
Abstract
Location awareness is the key to success to many location-based services applications such as indoor navigation, elderly tracking, emergency management, and so on. Trilateration-based localization using received signal strength measurements is widely used in wireless sensor network–based localization and tracking systems due to its simplicity and low computational cost. However, localization accuracy obtained with the trilateration technique is generally very poor because of fluctuating nature of received signal strength measurements. The reason behind such notorious behavior of received signal strength is dynamicity in target motion and surrounding environment. In addition, the significant localization error is induced during each iteration step during trilateration, which gets propagated in the next iterations. To address this problem, this article presents an improved trilateration-based architecture named Trilateration Centroid Generalized Regression Neural Network. The proposed Trilateration Centroid Generalized Regression Neural Network–based localization algorithm inherits the simplicity and efficiency of three concepts namely trilateration, centroid, and Generalized Regression Neural Network. The extensive simulation results indicate that the proposed Trilateration Centroid Generalized Regression Neural Network algorithm demonstrates superior localization performance as compared to trilateration, and Generalized Regression Neural Network algorithm.
Keywords
Introduction
Wireless sensor network (WSN) is an important technology of 21st century that can do smart sensing and ubiquitous computing, and has plenty of localization and tracking (L&T)-based applications.1,2 The measurements collected are useful only if knowledge of source of data is known. Therefore, the underlying target localization mechanism plays very crucial role in the WSN-based applications. The L&T is one of the core application areas of the WSN. Although GPS is widely used for localization in outdoor environment, GPS-based location estimates are not accurate and reliable for indoor environmental setup.3,4 The reason behind this is unavailability of GPS signals in indoor environment. Consequently, the indoor L&T applications require GPS-less architecture. The low cost and low power WSN technology is proved to be very useful to address the problem of indoor L&T. The WSN-based localization has two major categories namely, range-free and range (distance)-based.5,6 The range-free localization is based on relationship between inter node connectivity and network topology, whereas the range-based approach is based on computing the distances between sensor nodes. Generally, the localization accuracy is high in latter approach. Out of all the major range-based techniques, the received signal strength indication (RSSI)-based approach is widely used in the WSN-based L&T. The major reason behind this is that unlike other methods, the RSSI-based system does not need additional hardware in the process of localization. The term RSS and RSSI are one and the same, and we use these words interchangeably in the article. Although the RSSI is a widely used metric for target L&T, it generally leads to high localization errors due to highly fluctuating nature of the RSSI measurements, and dynamicity in given radio frequency (RF) environment.7,8
The trilateration technique is widely used in target L&T because of its implementation simplicity, and low computational complexity.9–11 It can estimate the unknown target location with the help of its distances from three anchors (the nodes whose locations are known) using RSSI measurements. Many variations in traditional trilateration-based target localization technique can be found in the literature. However, either due to ignorance to error uncertainty propagation mechanism or the environmental dynamicity, improvement in the localization accuracy is poor or unsatisfactory.
Depending on the application in hand, the requirement of localization accuracy may change. For example, if it is a marketing/advertisement case, then roughly a 5–10 m should serve the purpose. On the other hand for industrial applications, localization accuracy below 1 m may be required. In this article, we propose centroid and Generalized Regression Neural Network (GRNN)-based improved trilateration localization algorithm. The main contributions of this research work are listed below.
We formulated a novel framework based on the trilateration, GRNN, and centroid for the problem of RSSI-based localization of single target moving in indoor environment. We named it as Trilateration Centroid Generalized Regression Neural Network (TCGRNN).
