
Abstract
This study proposed a new fiber Bragg grating-based smart ring for monitoring body joint postures occurred at elbow joint and knee joint positions. A single-mode fiber Bragg grating sensor was embedded into a 3D printed ring for sensing occurred deformation of the ring. The raw material used for fabricating the smart ring was polylactic acid, which was found to have the advantages of being flexible in nature and having ease of fabrication using fused deposition modeling method. The fabrication process of the fiber Bragg grating smart ring was characterized by the advantages of ease of handling, quick prototyping, high resolution, low cost, and time-saving. Bare fiber Bragg grating sensors were successfully embedded into hot printed polylactic acid material during the fused deposition modeling process, even the printing temperature of the printing nozzle exceeded 200℃. Two new smart wearable rings were fabricated and used to monitor systematic bend motion of elbow joint and knee joint. The measurement sensitivities of the two smart rings mounted at the elbow joint and knee joint were 0.0056 nm/° and 0.0276 nm/°, respectively. The corresponding maximum measurement angle within current calibration tests were 90° and 100°, respectively. The method of using both fiber Bragg grating and fused deposition modeling for sensor design can be extended for the fabrication of other sensors such as temperature sensors, strain sensors, pressure sensors, stress sensors, displacement sensors, and tilt sensors.
Keywords
Introduction
Fiber Bragg grating (FBG) sensing technology is a popular method for monitoring various physical parameters of the human bodies, such as blood pressure, postures, temperature change, etc. In recent decades, the FBG sensor as a wearable sensor has been widely used in biomechanics and rehabilitation applications. FBG sensors can even be coated with carbon nanotubes for the biological and chemical sensing applications such as for plantar pressure monitoring [1] and blood pressure measurement [2]. Monitoring of exercise posture is crucial to people's lives. The identification and tracking of human body postures are used to describe the changes in social activities, the coordination of various limbs movement and the changes in muscles during human body movements, which can promote the development of medical, military, and scientific fields to a certain extent [3].
Furthermore, accelerated living styles or accidents can cause damage to the human body. Monitoring and correcting the movement posture on time can protect the human joints [4,5]. It is recorded that about 700,000 people in the United States are spared from stroke each year [6]. There is a pressing need to have an objective assessment of the elbow joint movement to investigate the underlying mechanism [7]. It is the best if the newly developed smart wearable sensors are characterized by the advantages of low cost, quick prototyping, high resolution, and chemical stability.
In recent decades, wearable garments based on flex and FBG sensors have been produced to monitor joint body movement, plantar pressure measurement, and future to identify different postures of body joints in practice, but the developed systems cannot be washed [8,9].
The 3D printing technology is critical in the third industrial revolution, enabling new establishment of multipart symmetrical designs and integration of some selected practical devices into any shape [10,11]; thus, it is going to supply a new approach for the creation of multi-functional end-use devices that can potentially combine optical, biochemical, microelectronic, electromagnetic, wearable, and sound features [12,13]. The recent growing interest has focused manufacturing of smart wearable sensor by using 3D printing technology. The 3D-printing process has started the newly emerging concept of fabrication of 3D models and sensors [14,15]. It has stopped to integrate complex fabrication processes and also to embed sub-components industrialized by traditional methods. Hence, the means of 3D printed sensor or inserting a sensor into a printed shape can be mostly conducted seamlessly [16]. Due to the strong chemical stability and small size, FBG sensor can be successfully embedded into 3D printing structures for a better protection [2,17,18]. 3D printing technique also enables a much more complex shape of sensing element for the encapsulation of FBG sensors [19]. Optical fiber can be printed using a 3D printer for sensing and protection. However, there is a lack of studies combining optical fiber sensors and 3D printing method for monitoring the investigation of the body postures occurred at different body joint positions.
