
Abstract
The purpose of this study was to map the actuating performance of knitted SMA modules, and propose design guidelines for developing optimal SMA actuators, to be used in wearable assistive devices, suitable to be worn on the human body. To validate the findings of this study in the real world, we adopted an assistive rehabilitation glove for hemiplegic patients as a particular design case. To characterize the bending and contractile properties of knitted SMA modules, we conducted actuating performance tests with 720 knitted SMA samples under various conditions in actuation force, bending angle, contraction, electric power, and surface temperature. Based on the results, we proposed design guidelines by aligning the actuating performance of knitted SMA modules with joint mobility of hemiplegic patients for a smart rehabilitation glove. We anticipate that the outcomes of this study will serve as a practical yardstick for researchers in determining the desired actuating performance of a knitted SMA module that can support and assist the joint motion of the human body, when designing a wearable assistive device.
Keywords
Introduction
Shape memory alloys (SMAs) are intelligent materials that can regain a memorized form in response to external stimuli, such as temperature. 1 When heated to a temperature higher than that corresponding to the austenite state, they return to their original form through the martensitic state. 2 That is, the SMA is restored to its original form when heated to a temperature equal to or higher than a particular value by Joule's heating and electrical resistance heating is used to operate the SMA wire. 3 SMAs can be formed into wires of multiple thicknesses and widths ranging from a few millimeters to tens of micrometers. 4 Nitinol, an alloy of Nickel and Titanium (Ni-Ti), is most widely used, and various combinations of Ni-Ti alloys can realize the desired mechanical properties, 5 such as load lifting. Then, various design methods to maximize the performance of SMAs have been proposed. 6 Furthermore, some researchers have attempted to maximize the performance of SMAs by designing new forms, such as spirals, to overcome the limitations of the one-dimensional contraction transformation of SMA wires; and they analyzed the mechanical properties of spiral-shaped SMAs with various wire diameters, 7 suggesting the actuator’s applications in aerospace. 8 Additionally, an SMA cable with multiple layers was designed to provide a high operating speed with less energy and increased strength. 9 However, these efforts to strengthen the actuation performance of the SMA, in turn, result in reduced flexibility, which makes it less suitable for wearables that need to correspond to complex human anatomy and motions.
Recognizing the need, recent studies have tried to simultaneously provide high actuation performance and flexibility to SMAs. According to Yin et al., 10 up to 44% deformation tolerance and higher actuation force can be provided through an actuator by incorporating nylon into SMA materials; this structure was used as an artificial muscle. 10 An assistive wearable was also proposed in which SMA spirals were inserted into the fabric to increase muscle strength. 11 Furthermore, studies to develop complete fabric-type actuators by introducing a knitting technique to the SMA wire are underway. Several researchers have analyzed the change in actuation contraction according to the diameter, applied load, space difference between the knit loops, and changes in actuation cycles according to differences in the number of wales and courses.6,12 Further, the time element has been added to SMA wires as the fourth factor to the 3D deformation,13,14 which allows practical wearable applications of knitted actuators to be worn on the human body real-time.15,16 Additionally, the actuation force of the knitted SMA was simulated through finite element analysis, proposing a high predictive power for the force compared with that of manufactured SMA knitted modules. 17 As such, the knitted SMA can be applied to wearable products because it has a contraction force of at least 40%, high energy density, and improved mechanical performance compared to the original (non-knitted) SMA wire, while exhibiting the unique flexible characteristics of the knitted fabric.6,18
While the above-mentioned studies have mostly contributed to the functional improvement of knitted SMA actuators themselves, some have tried to understand human-device interactions with a consideration of the actuators’ mechanical behaviors as well as the wearer’s anthropometric information. 19 For example, Granberry et al. 18 developed self-fitting wearables by applying the circumference of the thigh, knee, calf, and ankle of the body to the contraction of a knitted SMA. In another study, Granberry et al. 20 developed a shoe based on the actuation characteristics of knitted SMA according to yarn-spinning methods, loop length, and SMA materials at different operating temperatures. Additionally, Lee et al. 15 demonstrated that the bending angles of knitted SMA modules can mimic the bending angle of a hand by comparing the angles of the hands of older adults to those of knitted modules. Furthermore, Eschen et al. 6 proposed use guidelines to be applicable on the human body, considering various transformation motions of knitted SMA.
As such, the human body takes dynamic motions; however, most of the previous studies have analyzed actuating performance in one-dimensional deformation directions – for example, contraction. Thus, the results of the previous studies have limitations in that it is difficult to apply them to various movements of the human body. Furthermore, although actuating characteristics may vary depending on the loop ratio of the course and the wale that make up the knit, these factors have not been considered much yet. Additionally, researchers have put efforts to provide high driving performance and flexibility simultaneously with various materials. Some of them proposed pneumatic actuators made of ultra-light silicon or lightweight actuators composed solely of polymer materials.21,22 Nevertheless, these material solutions, without considering sophisticated actuating performance, likely fail to replicate the curvature and joints of the human body accurately.
Therefore, this study aimed to map the actuating performance of knitted SMA modules, and propose design guidelines for developing optimal SMA actuators, to be used in wearable assistive devices, suitable to be worn on the human body. To validate the outcomes of this study in the real world, we adopted an assistive rehabilitation glove for hemiplegic patients as a particular design case. First, to characterize the bending and contractile properties of knitted SMA modules, we conducted actuating performance tests under various conditions of the modules. That is, we fabricated 720 samples of knitted SMA modules, representing different knit module, knit structure, wire diameter and knit gauge, and we measured the hemiplegic patients’ anthropometric data, range of motion and the change ratio in the skin surface length of their finger joints. We then tested the actuating performance of each knitted SMA module in actuating force, bending angle, shrinkage, electric power and temperature. Based on the results, we proposed design guidelines by aligning the actuating performance of knitted SMA modules with joint mobility of hemiplegic patients for a smart rehabilitation glove. We anticipate that the outcomes of this study will serve as a practical yardstick for researchers in determining the desired actuating performance of a knitted SMA module that can support and assist the joint motion of the human body, when designing a wearable assistive device.
