
Abstract
In this article, a numerical method to predict textile geometry is derived using a technique based on finite elements (FEs). A geometric modeling package is used to represent an initial geometry of the yarns within the textile. The yarn mid-surface is then represented using plate elements, with the yarn thickness and cross-section being reconstructed from this mid-surface. The bending and tensile aspects of the yarn behavior are represented by separate features of the plate elements and the total energy for the system is minimized. Contacts are modeled using a penalty method, where the contact force is proportional to penetration distance. Once geometry correction has been achieved by solving the FE problem, the geometric model of the textile is corrected to take into account the predicted movements of the yarns. For validation purposes, the method is applied to two-dimensional (2D) and three-dimensional (3D) weaves and compared against images of the real fabrics. Agreement between predictions and images is good for the 3D weave and excellent for the 2D weave.
Keywords
Introduction
In order to perform numerical simulations to predict properties of a textile structure, a description of its geometry is required. The importance of the geometrical accuracy depends largely on the type of simulation (e.g., mechanical, flow, heat transfer, etc.). This article aims to provide a fast method to predict the geometry of a wide variety of textile types as accurately as possible, so that its importance for any given simulation can be determined in future studies.
The principles of finite element (FE) analysis, which underlies the present approach, have been described in numerous texts, notably the definitive works by Zienkiewicz et al. [1,2] and by Bathe [3], and are summarized in a range of shorter texts such those by Becker [4] and Gallagher [5]. There have been several studies on the use of three-dimensional (3D) continuum FEs to model yarns to predict mechanical properties of textiles [6–11]. Some of the issues with using 3D continuum elements are:
Simulations take a long time to perform primarily due to the complexity of the contact algorithm. Simulations require a substantial amount of manual effort to define due to a lack of robustness in the contact algorithm. Bending behavior of yarns cannot be represented accurately with 3D continuum elements [9] due to their highly discontinuous structure.
There have also been numerous studies on the use of analytical techniques to predict fabric geometry and mechanical behavior based on textile mechanics [12–16]. While these techniques are generally robust and fast, they tend to be specific to particular textile architectures and are not easily extended to new textile types. Hivet and Boisse [17] describe a geometric modeling approach which is applied to a variety of two-dimensional (2D) textiles. Although this study relates to the modeling and mechanics of dry textiles, it should be noted that a great deal of work also exists on the mechanics of textile composites (see, for example, the textbook by Bogdanovich and Pastore [18], and the review by Crookston et al. [19]).
The method presented in this article takes ideas from both the analytical and FE textile modeling techniques introduced above, and consists of several stages carried out in sequence:
An initial geometry is defined as one which should contain an accurate description of the yarn interlacement, yarn widths, yarn heights, and a first approximation for the cross-sectional shape, but it need only contain approximate yarn path and yarn twist as these will be predicted by the algorithm. Based upon this geometry, a FE model of the yarns is constructed, representing the yarns via shell FEs placed at their mid-surfaces. The total strain energy from bending, twisting, and tensile deformation is minimized within a simplified FE analysis in order to obtain the true yarn paths. The original yarn geometry is modified to take into account the changes to the yarn paths and cross-sections predicted by the FE model.
This method will be applied to 2D and 3D weaves, and validated against cross-sectional images of these fabrics to assess the accuracy of the method.
Initial geometric modeling and meshing
The topology and approximate geometry of the textile are modeled using the authors' open-source geometrical modeling software package TexGen [9,20]. In its current form, this consists of a library of functions for establishing and manipulating almost any kind of repeating textile geometry; it may be controlled either via a graphical user interface or using an application programming interface. In the present approach, the mid-surfaces of the yarns in the model are extracted by defining the z-direction as perpendicular to the plane of the textile (Figure 1) and finding the surface containing points mid-way between intersections of the upper and lower surfaces of the yarn with arbitrary lines in the z-direction (Figure 2).
Textile unit cell coordinate system. Mid-surface of a single yarn.

