
Abstract
In many problems from the field of textile engineering (e.g. fabric folding, motion of the sewing thread), it is necessary to investigate the motion of the objects in dynamic conditions, taking into consideration the influence of the forces of inertia and changing in the time boundary conditions. This article deals with the model analysis of the motion of the flat textile structure using Lagrange’s equations with constraints. The motion of the objects is under the influence of the gravity force. Lagrange’s equations have been used for discrete model of the structure. Numerical considerations presented in this article should give answer about practical usefulness of the Lagrange’s equations for solving the dynamic problem.
Introduction
Modelling and simulation of cloth deformation are of great importance in computer graphics and engineering applications. Although many models have been developed, problems still exist. No model so far can accurately describe both motion and deformation of cloth in a unified equation. And the equations for the in-plane deformation of cloth are yet to be developed. Cloth draping is of particular interest in the field of garment engineering. Most cloth draping simulation stresses the visual effects of garment design. However, the accuracy of the draping effect should not be overlooked, particularly for garment manufacturing. The accuracy of the draping behavior is largely affected by the fabric properties. Goldenthal [1], in his work, describes the dynamical behavior of textile structure using the Lagrange’s equations. In this work, the equations of motions are obtained from the Euler Lagrange equations. Next, he uses the Constrained Lagrangian Mechanics (CLM) framework to introduce constraints into the dynamic system. In order to do it, Lagrange multipliers have been introduced. Karthikeyan and Rnaganatan in their tutorial [2] on cloth modeling use the Lagrange’s equations of motion to describe the model of cloth. The Lagrange’s equations are fundamental equations of kinematics, which can be used to determine equilibrium position when the energy of a body is known.
Many textiles do not noticeably stretch under their own weight. Unfortunately, for better performance, many cloth solvers disregard this fact. Goldenthal and the others [3] propose a method to obtain very low strain along the warp and weft direction using CLM and a novel fast projection method. The numerical integration algorithm for constrained dynamics has been developed directly from the augmented Lagrange’s equation. The resulting algorithm acts as a velocity filter that easily integrates into existing simulation code. Au et al. [4] discuss the issue of incorporating the fabric properties into the cloth model, so that its raping behavior can be realistically simulated. These fabric properties are expressed in terms of a set of measurable mechanical properties. The draping behavior of the cloth is derived based on elastic theory. Dynamic draping simulation is presented with illustrative examples. You et al. [5] in their work describe a model for both motion and deformation of cloth, which will account for the in-plane deformation of cloth. In this model, the cloth deformations under out-plane and in-plane loads were uncoupled into out-plane and in-pane deformations. The theory of small deflection bending of plates with elastic behaviors was applied to the out-plane deformation and the theory of plane stress of elastic objects was applied to the in-plane deformation. Both static and dynamic problems of cloth were taken into account. The basic governing equations were given and the corresponding finite difference formulae were developed. The models developed from the energy minimization and finite element methods only considered the deformation of cloth. In the models developed from Lagrange’s equations of motion, both motion and deformation of the cloth are taken into account. Terzopoulos and Fleischer [6] proposed a deformable surface to model a piece of cloth based on Lagrange’s equation of motion. The derivation concentrated on the balance of forces: inertial force, damping force, other external forces, and the internal elastic and bending force acting on cloth.
In this article, only the theoretical considerations about using the Lagrange’s equations for simulation of motion of longitudinal section of textile were carried out.
In most cases of dynamic analysis of textile structures, it is necessary to use the model of heavy elastica, as a one-dimensional body of linear weight q and bending rigidity C in the state of large deflections. In this article, it is assumed that during the run of bending effect, the flat textile structure (e.g. fabric) will be represented as its longitudinal section. The mathematical model will be described as a flat deflection curve; this will be treated as a heavy elastica, as shown in Figure 1 and in ref. 7.
The model of fabric approximate to elastic.
The word ‘heavy’ underlines the decisive influence of the gravity forces during the motion. It is assumed that the particular longitudinal sections do not act on each other by internal forces. Furthermore, the constancy of properties along the whole width of the bending strip is assumed. It will be assumed also that the elastica is inextensible. The analysis was made using Lagrange’s equations, describing the motion of the system of n particles in conservative force field. The variant of Lagrange’s equations with constraints was considered.
Discrete model of the object and the Lagrange’s equations
The Lagrange’s equations, describing the motion of the system of n particles in conservative force field, studying in detail among other things in the refs 8–11, are presented below

