
Abstract
This study introduces a novel approach to analyzing a four-degree-of-freedom (DoF) nonlinear system by leveraging advanced numerical and analytical techniques to comprehensively examine its dynamic behavior. The system’s nonlinear differential equations (DEs) are obtained through the application of Lagrange’s equations (LE). The solutions are obtained using the fourth-order Runge–Kutta method (4-RKM). The investigation involves analyzing the relationships between the angular solutions and their corresponding first-order derivatives, commonly referred to as phase plane analysis. The study aims to examine bifurcation diagrams and Lyapunov exponent spectra to reveal the various modes of motion within the system and visualize Poincaré maps. These tools are used to analyze a unique system configuration. Lastly, the conditions for solvability and the characteristic exponents are identified by examining resonance scenarios. The examination of resonance scenarios through characteristic exponents and solvability conditions, coupled with the application of Routh-Hurwitz criteria (RHC) for stability evaluation, provides an innovative framework for understanding frequency response and nonlinear stability across stable and unstable ranges. By exploring both theoretical and practical aspects of vibrational dynamics in applications like aviation, robotics, and underwater exploration, this work offers a significant advancement in analyzing complex systems, with wide-ranging implications for various engineering fields, including aerospace, structural mechanics, and energy harvesting.
Keywords
Introduction
Vibration analysis is a fundamental aspect of engineering and applied sciences, playing a crucial role in understanding the dynamic behavior of mechanical and structural systems subjected to external forces or excitations. From bridges and buildings to aircraft and automotive components, the study of vibrations is indispensable for ensuring structural integrity, optimizing performance, and enhancing safety across various engineering disciplines. The solution of vibration systems typically involves determining dynamic responses, mode shapes, and natural frequencies under different loading circumstances. Analytical methods, such as modal analysis and the method of undetermined coefficients, offer valuable insights into the fundamental behavior of vibrating systems and are widely used for preliminary design and analysis. However, for systems with complex geometries, material properties, or loading conditions, analytical solutions may be challenging or impractical to obtain. Numerical techniques offer a versatile and efficient alternative for vibrating systems, allowing for the accurate simulation and analysis of complex systems with arbitrary geometries and boundary conditions. Techniques such as the finite element method (FEM), finite difference method (FDM), and boundary element method (BEM) enable engineers and researchers to discretize and solve the governing equations of motion, providing detailed insights into the vibrational behavior of structures and components. An introduction to the numerical techniques used for solving ordinary DEs is provided in Ref. 1, including detailed discussions on the Euler method, 4-RKM, and multistep method, along with their theoretical underpinnings and practical applications. In Ref. 2, a wide range of topics in scientific computing, including numerical solutions of ordinary DEs and partial DEs, are introduced. It emphasizes practical implementation, providing a balanced approach to theory and application with numerous examples and exercises. A practical guide to numerical techniques for scientists and engineers, with an emphasis on using MATLAB for implementation, is presented in Ref. 3. It covers ordinary DEs, partial DEs, systems of equations, numerical optimization, and eigenvalue problems, focusing on algorithm development and practical applications.
The study of complex dynamical systems has been greatly influenced by the pioneering work of mathematicians Aleksandr Mikhailovich Lyapunov and Henri Poincaré, whose insights laid the foundation for modern nonlinear dynamics. Furthermore, the concept of bifurcation has emerged as a central theme in understanding the qualitative changes in system behavior. Lyapunov made significant contributions to stability theory through his seminal work on Lyapunov functions and stability analysis. His groundbreaking monograph established the framework for assessing the stability of equilibrium points in dynamical systems. Lyapunov’s stability theory, based on the concept of Lyapunov exponents and functions, has found widespread applications in fields such as control theory, celestial mechanics, and population dynamics. 4 Poincaré made fundamental contributions to the understanding of chaotic behavior in dynamical systems. His investigations into the three-body problem in celestial mechanics revealed the existence of chaotic orbits and sensitive dependence on initial conditions, anticipating the modern concept of chaos theory. 5
Bifurcation theory, originating from the works of mathematicians such as Andronov, Pontryagin, and Poincaré, focuses on the qualitative changes in the behavior of dynamical systems as control parameters vary. Bifurcations represent critical points where the system undergoes a qualitative transition, giving rise to new dynamical regimes such as periodic orbits, chaos, or multiple stable states. Understanding bifurcation phenomena is essential for predicting and controlling the behavior of complex systems in diverse scientific domains, including physics, engineering, ecology, and economics. 6 The authors introduce the concept of strange attractors and analyze the behavior of nonlinear dynamical systems, particularly in the context of turbulence. They discuss the role of bifurcations in determining the transitions between different dynamical regimes and propose methods for characterizing chaotic behavior. 7 The discovery of deterministic chaos in a simple model of atmospheric convection is presented in Ref. 8. He discusses the emergence of chaotic behavior through bifurcations and highlights the sensitivity to initial conditions, which has profound implications for weather forecasting and climate science. May explores the dynamics of simple ecological models and demonstrates how they can exhibit complex behavior, including bifurcations, oscillations, and chaos. He discusses the implications of these findings for understanding population dynamics, biodiversity, and ecological stability. 9 The stability of predator-prey systems using graphical methods and Lyapunov stability theory is analyzed in Ref. 10. The authors provide graphical representations of stability regions and discuss the conditions under which predator-prey interactions lead to stable or oscillatory dynamics. The application of Lyapunov distribution patterns is crucial for investigating stability and chaos in dynamic systems, especially those integrating energy harvesting (EH) devices. EH systems encounter the challenge of enhancing device performance and efficiency in the face of fluctuating and unpredictable environmental conditions. Through the utilization of Lyapunov distribution patterns, one can identify areas of stability, periodic behavior, and chaos within these systems. 11 An analytical scheme designed to analyze the stability of a 4DoF mechanical system under friction-induced vibrations is introduced in Ref. 12. The study investigates the dynamic behavior of such systems by considering the impact of friction on stability. Utilizing analytical methods such as (LE) and stability analysis techniques, the research explores how friction affects the system’s stability boundaries. Through extensive numerical simulations and analytical derivations, the study identifies critical stability thresholds and regions susceptible to instability. The findings offer valuable insights into understanding the stability characteristics of 4DoF mechanical systems subjected to friction-induced vibrations, with implications for diverse engineering applications, including machinery, robotics, and automotive systems. The bifurcations and stability of high-frequency periodic motions with limited amplitude, along with the associated stability criteria, are also addressed. Recent studies in Refs. 13 and 14 investigate the stability of unstretched double and triple pendulums subjected to external harmonic moments and forces. The stability and instability regions for various frequency response parameters are determined.
The bifurcation and chaotic behaviors in a Duffing oscillator are examined in Ref. 15 using Poincaré maps and bifurcation diagrams. It also explores methods for controlling chaotic dynamics. Whereas the nonlinear dynamics in rotor systems, focusing on bifurcation behavior and chaos, is investigated in Ref. 16. The Poincaré maps are used to analyze transitions between periodic and chaotic regimes. In Ref. 17, the vibrational dynamics and stability of a planar double pendulum, particularly near resonance conditions is explored. Furthermore, the authors investigated the nonlinear behaviors, stability regimes, and resonance phenomena, making it relevant for mechanical systems with complex dynamic interactions. A nonlinear dynamical system incorporating a piezoelectric transducer is analyzed in Ref. 18. The coupling effects of damping and piezoelectric interactions, offering insights into energy harvesting and system optimization, are emphasized. In Ref. 19, the authors investigated a 2DOF system with piezoelectric devices and feedback control. Stability, bifurcation behaviors, and feedback mechanisms are provided to improve control and performance. The chaotic and stable dynamics of the Duffing oscillator under sinusoidal excitation are delved into Ref. 20. The bifurcation, stability limits, and chaotic transitions in nonlinear oscillators are explored. The presented work in Ref. 21 investigates coupled damped oscillators integrated with a piezoelectric energy harvester. The study examines bifurcation, stability, and dynamics, aiming to optimize energy harvesting and dynamic performance. These works contribute significantly to understanding nonlinear dynamics, stability, and energy systems across diverse engineering fields, such as robotics, vibration control, and energy harvesting.
The research outlined in this paper delves into the dynamics of a 4DoF system. The nonlinear DEs governing this system are deduced through the application of LE. Numerical solutions are then obtained utilizing the 4-RKM. The inquiry entails scrutinizing the connections between angular solutions and their respective first-order derivatives, a process commonly known as phase plane analysis. The objective is to analysis the bifurcation diagrams and Lyapunov exponent spectra to unveil the diverse modes of motion within the system and depict Poincaré maps. The RHC are applied to evaluate the stability and instability domains, followed by an analysis of the steady-state solutions. The outcomes of this research are applicable to disciplines like construction and structural design, vehicle dynamics, industrial machinery, seismic impact mitigation, and renewable energy harvesting.