The meshing of these surfaces must be done in such a way that pairs of matching nodes (i.e., nodes with matching x–y-coordinates) occur on the mid-surfaces of each pair of yarns which cross (Figure 3), in order to simplify the contact algorithm necessary for the solving stage.
Matching mid-surface meshes of two crossing yarns.
The method used to create such a mesh will be described using a plain weave for illustration purposes (Figure 4). Note that the method is applicable to fabrics, where crimp is not so extreme that any yarn becomes perpendicular (or nearly perpendicular) to the plane of the fabric. An example which challenges but does not violate this rule is presented in ‘3D orthogonal woven textile’ section.
Illustration of the steps taken to create the mid-surface mesh for a plain woven fabric: (a) Textile fabric unit cell, (b) Edges identified (c) Edges projected to the XY-plane, (d) Basic regions identified, (e) Regions meshed in 2D and (f) Mesh projected back to yarn mid-surfaces.
Identifying edges
The objective of this stage is to identify the yarn perimeter when viewed along the z-axis. This is done numerically by identifying a series of edge segments from the triangulated surface within the TexGen model having opposing z-components of their normal directions [9]. Each edge segment in the surface mesh is shared by two triangular facets. If the z-components of the two triangular facets' normals have opposite sign, then they are identified as belonging to the perimeter.
The result of the algorithm applied to the fabric shown in Figure 4(a) is shown in Figure 4(b).
Projecting edges
The edges are projected onto the x–y-plane by setting the z-component of all nodes equal to zero, and the resulting skeletal mesh is simplified by removing duplicate segments, unconnected nodes, etc. At the end of this process, each node should be shared by at least two segments.
Identifying basic regions
From the projected edges, a series of basic regions can be identified along with the encompassing region (Figure 5). A basic region is defined as a region bounded by segments forming a polygon which does not contain any other segments or nodes. The region encompassing the basic region can be distinguished from its constituent basic regions by the different directions of the encompassing edge vectors and hence the opposite sign of the area enclosed; this condition arises because of the nature of the search algorithm used to determine the perimeter.
Identifying basic regions: (a) Basic region and (b) Encompassing region.
Figure 4(d) shows the basic regions identified from the segments in Figure 4(c).
Meshing basic regions
The triangulation of a 2D polygon is a well-established process known as Delaunay refinement [21] and is accomplished here using the third-party library, Triangle [22]. Figure 4(e) shows the basic regions meshed using Triangle given the input shown in Figure 4(d). The resolution of the mesh can be specified at this stage, affecting the accuracy of the solution and the required solution time.
Creating mid-surfaces
The mid-surfaces of each yarn are created by projecting the nodes of each triangular element in the 2D mesh along the z-axis back onto the original 3D surface mesh (Figure 4(a)). If all three projected nodes intersect with the yarn, a mid-surface element is created, where the nodal coordinates are taken as the average of the intersections with the bottom and top surfaces of the yarn. The final mid-surface mesh is shown in Figure 4(f).
FE formulations
The mid-surfaces of the yarns are meshed with FEs to give them structural properties, making it possible to simulate the bending, tensile, and contact forces, typically present in a textile fabric. Using standard techniques, two special elements are formulated to represent the bending and tensile stiffnesses, respectively, while a simple contact algorithm is used to prevent yarn penetration. The bending and tensile elements could have been combined to form a single element, but they were kept separate for convenience. The bending and tensile behaviors of a multifilament tow are uncoupled due to the symmetry of each filament and due to the initially planar nature of each element. This is assumed because the filaments are essentially unconnected and the bending stiffness of the tow is the sum of the filament bending stiffnesses rather than being related to the second moment of area of the tow as a whole. It is important to note that, for simplicity of formulation and computational efficiency, the elements are defined in the plane z = 0, and the tendency for the crimped tows in their out-of-loom state to try to spring back to being straight is modeled via a set of ‘restoring forces’, which are partially opposed by the contact forces which maintain the crimp.
Plate bending element
The plate bending component of the FE model is a simple one drawn from the literature; the concepts, along with the limitations and recommended improvements for this kind of element, are presented in section 12.3 of Ref. [5] and in Ref. [23], though the full definition of the formulation does not appear to have been presented in the current form. A four-noded triangular element with 10 degrees of freedom is formulated, as illustrated in Figure 6. The element has a node at each corner of the triangle each with three degrees of freedom (v, θ
x
, and θ
y
) and a fourth node possessing a single displacement degree of freedom (v) is located at the centroid of the element.
Bending element.
For simplicity, the model only considers out-of-plane (z) displacements due to twisting and transverse deformations of the tows; it does not consider movements in the x–y-plane nor inter tow friction or slippage. Each degree of freedom v represents the displacement of the node in the z-direction and θ
x
and θ
y
represent the change in slope which are defined as



