
Abstract
The surveillance system, which is mainly used for detecting and tracking moving targets, is one of the most significant applications of wireless sensor networks. Up to present, received signal strength indicator is the most common measuring mean for estimating the distance in sensor networks. However, in the presence of noise, it is impossible to gain the accurate distance based on received signal strength indicator. In this article, we propose a new tracking scheme based on received signal strength difference, which is the difference value of received signal strength indicators between two neighboring sampling steps. Supposing the noise has a certain degree of correlation in a certain time interval, received signal strength difference can effectively reduce the negative impact from noise. The tracking algorithm based on received signal strength difference is built: The sensor nodes collectively estimate a possible zone of the target via the signs of received signal strength difference. Next, the possible zone is further immensely shrunk to the refined zone via the absolute values of received signal strength difference. Finally, we determine the target’s final location by choosing the reference dot with the minimum norm in the refined zone. The simulation results demonstrate that the proposed tracking method achieves higher localization accuracy than the typical received signal strength indicator–based scheme. The received signal strength difference–based method also has good generality and robustness with respect to the noises with different deviation values and the target following arbitrarily state model.
Keywords
Introduction
Wireless sensor networks (WSNs) are composed of numerous low-power sensor nodes, which have captured the attention of many researchers in recent years. WSNs have been deployed to perform many applications including environmental monitoring, 1 remote health care, 2 and building automation. 3 These small and smart sensor nodes are particularly suitable for the localization system design.4–6 Especially, modern tracking problems in WSNs are of great importance in a variety of surveillance scenes, security applications, and intelligent monitor systems. 7
Localization is the procedure for calculating the absolute or relative physical position of the sensor node or the target. Global positioning system (GPS) can provide precise position data. 8 However, installing GPS receiver in a large-scale distribution system is costly. And a sensor node is extremely limited in hardware, and battery power is required by GPS. 9 Furthermore, GPS is only available for outdoors, and it occupies large space on the sensor nodes. 10 All of these disadvantages of GPS make it unsuitable for localization in WSNs. A quantity of localization methods including range-based and range-free methods have been studied by researchers in recent years. Range-based approaches depend on costly hardware to estimate distances or angles with high precision.11,12 In contrast, range-free approaches are more cost-effective to estimate a node’s or a target’s location but with less accuracy. 13 However, since most WSNs’ applications involve relative dynamic environments, localization in range-free approaches could be disturbed.
Received signal strength indicator (RSSI) is a common and efficient range-based measurement, which estimates the distance based on the signal strength received by the sensor node.
14
Theoretically, the signal strength is inversely proportional to the power of distance. The greater the distance to the receiver node, the smaller the signal strength arriving at that node. The mathematical relationship between the signal strength and the distance can be described by an isotropic signal intensity attenuation (ISIA)
15
model. However, in real-world environments, RSSI is highly influenced by the noise, which makes the mathematical model untrustable. Experiments in Savvides et al.
16
have shown that the estimation error using RSSI is from
We propose a brand new tracking method based on received signal strength difference (RSSD) to estimate the trajectory of the mobile target under the supervision of WSNs. The RSSD method is figured out by the difference value of two RSSIs corresponding to two diverse sampling times of one particular sensor node, instead of using one single RSSI at one sampling time. It is assumed that the noise at one sampling time is correlated to the noise at the previous sampling time, because the noise derived from devices and environment shows continuity and regularity up in practical measurement. The motivation of our method is to reduce the noise impact on measurement by taking advantage of RSSD.
The RSSD-based localization algorithm is designed as follows: First, through the sign of RSSD, reflecting the changing trend of RSSI, we define a possible zone as our initial estimation region of the target’s location. Since making difference of RSSIs effectively tackles the noise’s influence, it is highly possible that the target is located in the possible zone. Then, we optimize the intersection algorithm for making the possible zone by scheduling a reasonable order of intersection. As a result, the computational work is extremely reduced. Since the possible zone determined by the sign of RSSD is certain enough for localization, we are capable of using the absolute value of RSSD to further narrow the target range into the refined zone. Finally, we determine the target’s final location by choosing the reference dot with the minimum defined norm in the refined zone.
The outline of this article is as follows: In section “Related work,” current works about the localization techniques in WSNs are introduced. In section “System overview,” the localization system is introduced. Our proposed localization scheme is also defined. In section “RSSD-based tracking estimation method,” the RSSD-based tracking algorithm is discussed. The tracking method is divided into three stages: the possible zone, the refined zone, and the final location. Simulation results are presented in section “Simulation results.” Finally, conclusion is provided in section “Conclusion.”
Related work