Method
This study was guided by the following four stages, as shown in Figure 1, and the method executed in each stage is detailed in the subsequent section. Schematic of the study.
Fabrication of experimental knitted SMA modules
First, to investigate the actuation characteristics of knitted SMA modules, we utilized Nitinol SMA wires with diameters of 100 μm, 150 μm, 200 μm, and 250 μm. The relevant properties and phase transition temperature of the SMA wires were provided by the manufacturers (see Figure 2). Additionally, we confirmed that the SMA wires exhibited a permanent set below 0.5% strain even after undergoing hundreds of thousands of cycles at stresses below 15,000 lbf/in2. To minimize directional residual torque during the spinning process, we wrapped the SMA wire with 100% polyester yarn, employing both S-twist and Z-twist directions. Furthermore, we conducted repeated driving experiments on the knitted SMA actuators to ensure consistent performance. During our experimentation, we adjusted the fiber density and applied S-twist and Z-twist winding forces to offset torque as effectively as possible. This approach prevented short circuits, increased friction between knitted loops to maximize deformation, and minimized the Joule heat generated when applied to the human body when actuating an SMA wire. The design parameters influencing the actuation performance of knitted SMA modules can be summarized into the following four characteristics
15
: (1) the type of knit modules (basic, ratio, and hybrid modules), (2) knit structures (plain and rib knits), (3) wire diameters (100 and 200 μm; 150 and 250 μm), and (4) knit gauges (adjusted needle size = 2, 3, and 4 mm). The SMA wire used corresponded to the thickness of the lace or super-fine yarn in general thread thickness and the needle size used was determined according to the standards defined by the Craft Yarn Council.
23
Material characteristics and phase change of a used SMA wire.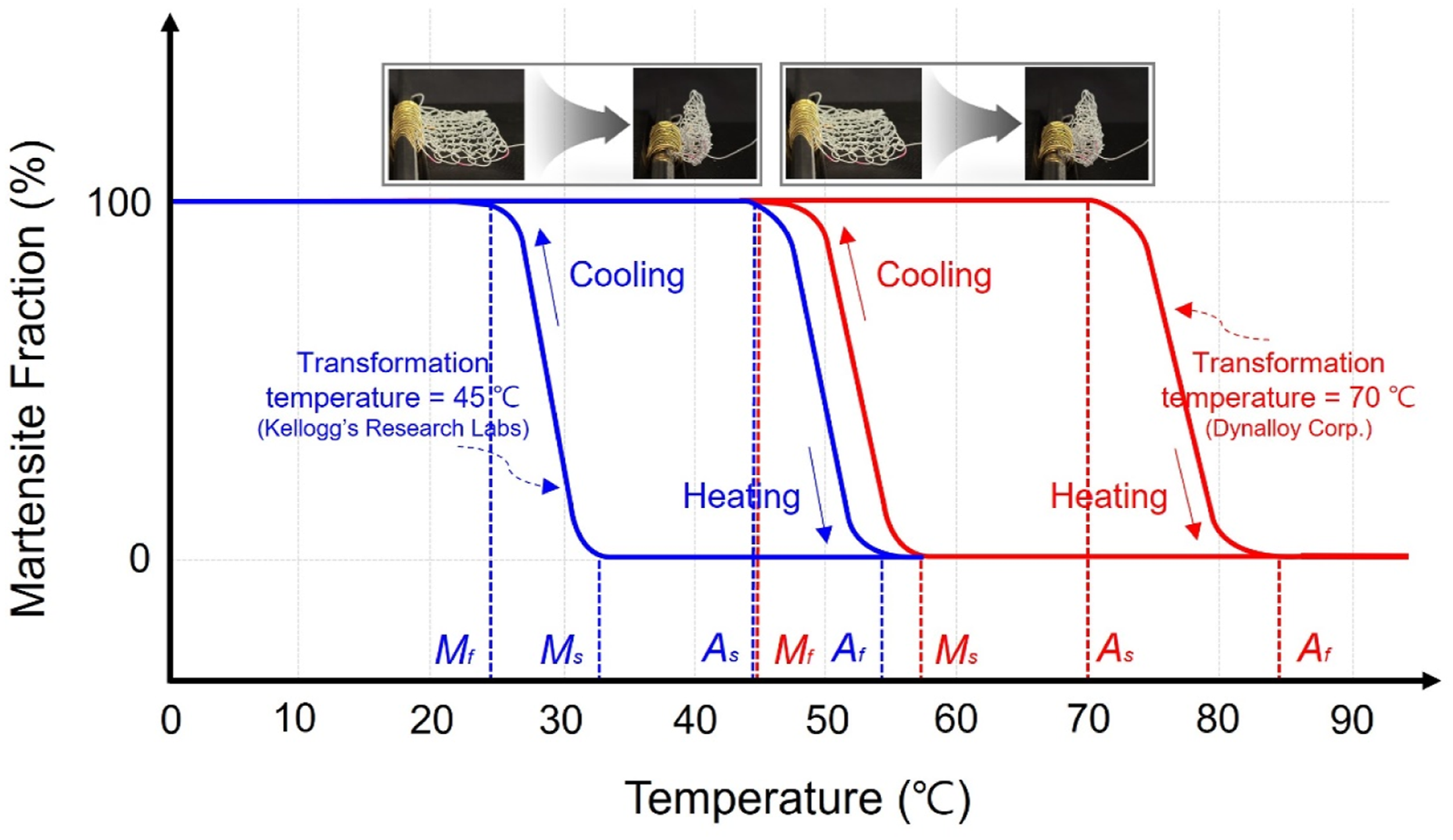
The basic knit module (B-module) was manufactured with the same loop ratio of wales to courses (10 × 10 loops). The ratio knit module (R-module) was used to analyze the differences in actuation characteristics according to the wale and course ratios. Modules of the knit loop with a ratio of 1 × 4 or higher were excluded because the transformation was bistable and non-constant in both directions. Thus, the wale and course ratios were analyzed by setting them to 1 × 1, 1 × 2, 1 × 3, 2 × 1, and 3 × 1 (Figure 3(a)). A hybrid knit module (H-module) was developed by overlapping plain and rib knits to derive the bending and contraction elements. We conducted the analysis on modules obtained by overlapping the rib knit's B-modules with the plain knit modules and vice versa, as shown in Figure 3(b). To ensure a proper match in size, we used a ratio of 1 x 2 for the overlapping modules relative to the B-module. By adopting this design approach for the H-modules, we were able to achieve two actuation directions for the modules, as the actuation direction is determined by the bending direction of the plain knit. Therefore, the B-module was designed with two knit structures, four diameters, and three gauges for 24 knit modules (2 × 4 × 3 = 24). The R-module added five knit loop ratios and 168 pieces were designed (2 × 4 × 3 × 5 = 120). The H-module was designed with 96 knit modules (2 × 4 × 3 × 4 = 96) by adding four attached knit module diameters. Thus, 720 knit modules were designed with three modules each (Table 1). Knit modules manufactured: (a) B-module, (b) R-module and (c) H-module. Design parameters and derivation factors for the knitted SMA modules.