Overview of the problem
We have a hollow block with a mass Illustrates the vibrating system.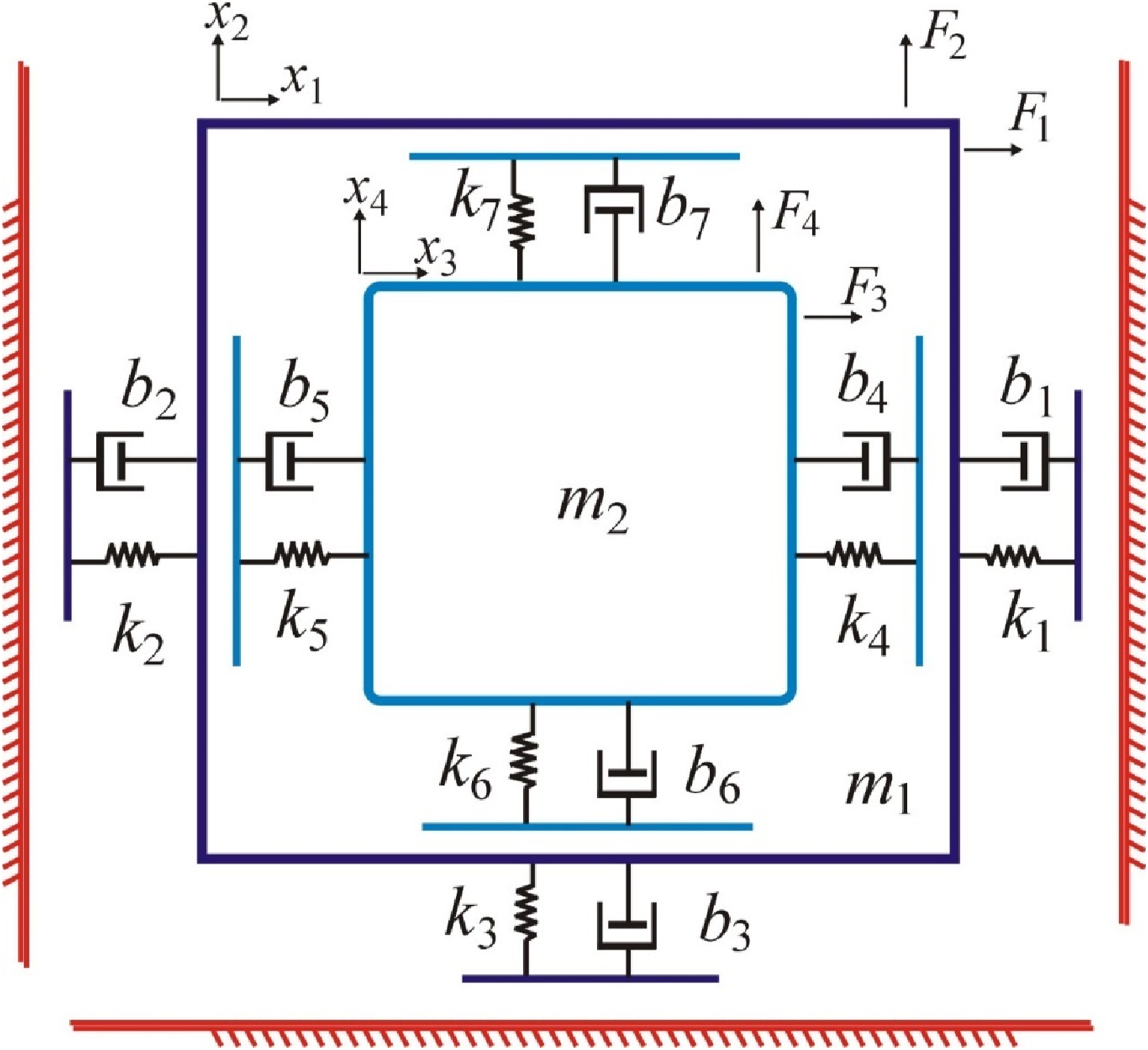
We have defined the kinetic and potential energies in the following manner:

The derivation of the equations of motion (EOM) for the described system utilizing the Lagrangian



In order to streamline the system analysis, we introduce dimensionless variations of the system parameters.
Inserting formula (4) in the equations (1)–(3) to derive the dimensionless forms of the equations of motion (EOM).




Numerical analysis
The primary goal of the 4-RKM is to approximate the solution of an initial value problem for an ordinary differential equation, where an equation describes how a function changes with respect to an independent variable. These problems commonly arise in various scientific and engineering fields, including physics, biology, chemistry, and engineering. By analyzing the shape and direction of trajectories, we can infer important properties such as stability, and oscillatory behavior. Now, we have to transform equations (5)–(8) into a system of first-order equations. Introduce a new variable

The numerical solution of the system presented in equation (9) has been computed and visually represented in Figures 2 and 3, utilizing the provided parameter values. Demonstrates how changes in Illustrates the impact of alterations in 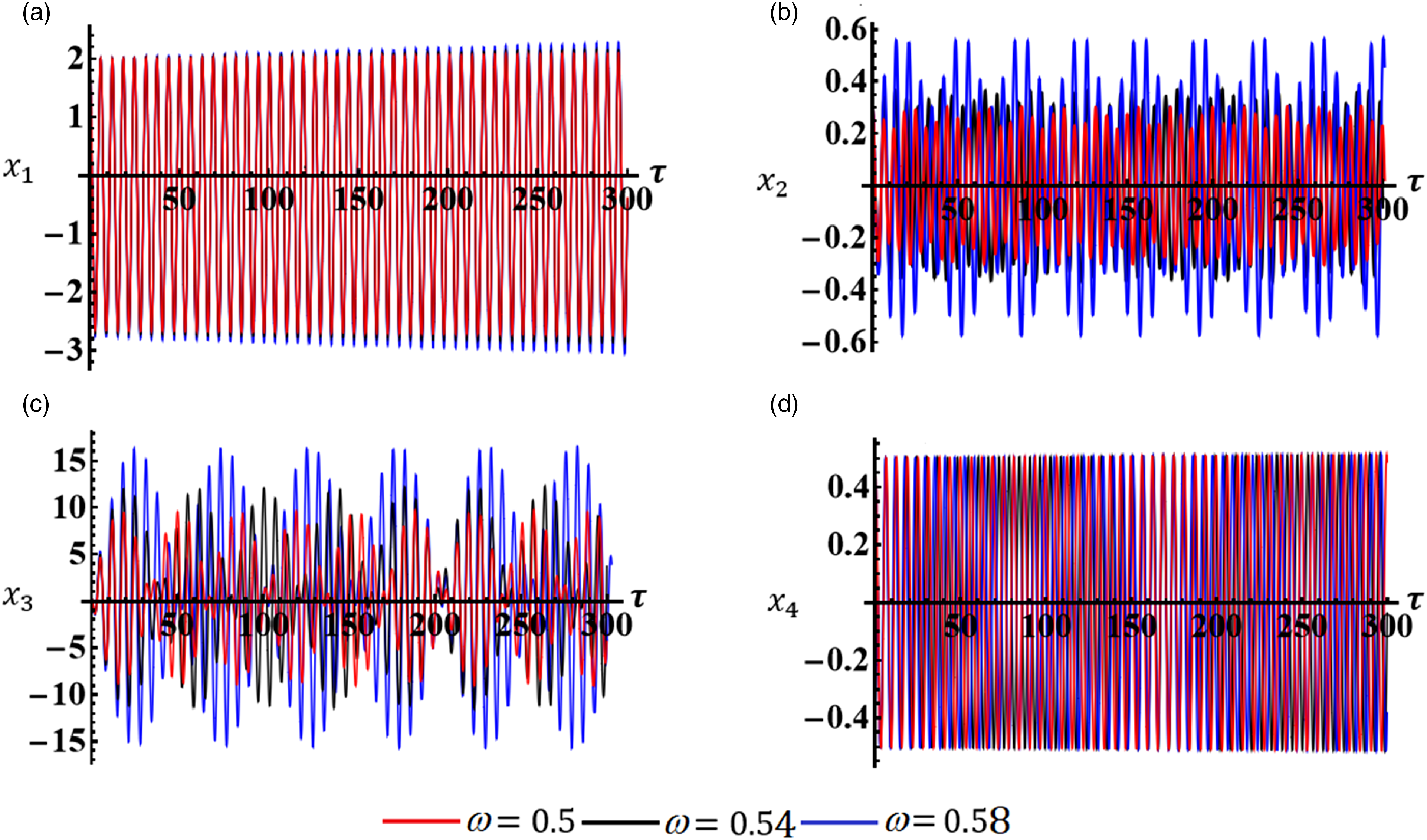
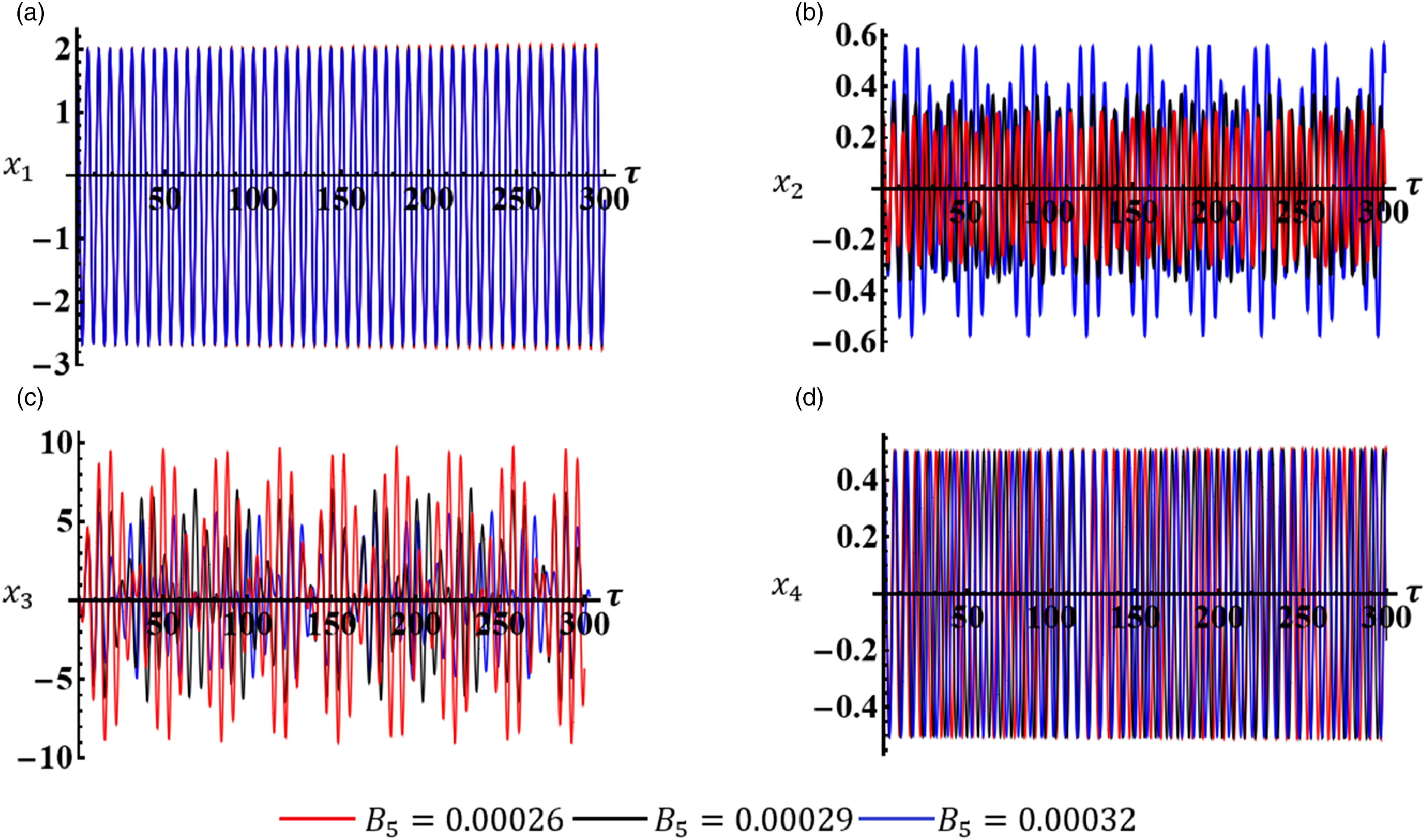

These data are selected values for the used parameters, where the stability of the proposed solver is indeed influenced by the specific parameter values of the system. In general, the 4-RKM is applied for a wide range of parameter values, provided that the time step is chosen appropriately. However, there are certain conditions that must be taken into account to ensure stability in the context of the system being analyzed.