This paper proposed a smart wearable ring fabricated using FBG and 3D printing technologies. FBG sensors were successfully embedded inside printed polylactic acid (PLA) material for sensing tensile deformation that arises from muscle groups. FBG wearable rings were fabricated and calibrated to monitor the elbow and knee joint postures. The wearable smart ring is seamless, not glued, or stitched, and can be easily washed and weared out without sacrificing sensing performance of intenral sensors. This smart ring and the newly proposed fabrication method can be extended for the monitoring studies in different applications such as structural health monitoring in civil engineering areas, aircraft safety monitoring, medical testing without harming human health.
Design and fabrication of FBG-based wearable ring
Sensing principle of FBG sensor
Fiber Bragg grating sensors are often referred to as FBGs, which are one type of fiber optic sensors and have a wide range of applications. Fiber Bragg gratings was first introduced and developed in 1978 and its core refractive index is cyclically changed to complete optical signal transmission [20]. FBG is composed of a sensing portion by changing a required parameter in the fiber core using a laser to cut a small segment of the grating. In the sensing area, there are mainly three kinds of spectra, namely incident light, reflected light, and transmitted light. The light source will first pass through the incident optical fiber and then transfer to the grating to selectively satisfy the light reflection of the central wavelength, forming a narrow segment. The reflected light leaves a wide range of light transmission, so when the temperature or strain of the FBG sensor changes, the amount of communication and the amount of reflection change, and the refractive index also changes. Working principle of the FBG sensor is shown in Figure 1. Wavelength change of a standard single-mode optical fiber against strain Sensing principle of fiber Bragg grating sensor.

Material selection, sensor design, and fabrication
Many plastics and metal powder materials such as acrylonitrile butadiene styrene (ABS), polyvinyl chloride (PVC), polymethyl methacrylate (PMMA), and thermoplastic polyurethane (TPU) are available for 3D printing in the industry. Raw PLA materials can be very flexible so that it can be used for the fabrication of very flexible sensing components and it is hard to test a single bare FBG sensor for monitoring different body posture so that it is embedded with PLA material to get accurate measurement during sensing.
Basic parameters of flexible PLA material in the 3D printing process.
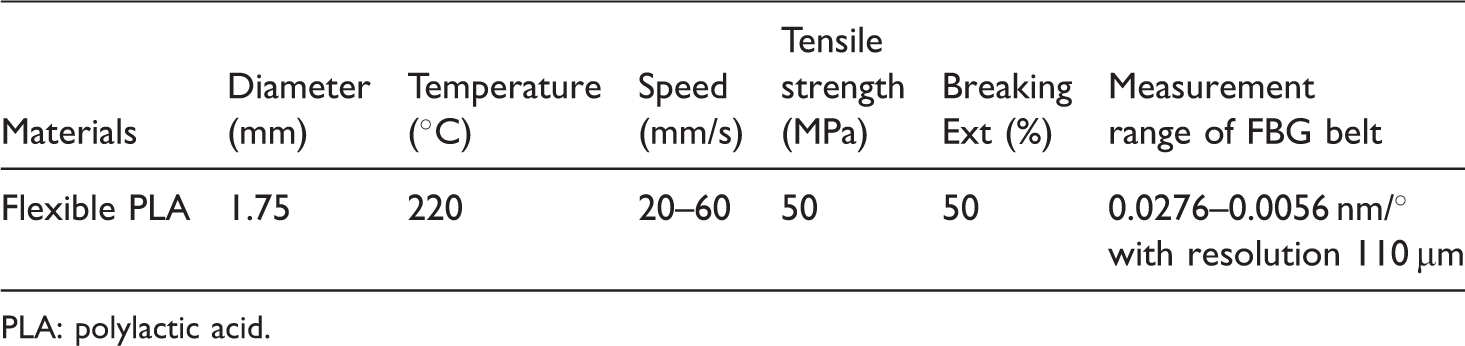
PLA: polylactic acid.