Generally, the localization approaches are broadly categorized into range-based and range-free schemes. Range-based localization algorithms estimate the physical distance or the relative angle between nodes using localization measurements such as RSSI, 17 time of arrival (ToA), 18 time difference of arrival (TDoA), 19 and angle of arrival (AoA).20,21 The most common method of range-based technique is RSSI algorithm, since most radio frequency (RF) wireless devices have a built-in RSSI, which is capable of measuring the RSSI without any additional cost. 22 But the ranging error of RSSI is always great, due to the disturbance of noise, interference, multi-path fading, and so on. Besides, there is no common channel propagation model that can map RSSI into physical distance in varying environmental conditions. Some other range-based localization methods, such as ToA, 23 TDoA, 16 and AoA usually need additional special hardware or computing resources to obtain accurate distance or angle measurements. 24 Range-based methods generally depend on extra hardware and are extremely vulnerable to measurement noise. Therefore, they have innate disadvantages in terms of cost and accuracy.
Range-free schemes depend on proximity sensing or connectivity information to estimate the target’s location, 25 which are considered as cost-effective but less accurate than range-based scheme. Some popular range-free methods include convex position estimation (CPE), 26 distance vector-hop (DV-hop), 27 centroid, 28 approximate point in triangle test (APIT), 29 and ad hoc positioning system (APS). 30 A typical range-free localization algorithm called APIT for large-scale sensor networks is presented in He et al., 29 and the experiment shows the APIT scheme performs best when considering an irregular radio pattern and a random node placement. Gui et al. 27 presented two improved algorithms based on the original DV-hop algorithm, checkout DV-hop, and selective three-anchor DV-hop. Checkout DV-hop is more accurate than original DV-hop because it adjusts the estimated location of a normal node on its distance to its nearest anchor. Selective three-anchor DV-hop is the best choice because more candidate positions of each normal node are made, and the best candidate is chosen by its hop counts different from the normal node. Woo et al.31,32 presented a novel range-free localization algorithm to obtain the optimal scaling factor for one hop with respect to distance errors of all anchors in the networks. It is a reliable anchor node selection algorithm in anisotropic networks. Ma et al. 33 improved the popular range-free algorithm called multidimensional scaling (MDS) by exploiting the hop-count information. Instead of adopting the integer-valued hop count in the original MDS method, they quantize a node hop-count value based on the distribution of the neighbor nodes, and a real-valued hop count is used in the MDS computation.
Based on the advantages and disadvantages of the two types of localization algorithms, many researchers have proposed precise RSSI-based localization methods in recent years. Jiang et al. 34 proposed a localization scheme, called AoA localization with RSSI difference (ALRD), to estimate AoA in 0.1 s by comparing RSSI values of beacon signals received from two perpendicularly oriented directional antennas installed at the same place. However, the scheme still needs to install additional measurement equipments resulting in high cost of complex hardware design. Wang et al. 35 introduced an RSSI-based indoor localization method using a transmission power adjustment strategy to attain RSSI after reducing the indoor environment effects. Multiple RSSI patterns in the real indoor environment are also developed to boost the accuracy of the distance estimates between two nodes. The results show that the method can provide a low-cost solution with fair precision for indoor localization. In Sahu et al., 36 another RSSI-based localization scheme is presented, which considers the trend of RSSIs obtained from beacons to estimate locations of sensor nodes. The maximum RSSI point on the anchor trajectory is located first. Then, the sensor position can be determined by calculating the intersection point of two such trajectories. The advantage of their scheme is that it avoids employing RSSI directly, and thus, their scheme achieves higher location accuracy in real environment.
In general, for range-free localization algorithms, their cost-effective characteristic has made them available in large-scale and resource-constrained sensor network applications. 33 However, these range-free algorithms have some limitations, such as requiring large number of anchors for higher localization accuracy. 28 For range-based localization algorithms, especially for the localization method based on RSSI, which is always affected by noise, the poor accuracy is not tolerated in real environment. Furthermore, the signal strength can be affected by path loss, fading, and shadowing as well. 22 Therefore, RSSI is not the optimal choice to estimate distance in WSN localization issues.
Some work concerning RSSD-based localization is made. The article by Zou et al. 37 presents a localization method based on RSSD to determine a target on a map with unknown transmission information. However, that article regards tracking as an Markov process which could hardly eliminate the negative impact from accumulative error. The article by Gerok et al. 38 combines TDOA and RSSD to estimate the target trajectory, and the localization accumulative error also easily occurs without absolute measurement. This article will address the above problems inherited in the existing research work.
System overview
The target and WSNs
We propose a tracking method for an arbitrarily moving target in WSNs, which means that there is no special restrictions for the motion state of the target and the deployment of the sensor nodes. In order to facilitate the research, we assume that there are a certain number of sensor nodes deployed randomly and uniformly to be the WSNs. One target is moving through the WSNs at the velocity whose magnitude and direction could change randomly at each time step. And the target is equipped with a radio transmission device for transmitting signals which the sensor nodes are capable of receiving. As illustrated in Figure 1, the localization sensor networks are composed of

