
Abstract
Shape memory alloys (SMAs) have an innate property that allows them to return to a memorized form when stimulated. They have been recently designed as flexible fabrics for use in wearable assistive devices. This study aimed to develop a rehabilitation assistive glove with good wearability for a hemiplegic patient using a knitted SMA with a high-unidirectional contractile response. We fabricated warp-knitted SMA actuators, which had higher contractile responses than those of weft-knitted SMA. The use of a knitting loom allowed these actuators to fit all the fingers of a patient. We developed a full-fabric glove, placed the SMA wires on the finger regions to form a tendon-driven structure, and attached knitted SMA actuators to the dorsal and palmar sides of the hand to assist flexion and extension. The joint range of motion after glove actuation increased by 11.620% and 141.710% in flexion and extension, respectively. The range of motion improved more with glove rehabilitation than with thermal stimulation or no actuation. The grip force also increased by 52.400% after rehabilitation exercises. The safety of the heat generated during actuation was confirmed, and its applicability as a thermal stimulus was validated (based on increased skin temperature). These outcomes suggest the practical potential of warp-knitted SMAs in fully fabricated wearable assistive devices.
Introduction
Shape memory alloys (SMAs) are intelligent materials with innate properties that allow them to return to memorized forms caused by a phase transformation induced by an external stimulus. 1 SMAs are extensively used in various applications, including actuators, medical devices, and aerospace machinery. 2 Among them, nitinol, an alloy of nickel and titanium (Ni-Ti), is the most commonly used alloy that exhibits a shape-memory effect. 3 SMAs have a significant advantage in that they have the unique characteristics of shape morphing caused by the shape memory effect. However, they also have disadvantages, such as non-linear behavior, complex control, and low-energy efficiency. 4 Thus, several attempts have been expended to develop various wearable devices using SMAs.
Numerous researchers have designed SMA wires of various shapes to develop wearable devices that can be worn on the human body. A rehabilitation exoskeleton has been designed based on three-dimensional (3D) printing incorporating an SMA wire to facilitate elbow joint motion in stroke patients with weakened muscle strength. 5 A pronation/supination axis design has been proposed for an arm using an SMA wire. 6 The researchers developed an exoskeleton rehabilitation device with three degrees of freedom that enabled complex movements along all three axes regardless of the direction of the elbow and shoulder joints. In addition, a hand exoskeleton robot operated based on a tendon using an SMA wire has been proposed for use in rehabilitation exercises and for assisting people with hand disabilities. 7 A lightweight wearable device that can apply finger pressure with an SMA wire has also been developed. 8
Recently, some design methods that are flexible but can maintain a driving force have been proposed to apply SMAs to wearables. In particular, some researchers designed SMA wires as fabrics to minimize the burden on the human body. Several techniques that utilize SMAs as textiles, single wires, and springs have been proposed. Incorporating SMAs into textiles significantly expands the achievable strain range, rendering them adaptable for a variety of applications. 9 An SMA wire is inserted into the fabric, contractile forces are used to supplement the arm strength of the wearer to lift a barbell (with a weight of up to 4 kg) by wearing it as a garment. 10 Smart pants embedded with SMA wires have been proposed to provide ankle support during walking. 11 Morphologically adaptable shells comprising glass fibers and SMA fibers exhibited a diverse range of actuation modes, thereby demonstrating their potential utility as dermal actuators within the field of soft robotics. 12 However, numerous SMA wires need to be inserted to assist and support the human body. Therefore, several researchers have proposed SMA wire design methods as knitted fabrics.13,14 Topographically self-fitting pants have been proposed by designing an SMA wire in a cylindrical garter-knitted structure, 15 and a gripping aid has been proposed using the bending motion of the SMA plain-knitted structure. 16 In another study, the researchers designed a knitted SMA as a double module to provide bending and contraction simultaneously to design an elbow brace for rehabilitation. 17
Particularly, this knitted structure is well known for its use in producing garments in general and in making fabric by interlooping one or more yarns. 18 Knitting creates continuous stitches by pulling previously formed loops to form new loops. 19 Thus, knitted fabrics have inherently high elasticity, and their properties vary depending on the knitted structure. 20 Most knitted SMA-based wearables use a weft-knitted structure.15–17 SMAs with weft-knitted structures can be transformed into various structures that allow additional compression types beyond uni-directional contraction, 14 but induce low-driving forces. Furthermore, the axial contraction of both the SMA wire and weft rib-knitted SMA, as shown in prior studies, has limitations in wearable devices owing to their low contraction rates. Warp knitting is also extensively used in various fields, such as medicine, engineering, and clothing, and can be designed for the mass production of more complex structures compared with weft knitting. 21 Thus, in this study, we designed warp-knitted SMA actuators with tendon-driven structures, which have not been attempted before, to provide high shrinkage in the axial direction using relatively small amounts.