Upon detailed analysis of Figures 2–5, it becomes evident that these plots are generated under the circumstance where Unveils the phase plane diagrams under the condition that Phase plane diagrams under the constraint that 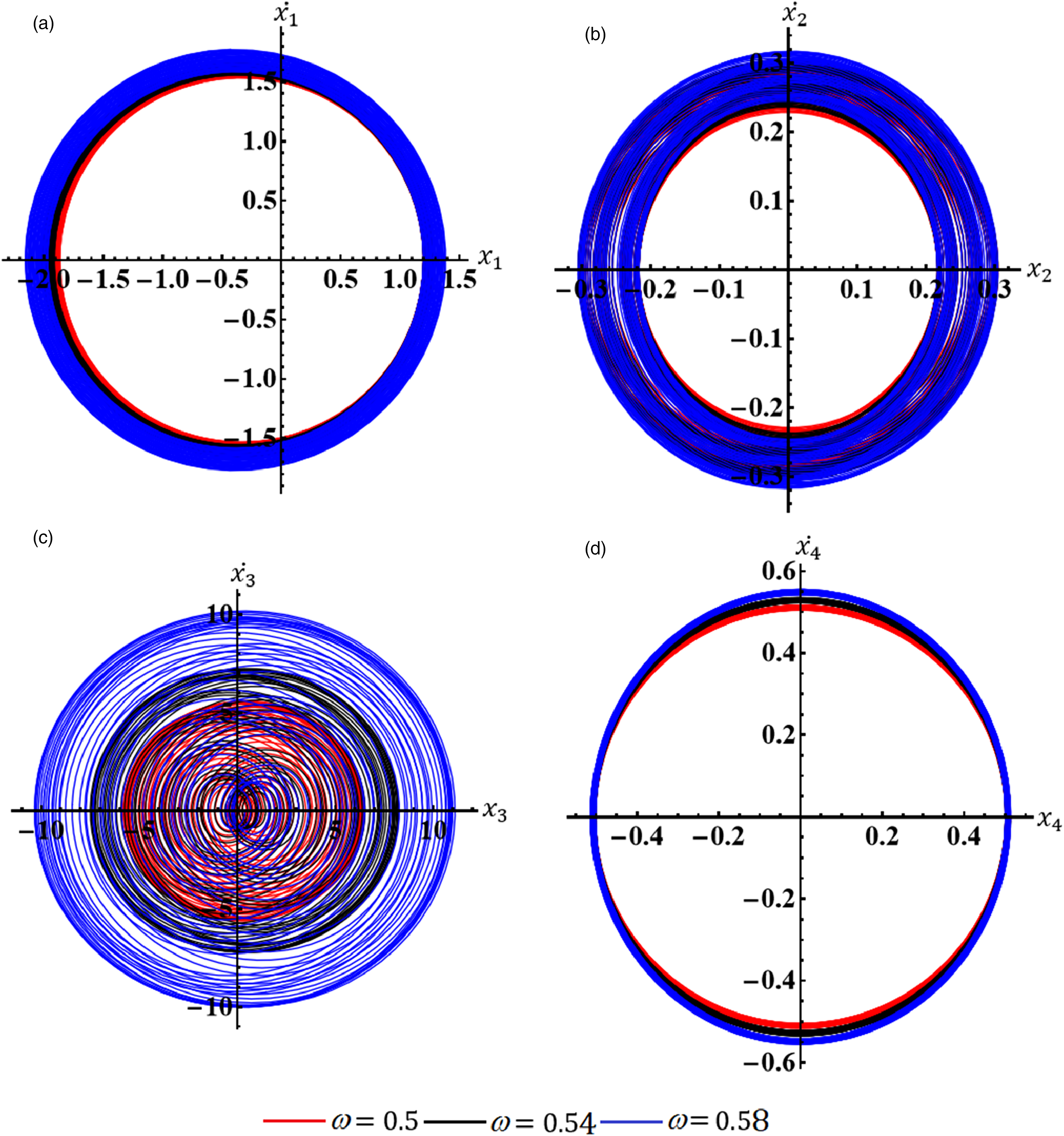
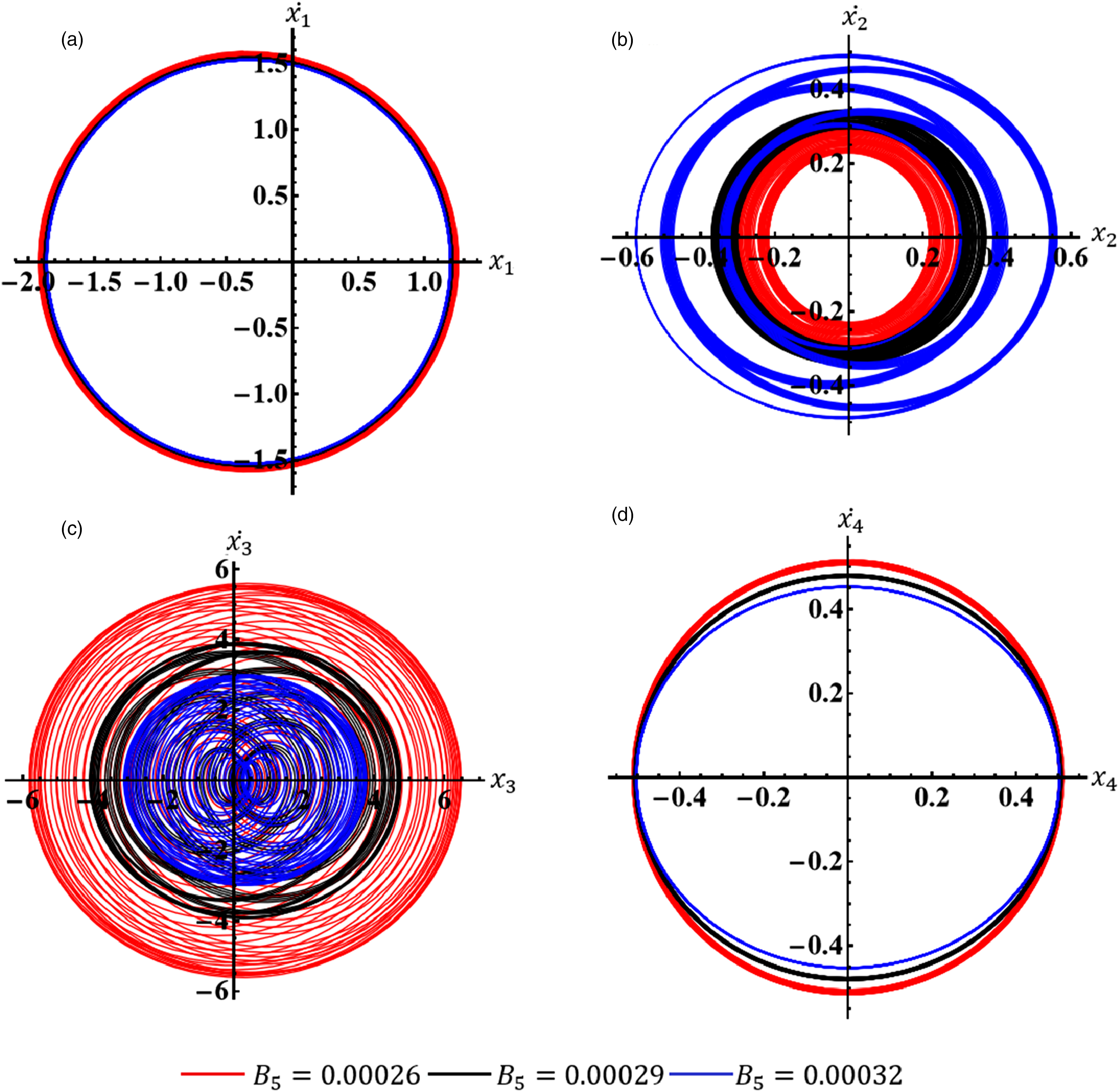
Phase plane analysis also allows us to identify and classify different types of trajectories exhibited by the system. These trajectories may include periodic orbits, limit cycles, spirals, and other complex patterns, each offering unique glimpses into the system’s dynamics. Moreover, phase plane analysis enables the study of bifurcations, which are qualitative changes in the system’s behavior as control parameters are varied. Bifurcation points mark critical transitions where the system undergoes a qualitative shift in its dynamics, leading to the emergence of new phenomena such as chaos, multiple stable states, or periodic oscillations. The connections between the angular solutions and their respective first-order derivatives are depicted in Figures 4 and 5 to construct phase plane diagrams for various values of
Chaotic motion
Chaotic motion is a fascinating phenomenon observed in dynamic systems across various scientific disciplines, ranging from physics and engineering to biology and economics. Unlike regular or periodic motion, chaotic motion is characterized by its unpredictability, sensitivity to initial conditions, and non-repeating trajectories. This unpredictability arises from the inherent complexity and nonlinear dynamics of chaotic systems, making them challenging yet intriguing subjects of study. It also emerges as a form of irregular and unpredictable movement observed in systems that exhibit extreme sensitivity to their starting conditions. Unlike truly random motion, chaotic behavior is governed by deterministic rules, where future states are entirely determined by initial conditions. However, despite its deterministic nature, practical prediction of chaotic motion proves challenging. Conversely, quasi-periodic motion lacks the regularity of periodic motion and the randomness of chaotic motion, yet maintains a semblance of order. This phenomenon arises when a system simultaneously embodies two or more frequencies that are not related by simple numerical ratios, thereby preventing repetitive patterns from emerging.