Actuation characteristics of knitted SMA module
A verification test was performed on the knitted SMA modules designed in the section right above. All experiments were performed in the same laboratory environment (room temperature: approximately 24°C). For each module condition, we performed three repeated measurements on three identical SMA samples. The knitted SMA modules were actuated using electrical energy from a power supply (UNI-T UTP3315TFL, China). We measured the voltage and current required for each module and applied the corresponding amounts throughout the driving process consistently from start to finish. For each module, the electric power was analyzed in terms of the operation time. The derived Watt-hours value denotes the energy consumed to operate the knitted modules (equation (1)). We measured the electric power per second three times, and the time taken to complete the actuation. A load cell (F/T Sensor-Nano 17, USA), that is, a multi-axis force sensor capable of measuring vector quantities (Figure 4(a)), was attached to the center of each module to measure the actuation force. The change in force was measured thrice per second after the knit module actuation was initiated for 1 min. Measurement methods for the knitted SMA module: (a) actuation force (b) bending angle (c) actuation contraction and (d) surface temperature.

Han and Ahn analyzed the bending angle of the modules because the SMA plain knit module had bending characteristics in the wale direction of the knit during actuation.
13
The bending angle of each knit module was determined by recording the transformation motion during actuation, extracting pictures in units of 1 s for each time slot, and measuring the angle from the side using a virtual protractor (Iconico Inc., Philadelphia) (Figure 4(b)).
15
Each knitted SMA module was divided into three parts according to the wale pillar and set to the bottom, middle, and top, following the landmarks marked on the extracted picture. Subsequently, the top angle (α) and middle angle (β) of the module were measured thrice. Furthermore, the actuation contraction of the SMA rib knit module was analyzed because the rib knit module had contractile characteristics in the course direction of the knit during actuation.
13
The length change was measured thrice from the course direction of the designed rib-knit module. The length difference in the course direction before and after actuating the rib knit SMA module was calculated as a percentage to derive the actuation contraction (%) (equation (2)).
We also analyzed the surface temperature when the designed knitted SMA module was operated because Joule heat is crucial when developing wearable products using SMA materials. The surface temperature was measured using an iButton wireless temperature measurement device (Dallas Instruments, USA). The measurement range of this device is from -20°C to 85°C (±0.5°C), and the resolution is 8-bit. It was placed at the center of each knitted SMA module and the change in their surface temperature was measured for 1 min (Figure 4(d)).
Data analysis
We analyzed the actuation characteristics of the knitted SMA module using SPSS 26.0 (IBM SPSS Statistics 26, USA). The Shapiro-Wilk test was performed to test the normality of each data and the average and standard deviation of each data point was derived through descriptive statistical analysis. The mean differences according to the SMA wire diameters in each knit gauge and loop ratios were analyzed using the Mann-Whitney U test and Kruskal-Wallis H test, respectively. Specific differences between each factor were analyzed using a post–hoc test. The significance level was all set at p < 0.050.
Validation of design guidelines
This study adopted a specific design case of the human hand, as it comprises numerous joints and complex structures in a relatively small area of the human body. Thus, we set the target wearable device for this study as an assistive rehabilitation glove that requires the extension motion of the knitted SMA modules on the wearer’s hand. The force required for the patients to move a finger was adopted from the results of a previous study 24 that mapped the required force according to the modified Ashworth Scale (MAS) and stiffness grade, in that a force of at least 0.75 N is required for patients with a MAS grade of 1+. Moreover, the required specifications for the bending angle of the knitted SMA were set by comparing it with the range of motion (ROM) of the finger joint. Accordingly, a bending angle of over 70° was applied because the ROM of the finger joint corresponded to approximately 70°– 110°, which method was referred from. 25
Requirement specifications for assistive rehabilitation gloves.

PIP: proximal interphalangeal; MCP: metacarpophalangeal.