The proposed TCGRNN algorithm is tested and verified against dynamicity in the surrounding environment as well as target motion through MATLAB simulations. To realize dynamicity in the RSSI measurements, we increased measurement noise in RSS from 3–9 dB in the steps of 3 dB.
We compared the localization performance of the proposed TCGRNN algorithm with that of traditional trilateration and our previous GRNN-based localization algorithm for high RSSI measurement noise of 9 dB. Simulation and numerical results demonstrate that the proposed TCGRNN algorithm better deals with the environmental dynamicity (i.e. high measurement noise in RSS) and abruptly varying target velocity as compared to trilateration and GRNN.
The remaining structure of the article is as follows. Section “Related work” covers the current state of art in the RSSI-based target L&T followed by the discussion on the proposed TCGRNN architecture in section “TCGRNN architecture for target localization.” We present system design and results obtained with proposed algorithm in detail through extensive simulations in section “System design and assumptions of TCGRNN-based L&T system” and section “Discussion on results,” respectively, followed by conclusions at the end in section “Conclusion and future scope.”
Related work
As mentioned in the “Introduction” section, the trilateration technique is widely used in target L&T because of its implementation simplicity, and low computational complexity. The base for the work in Bouchard et al. 9 is the idea: smaller the error in distance estimation, the higher the location estimation quality. This method selects three smallest estimated distance values to formulate trilateration equations for localization. However, the applicability of these equations with the real-time environment is poor. In Li et al., 10 an advanced trilateration-based technique is proposed to alleviate the problem non-existence of intersection points during trilateration steps. This work is based on establishing a proper confidence interval. An improved trilateration localization algorithm named ITL-MEPOSA is proposed in Yan et al. 11 which is based on optimized selection of anchors and minimum uncertainty propagation arising from distance estimation result. With ITL-MEPOSA, the optimized selection of anchor nodes is attained through a single scan-sliding window. Although ITL-MEPOSA algorithm provides high target location estimation accuracy as compared to trilateration, but computational complexity involved is quite high. Although coupled with various advantages, the localization accuracy of the trilateration method is influenced by three factors:9–11
Noise uncertainty in RSSI measurements: It arises due to issues such as NLOS condition, attenuation of RF signal, multipath fading,
Non-linear system dynamics: Due to fluctuations in RSSI measurements and abrupt variations in target velocity,
Error propagation: It occurs especially in the tracking problem in which the localization error induced during each iteration step gets accumulated and propagated in the subsequent iterations.
Many times, the calibration of parameters of given RF environment of the theoretical signal propagation model is very difficult and time consuming process. The major reason for inaccurate computation of calibrated parameters is highly fluctuating nature of RSSI measurements and non-linear system dynamics. The work in Mari et al. 12 proposed a novel kernel online sequential extreme learning machine (KOS-ELM) technique for RF fingerprinting in the offline stage, followed by a hybrid wireless LAN-based approach during online localization stage. The proposed algorithm incorporates both RF fingerprinting and trilateration for target localization, followed by K-nearest neighbor (KNN)-based approach for online estimation of location of the target. Systems that use RSSI measurements for localization adopt RF fingerprinting for calibration of given RF environment. But it is very time consuming process, and if the calibration is inaccurate, then it leads to high localization errors. The authors in Barsocchi et al. 13 proposed two novel virtual calibration techniques which only need the RSSI measurements between anchors for the calibration of given RF environment. The authors named these as global virtual calibration (G-procedure) and per-wall virtual calibration (W-procedure). The simulation experiments carried out demonstrate the improved localization performance as compared to time consuming RF fingerprinting-based approach. The authors in Crane et al. 14 proposed a novel filtering technique Emender that identifies the noisy RSSI measurements which effect the localization performance adversely. Based on the proposed Emender-based approach, a novel trilateration approach is adopted for indoor localization. The real-time experiments in a building using Emender-based system demonstrate accurate location estimate of the target with less time complexity.