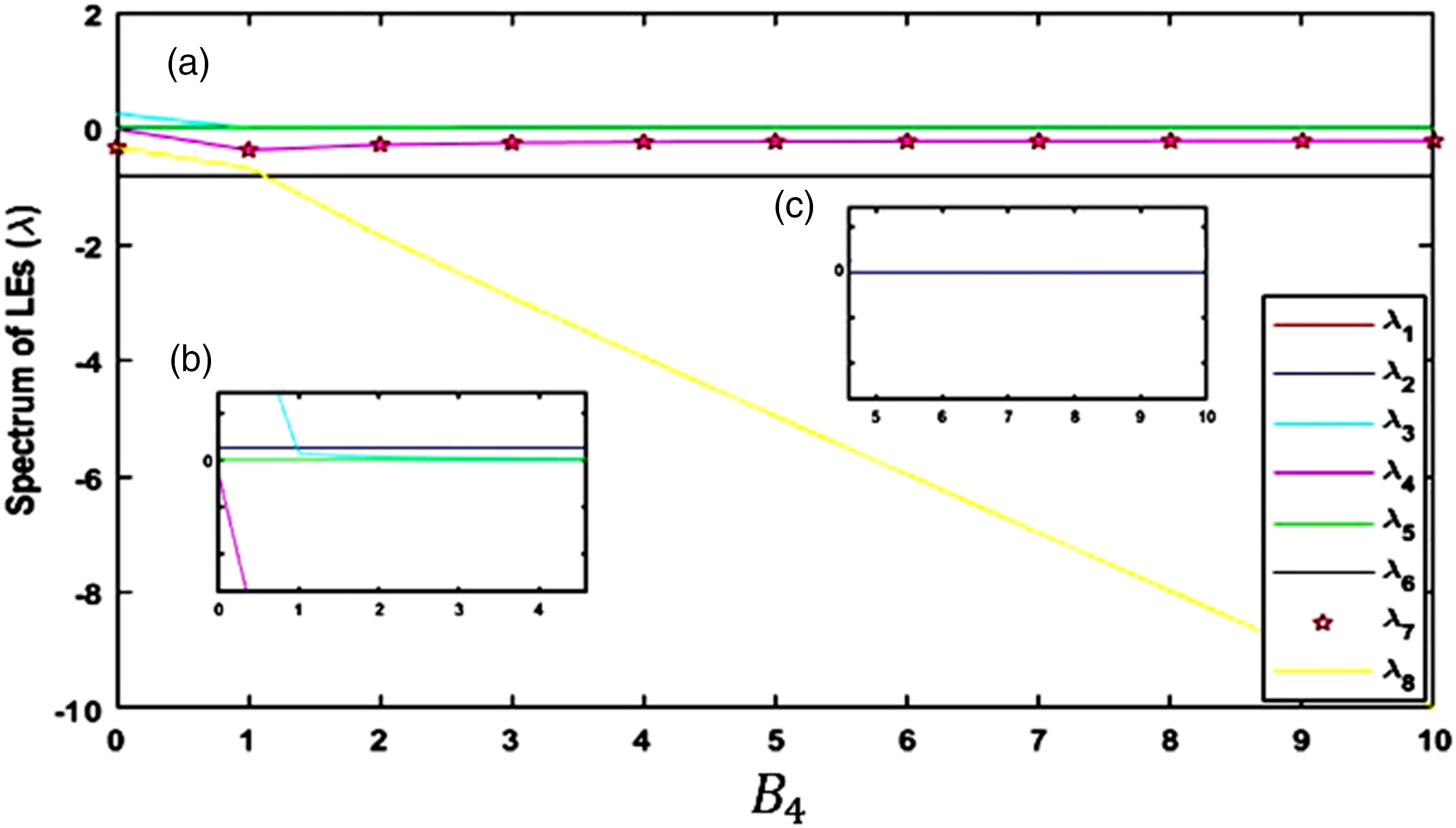
Here, we will demonstrate the two types of motion mentioned earlier, as observed in our dynamical system. Specifically, we will showcase Lyapunov spectra for Diagrams of bifurcation in (a) and (b) for Diagrams of the spectrum of Lyapunov for 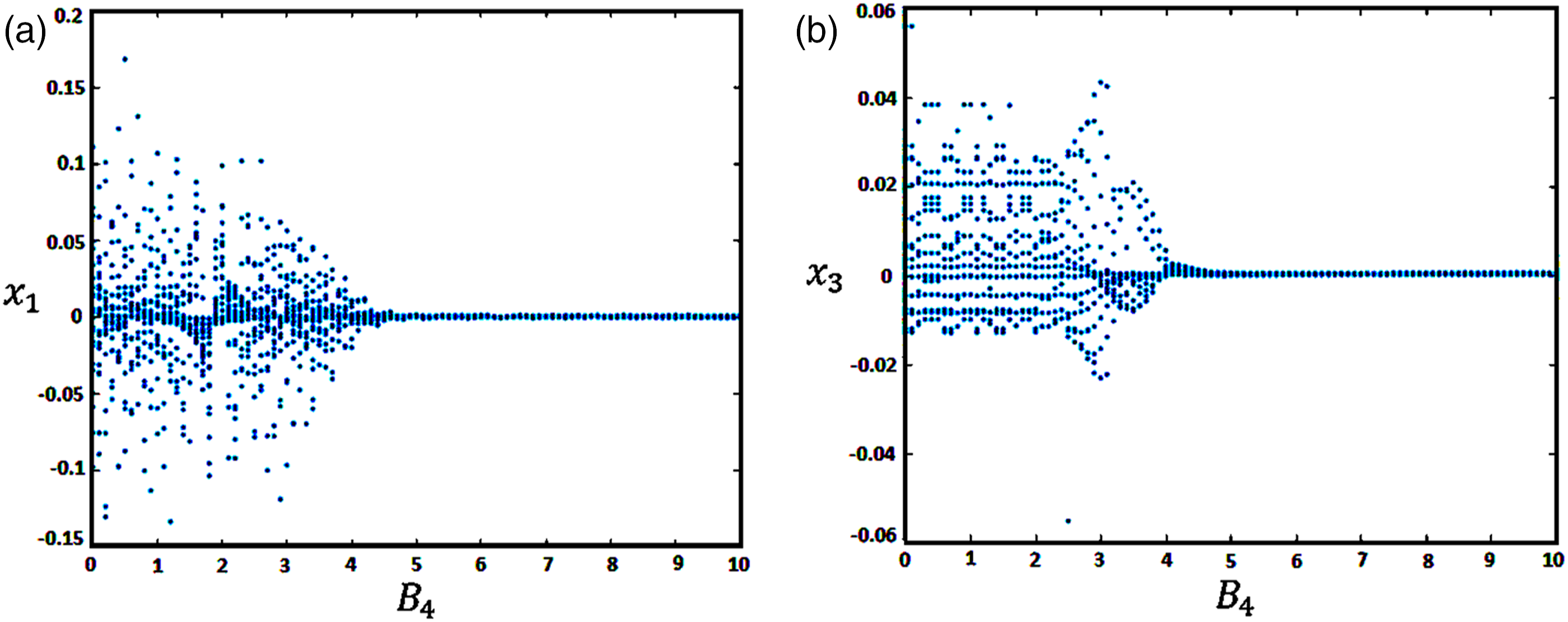
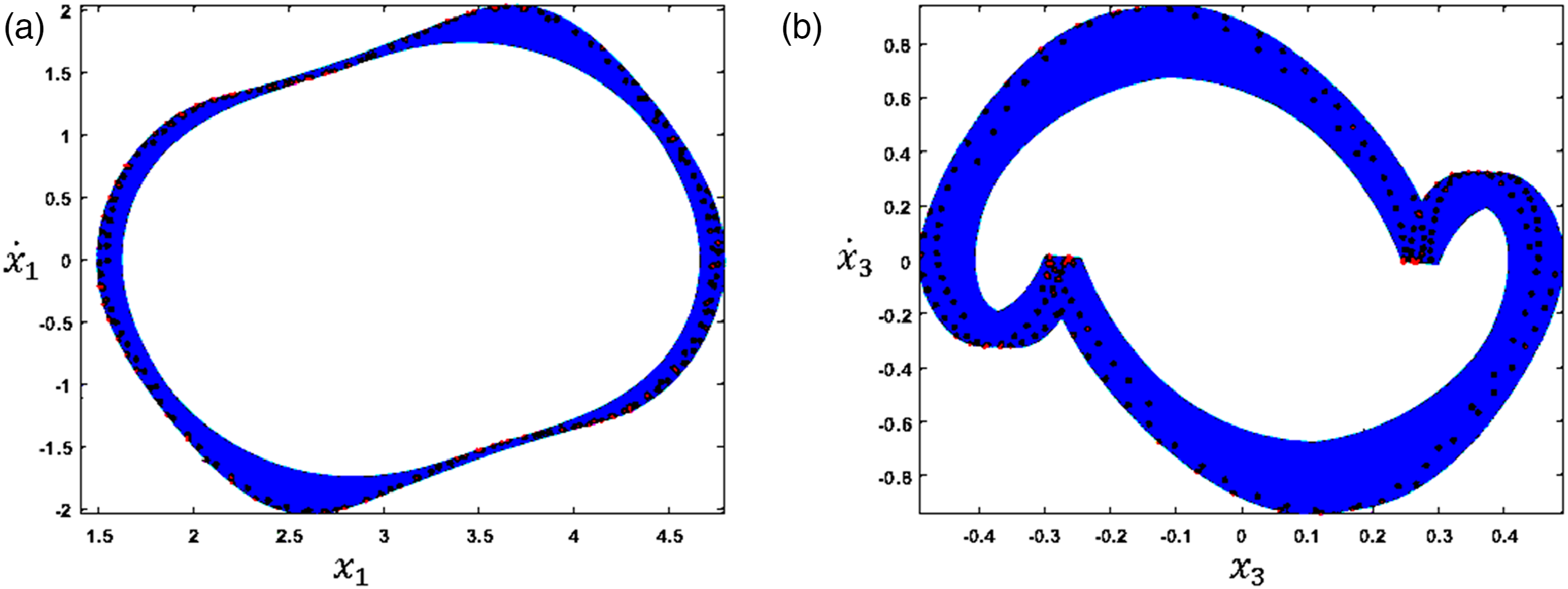
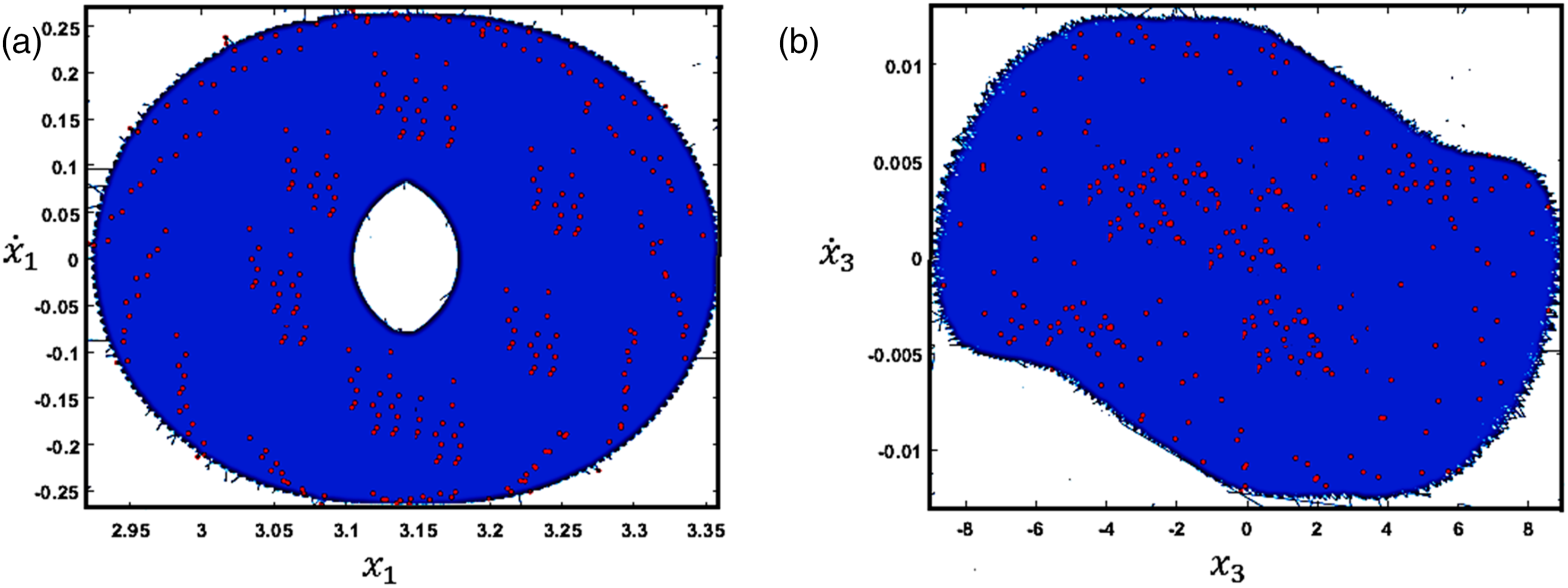
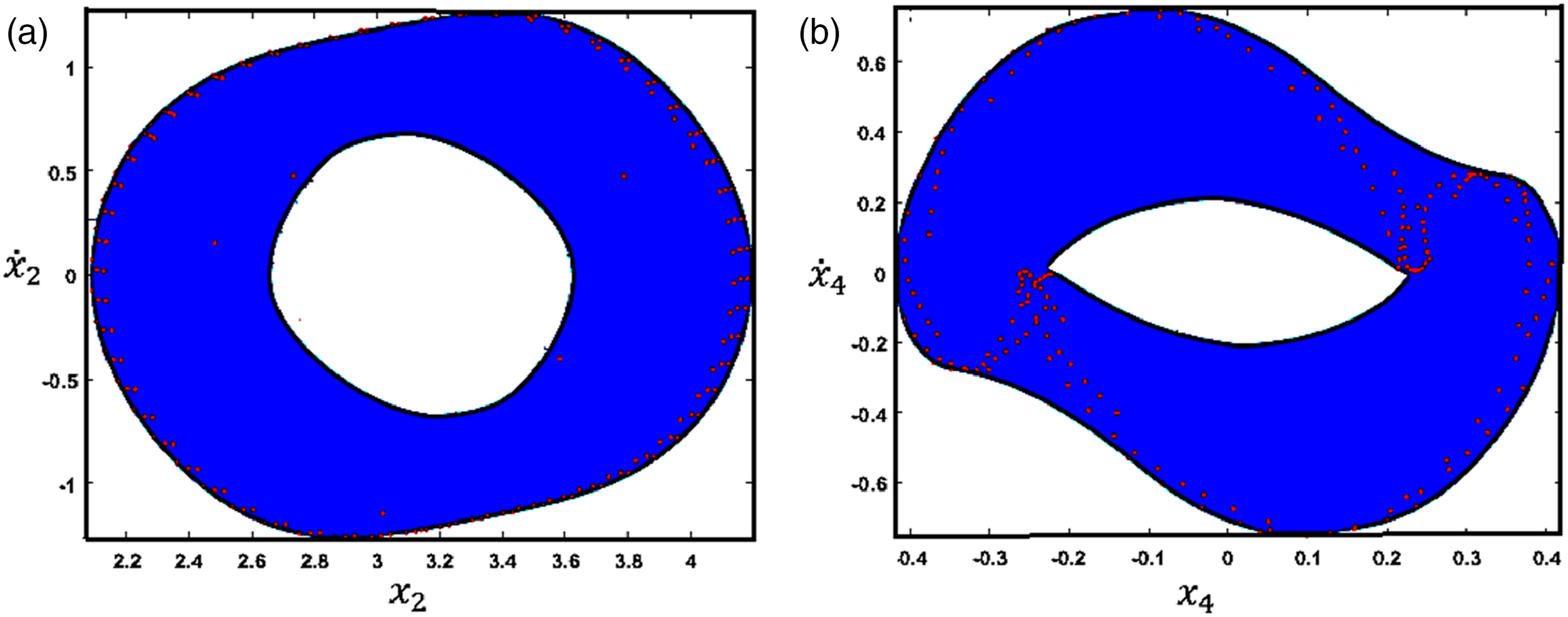
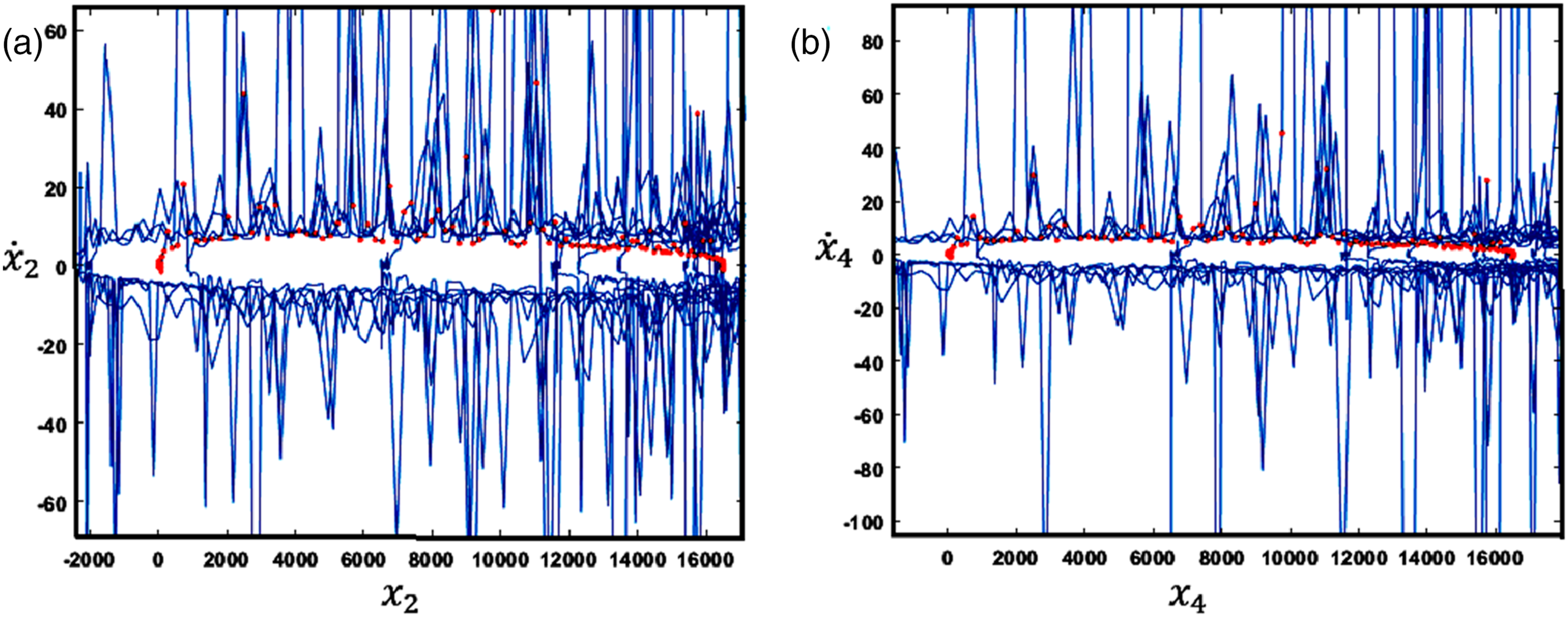
Poincaré maps present dots and phase portraits in Figures 8–10, with red dots representing points and blue curves depicting trajectories. For Figures 8 and 9, we selected two values of Phase portraits and maps of Poincaré for Phase portraits and maps of Poincaré for Phase portraits and maps of Poincaré for 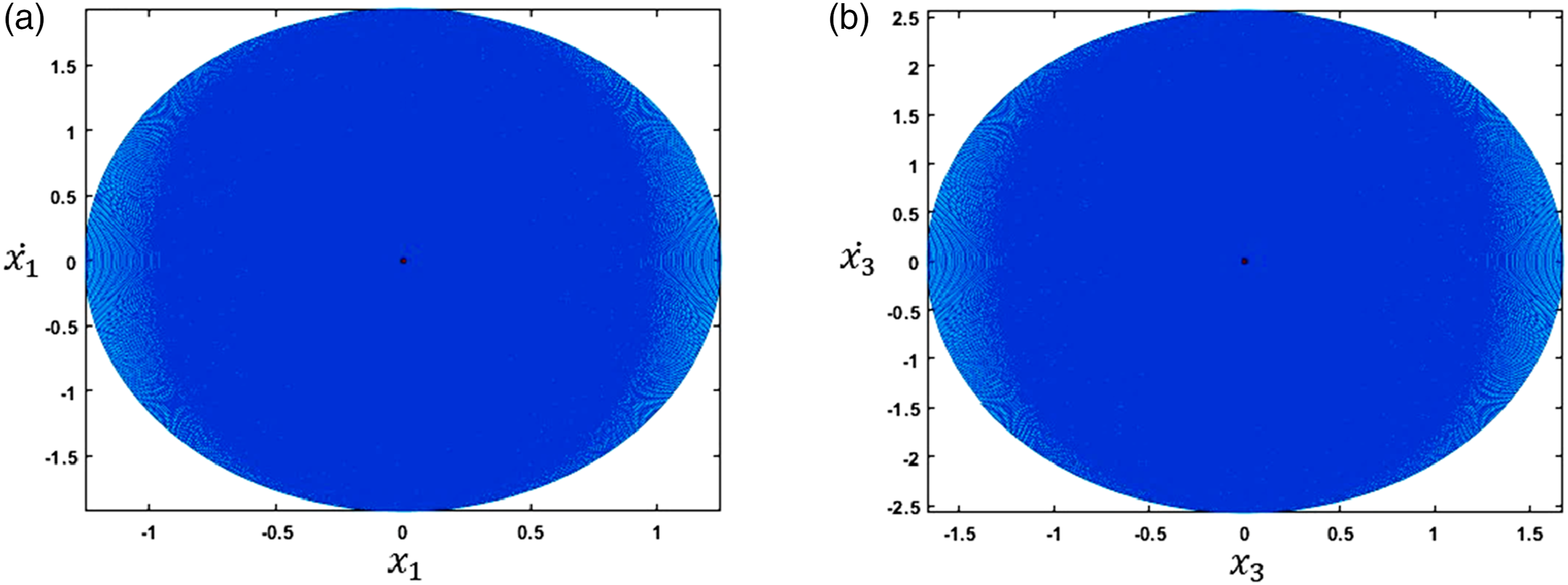