The hand comprises many joints, muscles, tendons, and other anatomical structures within a relatively small area; it is agile because of its dynamic anatomical structure, but vulnerable. 22 In particular, hemiplegia after a stroke causes loss of upper limb function due to weakness, spasticity and/or contracture, making it difficult for patients to perform activities during their daily lives. 23 Repetitive hand flexion and extension exercises can relieve these symptoms and help restore hand function. 24 The use of hand assistive devices for repetitive exercise therapy has a positive effect on the outcome of exercise. 25 Alternatively, assistive devices, such as rehabilitation assistive gloves, can improve the function and performance of weakened hands of patients in activities in their daily lives. 26 Furthermore, therapy using rehabilitation assistive devices has been demonstrated to be more effective for motor recovery than conventional therapies without assistive gloves. 27 Because of the increased interest in treatment using rehabilitation assistive devices, many researchers have recently proposed ways to develop wearable hand assistive devices such as gloves. However, rehabilitation assistive devices with large volumes and rigid materials still limit the continued usage of the product.
Therefore, we aimed to develop a glove with good wearability that can assist the flexion and extension exercise of the hand of a hemiplegic patient by applying the shape-changing technologies of the knitted SMA, leading to high usability. We first proposed a warp-knitted SMA with a high-contraction rate as a tendon-driven structure to show that it can be applied to a rehabilitation glove that can assist hand flexion and extension movements. Thus far, we manufactured the SMA actuators with a high-contraction ratio in the axial direction of the knitted warp-knitted structure using a knitting loom. We then created a glove that can assist the flexion and extension of the hands of hemiplegic patients using a tendon-driven structure. To provide optimal wearability to actual users, we fabricated the wearing part of the glove and the driving part, which is an actuator, with the entire fabric. We hypothesized that the grip strength and range of motion (ROM) of the finger joints in a hemiplegic patient would increase after rehabilitation exercises using our full-fabric rehabilitation glove.
Methods
Materials
Characteristics of the material used.

Note: SMA = shape memory alloy.
Design and fabrication of rehabilitation assistive glove
Knitted Shape memory alloy
We compared the contraction ratios by designing an SMA wire in knitted structures. A weft knit creates a textile by creating loops horizontally, and a warp knit provides vertical connections as loops are crossed (Figure 1).
29
Most previous studies that designed SMA wires in knitted structures used weft knits.14,16,17 Warp knitting cannot be easily used because the knitting process is difficult to implement. However, there is no significant difficulty in mass production because a weft knit can be knitted through existing commercialized knitting machines.
30
Thus, we compared the contraction ratio by designing an SMA wire in weft-knitted and warp-knitted structures. The weft-knitted structure consisted of a plain, rib, garter, and I-cord,14,31 and an open/closed lap was chosen for the warp knit to provide high-contraction actuation (Figure 2). Knitted structures: (a) weft, (b) open-lap, and (c) closed lap warp knitting. Experimental knitted modules.

Except for the I-cord, which was made using an I-cord knitter machine (Tulip Company Limited, Hiroshima, Japan), all the weft knits (plain, rib, and garter) were made by hand knitting, and all the warp knits were made with a 3D printed knitting loom. A square knitting room was used with one rod on each short side and ten on each long side. The thickness of each circular rod was 3 mm, and ten rods were arranged at 7 mm intervals on the long side (refer to Figure 6(a)). We turned the SMA wire from right to left around the rod on the front long side, sending the wire toward the rod on the back, and repeated this for five rods. Afterward, we used the needle to cover the next row of wires with the previously finished lower wire. The loops of the first row of warp knit were then created. Next, we completed the warp knit by repeating this on the front and back rods alternately. We attempted to obtain the same results by applying uniform force during the hand-knitting process, and we expect that switching to machine knitting will enable the production of more uniform actuators. The detailed dimensions of each module were measured at their most shrunk states. We then measured the contraction ratios using a drafting ruler. The lengths before and after actuation of the warp-knitted SMA actuators were measured three times. Specifically, we measured the length after stretching to the same length of the knitted SMA actuators and then measured the length after contraction by driving it with heat. All the measurements were taken without an additional load. The difference in the lengths before and after actuation was expressed as a percentage. The structure with a higher contraction ratio was then chosen as the actuator for rehabilitation assistive gloves.