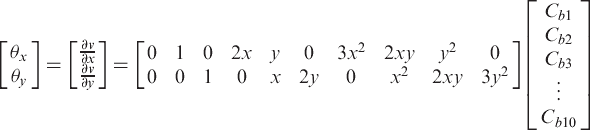
The x- and y-coordinates of the nodes termed (x1, y1), (x2, y2), (x3, y3), and (x4, y4) for nodes 1–4, respectively, are known. Following standard procedures and making use of Equations (3) and (4) for calculating displacement and slope at each node, the degrees of freedom (v1, θ
x
1
, θ
y
1
, v2, θ
x
2
, θ
y
2
, v3, θ
x
3
, θ
y
3
, v4) can be expressed in terms of known nodal coordinates and unknown coefficients [
The bending and twisting strains [κ] ([5], p. 329) can also be expressed in terms of [
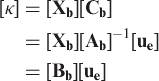



This integration is approximated numerically using Gaussian quadrature in the usual manner [4].
Plate tensile element
These elements are used to model the apparent transverse ‘stiffness’ (generally termed the geometric stiffness; see, for example, p. 383 of Ref. [5]) of a tensioned yarn rather than to model extensional behavior. For this application, a three-noded triangular tensile element is formulated, where each node has one degree of freedom v. For reasons of computational efficiency and numerical stability, linear variation of displacement is assumed, so that tensile stress and strain are constant over each element. This simplification allows the plate bending and tension-dependent stiffness components of the formulation to be separated, as the values of slopes θ
x
and θ
y
used here are calculated when needed from the transverse displacements of the vertex nodes, rather than using the rotational degrees of freedom which exist in the bending model only to enforce continuity of slope. The displacement v is assumed to vary over the element in terms of the following shape function containing linear terms in x and y ([5], p. 215):

The degrees of freedom v1, v2, and v3 can be expressed in terms of known nodal coordinates and unknowns [

The slope of the element [θ] can also be expressed in terms of [ Yarn tension resolved along the z-axis.



Re-arranging and assuming small slope (i.e., sin θ ≈ θ)

In matrix form, this becomes



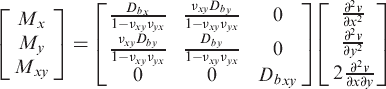
The element geometric stiffness matrix [
Again, this integration is approximated numerically using Gaussian quadrature.
Contact algorithm
Contacts are modeled as modified spring or truss elements with given modulus E connecting two nodes together (Figure 8). The initial rest length L0 of the spring is equal to
Diagram of contact elements.

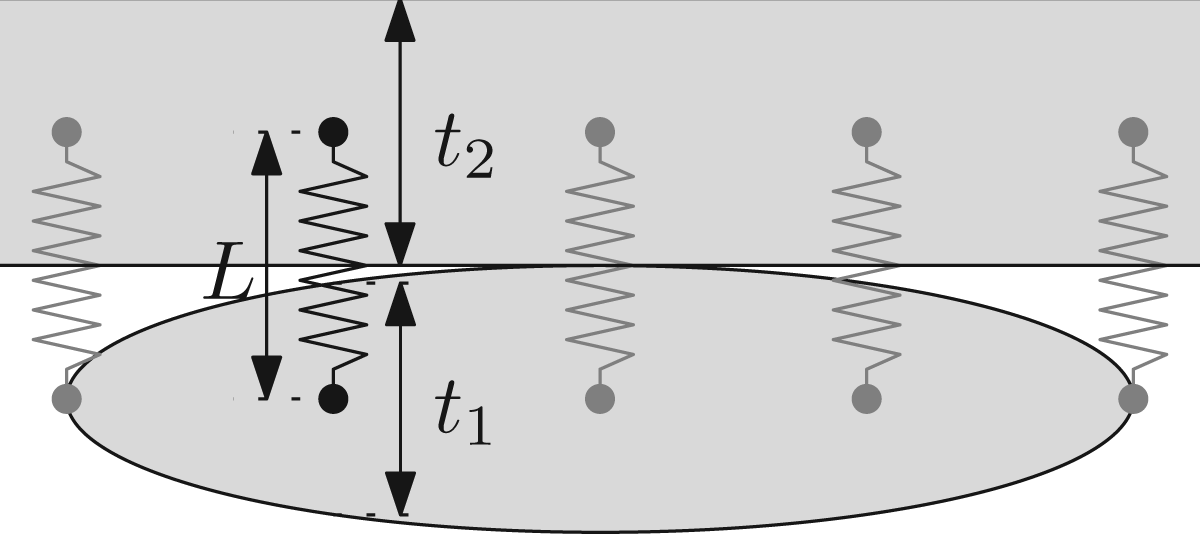
Note that L0 represents the length when the yarns are just touching and is not necessarily equal to the length L when v1 and v2 are zero. The force F opposing the inter yarn penetration exerted by the spring is expressed as