To deal with above problems, the traditional trilateration technique must be coupled with some appropriate advanced signal processing technique to solve the problem of RSSI-based target L&T. Looking the L&T problem from another perspective, the concept of centroid can be very useful to provide accurate estimate if the underlying RSSI dataset is sparse.15,16 Recently the weighted centroid-based localization (WCL) using RSSI measurements has been found to be an attractive low complexity solution for target L&T.15,16 The WCL-based localization algorithm uses position of anchors that are in the communication radius of unknown node whose position is to be estimated. The WCL algorithm generally yields low localization accuracy, especially if the unknown node is outside a polygon established by the anchors. Some researchers have proved that by fusing the centroid concept with some other existing localization framework, the localization error can be significantly reduced. The authors in Phoemphon et al. 15 have proposed a fuzzy-based centroid localization (FCL) algorithm for localization. In proposed FCL, the anchor nodes are prioritized using fine-tuned weights. In Zhang et al., 16 the authors proposed a particle centroid drift (PCD) algorithm for large-scale WSN with an objective to reduce the distance estimation errors. In PCD-based system, centroid algorithm is combined with particle distribution function to form in high-quality particles.
We know that artificial neural network (ANN) once trained with appropriate dataset can deal with almost any non-linear system dynamics.17,18 The authors in Zhou et al.
19
designed a novel hybrid hypothesis test based on the idea of asymptotic relative efficiency (ARE), which takes into account the signal distributions from different Wi-Fi access points. In this research work, the Jarque-Bera (JB) test is utilized to perform the normality test on the Wi-Fi signal distribution, and then to obtain contribution degree of each access point, the chi-square automatic interaction detection (CHAID) approach is adopted. The target location estimates are obtained by using the KNN. The extensive experimental results using the proposed approach lead to higher localization accuracy and enhanced robustness as compared with other existing Wi-Fi-based localization techniques. Choosing appropriate ANN architecture for the given indoor L&T application is very crucial. The GRNN is found to be suitable to variety of target L&T applications involving highly non-linear system dynamics.20,21 Unlike other ANN architectures, the GRNN has only one control parameter. That is GRNN smoothing factor. We have previously used the concept of GRNN and applied it in several ways to solve the problem of single mobile target L&T. For instance, we proposed and verified two algorithms namely GRNN + KF and GRNN + UKF to address uncertainty in RSSI measurement noise in Jondhale and Deshpande.20,21 In these works, the GRNN architecture is trained with training dataset that consists of input vectors (four RSSI measurements) and corresponding output vector (actual 2D locations of target). Here the location estimates obtained with developed GRNN architecture are applied to KF and UKF to further smooth the GRNN location estimates. These GRNN + KF and GRNN + UKF algorithms are also validated in a real-time experiment carried out in our institute laboratory.
20
In this experiment, we proved that the moving person can be tracked efficiently using wireless communication network formed using smartphone and PSOC BLE nodes. Although the algorithms presented in show improved localization results than that with trilateration, GRNN, RSSI + KF, and RSSI + UKF algorithms, the RSSI measurement noise is kept constant (i.e. 3 dB). Motivated by the benefits of trilateration, GRNN, and centroid concept, we propose novel TCGRNN architecture for indoor target L&T problem. Unlike Jondhale and Deshpande,20,21 to focus only the architectural design aspect, we have not fused the proposed TCGRNN architecture with KF framework in this work. Unlike our previous GRNN architecture, input vector dimension for the proposed TCGRNN architecture is made 8. Unlike localization analysis in our previous works,20,21 a new parameter for localization performance evaluation is introduced (i.e. regression coefficient
TCGRNN architecture for target localization
The RSS used in this research work is generated using log normal shadow fading model (LNSM) as given below20,21