To select knitted SMA modules that satisfied the above technical requirements for rehabilitation gloves, we set up a scenario in which it could be applied to the hands of hemiplegic patients (Figure 5). Because hemiplegic patients have issues with stiffness and medial flexion of the hand,
28
we tried to design a rehabilitation assist glove that could help extension movement of fingers. First, knitted SMA modules that derive more than the minimum requirement specification for actuation force and bending angle were selected. Then, knit modules corresponding to the change ratio in skin surface length of each user were selected from the three joints, DIP, PIP, and MCP, and applied to each joint. In terms of users’ safety and energy efficiency, modules that satisfied the surface temperature and electric power conditions of the mapped knitted modules were selected. Finally, we designed the selected knitted SMA modules help the extension motion of the hand with hemiplegia by pulling the finger joints through the contraction actuation and applying the flexion actuation in the opposite direction of the bent finger (i.e., extension direction). The knitted SMA module was applied to each joint through this scenario was set up to help the hand's extension motion with hemiplegia, and it was possible to present design guidelines for rehabilitation assistive gloves. Application scenario for knitted SMA modules.
Results
Optimal knit gauge according to wire diameter
The SMA plain knit modules with a 2 mm gauge exhibited the highest actuation force for all diameters at 30 s and 60 s after actuation commencement, with a relatively small space between loops (Figure 6). For the knit module with a diameter of 100 μm, the actuation force gradually increased for all gauges, with a relatively small difference between gauges. Conversely, for a 200 μm diameter with a 2 mm gauge, the actuation force increased rapidly until approximately 20 s after the actuation began and then plateaued. The actuation force increased faster for the 3 mm gauge until the 30 s mark and for the 4 mm gauge beyond that. For the modules with a diameter of 150 μm, the actuation force increased rapidly for approximately 5 s after the actuation began, and subsequently became constant. However, for the 250 μm millimeter diameter modules, the actuation force of the 3 mm and 4 mm gauges increased faster than that of the 2 mm gauge until approximately 10 s after the actuation began. After the 10 s mark, the actuation force of the two mm gauge increased faster. This difference between the actuation force of the three- and four-mm gauges and that of the two-mm gauge was remarkable. Differences in actuation force of the SMA plain knit according to gauge: (a) 100 μm versus 200 μm and (b) 150 μm versus 250 μm.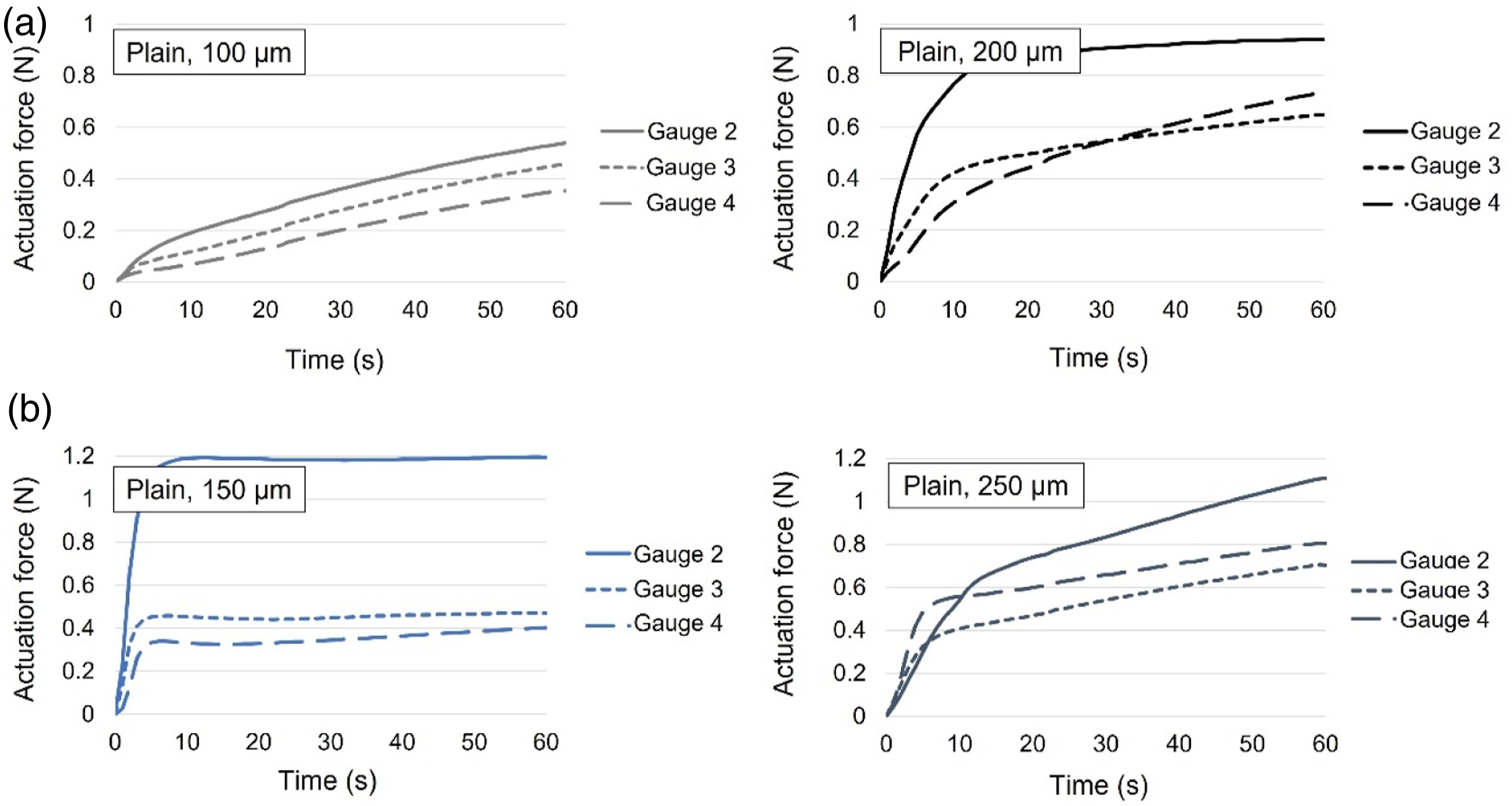
The SMA rib knit exhibited a high actuation force at different gauges depending on the diameters of the knitted SMA modules (Figure 7). For a module of 100 μm diameter, the actuation force of the 3 mm gauge increased rapidly until 10 s after the actuation began, whereas that of the 2 mm gauge was the highest after 30 s. For the module with a 200 μm diameter, the actuation force increased gradually after the actuation began, and was the highest for the 3 mm gauge 30 s and 60 s after the actuation began. In the case of the module with a 150 μm diameter, the actuation force in the 2 mm gauge was relatively high at both 30 s and 60 s after the actuation began. Moreover, it increased rapidly for 5 s after the actuation began and increased gradually thereafter. For the module with a 250 μm millimeter diameter, the actuation force was greater in the 3 mm gauge until approximately 10 s after the actuation began; however, it was greater in the 4 mm gauge thereafter. Differences in actuation force of SMA rib knit according to gauges: (a) 100 μm versus 200 μm and (b) 150 μm versus 250 μm.