The problem reduces to appropriate choosing of generalized coordinates
During the analysis, we often replace continuous systems by discrete systems using partition into n elements. In considered problem partition was made as follows.
The elastica of length L, mass M, and bending rigidity C fixed at point A was replaced by system of n masses of identical value Discrete model in coordinate system.
Coordinates of i-th mass and its derivatives are as below

The kinetic energy of i-th mass is
Therefore, the total kinetic energy of the system of n mass is

The total potential energy of the system U is the sum of the two components

The potential energy of gravity forces is 
Thus, the total potential energy of the system U is

The formula for derivative of kinetic energy T in respect of 
After changing the limits of summation, we can write

Similarly, the other derivatives can be written as follows



The derivative 
Using summation from i = 1 to i = n – 1, the Equation (11) can be written as follows

Therefore, the derivative of total potential energy in respect of 
Using the Equations (8), (9), and (14) in Lagrange’s equations (1), and dividing by 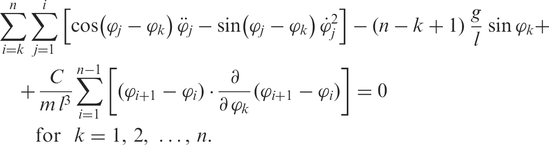
In this way, we get the system of n 2nd order ordinary differential equations with unknown variables
Interpretation of boundary conditions results from formula for total potential energy of the system, as shown in Equation (6). In presented problem, the end B of elastica is free, therefore it is not loaded by any forces. The end A is fixed by joint, therefore the bending moment
The Lagrange’s equations in the matrix form
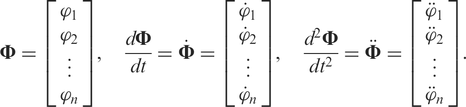
For further analysis, the Lagrange’s equations (15) were written in the matrix form. The following denotations were introduced
In the matrix form, the Lagrange’s equations (15) are

On the basis of the Equations (15), we can write the matrix 

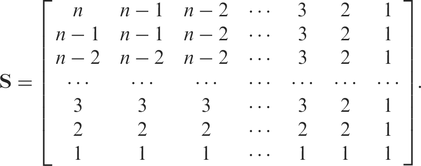
The element of k-th row and j-th column of matrix

Its task is to realize the double summation from
Finally, it was obtained from system of n 2nd order ordinary differential equations with unknown generalized coordinates 
Numerical solution of the problem
The system of Equation (17) we can write in the form of system 2n 1st order ordinary differential equations, introducing additional vector of generalized velocities 
The system of Equation (18) has been solved using a standard Runge-Kutta-Fehlberg 4th order integration method. To solve this problem numerically, the following denotations were introduced
The vector of unknowns:


The right side of Equation (17) has been denoted by vector
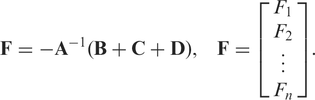
Finally, the following system of differential equations was solving


The Lagrange’s equations with two constraints
Previously the elastica fixed only at point A was considered. The other end B of elastica was free (Figure 2). In this case, generalized coordinates
The motion of elastica with two ends fixed at two points A and B using joints as in Figure 3 will be considered. This case may be used for example to simulate fabric folding etc. Then, the boundary conditions for the end B (which previously was free) are as follows
The elastica with two ends fixed at points A and B.