where,
Trilateration is the traditional process of localization wherein the target location can be computed using its distances from at least three anchor nodes (say

Solving above equations for

where


It is well known that the GRNN can converge any linear or non-linear regression surface (sparse datasets) very quickly. For estimating output, it measures the distance of given input vector from vectors used in the training dataset. The detailed study of GRNN can be found in Jondhale and Deshpande.20,21 In this work, we designed the proposed TCGRNN architecture by fusing the ideology of trilateration and centroid in it (see Figure 1). The input to the proposed TCGRNN is
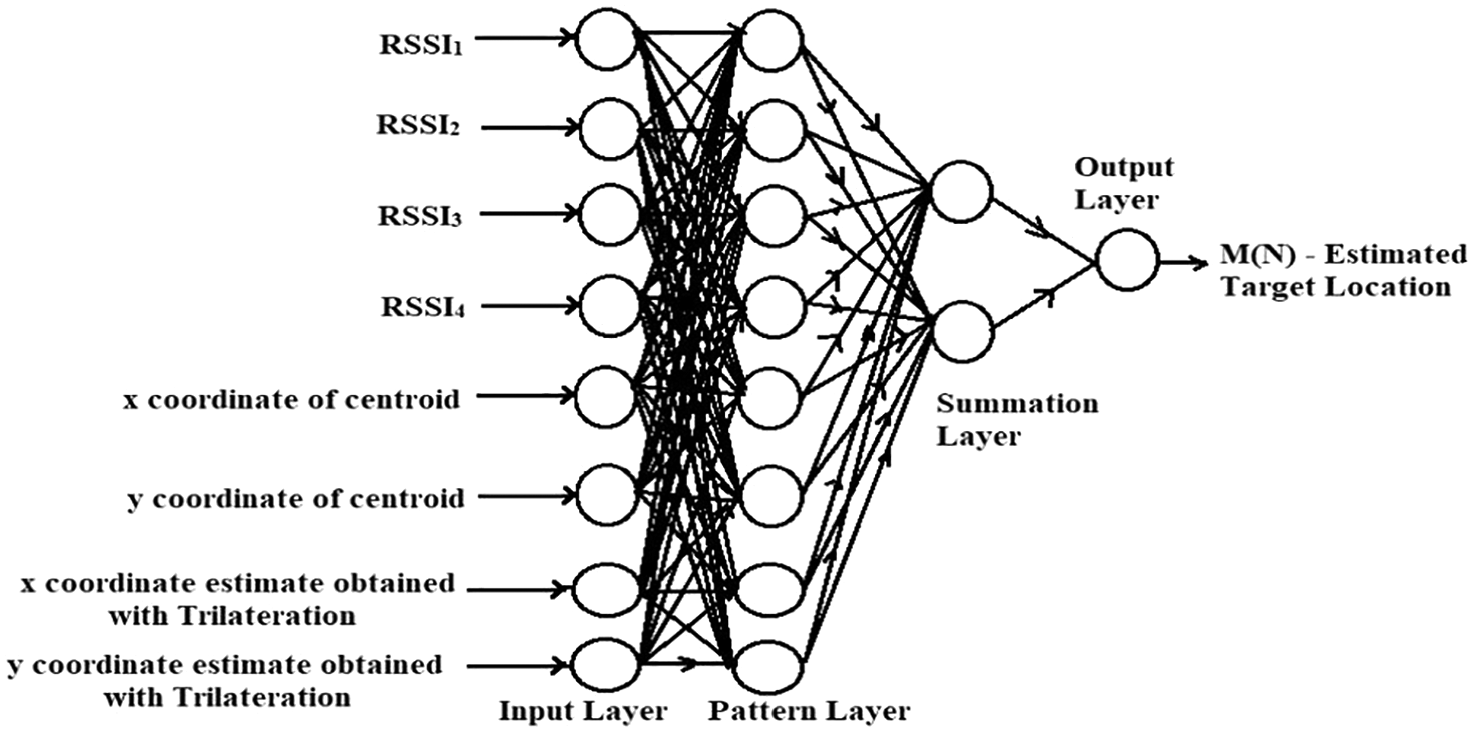
Proposed TCGRNN architecture for target L&T.
The mathematical equations for estimations with TCGRNN architecture are the same as that with GRNN architecture. These are as given below
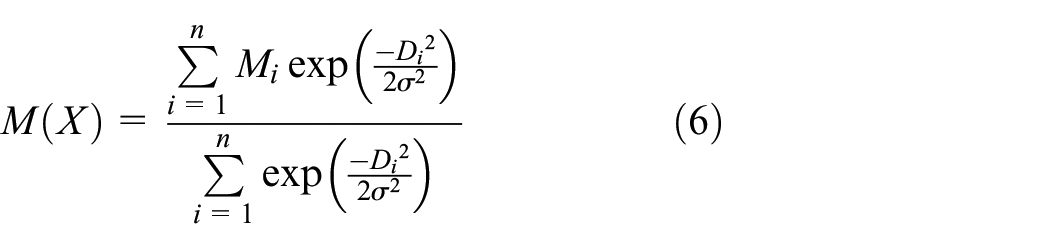