In Figure 11, the Lyapunov spectrum displayed diverse patterns of motion, delineated into two distinct intervals of Diagrams of bifurcation in (a) and (b) for 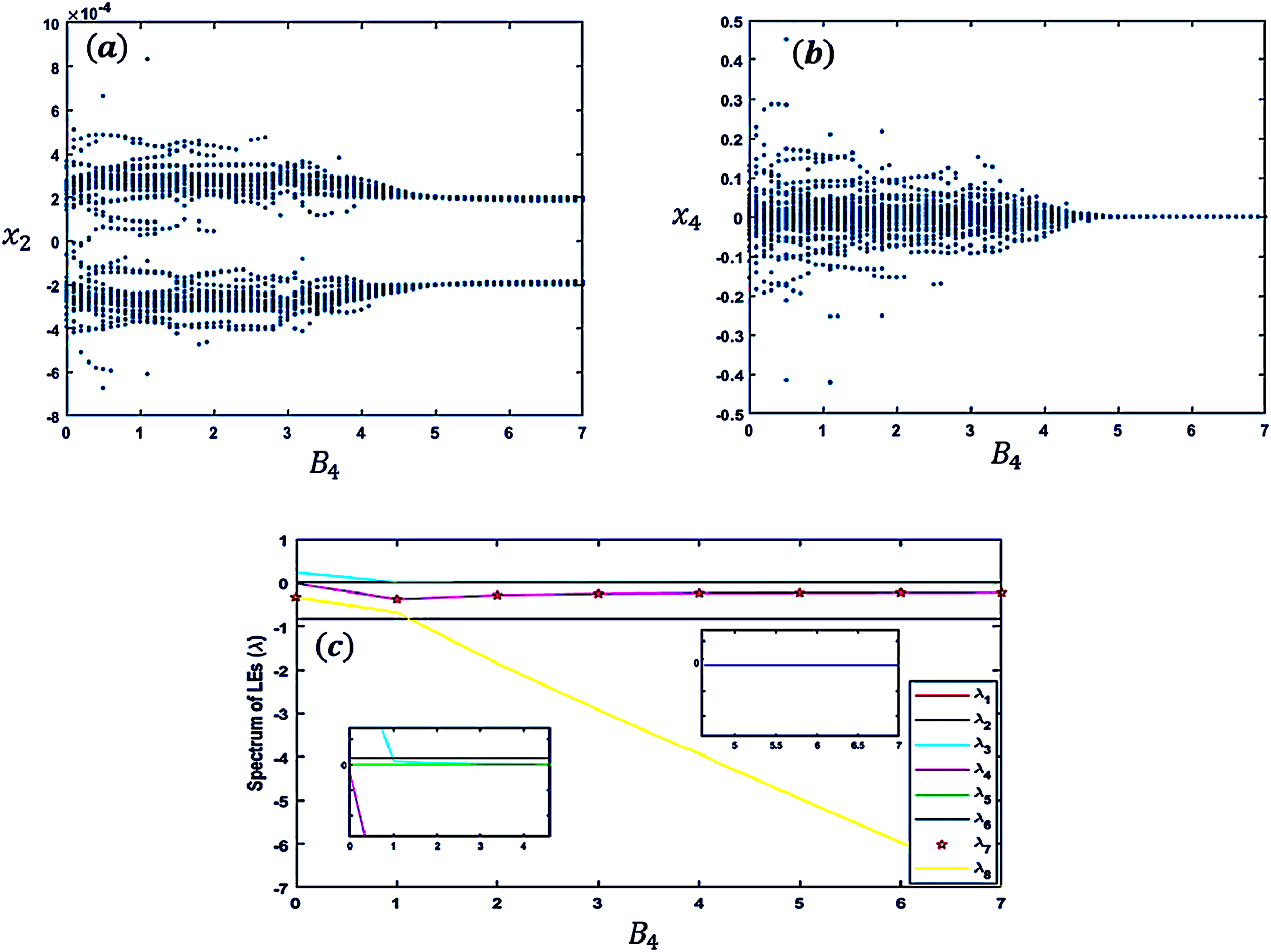
Poincaré maps depict dots and phase diagrams, represented by red dots and blue curves in Figures 12–14. For Figures 12 and 13, we selected two values of Phase portraits and maps of Poincaré for Poincaré maps and phase portraits for the variables Phase portraits and maps of Poincaré for Shows periodic, quasi-periodic, and chaotic regions at different values of 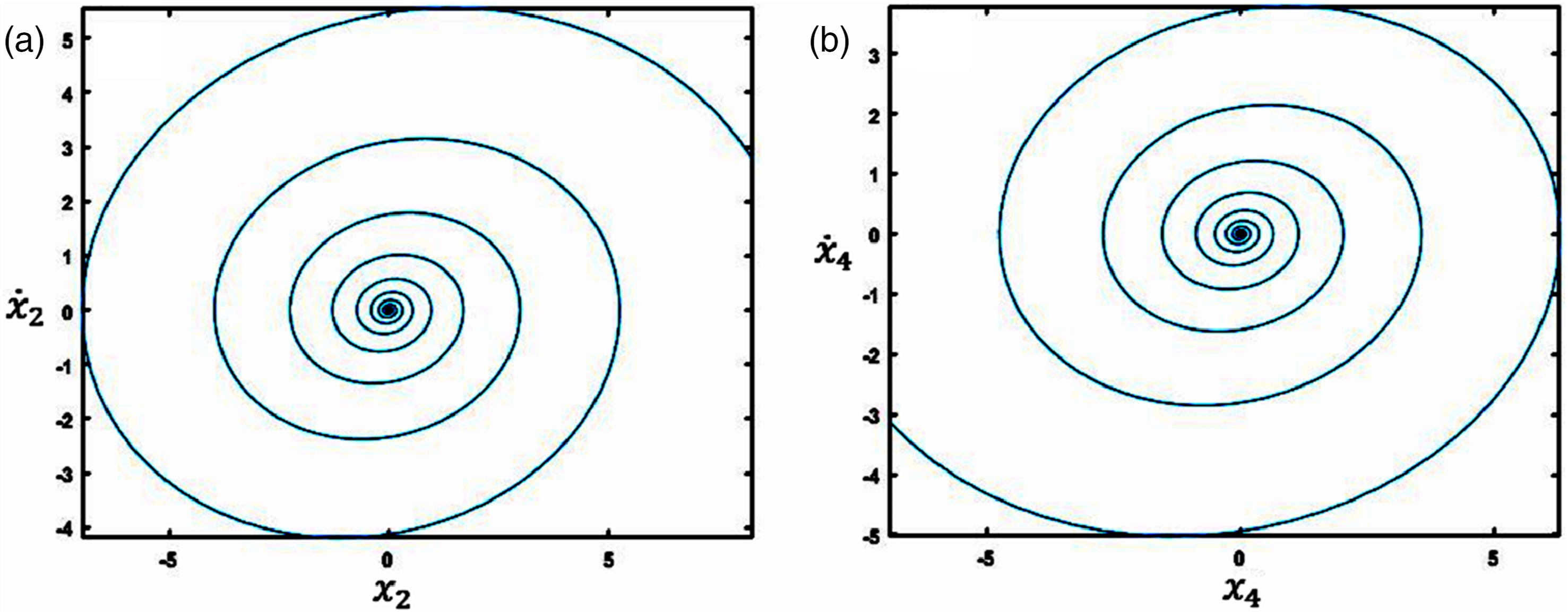

Analysis of system stability