Fabrication of rehabilitation assistive glove
We obtained 3D hand shapes for users by employing a 3D human body scanner to develop glove patterns (Artec Eva, Artec 3D, Luxembourg) (Figure 3(a)). For the glove pattern, we utilized a pattern drafting method,
32
which flattens the 3D hand shape into two dimensions. This method is suitable when accurate data cannot be extracted by direct hand measurements, such as in patients with hand stiffness or curl. By modifying the completed basic glove pattern, we designed a more extended version of the glove up to the elbow point to accommodate the SMA’s contraction ratio. Before attaching the operating part, we conducted several rounds of prototyping and modified the glove design to enable the gloves to be donned and doffed easily and independently by the patient (Figure 3(b)). Actuators using the knitted SMA with a large contraction rate were then placed on the back of the hand and palm on the developed glove, and the contraction force of the knitted SMA was used as the driving force in a tendon-driven method (Figure 3(c)). Schematic diagram of the gloves: (a) three-dimensional hand shape, (b) glove design, and (c) actuator structure.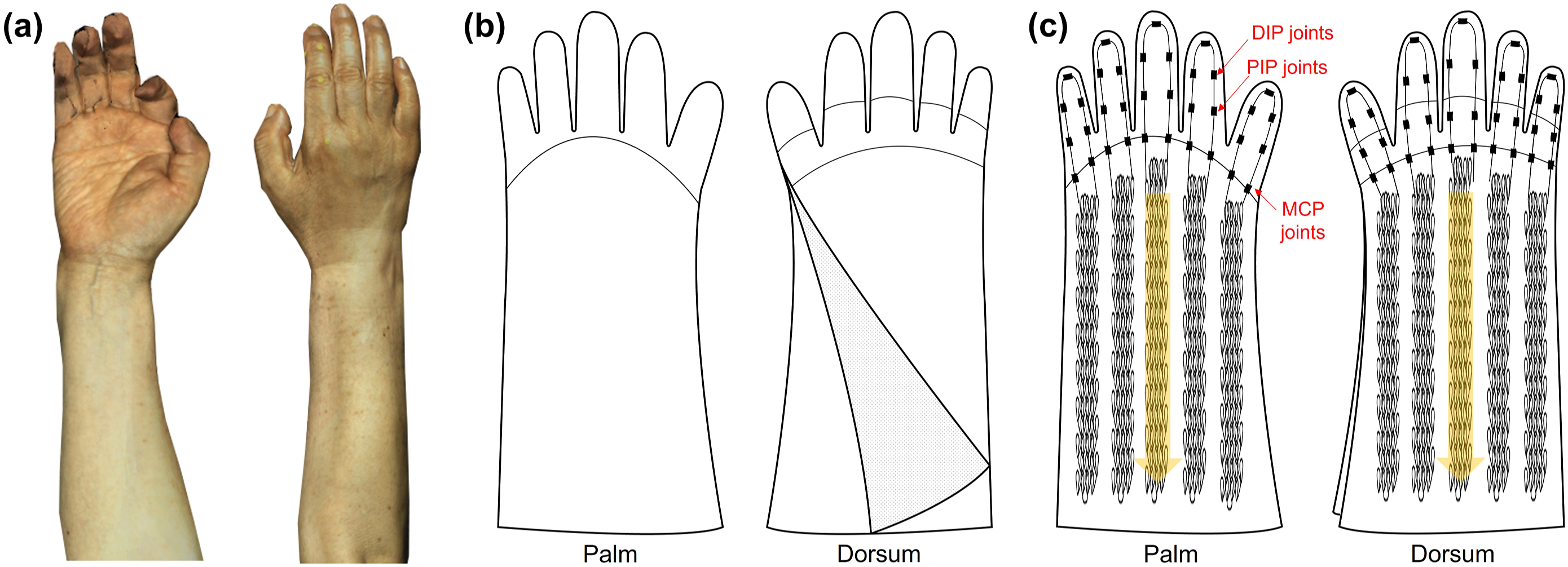
Evaluation
Participants
Demographic characteristics of the participant.