where
Choosing appropriate value of
System design and assumptions of TCGRNN-based L&T system
In this work, an indoor area of 100 m × 100 m is simulated using MATLAB 2016a as shown in Figure 2. Total 16 WSN nodes are assumed to be utilized for the proposed target L&T problem, out of which 15 are considered to be anchor nodes. The remaining one node is assumed to be carried by the target during motion. All the anchor nodes are supposed to be configured in transmitter mode, whereas the node carried by the mobile target is assumed to be configured in receiver mode. The anchor nodes are deployed at locations as given in Table 1 and shown in Figure 2. The anchor node locations randomly chosen in the given indoor layout of 100 m × 100 m are static in nature. Changing the locations of these anchor nodes can change RSSI measurements received at the mobile target. The deployment of anchor nodes is kept same during training as well as testing of the proposed TCGRNN localization architecture for the considered indoor target tracking problem. So we believe that changing anchor location deployment setup might not have huge impact on the localization performance. The total number of unknown target locations to be estimated in this work is 35. The location estimations are carried out using trilateration technique, GRNN algorithm, and the proposed TCGRNN algorithm. Figure 3 illustrates the proposed TCGRNN architecture-based L&T system.

Simulated indoor environment and deployment of 15 anchors.
Deployment of anchor nodes in the simulations.


System block diagram of TCGRNN-based target L&T system.
The operational difference between the GRNN architecture and TCGRNN architecture is input vector. The input vector for GRNN architecture consists of any four random RSSI measurements (see equation (8)), whereas input vector for TCGRNN architecture includes the same four random RSSI measurements, and centroid coordinates of anchors which produced those four RSSI measurements (see equation (9)). Thus, the input vector dimensions for GRNN and TCGRNN architectures are 4 and 8, respectively


where
Let us consider the coordinates of anchors who generated

The GRNN and TCGRNN architectures are trained with the help of 75 sets of input vector (field measurements) and corresponding output vector (actual 2D location of target corresponding to those field measurements) (see Figure 3). This training dataset is obtained through one any random trial of target motion as described by equations (11)–(16). Once the proposed TCGRNN is trained, it is ready for any random input vector generated during real-time target motion in the online localization stage, whereas the trilateration technique does not need such training prior to its real-time application. The Figure 3 is also applicable for GRNN-based L&T system. To visualize GRNN-based L&T system, all we have to replace TCGRNN architecture box by GRNN box, and
The state of moving target at time instant


where




To evaluate the localization performance of the proposed TCGRNN algorithm, two parameters are considered namely, average localization error and root mean square error (RMSE). For every

where



Discussion on results
To realize the real-time indoor environment,
Case I:
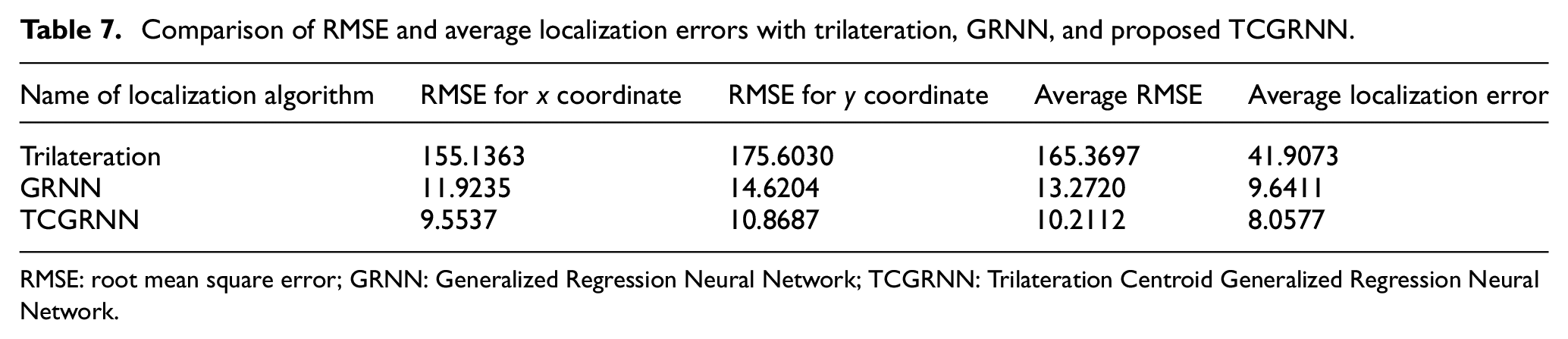
Comparison of RMSE and average localization errors with trilateration, GRNN, and proposed TCGRNN.