The modulus Ē (not a traditional Young's modulus, and with units of force/length3) can take one of the two values in order to represent the discontinuous nature of contact stiffness at the onset of contact, depending on whether the spring is in compression (L < L0, representing penetration) or tension (L > L0, representing separation). The compressive modulus Ē c is chosen to be large enough to prevent large penetrations. The tensile modulus Ē t is made sufficiently small that its presence does not significantly affect the calculated displacements.
In order to use these equations within an FE formulation, a contact stiffness matrix [

Boundary conditions
Periodic boundary conditions are applied to the model in order to simulate a unit cell within a much larger fabric. There are two pre-conditions for this to be applicable:
The mid-surface mesh must represent a repeatable unit cell The mid-surface mesh must be created such that there is a one-to-one mapping between nodes on opposite sides of the unit cell
The degrees of freedom (v, θ x , and θ y ) of each node lying on the boundary of a unit cell are linked to the degrees of freedom of a corresponding node on the opposite side of the unit cell, so that their values are constrained to be equal.
Solution method
Solution of the problem involves solving a large set of n simultaneous equations which can be represented in matrix form as

The matrix [
The contact elements derived in ‘Contact algorithm’ section are then included by adding the terms in the [
In order to insure that there is a unique solution to the problem and prevent rigid body motion, the displacement degree of freedom x
i
of a node chosen arbitrarily (specifically, the node associated with the first degree of freedom in the system) is constrained to zero, following the usual procedure of modifying row i of the matrices [
An extension of this procedure is followed to constrain the degree of freedom x
i
to be equal to x
j
in applying periodic boundary conditions. Either row i or row j of the matrix [
Due to the fact that the moduli of the contact elements depend on the relative displacements of the nodes, it is necessary to solve the global system of equations iteratively. The procedure is as follows:
Calculate the stiffness ĒA (used within Equation (26)) of the contact elements (used within Equation (26)) using Ē
c
or Ē
t
depending upon the contact conditions and hence upon the current nodal positions. Construct matrices [ Repeat steps 1 and 2 until the modulus of the contact elements has not changed between two successive iterations.
Although there is no theoretical guarantee that this procedure will converge, in practice, it has been found to terminate after a small number of iterations for reasonable values of Ē
c
and Ē
t
.
Adjusting geometry
Once the deformation of the mid-surface mesh has been calculated, it is used to modify the original TexGen [20] geometry. This is achieved in two stages: the yarn centerline is adjusted and then the yarn cross-sections are adjusted.
Yarn centerline
In TexGen, the yarn centerline is represented in terms of the distance along its centerline by a piecewise function 



If the barycentric coordinates λ1, λ2 and λ3 are all non-negative, the point 
A series of displacements v
i
can be calculated for the points P
i
lying on the centerline of the yarn. These displacements can be used as knots to create a new piecewise function 
For simplicity and computational efficiency, the piecewise function
Yarn cross-section
In principle, the cross-section at a given axial position is given as a parametric equation for the locus of points around the cross-section in terms of circumferential parameter v. However, the cross-sectional shape is itself a function of position u along the fiber; so, it is convenient to represent the cross-sectional shape as a parametric equation of the form 
In order to construct the function
Validation
Default values of stiffness parameters used in FE model