In accordance with Equation (2) for 
Thus, the Lagrange’s equations we can write in the following form

Derivatives 
Let right side of the k-th Equation (15) be denoted by 
Using matrix notation, we can write new matrix form of the system (25)



The system of Equation (26) with the Equations (22) presents the system of n + 2 differential-algebraic equations with n + 2 unknowns, that is: n generalized coordinates 
Next from Equations (26), the multipliers 







The system of Equations (28) has been transformed to the form

Next, we can write

Finally, the system of Equations (30) has been solved using a standard Runge-Kutta-Fehlberg 4th order integration method.
The considerations presented above are concerned with the elastica for which the end B was fixed by joint. Of course, the other conditions of constraints may be introduced for this one.
If we want to allow vertical motion of the end B, then we have only one constraint for coordinate x of the end B: x must be always equal to value
The Lagrange’s equations are simple in this case because we have only one Lagrange’s multipliers
If we want to have the end B fixed at point B at an angle of 
The results of calculations
To present the results of calculations and accuracy of numerical method, two numerical cases were considered.
The first case concerns the problem of motion of heavy elastica under the influence of gravity force. The elastica is fixed at one end only, as shown in Figure 2.
The second case concerns the problem of motion of elastica fixed at two ends, as shown in Figure 3.
The motion of the elastica fixed at one point
In this case, the elastica fixed at one point by joint as in Figure 2 will be considered. The second end is free. The motion is under the influence of the gravity and elastic forces.
The properties of the elastica are as follows:
– bending rigidity C = 0.0025
– linear mass density ρ = 0.01 kg/m,
– length L = 1 m.
To many points n of division can affect to long time of calculations. In the example below, it has been assumed that n = 8.
The initial conditions (20) are as follows

In the initial instant, the elastica has rectilinear, horizontal shape. The velocity of all points is zero. After solving the Equations (18) with the time step The variation of generalized coordinates The variation of generalized coordinates The shape of elastica in the following time instant from 


In the Figures 5 and 6, the heavy dashed line represents graph of angular displacement of rigid rod (physical pendulum) fixed in the same point as elastica (Figure 7).
The rigid rod as physical pendulum.
From the graphs it may be inferred that in the initial state of the motion, the points of elastica oscillate around the dynamic equilibrium (as for physical pendulum). The rigid rod (Figure 7) can be treated as the elastica of bending rigidity
In order to check accuracy of calculations, we follow as below.
For chosen coordinate
The calculations have been made for C = 0.0025 Test of accuracy of generalized coordinate 
The differences
The motion of the elastica fixed at two points
In this case, the elastica fixed at two points by joints as in Figure 3 will be considered. The motion is under the influence of the gravity and elastic forces.
The properties of the elastica are as follows:
– bending rigidity C = 0.0015
– linear mass density ρ = 0.01 kg/m,
– length L = 1.2 m.
Number of points of division is n = 16. The system of equations (30) has been solved using Runge-Kutta-Fehlberg 4th order integration method with time step 
Finally, the shape of the elastica in the following time instant The shape of the elastica in the following time instant.
In order to check accuracy of calculations, we tested how the boundary conditions (21) change as time goes by. In this way, we can check how the algorithm secures fulfillment of the boundary conditions
As a measure of deviation of boundary conditions, we can take The analysis of fulfillment of the boundary conditions 
From the Figure 10, we can conclude that for two times less time step deviation of boundary conditions was significantly less. For
Conclusion
After carrying out series of numerical tests it can be concluded that Lagrange’s equations are practically useful for the analysis of the motion of heavy elastica. This is one way to solve the problem presented in this article. The Lagrange’s equations are the tool to get the solutions. In this case, the Lagrange’s equations are useful. The speed of calculations and time to get results are satisfying. Of course, the other methods may be useful as well. The intention of the author of this article was only using of Lagrange’s equations.
The method can be used for simulation of many problems from the field of textile mechanics, for example fabric folding (Figure 11), motion of the sewing thread etc. Similar investigations, but not using Lagrange’s equations, have been described by Lloyd [13].
The simulation of fabric folding using Lagrange’s equations.
The results of calculations show clearly wave nature of phenomenon. The bending rigidity has no influence on the convergence of the results. The analyzed motion of elastica is stable owing to initial conditions. The applications field of Lagrange’s equations is not closed yet. In the future works, the method presented in this article will be applied for simulation of new test of bending length based on fabric folding. Numerical simulation should give answer about practical usefulness of this test.
Footnotes
Notes