Actuation characteristics of the plain knit in B-module.

SD = standard deviation; items in bold = significant t-value, items in italic = greatest value.
Actuation characteristics of the rib knit in B-module.

SD = standard deviation; items in bold = significant t-value, items in italic = greatest value.
Differences in actuation characteristics according to wale and course ratios
The actuation force of plain knit SMA modules (200 μm diameter with 2 mm gauge) in the R-module, with 2 × 1 and 3 × 1 ratios, increased rapidly up to approximately 15 s after the actuation began and subsequently plateaued. The knitted SMA modules with ratios of 1 × 1, 1 × 2, and 1 × 3 exhibited a relatively slow increase in the actuation force. That is, 2 × 1 and 3 × 1 modules with a large course ratio (horizontally long) exhibit a more rapid increase in the actuation force than the 1 × 2 and 1 × 3 modules with a large wale ratio (vertically long), including 1 × 1 (Figure 8(a)). The actuation force of the rib knit in the R-module increased rapidly until 10 s after actuation began. The actuation force increased most rapidly in the module with 1 × 3 ratios for diameters of 150 (gauge 2 mm) and 250 μm (gauge 4 mm) (Figure 8(b) and (c)). In the rib knit, 1 × 2 and 1 × 3 ratios with large wale ratios (vertically long), including 1 × 1 ratio, provided greater actuation forces than the 2 × 1 and 3 × 1 ratios with large course ratios (horizontally long). Differences in actuation force of knit ratio: (a) plain knit (200 μm), (b) rib knit (150 μm), and (c) rib knit (250 μm).
Because the plain knit comprised a single loop on one side, it was uniquely rolled in the purl direction.
13
The plain knit modules with a ratio of 1 × 3 had a lower actuation force than those with other ratios because they were in a bistable state during actuation when the plain knit module was designed to be long with a wale ratio (Figure 9(a)). Additionally, the large actuation force of rib knit with large wale ratios can be attributed to the alternating knit and purl loops of the rib knit in the wale direction. That is, the number of loops in the course and those to be contracted is small in the knit module with a large wale ratio. Motion difference of knitted SMA module after actuation: (a) Bistable plain knit and (b) differences in actuation motion according to loop ratios.
Actuation characteristics of plain knit in the R-module.
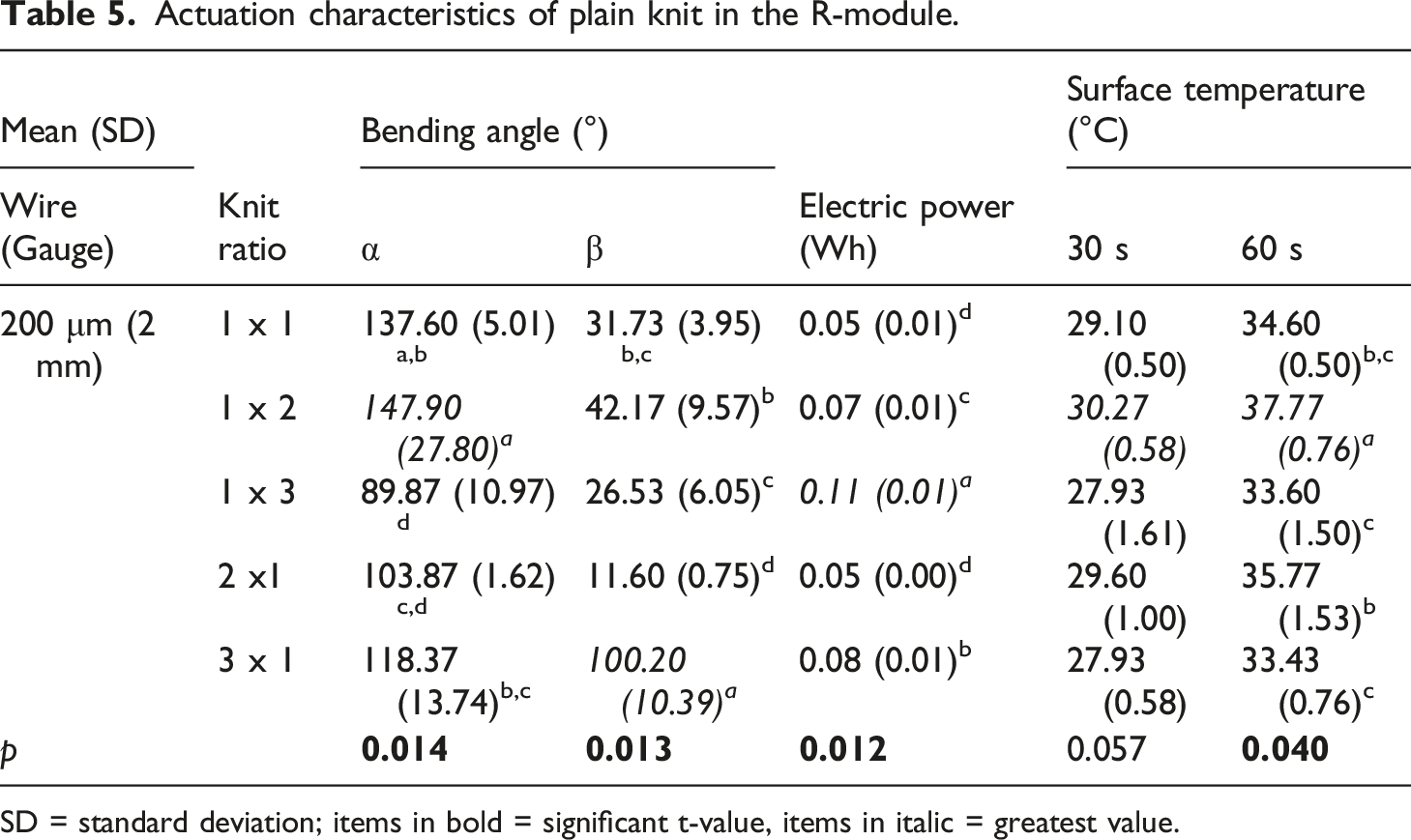
SD = standard deviation; items in bold = significant t-value, items in italic = greatest value.