RMSE: root mean square error; GRNN: Generalized Regression Neural Network; TCGRNN: Trilateration Centroid Generalized Regression Neural Network.
Comparison of estimations of sample target locations with trilateration, GRNN, and proposed TCGRNN.

GRNN: Generalized Regression Neural Network; TCGRNN: Trilateration Centroid Generalized Regression Neural Network; CGRNN: Centroid Generalized Regression Neural Network.
Comparison of R values obtained with trilateration, GRNN, and proposed TCGRNN algorithms through linear regression.

GRNN: Generalized Regression Neural Network; TCGRNN: Trilateration Centroid Generalized Regression Neural Network; L&T: localization and tracking.
Comparison of RMSE and average localization errors with trilateration, GRNN, and proposed TCGRNN.

RMSE: root mean square error; GRNN: Generalized Regression Neural Network; TCGRNN: Trilateration Centroid Generalized Regression Neural Network.
Comparison of R values obtained with trilateration, GRNN, and proposed TCGRNN algorithms through linear regression.

GRNN: Generalized Regression Neural Network; TCGRNN: Trilateration Centroid Generalized Regression Neural Network; L&T: localization and tracking.
Comparison of RMSE and average localization errors with trilateration, GRNN, and proposed TCGRNN.
RMSE: root mean square error; GRNN: Generalized Regression Neural Network; TCGRNN: Trilateration Centroid Generalized Regression Neural Network.
Comparison of R values obtained with Trilateration, GRNN, and proposed TCGRNN algorithms through linear regression.

GRNN: Generalized Regression Neural Network; TCGRNN: Trilateration Centroid Generalized Regression Neural Network; L&T: localization and tracking.
Figure 4 plots actual target track, and corresponding location estimates obtained with trilateration, GRNN, and TCGRNN methods. Here, black dark circles are anchor nodes that continuously broadcast RF signal to be received by mobile target node. The red square indicates 35 actual target locations during its motion, whereas blue plus, black plus, and green plus symbols are the location estimations with trilateration, GRNN, and the proposed TCGRNN architecture, respectively, against these 35 actual target locations. The overall (average) localization error in estimating

Case I: Comparison of target location estimations using trilateration, GRNN, and TCGRNN.