The localization sensor networks.
Definition 1 (marginal circle)
The marginal circle

The marginal circle
Definition 2 (marginal zone)
The marginal zone is the region inside or outside one node’s marginal circle, denoted by
The measurement
RSSI
RSSI is a common method to estimate the distance, based on the signal strength received by the sensor node.
14
Theoretically, the received power

where
However, the relationship between RSSI and the distance defined by equation (1) is an ideal case. The signal often decays at an uncertain rate.40,41 Besides, different transmitting antennas have various gains and wavelengths. 42 A simplified form of the relationship is defined

where
However, for each sensor node

where
RSSD
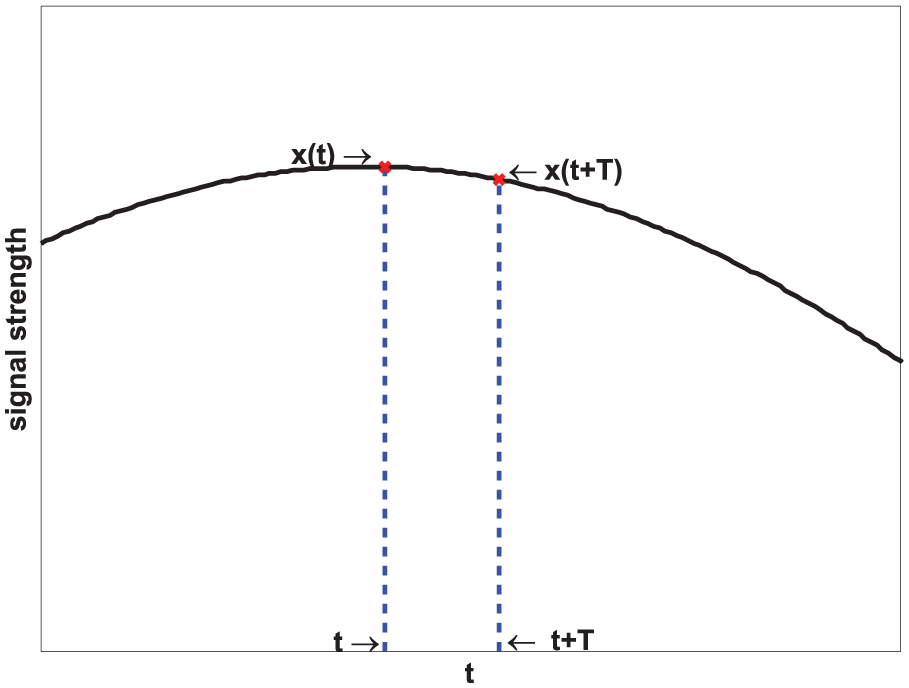
RSSI estimator has poor accuracy for the localization issue. Instead of RSSI, we use the difference value of signal strengths, the RSSD. The sink node, which is used to process data collected from WSNs, always stores two signal strength values of each node, received at last time step