It is possible to easily derive the controlling equations after obtaining the solvability conditions by studying four cases of external resonance simultaneously in the following form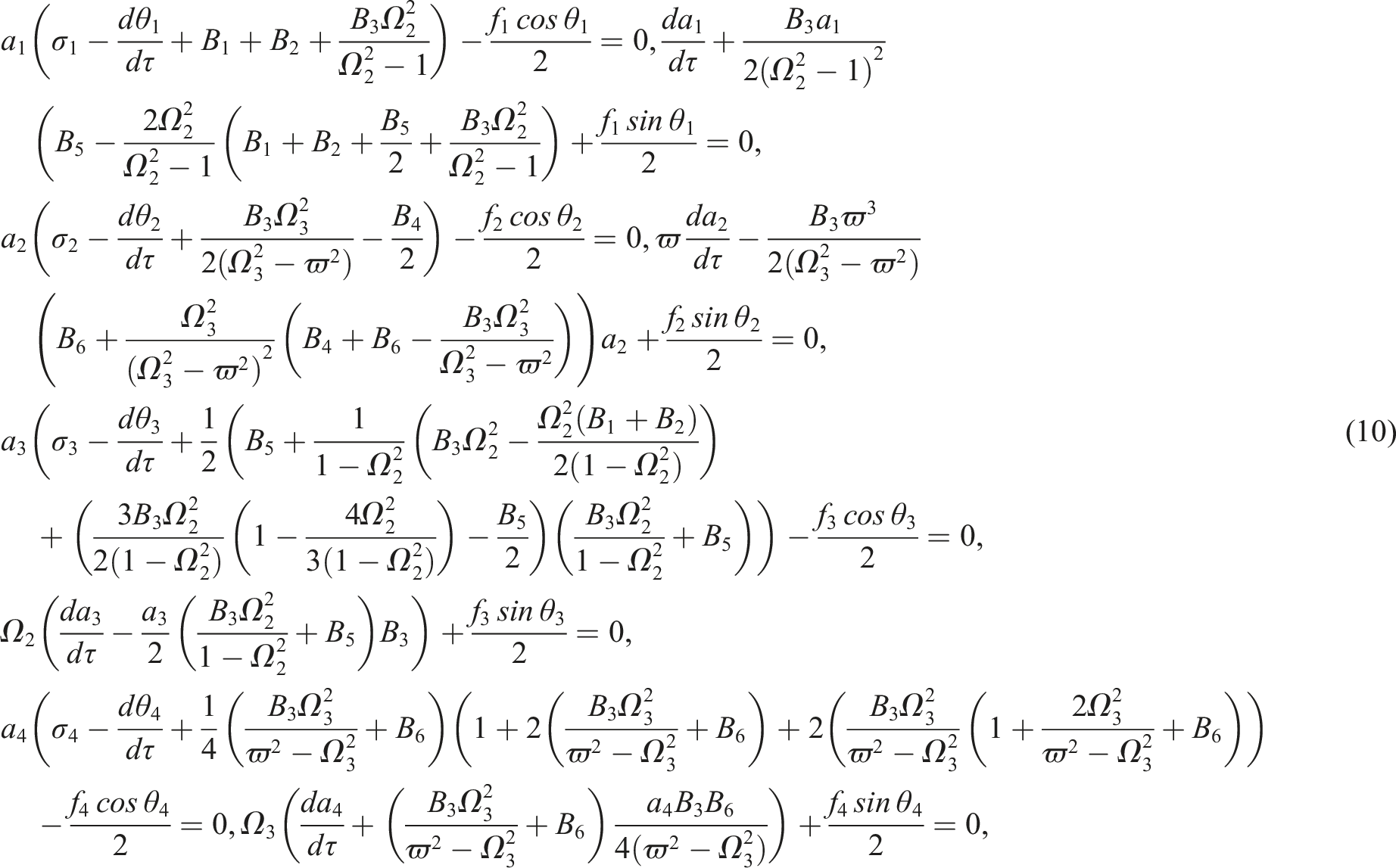
It is important to note that resonance happens when an external force aligns with the natural frequency of a system, causing substantial oscillations. As a result, it is demonstrated in
By approximating the proximity of 
These concepts can be expressed through the variable 
Now, we will examine the steady-state solution by setting the initial derivatives of variables 
The process of reducing this system to a more suitable form necessitates the elimination of the modified phases 
It’s crucial to highlight that a fundamental aspect of stability assessment entails investigating the situation of steady-state solutions.24,25 To delve into the behavior near fixed point neighborhoods, we’ll insert the subsequent expressions into the previously mentioned system (10)
The solutions of system (15) can be attained by expressing 
The RHC offers the essential conditions required for steady-state solutions 27 (see Appendix 1). These criteria were utilized in this study as a well-established method for assessing the stability of linearized systems by analyzing the coefficients of the characteristic polynomial. It is particularly suitable for the examined system, as it identifies stability conditions efficiently without explicitly calculating eigenvalues.