Case I: Plot of average localization errors with trilateration, GRNN, and TCGRNN.
We want to highlight few important observations regarding the result in Figure 4.
For few locations, the estimation with TCGRNN can be seen, but the corresponding GRNN-based estimates are not visible. The reason behind this is that the estimations with GRNN and TCGRNN are almost the same. To clarify this observation, kindly check estimation results of GRNN and TCGRNN for target location 8 (24, 45) (refer Table 3). For location 8, the estimation results with GRNN and TCGRNN are almost the same and are (23.97, 44.45) and (24, 45), respectively. For remaining locations, the results with trilateration, GRNN, and TCGRNN are distinct (for instance, kindly refer estimation results for location 1, location 27, and location 35 (see Table 3)).
Few location estimates of target with trilateration are not seen. The reason behind this is that the location estimates obtained with trilateration are out of the considered WSN area. For location 8 (24, 45), the location estimate obtained with trilateration is (285.88, −128.54) (refer Table 3).
Figures 6 and 7 plot regression of
Case II:
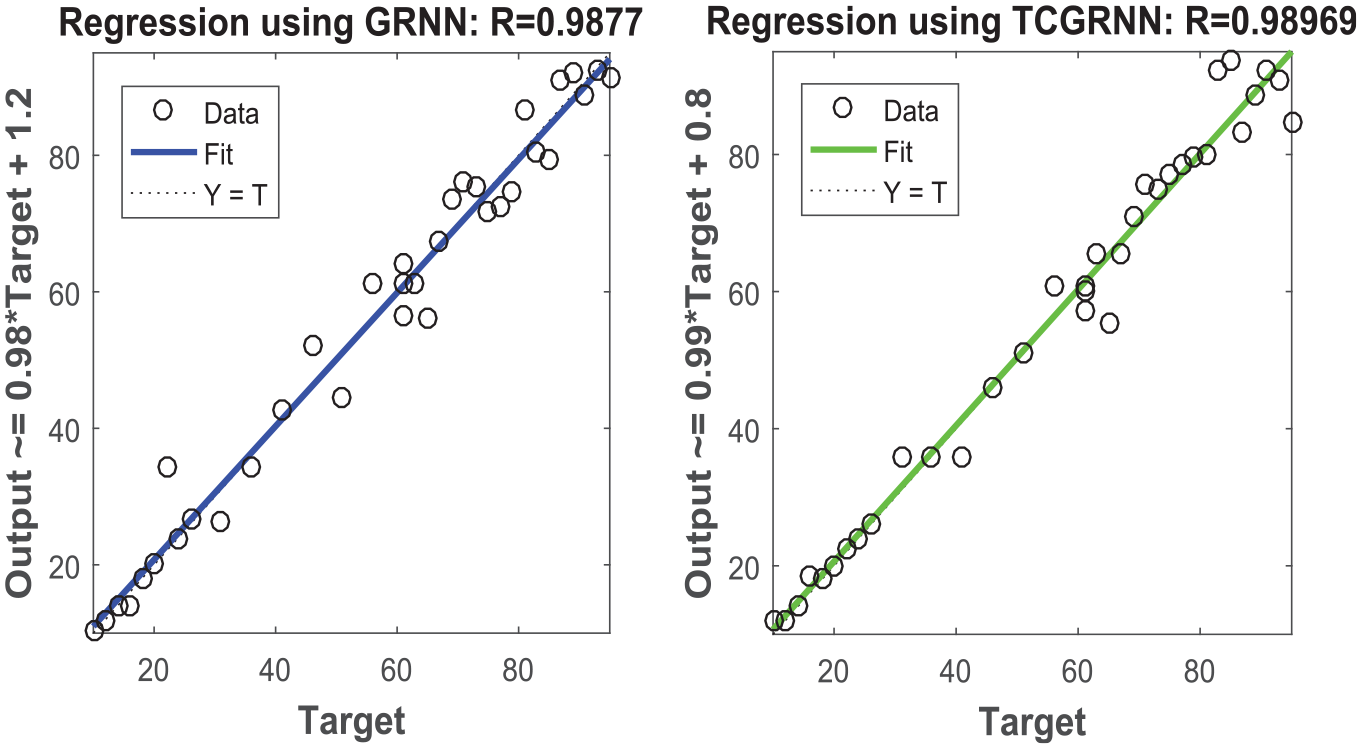
Case I: Comparison of regression in x coordinate estimation for GRNN and TCGRNN.