The absolute value of RSSD for one node

The sign of RSSD can be positive, negative, or zero (if the signal strength does not change). The zero case is not under consideration, since the node with zero RSSD value has no contribution to our localization scheme.
The positive sign of RSSD on one node infers that the target has been moving inside the marginal circle of the node from last time step

where
One possible range of the target can be inferred from the sign part of RSSD observed by one sensor node related to the region of its marginal zone. If we have more than one available sensor nodes at different positions around the target, the target’s location can be further inferred from the intersection region of these sensor nodes’marginal zones, called the possible zone. The possible zone is further shrunk using the absolute value of RSSD, called the refined zone. The computation processes of the possible zone and the refined zone are introduced in section “RSSD-based tracking estimation method.”
RSSD-based noise canceller
Figure 3 shows the principle of the RSSD-based noise canceller. A signal

The noise canceller cancels noise by making difference of correlated noises in the primary input and the reference input.
If the noise was highly correlated between the primary and reference inputs, it would be greatly cancelled from the output. In the noise canceller, our objective is to produce the output
Asssume that signals

By squaring, we obtain

Taking expectations of both sides of equation (8) and realizing that

The signal power

When

From equation (7), the output
It is seen from equation (8) that the smallest possible output power is
Assume a signal is stationary,

Therefore, the power spectral density

where
A signal
Thus, in our case, the power spectral density of the input noise sampled with time interval

where

Our method works for all the correlated noises which is slowly time varying in general. One case is shown in Figures 7 and 8. There is no restriction for the correlation model of the noise, since our analysis is based on the basic definition of the correlation in equation (15).
The output noise at time step

Therefore, the relationship between the power spectral density of the output noise and one of the input noises is

which is proved in Appendix 1. Hence, the magnitude square of the frequency response of the linear time-invariant (LTI) system in Figure 3 is

which is also shown in Figure 5. Because of the inherent periodicity of the discrete time–frequency response, frequencies around

The magnitude square of the frequency response of the noise canceller system in Figure 3 (
Denoising effectiveness
Assume the noise

where
The signal strength curves of one sensor node labeled as

The sensor nodes and the target trajectory. The sensor node labeled

The theoretical received signal strength (
The RSSD values sampled from the sensor node

The ideal RSSD values and the practical ones with noises of the sensor node
From equations (3) and (19), the received signal strength

Similarly, for the last time step

By making difference the above two equations, we obtain

For both

where

because the mean value of both
If the noises are highly correlated between the two neighboring sampling time steps and if we choose a pretty small sampling time interval

The mean square error (MSE) of the estimation of
Threshold denoising
Above noise model is an ideal case that is highly correlated between neighboring sampling time steps. The denoising effectiveness of the noise canceller would not work well for the noise with low correlation. To further reduce the noise effect, a threshold denoising method is introduced, as shown in Figure 3 and equation (6). Figure 3 shows that the output of the noise canceller
Sign report accuracy is the rate of the sensor nodes whose RSSD sign is the same as the sign of