Experimental process
Sensor attachment
Upon the selected participant’s visit to the laboratory, we placed her hemiplegic hand on a desk and measured the joint ROM of the fingers using flex sensors (Resistive Flex Sensors, Spectra Symbol, Mansfield, TX, USA). We conducted a pre-experiment to ensure alignment between the resistance and angle of the sensor. Subsequently, the sensors measured the amount of bending and can be used as goniometers. The sensors were inserted into the proximal interphalangeal (PIP) joint on the palmar side of the glove and the metacarpophalangeal (MCP) joint on the posterior side of the glove (Figure 4(a)). Owing to the short length of the patient’s thumb and little finger, attaching the sensor was infeasible. Thus, the sensor was omitted from the PIP joint of these fingers. In addition, we attached an iButton temperature sensor (DS1923, Dallas Instrument, Lawrenceburg, KY, USA) on the hemiplegic side to measure changes in the skin temperature and the temperature outside the glove during actuation. Four sensors were attached to the dorsal side of the hand and the middle finger inside and outside the glove (Figure 4(b)). These are the regions in which the knitted SMA modules and SMA wire were inserted. The change in the skin temperature inside the glove was measured to evaluate the safety and thermal stimulation of the Joule heating generated during the actuation of the knitted SMA in the developed glove. Sensor attachment regions: (a) flex sensor and (b) iButton.
Functional evaluation of joint range of motion
We measured the joint ROM before and after glove operation as an objective functional evaluation test to explore their effectiveness. We instructed the participant to wear the rehabilitation assistive glove and then flex and extend their hand (i.e., flexion exercise vs extension exercise). At this time, we measured the joint ROM at maximum extension and maximum flexion of the participant’s hands. However, we did not explain the details of the glove operation and actuated the glove randomly during the exercise for objective evaluation. The participant slowly flexed for 8 s and released her hand on the hemiplegic side (with the glove on) based on our instructions, repeating the motion three times. A 1-min rest period was allowed between each flexion movement. After the flexion motion had been completed, a 10-min rest period was allowed until the onset of the extension motion. Subsequently, the participant slowly extended and released the same hand, and the motion was repeated three times. A 1-min rest period was also given between each extension movement. The joint ROM was measured using flex sensors inserted into the glove. Two sets of flexion and extension motions were performed to compare the joint ROM before and after glove actuation.
Rehabilitation exercise assessment
Summary of rehabilitation exercise.

Note: ROM = range of motion, SMA = shape memory alloy.
Data analysis
We analyzed the differences in the joint ROM and skin temperature before and after actuating the developed gloves using the Mann–Whitney U-test to confirm the assistance functionality of the gloves. We then analyzed the differences in the joint ROM and grip force before and after rehabilitation exercise without SMA, rehabilitation exercise with SMA, and using thermal stimulation only based on the Kruskal–Wallis H-test and Mann–Whitney U-test. All analyses were performed using SPSS (version 26.0, IBM, Armonk, NY, USA). The significance level was set at p < .050.
Results
Differences in contraction ratios according to knit structure
We analyzed the differences in contraction ratios according to the SMA knit structures (Figure 5). Table 4 shows that the warp knits, such as open and closed laps, had higher contraction ratios than the weft knits, such as I-cord, rib, and plain knits (18.815 (0.014)% versus 13.804 (0.023)%) (p = .000). Specifically, the contraction ratios of the weft knits exhibited a large trend in the order of the garter, plain, rib, and I-cord knit structures (p = .049). Among the weft knits, the contraction ratio of the I-cord tended to be the lowest (10.859 (0.004)%), and that of the garter knit tended to be the highest (15.698 (0.016)%). Results of contraction ratio for SMA knitted structure. Differences in contraction ratio according to the SMA knitted structure. Note: The alphabetical order is the same as the order of mean difference according to the Duncan test; bold item = significant value.