Actuation characteristics of the rib knit in the R-module.

SD = standard deviation; items in bold = significant t-value, items in italic = greatest value.
Difference in actuation characteristics between B-module and H-module
Actuation characteristics of the H-module.

SD = standard deviation; items in bold = significant t-value, items in italic = greatest value.

Differences in actuation force change between the B-module and H-module: (a) plain 200 μm × rib 150 μm, (b) plain 200 μm × rib 250 μm, (c) rib 150 μm × plain 200 μm, and (d) rib 250 μm × plain 200 μm.
The bending angle was higher in the plain knit 200 μm × rib knit 150 μmand plain knit 150 μm × rib knit 200 μm modules in H-modules. In the α (top) area, the modules of the plain knit 200 μm × rib knit 150 μm (Figure 11(a)) and rib knit 150 μm × plain knit 200 μm (Figure 9(c)) satisfied the requirements for assistive rehabilitation gloves. Conversely, the β (middle) area shows a relatively small bending angle ranging from 3.93 (1.70)° to 37.03 (2.32)°. Further, the actuation of the H-module began later than that of the plain knit (200 μm) module in the plain knit 200 μm × rib knit 250 μm (Figure 11(b)). The H-module made based on plain knit did not actualize faster than the single plain knit module because of the relatively low actuation force and slow actuation time induced by the long rib knit module used in the course direction. Conversely, the H-module based on the rib knit contracted faster than a single plain or rib knit module and assisted the bending of the plain knit. Consequently, it achieved faster actuation because it used a rib knit that is long in the wale direction (Figure 10(a), (c), and (d)). Differences in bending angle change between B-module and H-module: (a) plain 200 μm x rib 150 μm, (b) plain 200 μm x rib 250 μm, (c) rib 150 μm x plain 200, and (d) rib 250 μm x plain 200.
Suggestion and validation of design guidelines for assistive rehabilitation gloves
Design guidelines for assistive rehabilitation gloves.
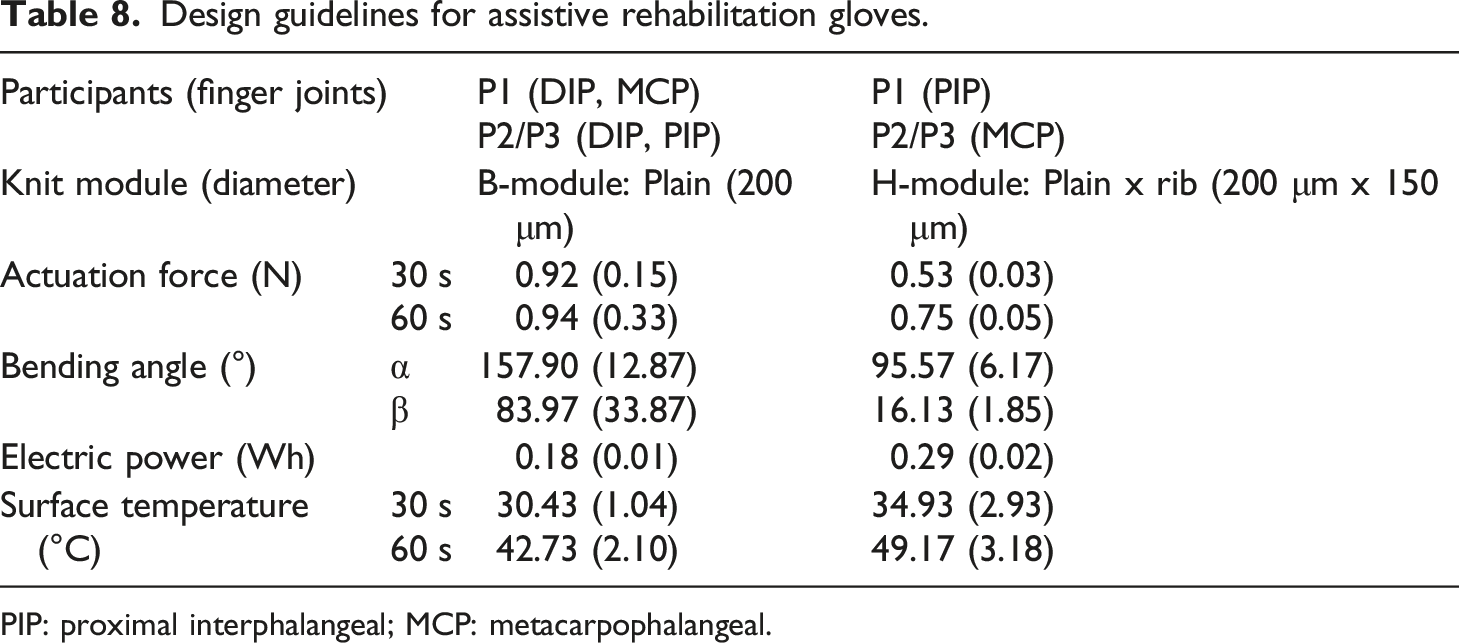
PIP: proximal interphalangeal; MCP: metacarpophalangeal.