2. Availability is the rate of the sensor nodes whose RSSD absolute values are greater than the threshold

Figure 9(a) indicates that a larger threshold

A higher sign report accuracy is at the cost of less availability of the sensor nodes. A reasonable threshold
Figure 9(b) shows that the availability of the sensor nodes is always starting from 100% when choosing a
Although larger threshold
The curves in Figure 9(a) and (b) are gained by averaging the statistics from the whole trajectory. Besides, the locations of sensor nodes are generated randomly and uniformly, and the target trajectory is also generated randomly. Thus, the curves can be referenced to select a threshold. From the following, we will determine the threshold
A kth degree polynomial is used to estimate the curve based on the

By substituting

The above equation can be abbreviated as

Left multiplying both sides by the transpose of


Or

Thus, the polynomial matrix can be achieved by

Based on the statistic points from Figure 9, the estimate function of sign report accuracy and availability in terms of the threshold

where
RSSD-based tracking estimation method
In this section, a practical method is provided to track an arbitrary moving target in WSNs based on the RSSD. Different from RSSI, RSSD is not to give the location of target by means of calculating the absolute distances between target and nodes but to determine the location by estimating the most possible location with the change in RSSI. The estimation process is divided into three stages, the possible zone, the refined zone, and the final location. Along with the process, the possible range of the target is gradually narrowed down to a certain point. The following subsections will give the details of the method.
The possible zone
The definition
A possible zone is regarded as the estimated geometric range which limits the real position of the target at a certain time and is able to provide an accurate location range of the target just by using the sign of RSSD. The possible zone can be further defined as the intersection area of all the available sensor nodes’marginal zones. All available nodes’ RSSD values will be processed by the processing node to estimate the possible zone. The possible zone of the target at time step

where
Because the intersection of marginal zones is generally not a regular shape, the range of the possible zone is greatly difficult for us to determine by plane geometry, particularly as there are a large number of marginal zones of the sensor nodes. To simplify the problem, we adopt a set of points deployed uniformly with a certain density in the range of the zone to characterize the size of the area. The possible zone at time step

The possible zone in a set of black reference dots. The example is at time step
Optimizing processing
Although the set of points can effectively reduce the computational load, in practical calculation, massive and frequent processing still tackles the efficiency of determining the possible zone’s range. Before obtaining the final possible zone, the range could be gradually shrunk as more marginal zones intersect together in a random order. Although the determination of the possible zone practically runs in PC, which is linked to the sink node, the computational efficiency is also needed to be considered. For ensuring the real-time tracking to the greatest extent, we should simplify the original calculation process in terms of how to choose a more effective order to intersect the marginal zones down to the possible zone.
Scheduling a reasonable intersection order of the marginal zones is effective to promote the convergence rate of the possible zone. Intuitively, starting the intersection with a small marginal zone, the possible zone could be narrowed down immediately. However, if the intersection starts with one greatly large zone, it is possible that the range shrinks very slowly at first and then suddenly narrows down as meeting a small marginal zone. An order-selection mechanism is proposed: intersect the zones by ascending order of zone radius, choosing the smallest marginal zones first. Here, we only adopt the nodes with 1 zones, which we will explain in detail. As shown in Figure 11, the zone bounded in purple line is the possible zone, and the zones inside the red marginal circles are starting zones which participates in the intersection process first. As we can see, choosing the smallest zone first could be tremendously beneficial for intersection range converging than choosing a larger zone randomly.