For warp knits, the contraction ratio of the closed loop tended to be higher than that of the open loop (19.397 (0.018)% versus 18.234 (0.004)%); however, the difference was not significant (p = .513). In particular, the warp knits with closed loops have a higher contraction ratio (equal to 3.700%) compared with the contraction ratios for the garter knit used by many researchers.29,30 In previous studies, weft-knitted actuators were used as assistive devices. However, the weft-knitted structures were knitted perpendicular to the contraction direction. These results indicate that the weft-knitted actuators we developed exhibited strong curling or bending properties, depending on the weft-knitted structures. Conversely, we can infer that the warp-knitted actuators exhibited a higher contraction ratio because they were knitted in the same direction as the shrinkage direction. Thus, we chose a closed-lap structure among the warp knits for our rehabilitation glove’s actuators.
Rehabilitation assistive glove
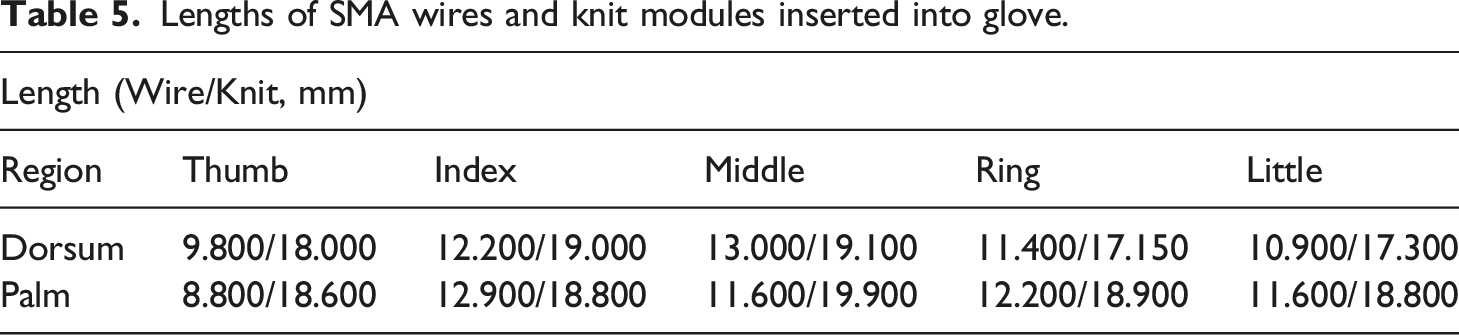
We knitted ten actuators using a 3D printed knitting loom, five for flexion and five for extension motions. Each actuator was composed of a wire part and a knitted part, and the size of each SMA actuator was determined according to the length of each finger of the user (Figure 6(a)). The base glove to which the actuators were connected was designed to be a long glove up to the lower arm, reflecting the actuator lengths. The palm and dorsal regions of the glove where the knitted SMA actuators were placed were composed of insulating fabric to provide the user with safety due to Joule heating during actuation. In addition, we cut the sideline on the thumb side of the glove and extended the closure using Velcro for ease of donning and doffing by the user who experienced difficulties in moving her hand and arm. Rehabilitation assistive glove: (a) SMA actuator and knitting loom, (b) actuators integrated into the glove, and (c) final prototype.
Lengths of SMA wires and knit modules inserted into glove.
Changes in joint ROM after actuation
Finger joint ROMs before and after glove operation.

Note: bold item = significant value.
Changes in joint ROM after rehabilitation exercise
Differences in the finger joint ROM before and after rehabilitation exercise.