The fabricated belt sensor using 3D printing technology was ring-shaped with an optical fiber Bragg grating sensor embedded inside. Figure 2 presents the necessary procedures of design, fabrication, and testing demonstration of the wearable belt. Model of the wearable belt was first designed using computer program CATIA (Figure 2(a)) and then input into modeling system of the 3D printer (Figure 2(b)). Cross section of this model belt is characterized by a thickness of 2 mm and a height of 4 mm. The model can be printed using different infill patterns (such as line, triangular, rectangular, hexagon) using 3D printing technology. In this study, the line shape was selected as infill pattern with an infill density of 80% (Figure 2(c)). When 50% of the whole belt was successfully fabricated inside 3D printer, a bare FBG sensor characterized by an initial wavelength of 1546.7 nm was mounted at the center of the cross section inside the wearable belt (Figure 2(d)). The glue was used to fix the two ends of the FBG sensor but not the grating section. Afterward, the printing process continues and, finally, a wearable belt was successfully fabricated inside the 3D printer as shown in Figure 2(e). This belt is very flexible and can be mounted at different body positions (Figure 2(f)). The whole belt can also be easily redesigned according to different body size.
Fabrication procedures of an FBG smart belt using a 3D printing method. FBG: fiber Bragg grating.
The FBG sensor was placed at the center of the 3D printed wearable belt, wavelength change of the FBG sensor can be used to indicate the temperature/strain change of PLA material during the printing process. Figure 3 shows a wavelength change of an FBG sensor inside the PLA wearable ring during the printing process. It is noted that the rise and decrease of initial wavelength indicate a related tensile strain (or temperature rise) and compressive strain (or temperature decrease), respectively. The first wavelength presents a fast growth with two peak wavelength values being observed, approaching around 1547.15 nm. The rise of initial wavelength decreases progressively as printing time elapses even with substantial fluctuations occurring during the printing process. The final wavelength becomes stable at the end of printing (around 480 s). The temperature of melted PLA raw material is very high, approaching around 200℃ after extruded outside of printer nozzle. The interaction between melted PLA with FBG leads to a significant initial rise of FBG wavelength (0.6 nm), and the FBG sensor was not affected by rising of temperature during the printing process. As the melted PLA becomes thicker and thicker over the FBG sensor, the thermal influence on the FBG sensors becomes less and less significant. Therefore, the wavelength change becomes stable as time elapses. After the printing is finished at 520 s, the wavelength decreases again, approaching 1546.55 nm at 720 s. This noticeable reduction in wavelength is mainly a result of the significant shrinkage deformation of PLA that occurred after printing work. The mounted FBG sensors successfully capture the physical behavior of PLA material during the printing process. The whole process can be divided into three processes, including (a) initial significant rise in wavelength due to thermal expansion influence of melted PLA on FBG sensors inside 3D printer, (b) the less significant fluctuation of FBG wavelength due to thermal impact during printing process, and (c) the final reduction of FBG wavelength due to substantial shrinkage deformation of hardened PLA material after printing.
Wavelength shift of an FBG sensor during printing inside 3D printed PLA belt. FBG: fiber Bragg grating; PLA: polylactic acid.
Monitoring body joint postures using FBG smart ring
Elbow joint movement monitoring
Sensors fixed in the PLA material and ring structure of the PLA material are tightly mounted on the body joints and hence can ensure the deformation compatibility with human body postures to avoid measurement error (such as due to sliding). A photo of the monitoring system and the connection is shown in Figure 4.