Finally, by applying the developed design guidelines (Table 8), rehabilitation aid gloves were prototyped according to the proposed scenario. Specifically, knitted SMA modules aligned with the joint angles of the three hemiplegic patients’ fingers were applied to each finger joint. To prove that the bending angle of the developed SMA glove was similar to the actual participants' data excluding individual differences in human body movements, we produced a dummy hand and used it for evaluation. The results confirmed that the bent dummy hand extended similarly to the hemiplegic hand in all three gloves prototyped (Figure 12). These results indicate that our scenario was demonstrated through a case study of a rehabilitation glove for extension motion in hemiplegic patients by proposing a method to map the actuation characteristics of knitted SMA modules based on the force and joint ROM required for hemiplegic patients to extend their hands. This method of proposing technical specifications designed based on anthropometric data from actual users will be helpful for researchers in developing various wearable assistive devices with desired actuating performance. Prototyped gloves before and after actuation.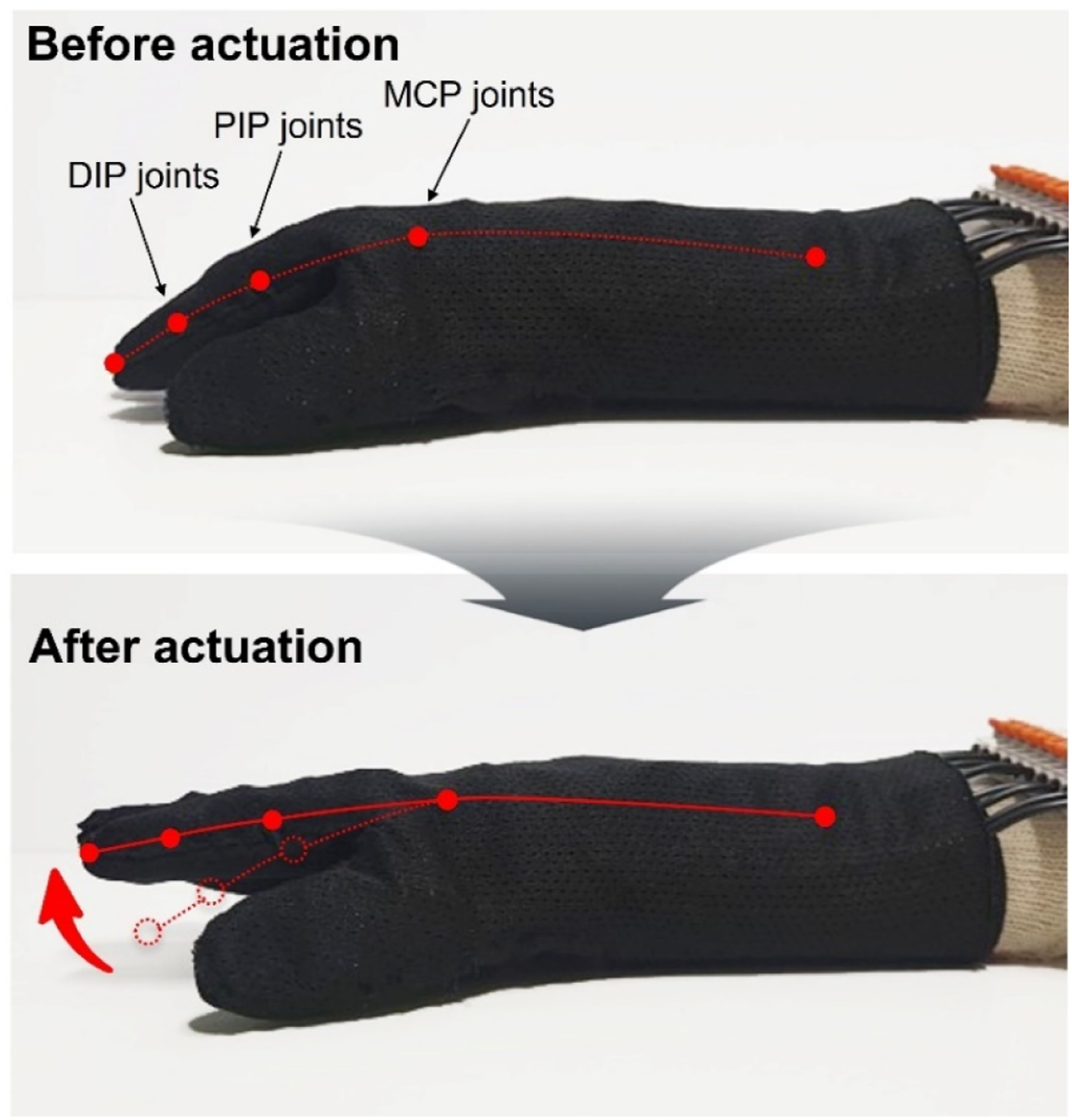
Discussion
We designed an SMA wire into a knit structure and determined actuation characteristics according to the knit modules, either plain or rib, and suggested design guidelines for knitted SMA modules in developing wearable devices. In this study, we prototyped assistive rehabilitation gloves, as a particular wearable device scenario. The actuation performance of knitted SMA differed depending on the knit gauge. These findings corroborated the findings of Eschen & Abel, 12 who analyzed actuation characteristics according to the space between knit loops. Knit is a textile with the characteristic that loops are organically connected to each other and the gauge varies depending on the diameter of the material used. 24 That is, the thickness of the yarn used influences the space between loops, which in turn influences the flexibility and actuation force of the knit textiles.12,13 The space between the knit loops is significantly influenced by the actuation force because the rib knit is relatively three-dimensional compared with the plain knit, in which the knit and purl alternately cross each other in the vertical direction. 29 The findings of this study reveal that the actuation force of the rib knit is more noticeably affected by the knit gauge compared to the plain knit, owing to their inherent characteristics. These insights could offer valuable implications for researchers involved in the development of knitted actuators employing smart materials like SMA.