The starting zones for the intersection when the target is at time step
The comparison of the convergence ratio between the optimized algorithm by order of the zone radius and the original algorithm by choosing the nodes randomly, at time step
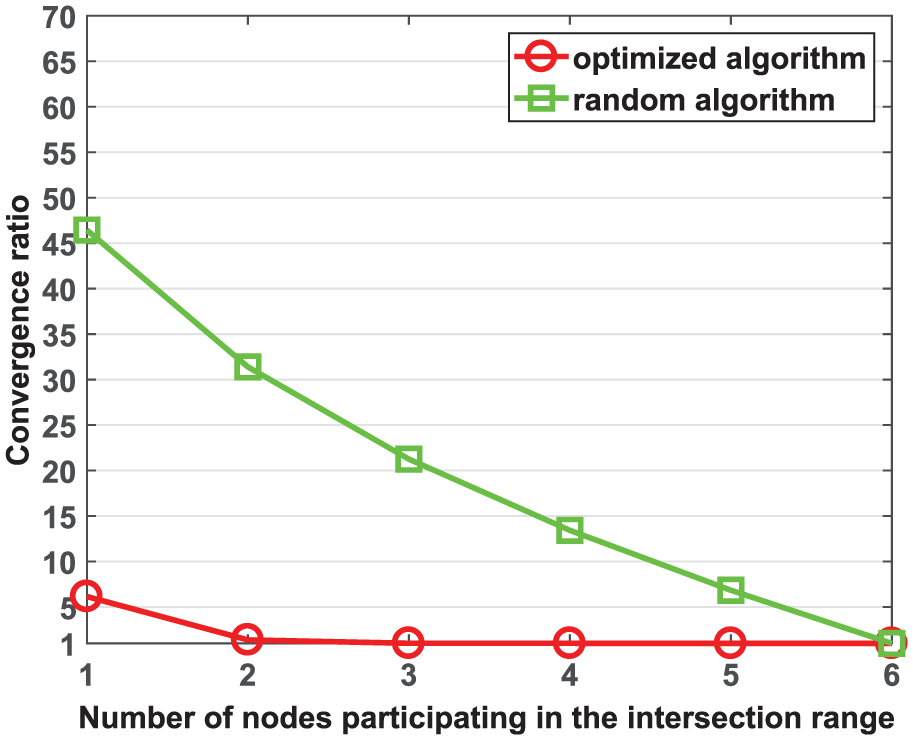
The comparison of the convergence ratio between the optimized algorithm and the original algorithm. The example is at time step
Intuitively, the 0 zone has greater area than the 1 zone with the same zone radius, though this inference is not rigorous enough. It provides a potential scheme to simplify the calculation procedure, to intersect only 1 zones instead of all marginal zones, and equation (34) can be simplified as below

where only the nodes with 1 zones participate in the intersection computing and
To prove the above inference feasible, we compare two convergence ratios, which are calculated by the intersection ranges contributed by 0 zones and 1 zones, respectively, divided by the area of possible zone. The convergence ratios at different time steps are shown in Figure 13, which indicates that the area contributed by 1 zones is extremely smaller than the area contributed by 0 zones at almost all time steps. Thus, the 1 zone definitely converges more efficiently than the 0 zone. The nodes with 0 zones or negative RSSD values will be dropped from the intersection list.

The convergence ratios of 1 zones’ and 0 zones’ intersection range. The convergence ratio is greater or equal to
Terminal condition
The intersection range converges finally when its area is equal or approximately equal to the final possible zone (this final possible zone has eliminated the 0 zones’ contribution, and we can tolerate the intersection range a little bit greater than the exact final possible zone, for instance, 5% greater, since it is reasonable to use less sensor nodes participating in the intersection process than actual total available sensor nodes). After the calculation for some time, the more the sensor nodes are picked, the slower the convergence rate of the intersection range occurs, as shown on the red curve in Figure 12. Although the computational processing of the possible zone has been optimized by the ascending order of 1 zones’ radii, there still exist some 1 zones with large radii that make little or even no contribution to the possible zone in the last period of intersection. Since we have almost used up small zones, the large zones left are not significant to the convergence of the final zone. These large zones also need to be dropped to reduce computational redundancy. To achieve this goal, one area change ratio
where
Overall, we analyze the algorithm complexity of the optimizing processing for getting the possible zone. We conclude that the computational complexity of the optimized algorithm is always less than the original one. For the original algorithm without the order-selection mechanism, since it gains the possible zone by intersecting all available sensor nodes’marginal zones without reservation, which takes
The refined zone
The possible zone is determined by the sign of RSSD, and it has been proved that the target is certainly located within the possible zone. While the area of possible zone might be still large if there were not enough sensor nodes near the target. The case is difficult for us to choose the location point in the zone. In this section, we will further shrink the zone using the absolute value of RSSD if the possible zone is not small enough.
In Figure 14,