A photo of the monitoring system and connection.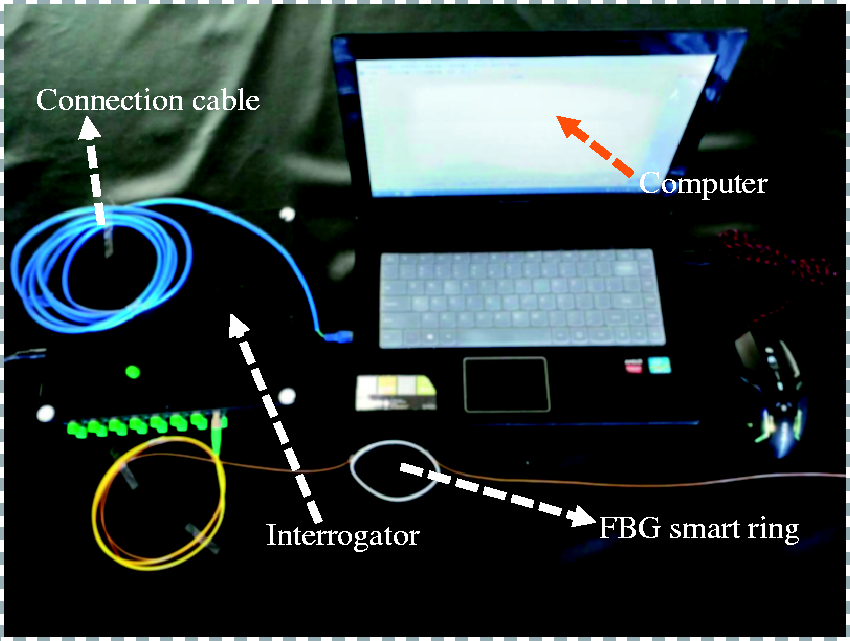
The smart ring was placed about 5 cm away from the elbow joint to sense tensile deformations arise from elbow movement. The proposed monitoring system is characterized by the advantages of high sensitivity, lightweight, high precision, low environmental impact, and high resolution. The new smart ring was mounted at the elbow joint, as shown in Figure 5, to monitor the joint movement. Different bend angles refer to the relative angle between the front arm and horizontal level. The six different photos present different bend angles of the elbow joint (varying at 0°, 15°, 30°, 45°, 60°, 75°, and 90°). Each bend status of the elbow joint was maintained for 15 s in these tests. The total time of elbow posturing reached about 60 s. The relative bent of the elbow joint leads to spread-out deformation of the muscle close to the elbow joint position. Expansion of the muscle further leads to a related tensile strain of the FBG sensor, and hence, the correlation between FBG strain sensor and bend angle of the elbow joint can be established. It is also noted that since the FBG sensor is sensitive to temperature change, the FBG smart ring was mounted for 10 min on the arm of the subject before testing in order to eliminate the thermal influence of body temperature and wearer discomfort on the FBG single change during calibration test. The smart ring is wearable and seamless without slippage.
Different bend states of the elbow joint in measurement tests using FBG smart belt. FBG: fiber Bragg grating.
Figure 6 presents the monitored wavelength variation of FBG sensor embedded in the smart ring at different bend angles, and postural demonstration is shown in Figure 5. The wavelength presents step-by-step rise, increasing from 1535.095 nm to 1535.605 nm. The FBG wavelength values are very stable at each bend angle. The average wavelength change is summarized in Figure 7 to investigate its correlation against bend angle of elbow joint. A clear linear relationship between wavelength change and bend angle is finally obtained after three repeat tests. The maximum bend angle of the elbow joint approached 90°.
Typical relationship of a wavelength change of the smart FBG belt against time for varied angles of elbow joint. FBG: fiber Bragg grating. Relationships of wavelength change against bend angles of elbow joint obtained from three repeat tests.

One additional test was also conducted to examine the measurement performance of the FBG smart ring in a cyclic bending test of the elbow joint. The bend angle in this test is 90° and the measured wavelength values are summarized in Figure 7. A total of six bend angles can be obtained in this figure and the wavelength change is relatively stable. It is noted that the FBG sensor is very small in size (external diameter is smaller than 0.5 mm), light weight, and flexible, so that the sensing section was successfully embedded into PLA material without significantly influencing the mechanical and measurement performance of PLA material. The adopted FDM technology also successfully fused FBG sensor into melted PLA material without using glue or epoxy resin. The flexible FBG sensor will become a whole integration with the hardened PLA material after printing. Measurement sensitivity and minimum resolution of the FBG smart ring mounted at the elbow joint are 0.0056 nm/° and 0.18° (calculated by 0.001 nm/0.0056 nm/° = 0.18°, the minimum resolution of the interrogator is 0.001 nm), respectively. The maximum measurement angle of the FBG smart ring is larger than 90° with a maximum measurement error of 9.5%. Therefore, the FBG smart ring can be used for monitoring the bend angle of the elbow joint by using the wavelength change presented in both Figures 7 and 8.