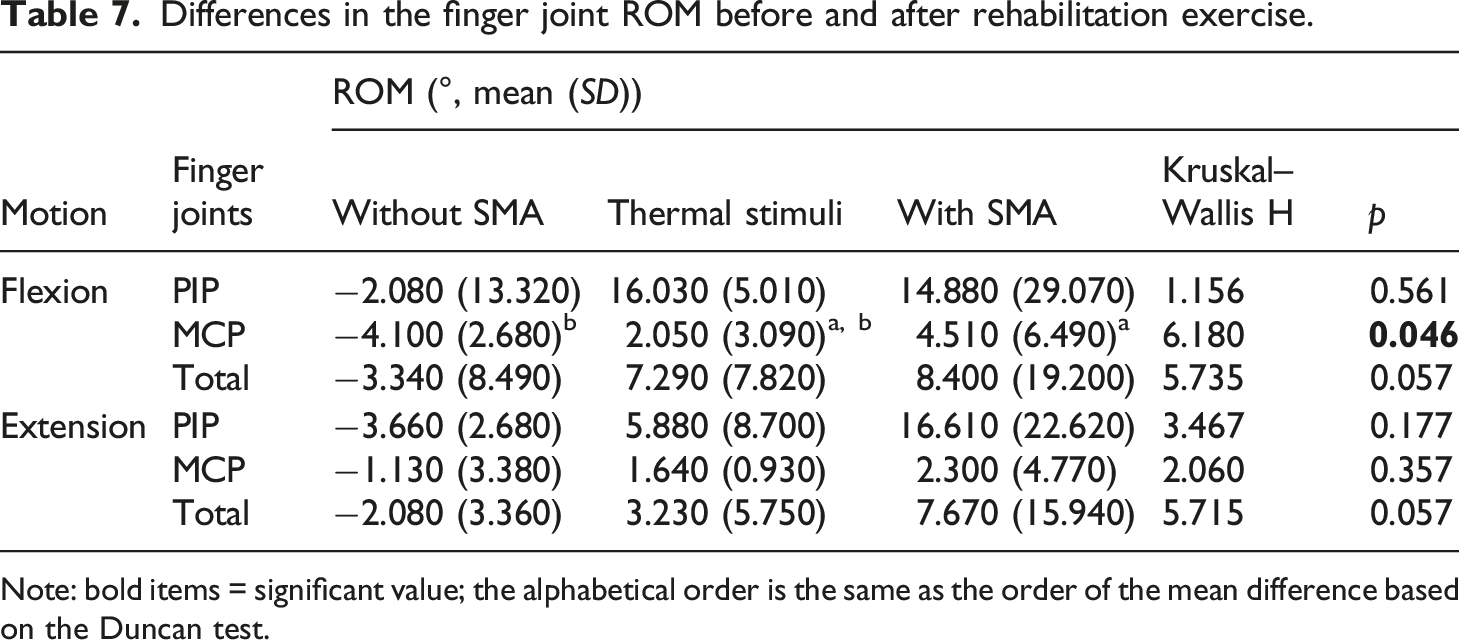
Note: bold items = significant value; the alphabetical order is the same as the order of the mean difference based on the Duncan test.
Changes in grip force after rehabilitation exercise
Differences in the grip forces before and after rehabilitation exercises.

Note: bold item = significant value.
Changes in skin temperature after glove operation
Differences in skin temperature before and after SMA actuation.
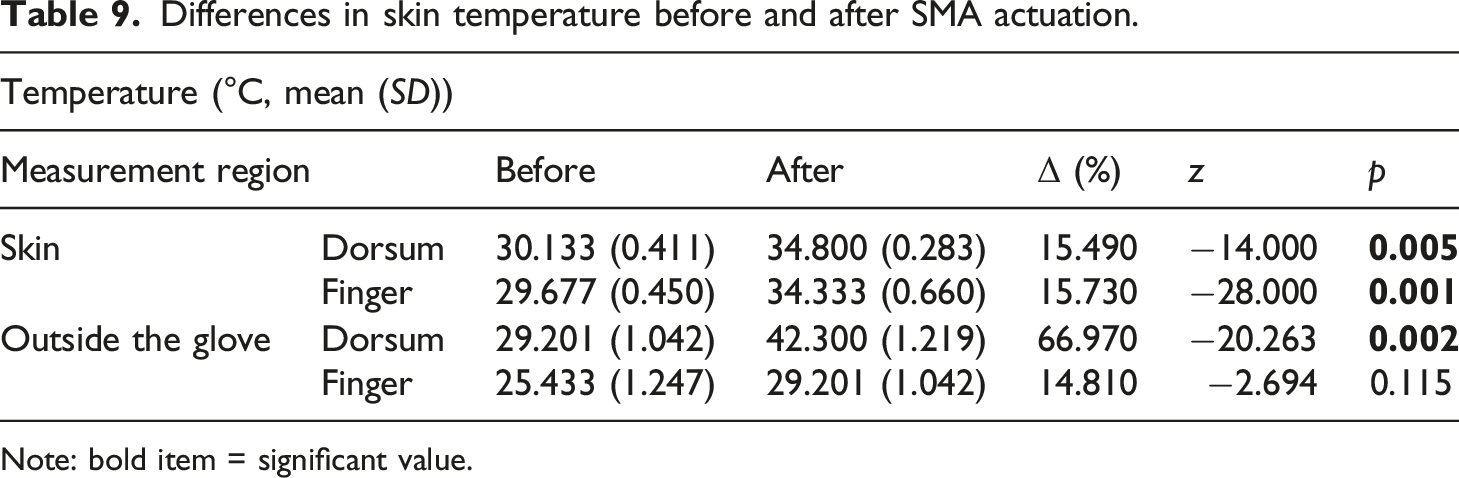
Note: bold item = significant value.