Chomarat 800S4-F1
Chomarat 800S4-F1 is a glass fiber 4 harness satin woven fabric with fabric properties given in Table 2. A geometric model of this fabric was created in TexGen with elliptical yarns, and the geometric solution method described in this article was applied to it. Figure 9 illustrates the fabric before and after solving with the default parameters and a mesh seed size (i.e., target length of element edges) of 0.5 mm.
Chomarat 800S4-F1 before and after geometry solving using default parameters: (a) Before and (b) After. Geometric properties of Chomarat 800S4-F1 fabric

The default parameters give a good initial solution. However, in order to gain a better understanding of the effect of these parameters, a parametric study was performed.
Mesh sensitivity.
The density of the mesh will invariably affect the solution; however, results should converge as the mesh density increases. The cross-sectional geometry varying the mesh seed size is shown in Figure 10.
Chomarat 800S4-F1 cross-sections varying mesh density: (a) Speed = 2.0 mm, nodes = 205, elements = 327, and time = 15 s, (b) Speed = 1.0 mm, nodes = 620, elements = 1072, and time = 32 s, (c) Speed = 0.5 mm, nodes = 2211, elements = 4250, and time = 4 m 35 s, and (d) Speed = 0.35 mm, nodes = 4414, elements = 8890, and time = 21 m 46 s.
It can be seen that the intersections between the yarns are fairly large in Figure 10(a) which is caused by the low mesh density. As the mesh density increases, these intersections get smaller. Figure 10(c) and (d) are very similar, indicating that the solution has converged. A seed size of 0.5 is chosen for all further calculations.
Mechanical property sensitivity.
The calculations performed require some mechanical properties as input. Specifically, the yarn bending moduli Db1 and Db2, yarn twisting modulus Db12, and yarn tensile force per unit width σ1 are required. However, only the values relative to each other are of importance to the geometry calculated. More specifically, it has been found by experience that (for example) doubling or halving these factors leads to only small changes in the predicted geometries; so, the values used in the present predictions are the ones which typically lead to plausible shapes. It should also be noted that the values chosen, inherently compensate for the known tendency of the present flexural element formulation to perform over-flexibly [23]. The following parametric study, therefore, concentrates on assessing the presence or absence of particular terms rather than quantifying the weak sensitivities to exact numerical values. Figure 11 illustrates the changes in geometry due to choice of alternative values of 0 and 1 for each value of Db1, Db2, and σ1.
Chomarat 800S4-F1 cross-sections varying mechanical properties. (a) Db1 = 1.0, Db2 = 1.0, and σ1 = 1.0, (b) Db1 = 1.0, Db2 = 1.0, and σ1 = 0.0, (c) Db1 = 1.0, Db2 = 0.0, and σ1 = 1.0, (d) Db1 = 1.0, Db2 = 0.0, and σ1 = 0.0, (e) Db1 = 0.0, Db2 = 1.0, and σ1 = 1.0, and (f) Db1 = 0.0, Db2 = 1.0, and σ1 = 0.0.