Wavelength change against the time of FBG smart belt in repeating bend test of the elbow joint. FBG: fiber Bragg grating.
Knee joint movement monitoring
The FBG smart ring was also mounted at the knee joint position to examine its sensing performance. Figure 9 shows the monitored FBG wavelength change of the smart ring mounted at the knee joint in three repeat tests. The bend angle of the knee joint is changed step by step, with an increment of 5° in each level, approaching a maximum of 100° bend angle. It is seen that the wavelength change is linearly proportional to the change of bend angle of the knee joint. This obtained linear relation can be used to compute the bend angle of the knee joint in terms of a wavelength change of FBG sensors. The obtained measurement sensitivity and resolution of the FBG smart ring mounted at the knee joint position are 0.0276 nm/° and 0.39°, respectively. The maximum measurement angle exceeds 100° according to the calibration test data shown in Figure 9.
Monitored FBG wavelength change of the smart ring mounted at the knee joint in three repeat tests. FBG: fiber Bragg grating.
Monitoring tests of the knee joint were conducted by changing velocities of the male subject. Readings of the FBG sensors were continuously collected at a frequency of 30 Hz. Figure 10 shows representative photos of the male subject wearing the FBG smart ring and the obtained wavelength change at the two walking velocities. FBG sensor indicates several peak wavelength values at the two different velocities as shown in Figure 10(a) and (b). Six peak wavelength values and nine wavelength values were observed in Figure 10(c) and (d), respectively. The peak wavelength increment of each FBG sensor is very close in the two series of tests.
(a) The monitored male subject walking at a velocity of 3 km/h, (b) FBG sensor data change against time at walking velocity of 3 km/h, (c) the monitored male subject walking at a velocity of 5 km/h, and the (d) FBG sensor data change against time at walking velocity of 5 km/h. FBG: fiber Bragg grating.
Conclusions
In this paper, an FBG sensor is embedded into a flexible ring which was fabricated using 3D printing technology. This FBG smart ring was successfully calibrated and used for monitoring body joint motions. Main conclusions of this paper are drawn as follows:
The FBG sensor was successfully embedded into 3D printed PLA material. During printing process, the printed PLA raw material leads to cyclic wavelength change of FBG sensors, indicating that the FBG sensors (due to the flexible and small size feature) can be used to investigate physical performance (expansion or shrinkage) of PLA materials during FDM process. Even the printing temperature exceeds 200℃; the FBG sensor can successfully survive the printing process and can be used for sensing different physical parameters. The new FBG smart ring was calibrated for monitoring the bend angles of both elbow joint and knee joint. The relative motion of both the elbow and knee joints can be successfully monitored using FBG smart ring. The obtained wavelength increments were found to vary linearly proportional to the bend angle change of the two joints. Monitoring tests of static test for elbow joint and dynamic tests of knee joint show that measurement sensitivities of the FBG smart rings were 0.0056 nm/° and 0.0276 nm/°, respectively. The maximum measurement angle within current calibration tests were 90° and 100°, respectively.
The current FBG sensor sensitives are only valid for the present male subject in both static and jogging tests just for elbow and knee postures monitoring. In addition, our present study only considered one male subject to perform different body postures due to the limited testing time. However, further tests are required to involve various types of positions such as wrist, elbow, and palm for the general practice of smart wearable ring.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.