Case I: Comparison of regression in y coordinate estimation for GRNN and TCGRNN.
Figure 8 illustrates the comparison of location estimations with TCGRNN, GRNN, and trilateration techniques. By comparing Figure 8 (Case II) with Figure 4 (Case I), one can conclude that as the measurement noise in RSSI is doubled, the localization errors are also increased. However, significant rise in localization error can be noted down in case of trilateration only (see Table 5). The % rise in localization error with TCGRNN is lowest as compared to that with trilateration and GRNN. Figure 9 plots average localization errors with trilateration GRNN and TCGRNN. From Figure 9, we can see that the highest localization error with the traditional trilateration, GRNN, and the proposed TCGRNN is approximately 200, 25, and 22 m, respectively, whereas lowest localization error with the traditional trilateration, GRNN, and the proposed TCGRNN is approximately 4, 3, and 0 m, respectively. Thus, the proposed TCGRNN architecture outperforms the rest of the other two techniques. Figures 10 and 11 plot regression of
Case III:

Case II: Comparison of target location estimations using trilateration, GRNN, and TCGRNN.

Case II: Plot of average localization errors with trilateration, GRNN, and TCGRNN.

Case II: Comparison of regression in x coordinate estimation for GRNN and TCGRNN.

Case II: Comparison of regression in y coordinate estimation for GRNN and TCGRNN.
Figures 12 and 13 illustrate the comparison of location estimations and average localization errors with TCGRNN, GRNN, and trilateration techniques, respectively, whereas Figures 14 and 15 show the comparison of regression for GRNN and TCGRNN in

Case III: Comparison of target location estimations using trilateration, GRNN, and TCGRNN.

Case III: Plot of average localization errors with trilateration, GRNN, and TCGRNN.

Case III: Comparison of regression in x coordinate estimation for GRNN and TCGRNN.

Case III: Comparison of regression in y coordinate estimation for GRNN and TCGRNN.
Speaking about the efficacy of the proposed TCGRNN algorithm, although it ranges in the scale of 3–10 m in the three cases, it is certainly far better than the traditional trilateration technique. In addition, the localization accuracy of the proposed TCGRNN architecture is also better than the GRNN architecture in all the investigated cases (see Tables 2–8). From these numeric results, it is clearly observed that as the measurement noise in RSSI goes beyond 6 dB, the traditional trilateration technique yields worst localization results (i.e. average RMSE = 165.3697, and average localization error = 41.9073) (see Table 7) as compared to GRNN and TCGRNN. Thus, the traditional trilateration technique is not at all recommended for highly dynamic RF environment with measurement noise in RSSI greater than 6 dB. Augmenting four extra parameters (i.e. centroid and trilateration-based estimation) in input vector for TCGRNN architecture certainly improves the target localization performance as compared to that with plain GRNN architecture.
Conclusion and future scope
This article presents a novel improved trilateration technique based on TCGRNN architecture to deal with the issues of dynamic RF channel and non-linear system dynamics to solve the problem of indoor L&T of a mobile target. To realize uncertainty in the noise in RSSI measurements, the normal random variable parameter in LNSM path loss model is varied from 3–9 dB in the steps of 3 dB during simulations (Case I, Case II, and Case III). The extensive simulation results prove that the proposed improved trilateration-based TCGRNN architecture demonstrates superior localization performance as compared to trilateration and even GRNN architecture. Looking at localization from another perspective, we know that depending on the application in hand, the requirement of localization accuracy may change. For example, if it is a marketing/advertisement case, then roughly a 5–10 m should serve the purpose. On the other hand, for industrial applications, localization accuracy below 1 m may be required. Yes, we believe that the localization accuracy for the proposed TCGRNN architecture-based algorithm can be improved further by fusing the results with some more advanced technique such as Kalman filter or its variants such as Extended Kalman Filter (EKF) or Unscented Kalman Filter (UKF). Thus, the proposed TCGRNN architecture-based localization system is useful in localization applications wherein the demand of localization accuracy is in the range of 3–8 m. The proposed TCGRNN architecture can also be applied to multitarget tracking scenario in indoor environment. We believe that fusing the proposed TCGRNN architecture with KF framework may further refine localization accuracy to the scale of 1 m, and it even can solve the problem of 3D localization of the target.
Footnotes
Handling Editor: Peio Lopez Iturri
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.