In Figure 11(a), all bending and tensile contributions are enabled. When the tensile contribution is disabled, there is little to keep the yarns tightly packed together (Figure 11(b)). When the transverse bending modulus is disabled, the yarns deform considerably in the transverse direction (Figure 11(c) and (d)). With the longitudinal bending modulus disabled, the longitudinal smoothness of the yarn is largely retained if there is yarn tension (Figure 11(e)), but is lost when there is no yarn tension (Figure 11(f)). In summary, this study confirms that longitudinal stiffness and yarn tension encourage yarn path smoothness; yarn tension serves to enforce compaction between layers, and yarn transverse stiffness is necessary to preserve plausible yarn cross-sections. Best results are obtained when all contributions are enabled.
Micro-computed tomography comparison.
The fabric was scanned using a Micro-CT (CT, computed tomography) scanner and cross-sections from the Micro-CT volumetric data were extracted for comparison [9]. Figures 12 and 13 show a comparison of cross-sections taken along the center of a yarn and cross-sections taken between two yarns, respectively.
Chomarat 800S4-F1 cross-sections along yarn center. Best-fit ellipses and splines are overlaid on the Micro-CT image: (a) TexGen before, (b) TexGen after, and (c) Micro-CT.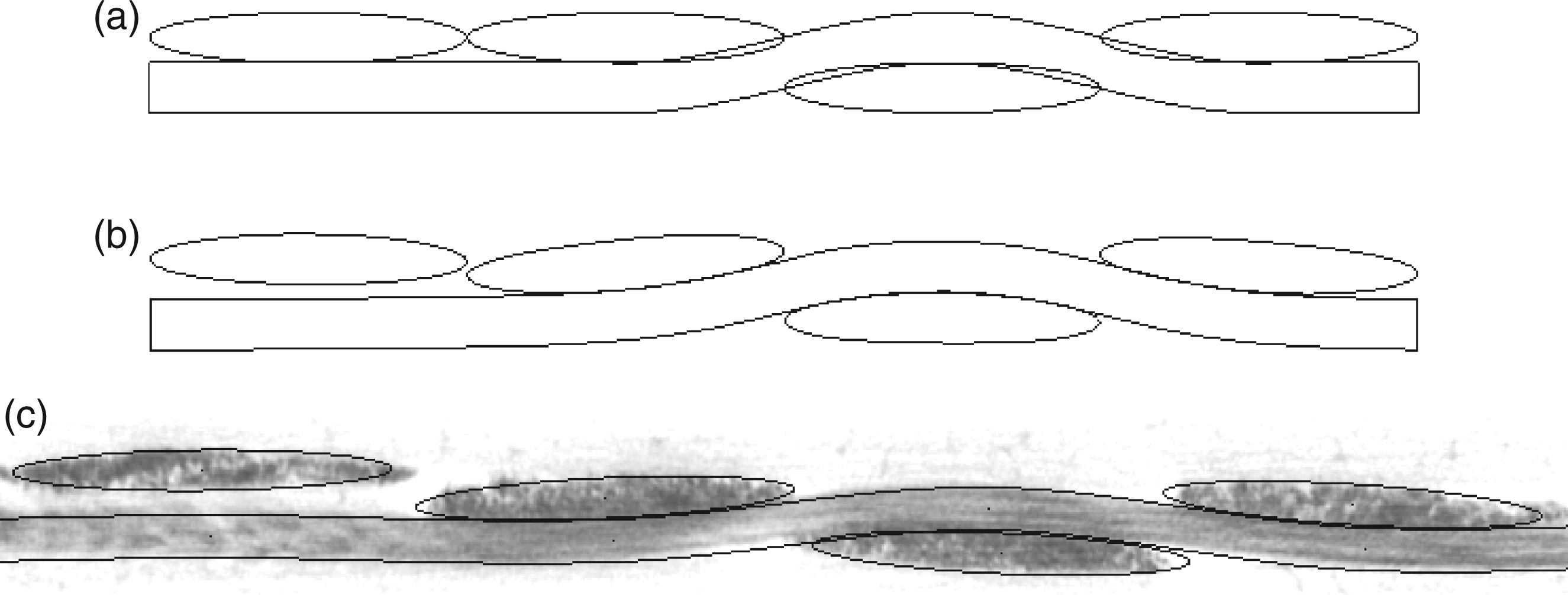
From these figures, it can be seen that geometry solver is able to predict the twist and position of the yarns for this fabric without the need for measured yarn mechanical property data. Specifically, it can be seen that the inter yarn penetration visible in Figure 12(a) between the longitudinally sectioned yarn and the rightmost three transversely-sectioned yarns is avoided by a combination of vertical translation and rotation of two of them, along with smoothing of the path of the longitudinally sectioned yarn to conform more closely with the lenticular cross-section of the yarns around which it deforms (Figure 12(b)). The resulting corrected shapes closely match the outlines visible in the Micro-CT image (Figure 12(c)). A clear contrast between initial and corrected yarn positions and shapes is also visible in Figure 13(a) and (b), along with good agreement between the latter and the Micro-CT measurements in Figure 13(c), though the mechanisms underlying these movements are less obvious as the contact zones are not visible.
Chomarat 800S4-F1 cross-sections between yarns: (a) TexGen before, (b) TexGen after, and (c) Micro-CT.
3D orthogonal woven textile
A geometric model of a 3D orthogonal woven textile fabric (i.e., one involving multiple sets of stacked warp and fill yarns and an additional warp yarn running approximately perpendicular to act as a binder) was created in TexGen from the description given by Tan [28] (Table 3)
||
and the geometric solving method described above was applied. Figure 14 illustrates the fabric before and after solving with the default parameters. Due to the geometric complexity of the model, this took 50-minutes to solve over 18 iterations with a seed size of 0.5, 3609 nodes, and 5612 elements. A straightening of the weft yarns can be observed where the initial model contained excessive crimp. The path of the binder
¶
yarns have become smoother and the weft yarns twisted to accomodate this smoother path.
3D orthogonal woven textile before and after geometry solving: (a) Before and (b) After. Geometric properties of 3D woven textile