The distance
The distance

where
The estimated distance

where
The refined zone is the intersection region of circles formed by each node position

The possible zone is further shrunk to the refined zone (the yellow shadow region). A total of two cases are considered: (a) two more nodes and (b) fewer nodes.
The final location
The possible zone has been shrunk to the refined zone, which is small enough for further positioning. The set of reference dots distributed with a certain density in the refined zone will be utilized to calculate the final location, by the aid of a norm function. Positioning with the reference dots will also compensate the localization inaccuracy of the previous zones.
The final location of the target is substituted by the location of the reference dot in the refined zone with the minimum norm

where
Simulation results
In this section, the performance of the proposed RSSD-based localization algorithm is compared with the RSSI-based method. The purpose of this analysis is to show how the two algorithms’ localization error is affected by noise. For the RSSD-based method, we also present how the localization accuracy is affected by setting different threshold
In simulation experiment, one sensing field of area
The impact of noise
The average localization errors of the RSSI-based method and the RSSD-based method are shown in Figure 16. The localization error is calculated under different standard deviation

The localization error of the RSSI-based method and the RSSD-based method. A trilateration algorithm is adopted based on the RSSI method of distance estimate.
The impact of threshold
The performance of the RSSD-based method in terms of different threshold
The performance of the RSSD-based method in terms of the threshold value
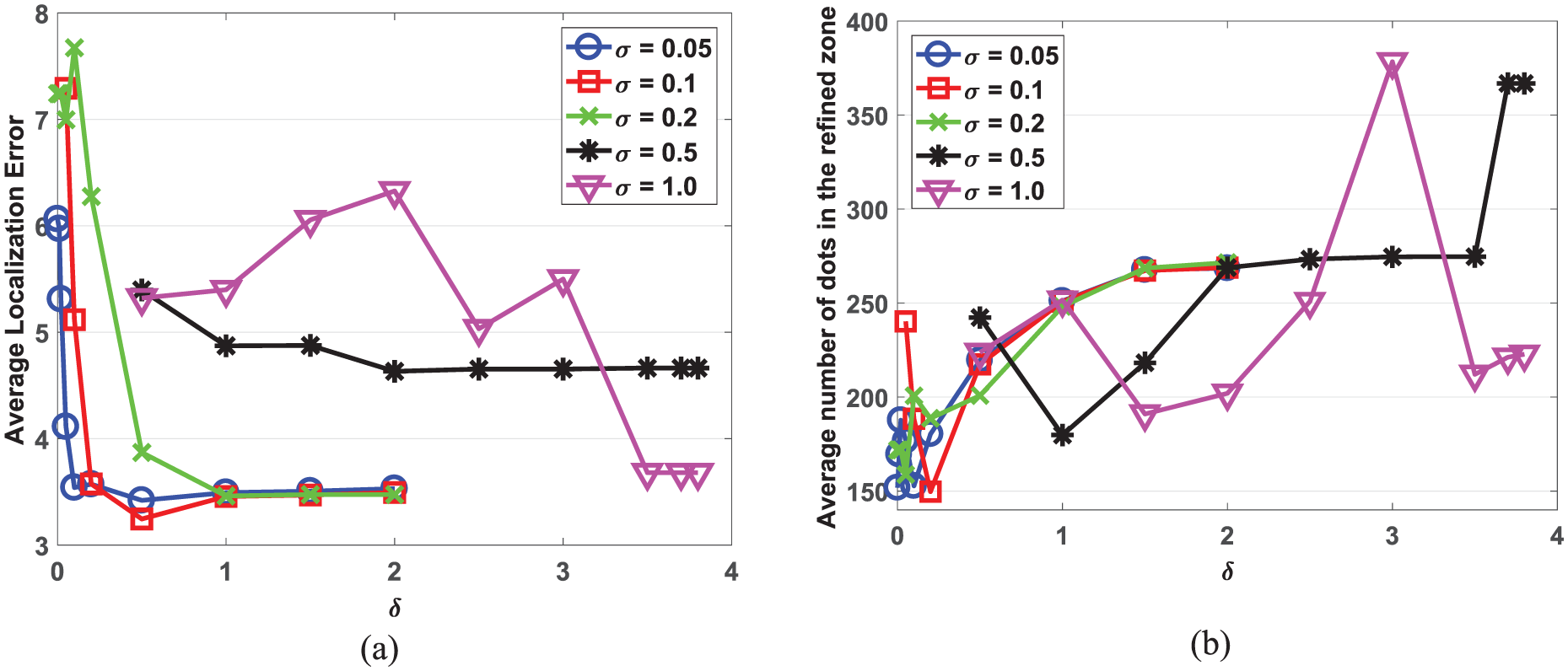
The impact of reference dot density
Both localization accuracy and calculation workload take into account another parameter, the reference dot density (the distance between the two neighboring reference dots). From Figure 18, the average localization error grows slightly as the reference dot density becomes sparse in the zone. A high reference dot density boosts the accuracy slightly, whereas it greatly enlarges the computational amount greatly as well. There could be nearly

