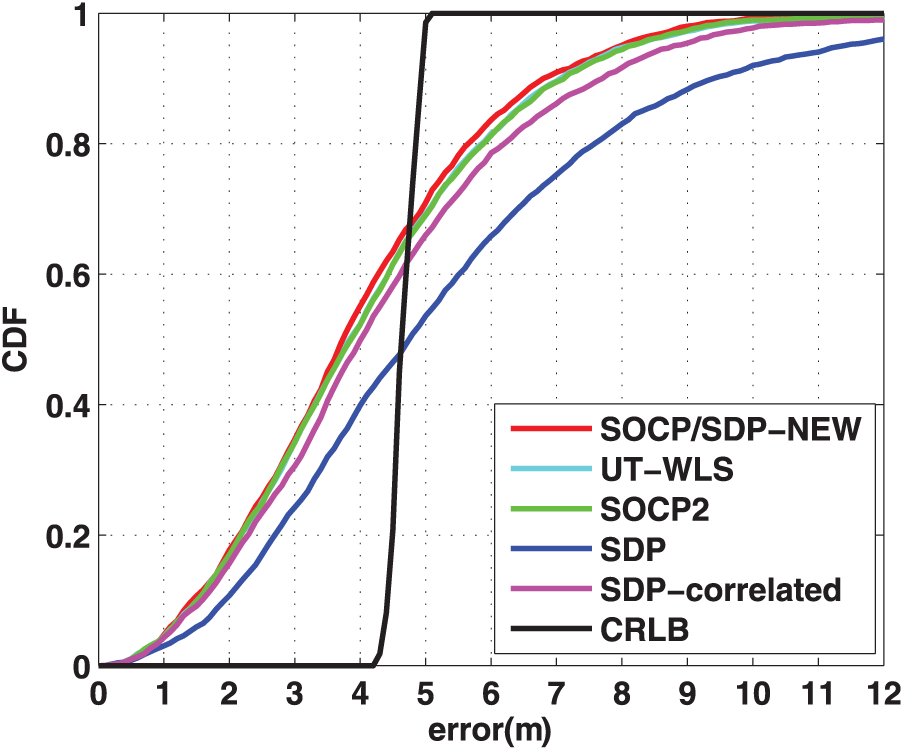
In Figure 3, we plot the CDF of localization comparison of the proposed estimator when shadowing highly correlated. Just like the aforementioned case, the log-normal shadowing term are generated using equation (13), its SD and correlation coefficient were

The CDF of localization error for compared estimators when the noise standard deviation
Figure 4 illustrates the RMSE versus the noise SD
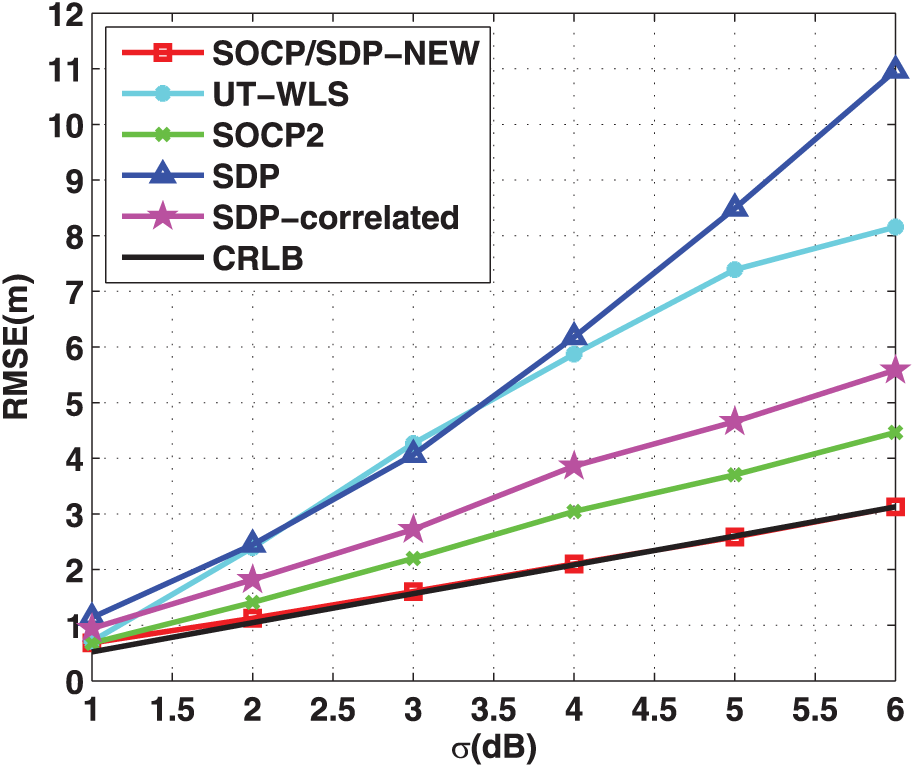
Root-mean-square error (RMSE) versus the noise standard deviation
For the sake of completeness, Figure 5 is provided to compare the RMSE versus the number of anchor nodes. In this scenario, the noise SD is fixed as
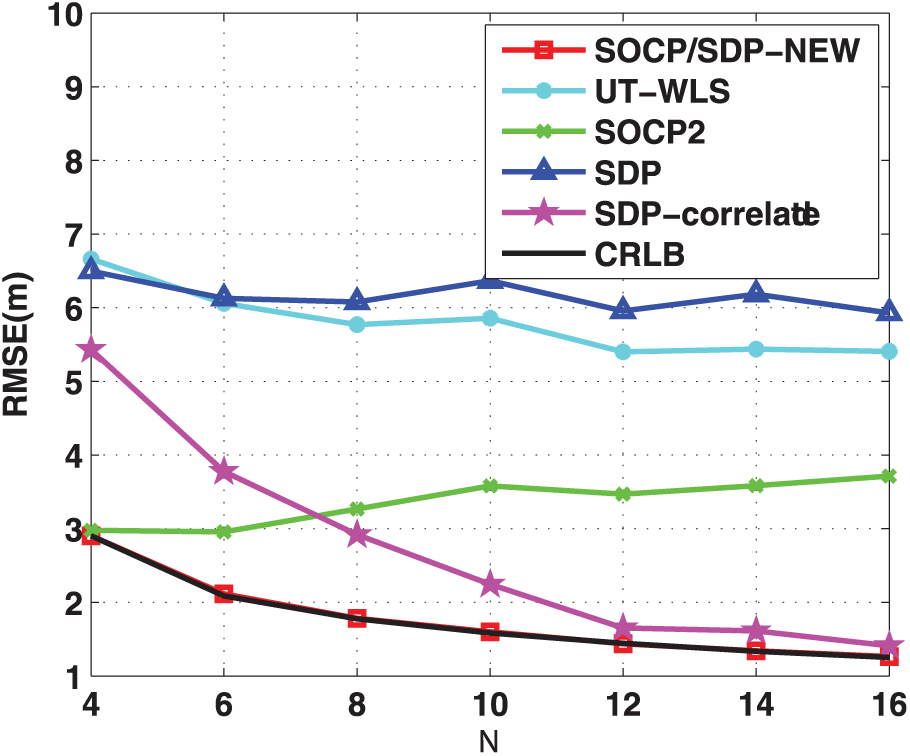
RMSE versus the number of anchor nodes N when the noise standard deviation
To show the effect of spatially correlated shadowing on localization accuracy, Figure 6 compares the RMSE versus the correlation coefficient

RMSE versus the correlation coefficient
In summary, simulation and theoretical results verify that the proposed “SOCP/SDP-NEW” estimator provide the best performance versus the noise SD, the number of anchor nodes, and the correlation coefficient, respectively, under correlated shadowing environment.
Conclusion
In this article, we consider the log-normal shadowing noise in RSS measurements model and examined its effects under correlated shadowing environment. Based on this model, we investigated the localization problem in WSNs and put forward a new convex estimator. In order to avoid the ML estimator convergence problem, we first developed a non-convex objective function from the RSS measurements model under correlated shadowing environment. Then, we show that the developed objective function can be transformed into a convex estimator by applying SOCP and SDP relaxation technique. Computer simulations were conducted to compare the proposed SOCP/SDP estimator with the other previously discussed estimators. Simulation results show that the proposed convex estimator is better than the other discussed estimators and its performance is very close to the CRLB. In short, the proposed estimator exhibited an excellent performance for RSS-based wireless localization under correlated shadowing environment.
Footnotes
Handling Editor: Antonio Lazaro
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported in part by the National Natural Science Foundation of China (grant no.: 61571250), the Zhejiang Natural Science Foundation (grant no.: LY18F010010), and the K. C. Wong Magna Fund in Ningbo University.