Micrograph comparison.
Figure 15 shows a comparison of predicted cross-sections taken along the center of a yarn with the corresponding micrographs.
3D orthogonal woven textile cross-sections along yarn center: (a) TexGen before, (b) TexGen after, and (c) Micrograph reprinted from Tan [28], ©2000, with permission from Elsevier.
While the predicted and actual cross-sections do not show excellent agreement that was exhibited by the 2D test case, the mechanism in which the binder yarn path is smoothed by rotating the weft yarns is demonstrated both in the prediction and the micrograph. Intersections can be seen between the weft yarns similar to those seen in Figure 10(a); this spurious effect could be reduced by increasing the mesh density at the cost of increasing the computation time. The weft yarns on the opposite face to those directly rotated by the binders show much more rotation in the prediction than in the micrograph, suggesting that the twisting stiffness may be too large and may hence cause predicted bodily rotation of these yarns rather than local twisting to accommodate the binders.
This particular fabric illustrates the limitations of this technique. Throughout the derivation, a number of assumptions have been made which reduce its effectiveness for modeling fabrics with yarns, whose direction approaches the z-axis:
At the meshing stage, undesirable mesh distortions can occur. A high-quality mesh in 2D can become distorted when projected to the mid-surface of a yarn with a large slope. The element will be scaled in the direction of the slope by a factor of cos(θ)−1, where θ is the slope angle. In the element formulations, small slopes are assumed (i.e., sin θ ≈ θ) for reduced computation time and increased stability. At the solving stage, the nodes do not have x- and y-displacement components and thus, displacements are restricted to the z-axis alone.
It is postulated that these limitations explain why the geometrical prediction for this 3D orthogonal weave is not as good as for the 2D weave.
Conclusions
A method for predicting the geometry of textile fabrics is presented using a FE technique. This article describes all the stages involved, including mesh generation, element formulation, contact algorithm, and solving. This has all been implemented in the TexGen software [20], providing an automated procedure.
Compared to analytical methods, this method is more generic and can be applied to different fabric architectures without modifications.
Compared to FE methods using volume elements, this method takes less computational time to solve and does not suffer from the inherent inability to accurately model the bending behavior of the discontinuous yarns using continuum elements.
Validation for two fabrics has been performed including a 2D weave and a 3D weave. Results for the 2D weave have been shown to compare very well to experimental data. Results for the 3D weave were predictably not so good due to the high level of crimp present in the binder yarn, but these were still an improvement over a purely geometric model.
Footnotes
†
These properties are typically difficult to obtain experimentally from single-yarn tests; so, assumed values must be generally used.
§
In this case, [
||
Due to problems with the slope of the binder yarn becoming too steep, the spacing between yarns was increased to 1.5 mm in TexGen where the binder yarns goes through the thickness of the fabric.
¶
The binder yarn is a yarn which keeps the layers in a 3D woven fabric together.
Acknowledgments
The authors gratefully acknowledge the support of EPSRC for this project via the Nottingham Innovative Manufacturing Research Centre, grant no. EP/E001904/1, and via the Platform Grant: Textile Composites - Engineering Science and its Applications, grant no. EP/F02911X/1. Some of the study contained in this article was originally presented verbally and electronically at a conference on 3D textiles [![]() ].
].