(a) The average localization error is related to the reference dot density and (b) the number of reference dots in the refined zone in terms of the reference dot density.
The comparison of area
The comparison of the area of the possible zone and the refined zone is shown in Figure 19. The possible zone is the intersection part of 1 zones of active sensor nodes. While at some time steps, there may be few sensor nodes near the target. Thus, the area of the possible zone may be relatively large under this poor condition. The refined zone is extremely narrowed down from the possible zone, as shown in Figure 19(a), which definitely enhances the calculation efficiency. One case of the possible zone and the refined zone of the target at time step

The area of the possible zone and the refined zone at each time step. The reference dot density is
The comparison of computational expense
Finally, the comparison of the computational time (s) between the original and the optimized algorithms for making the possible zone is shown in Figure 20. The result presents that the computational time is immensely compressed by our optimization: The nodes with negative RSSD values owning 0 zones are removed from the intersection list, and the intersection process is ordered by the zone radius so that the intersection range can be narrowed down as soon as possible. Due to the optimization, the intersection range of the target is converged in advance. Therefore, the optimized algorithm extremely reduces the calculation time for the possible zone.

The comparison of computational time between the original and the optimized possible zone algorithm. The test is executed by MATLAB R2014a on Mac.
Conclusion
In this article, we propose a new target tracking method based on the RSSD, which is available for all kinds of moving targets. By making difference value of the received signal strengths sampled from two neighboring time steps, the influence of noise on the estimation can be reduced. Based on the sign of RSSD, one possible zone of the target is estimated. Then, we optimized the intersection algorithm to reduce the computational time. We further shrink the possible zone to the refined zone, which is small enough for us to find the target’s location in the zone.
Simulation results show that the noise affects our localization technique slightly. The RSSD-based algorithm is more robust to the noise. The performance of our scheme under various parameters is also provided to evaluate. We analyze the dual characters of the threshold value
Footnotes
Appendix 1
The output noise of the noise canceller is the difference value of the input noises sampled from the two neighboring time steps with time interval
The autocorrelation of the output noise with time interval
Substitute equation (40) into equation (13), the power spectral density of the output noise is
Substitute equation (39) into equation (41), we obtain
There exist four terms of the product of noises sampled at their corresponding time steps when we expand equation (42)
Rearranging the exponential terms, we obtain
Comparing the coefficients with equation (14), it becomes
Acknowledgements
We thank Randy Freeman, Chung-Chien Lee, and Goce Trajcevski (EECS Department, Northwestern University, Evanston, IL) for their valuable suggestions in relation to this work.
Handling Editor: Luca Reggiani
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (61471110 and U1713216), National Key Research and Development Program of China (2016 YFB0701100 and 2017YFB1300900), Chinese Universities Scientific Foundation (N160208001 and N162 60004), Dr research fund of Liaoning Province (201705 20211) and Shenyang Research Fund (17-87-0-00).