Moreover, the actuation performance of a knitted SMA could be influenced by the ratio of the number of knit loops. A plain knit, in which the shape of the loop comprised a knit or purl that is identical on one side, can roll up by itself and influence the length-wise and width-wise characteristics of the knitted fabric.29,30 Moreover, the unique characteristics of the knits should be considered when designing the SMA wire as a knit structure and they should be manufactured at a loop ratio of at most 1 × 3 to minimize the bistable characteristics during operation. Furthermore, we suggest the use of knit modules with a 1 × 2 ratio, a large bending angle and a constant wale to develop wearable products because of the asymmetric actuation motion between the top and middle of the knitted module. That is, the characteristics of the knit textiles support the results of the number of wales and courses. 6 These findings underscore the significance of manufacturing knitted actuators using smart materials for wearable products intended for human use, with careful consideration of the number ratio of knitted loops. The study's importance lies in its provision of a recommended knit loop ratio for the successful application of wearable assistive products based on these results.
Furthermore, knit modules can be applied to joint areas with large skin surface changes by simultaneously providing the bending and contraction characteristics of plain and rib knits. The H-modules combined with the 150 μm µm diameter had lower electric power and a higher bending angle, making them more suitable for application in wearable assistive devices. The actuators applied to wearables, such as knitted SMA modules are influenced by various factors besides actuation force, and corroborate the findings of previous studies, in which a gripping aid was developed by simulating the finger bending angle. 15 Additionally, the scope of the H-module was limited by its higher temperature increases and relatively high electric power compared with the B-module during operation. However, the results of the proposed optimal knit module for assistive rehabilitation gloves corroborate a previous study, in which an elbow brace that provided pressure and heating functions was developed using SMA plain and rib knit modules followed by a human safety evaluation. 16 In addition, this study prototyped a rehabilitation assistive glove by considering constraint conditions such as the material properties of the glove to be attached, connection conditions between the glove and the module, physical properties of the connected area, and support constraint conditions. Thus, these findings indicate the potential for the actuating characteristics of the knitted SMA module to be effectively derived from the developed prototype.
In previous studies, various actuation characteristics of knitted SMA modules have been analyzed.6,12,17,20 However, we present the possibility of developing wearable products with high usability by analyzing the actuation performance of the knitted SMA for application to the human body using a multidimensional method, which differs from previously adopted approaches. The human body encompasses a diverse range of joints, enabling multiple movements such as bending, unfolding, abduction, adduction, and rotation. These findings hold great promise in facilitating a wide array of movements for users of wearable assistive products, particularly when adapting to the curved human body. Importantly, they propose an optimal operating tendency for actuating force, bending angle, and shrinkage rate across multi-axial directions, complementing the unidirectional contraction force established in previous studies. This enhances the meaningfulness of our research. Furthermore, we identified a gauge that could produce optimal actuation performance according to the wire diameter and knitting technique of each module. These findings offer valuable guidance to researchers when choosing an appropriate gauge for designing knitted actuators. The actuating characteristics of smart materials in knitted textiles with varying spaces between loops can vary significantly. This study successfully overcame the limitations of previous fragmented actuation performance analyses by conducting a comprehensive examination of knitted SMA actuation characteristics, specifically for wearable applications. Moreover, the significance of this study lies in the provision of design guidelines for wearable assistive devices, such as rehabilitation assistive gloves, tailored to the user's body, utilizing data from hemiplegic patients.
Conclusions
This study established a set of design guidelines for knitted SMA modules to develop wearables through a multidimensional analysis applicable to the human body. These findings suggested to other researchers the proposition of optimal knitted SMA modules based on required specifications and anthropometric data when developing wearables. The method of selecting the optimal knitted module reflecting anthropometric data provided the possibility of solving the limitation that applying the driving characteristics of knitted SMA to wearables in previous studies was challenging. Furthermore, the ratio of the knit gauge and loop that derive the maximum actuating force and optimal actuation motion of our proposed wearable assistive device provided the possibility of being applied to developing wearables using other intelligent materials by designing knit structures. However, this study had certain limitations. The actuation characteristics may differ depending on the yarn twisting method or combination of textiles used because we analyzed the compositional characteristics of the SMA wire with a limited thickness. Furthermore, it is essential to investigate the impact of wrapped density on the driving performance of the knitted SMA when using polyester yarn for spinning SMA wire. Future studies should focus on analyzing the variations in driving performance based on different wrapped densities. Additional experiments are needed, specifically using gloves rather than test modules, as the constraint conditions may differ when connected to other textiles. Moreover, to ensure the practical applicability of knitted SMA actuators, systematic validation for repeatability and washing durability will be conducted in future studies. Despite the limitation of using anthropometric data of specific patients with the same MAS, this study can provide valuable guidelines for knitted SMA modules with ergonomic wearable designs. Furthermore, the knitted SMA could be used as fabric actuators for wearables for other reasons. We provided a design method for knitted SMA to be used as flexible and lightweight actuators in wearables and contributed to increasing their applicability. We will develop wearables by applying the optimal SMA knit design method for hemiplegic patients.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by the National Research Foundation of Korea (NRF) grant funded by the Korean Government (MSIT) [2022R1F1A1069985] and [RS-2023-00208052]; Seoul National University Research Grant [0420-20210134]; the Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education [2020R1A6A3A01099046].