Discussion
This study demonstrated the hand rehabilitation effects of a developed rehabilitation glove with integrated knitted SMA actuators for a patient with hemiplegia. We designed the SMA wire with a warp-knitted pattern and observed a higher contraction ratio compared with the weft-knitted design. We designed a full-fabric rehabilitation glove for wearability and ease of donning/doffing and inserted a warp-knitted SMA as a tendon-driven actuator. We demonstrated that the flexion and extension of the fingers of a hemiplegic patient can be assisted when performing ROM exercises using the developed rehabilitation glove. We proposed that the warp-knitted SMA can be used as a flexible and lightweight actuator to aid flexion and extension rehabilitation exercises.
We designed the SMA as a knitted structure and demonstrated that the warp-knitted structures yielded larger contraction ratios than the weft-knitted structures. In previous studies, wearable products were mainly developed using garters,13,15 plains,14,16,17 and ribs14,16 in weft knits. However, we found that this warp-knitted structure yielded a higher contraction ratio than the weft-knitted structure. Based on the results of this study, we recommend the use of warp knits for wearable products that require a high shrinkage ratio. Warp-knit technology is generally implemented with a warp-knitting machine and generates structures that are extensively used in the production of medical and industrial textiles because (a) they can be transformed into complex forms, such as multi-axial warp knitting, and (b) the technology has high-productivity advantages.21,34 In particular, we can infer that among the warp-knitted structures, the higher contraction ratio in the closed-lap structure is because the loop legs cross each other in this structure, unlike the open-lap structure. 35 Furthermore, the Raschel and Tricot warp-knitting machines can knit up to 1500 denier and 240 denier yarns, respectively. 29 Thus, the developed warp knitting SMA module has the potential to be applied as a mass production technology using a warp knitting machine with a larger gauge than the gauge commonly used in fabric production. Additionally, during the knitting process, machine knitting is fully possible because the thin metal wire can be bent with a weak force without having to be axially stretched. This suggests that our new warp-knitted actuator has the potential for mass production as well as customized products.
The findings of the functional evaluation indicate that glove operation in a hemiplegic patient has a significant effect in terms of increasing the finger joint ROM in hand extension motions. Unlike other joints, the MCP joint motion tended to decrease by −34.390% during flexion. The patient had spasticity in her fingers, which caused stiffness and unintentional resistance when applying bending force. The muscle tone increase after the exercise might also produce this effect. 35 This indicates that simple repetitive motions of flexion and extension of the hands of hemiplegic patients may reduce the joint ROMs of fingers. Patients with cerebral lesions temporarily experience increased muscle tone and spasticity, which is indicative of partial contraction of passive muscles. 36 In particular, there is a risk of increasing side effects, such as increased muscle tone, when patients attempt to perform upper extremity rehabilitation exercises independently. 37 Additionally, the joint ROM increases were largest after the actuation of the SMA during both flexion and extension exercises. These findings indicate that using the rehabilitation glove with SMA actuators, which induces thermal effects and generates actuation forces, can be a practical approach for improving joint ROM in individuals with hemiplegia. The joint ROM of fingers after extension exercises had the most significant increase after SMA operation in both PIP and MCP joints. However, in the PIP joint after the flexion exercise, the ROM increase tended to be significant when thermal stimulation was applied compared with the ROM induced after SMA actuation. We can infer that this is attributed to the fact that only thermal stimulation can cause muscle relaxation and increase the joint ROM, particularly during rehabilitation in flexion motion, which causes increased stiffness.38,39
Experiments demonstrated that the grip strength increased during the actuation of the developed glove compared with heat stimulation and non-actuation. These results indicate that using the rehabilitation glove can positively affect grip strength during rehabilitation exercises. A study that proposed the use of hand splints to assist in hand extension exercises also proved that extension exercises increased grip strength. 40 These results support the findings of another study that suggested a close relationship between muscle tone and strength 38 and those of a study in which rehabilitation exercises were conducted using a soft robot hand that demonstrated a significant increase in voluntary grip strength in both mild and severe finger flexor stiffness cases. 41 Because an increase in grip strength means functional recovery, 42 it can be shown that performing rehabilitation exercises using the warp-knitted rehabilitation glove developed can lead to the functional recovery of the hemiplegic side’s hand. To date, soft robotic gloves using SMA wire have been developed based on tendon-driven,7,8,43 and hard components still have to be added to increase the driving force. A rehabilitation assistive glove using an actuator made of a new flexible and soft textile is proposed for soft robotic applications based on the findings of this study. This supports the findings of a prior study that proposed design guidelines for rehabilitation gloves using a textile actuator with weft-knitted SMA fibers on the basis of anthropometric data from hemiplegic patients with specific spasticity grades. 28 In addition, some stroke patients can induce joint movement with less force in case they are flaccid without stiffness, which will be helpful in rehabilitation to restore hand function.
Furthermore, after glove actuation, the temperature outside the glove increased to 42.300°C, and the skin temperature of the patient’s hand inside the glove increased to 34.333°C and 34.800°C on the dorsal hand side and fingers, respectively. The patient’s skin temperature did not exceed 41.900°C owing to the insulating fabric inserted into the glove, and hence, prevented deep dermal burns during rehabilitation exercises. 44 Because hemiplegic patients have a lower skin temperature than healthy adults, many previous studies demonstrated that providing a thermal effect helps relieve spasticity.45,46 Thus, the Joule heating generated during the operation of the developed glove increased the skin temperature of the patient, thereby justifying the functional capability of the rehabilitation glove in providing thermal stimulation capable of relieving muscle tone. Because hemiplegia patients have different symptoms, customized rehabilitation gloves must be designed for each patient even if they have the same degree of spasticity. Although this is a case study of a hemiplegic patient with specific spasticity, it is significant as it demonstrated for the first time the possibility of a novel actuator design based on the warp-knitted structure of an SMA wire.
However, this study has some limitations. While this study is meaningful in that we fabricated and prototyped a glove with integrated warp-knitted SMA and evaluated its feasibility with an actual stroke patient, additional validation with a larger sample size is desirable. Although we found a strong relationship between the muscle tone of the hemiplegic hand and the recovery of muscle strength and function through the use of the prototyped glove, the same results may not be obtained when there is severe spasticity. 38 That is, because the stiffnesses of the patient’s fingers vary, there may be cases where the effects of rehabilitation exercise are not noticeable in fingers and joints with severe stiffness characteristics; therefore, additional evaluations are required. This study presented the results of the evaluation based on short-term rehabilitation exercises. In future studies, it will be necessary to obtain the evaluation results based on long-term, repetitive rehabilitation exercises by using the developed gloves with hemiplegia patients having various degrees of spasticity. In addition, the characteristics of temperature changes versus the generated Joule heating time (when actuating the SMA actuator) should be analyzed because hemiplegic patients have a higher risk of thermal injury due to heating than healthy people owing to sensory loss on the hemiplegic side. 44 Nevertheless, this study proposed a new warp-knitted SMA actuator with a higher contraction ratio than the previously used weft-knitted SMA actuator. This actuator can be used in rehabilitation gloves to help hemiplegic patients during rehabilitation exercises.
Conclusions
This study demonstrated the positive effects of a developed rehabilitation glove with integrated warp-knitted SMA actuators on the ROMs of the finger joints, grip strength, and skin temperature in a hemiplegia patient. These findings suggest that the warp-knitted SMA, a soft actuator in a novel knit structure, is a potential material for wearable assistive products for rehabilitation. Specifically, the rehabilitation glove developed using a highly contractile, warp-knitted, SMA-based actuator demonstrated an increase in the joint ROMs of fingers and the grip strength of a hemiplegic patient after flexion and extension exercises. The safety of the SMA actuator was verified when used with the rehabilitation glove. Additionally, the heat generated provided positive thermal stimulation effects as in previous research. These findings show that the developed rehabilitation glove can potentially help the functional recovery of hemiplegic patients. Therefore, the warp-knitted SMA actuators, developed for the first time in this study, contributed to the increase in the applicability of lightweight, flexible, and highly contractile actuators for rehabilitation assistance devices. Additional research is required to optimize the design and function of the device for various patient populations with different grades of paralysis.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Seoul National University Research Grant in 2021; the National Research Foundation of Korea (NRF) grant funded by the Korean Government (MSIT) [RS-2023-00208052]; the Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education [2020R1A6A3A01099046].