Now, we explore the dynamical behavior using linear stability analysis of this system. In addition to deriving equations that capture the system’s nonlinear aspects, we investigate the necessary conditions for stability. Key factors, like frequencies
A tailored approach with diverse the parameters has been employed to generate the stability plots of the system (10). The fluctuation amplitudes Illustrates resonance curves corresponding to the planes Expresses resonance curves corresponding to the planes Shows resonance curves corresponding to the planes Reveals resonance curves corresponding to the planes 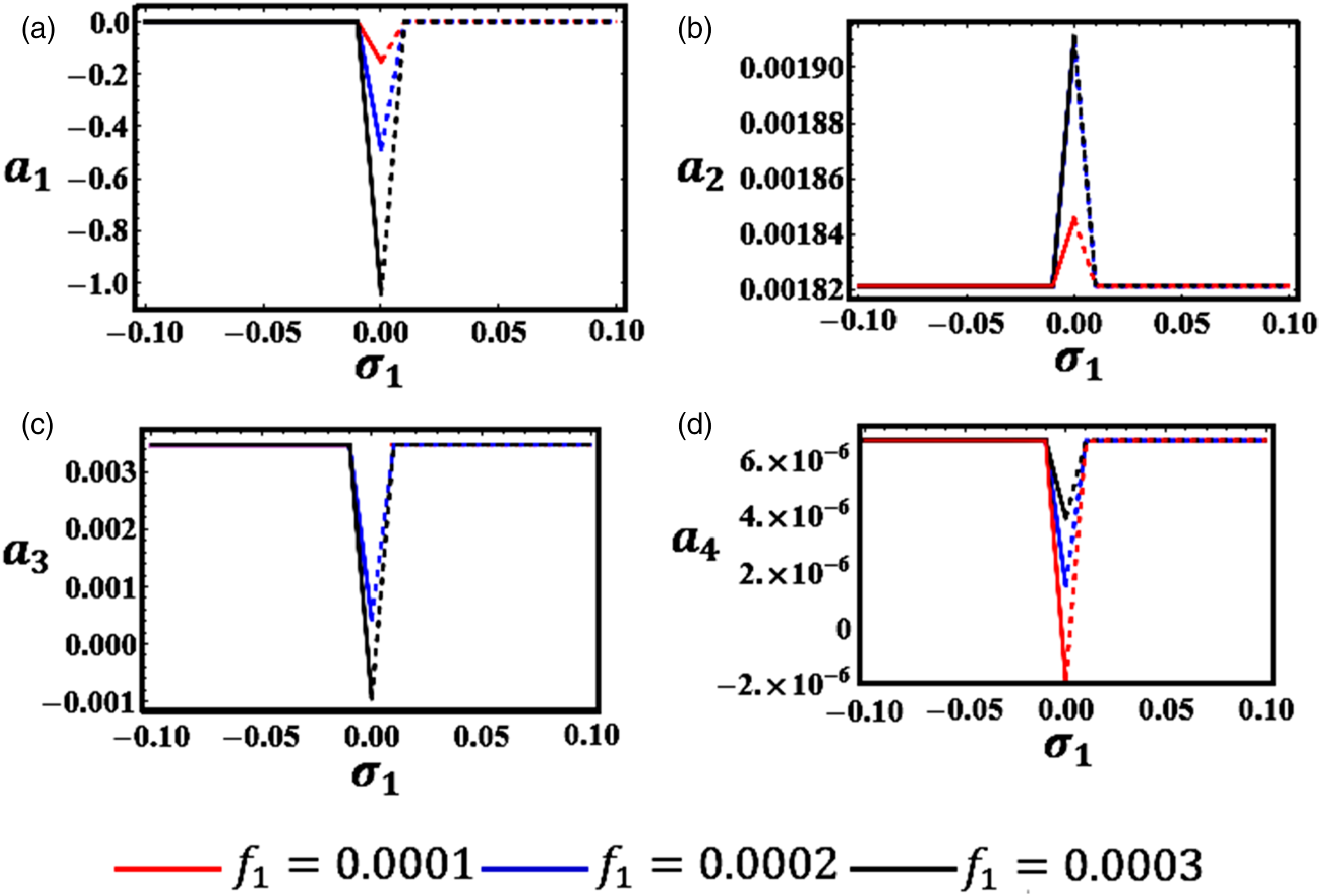
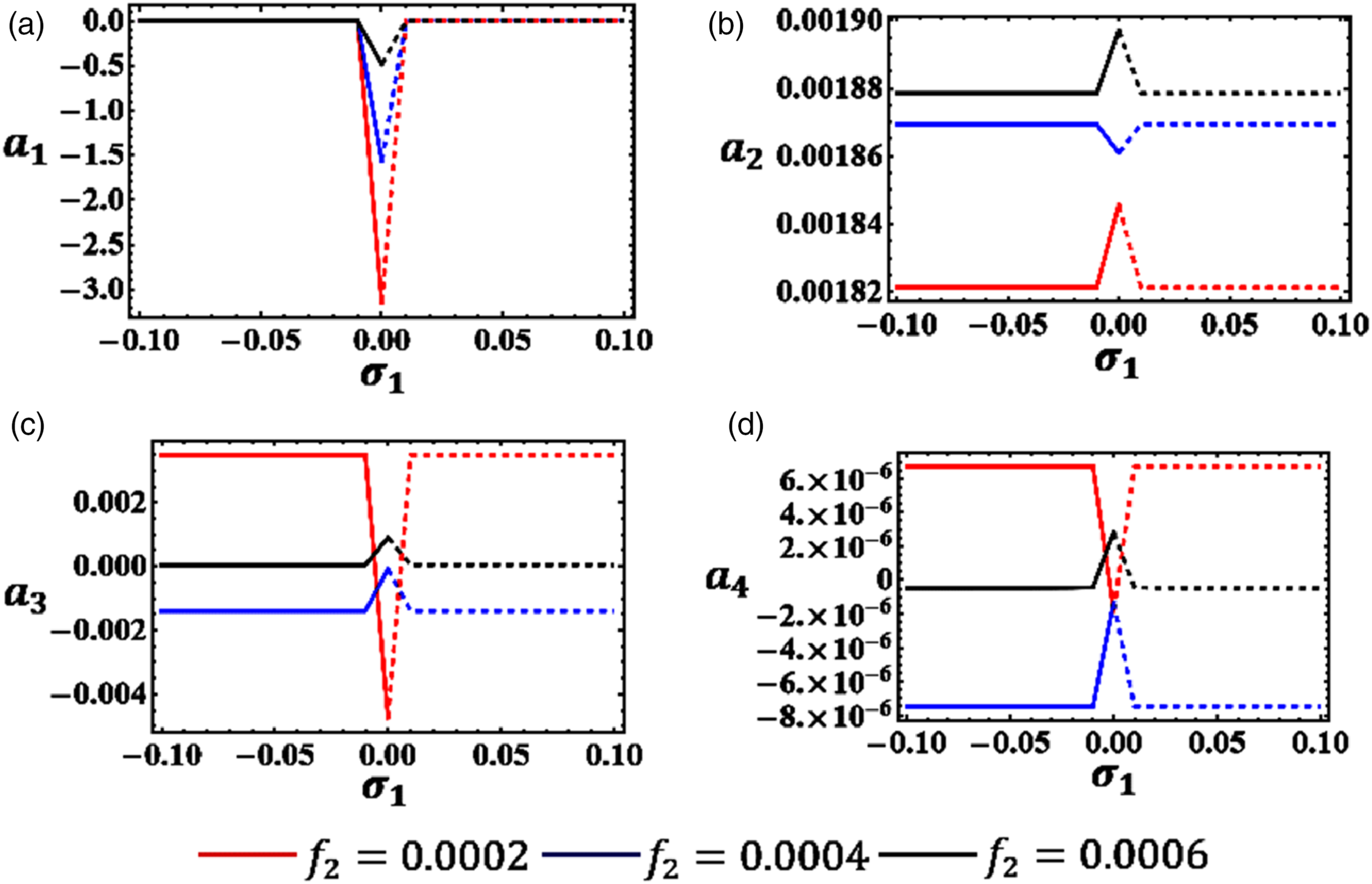
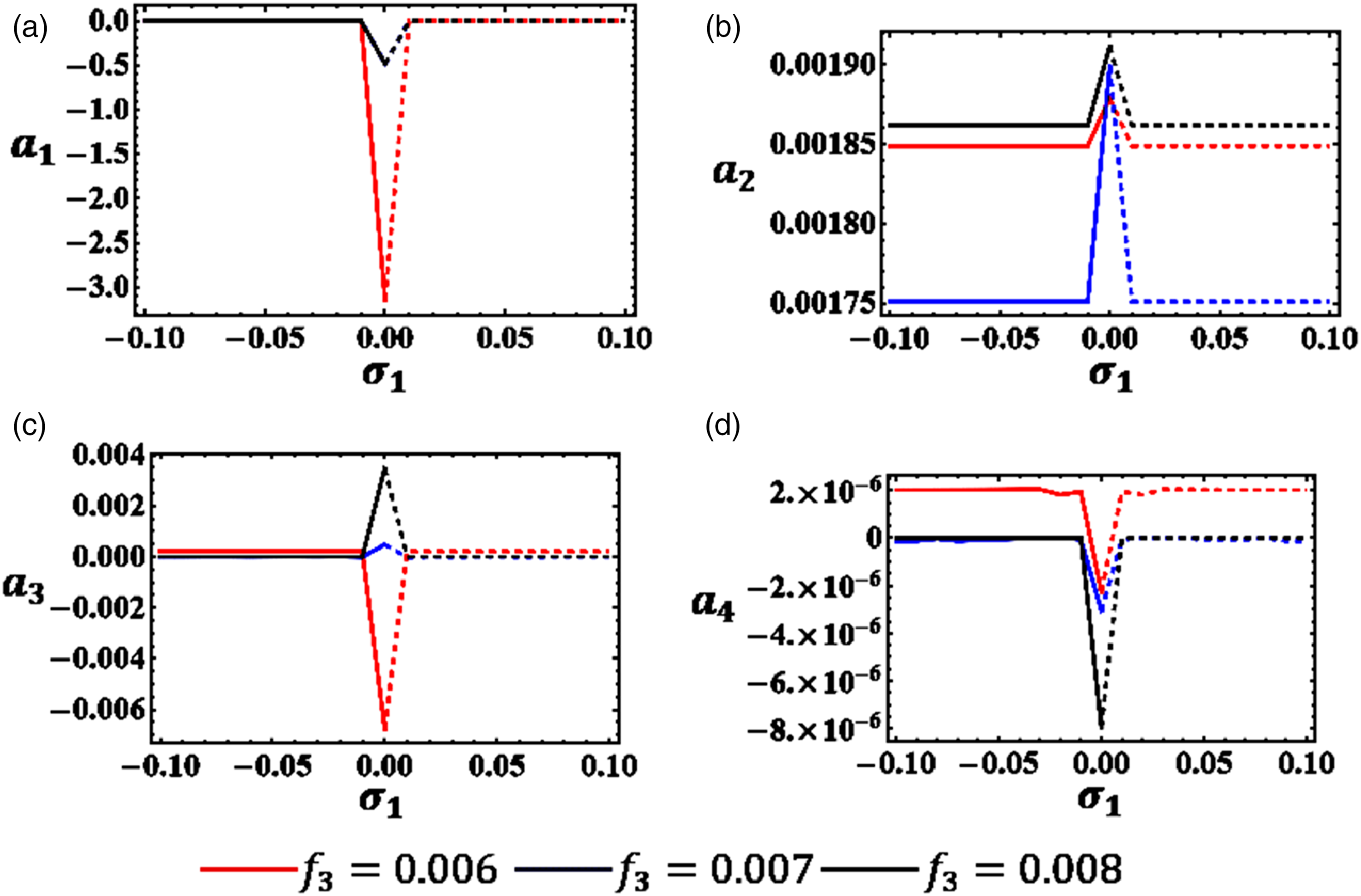
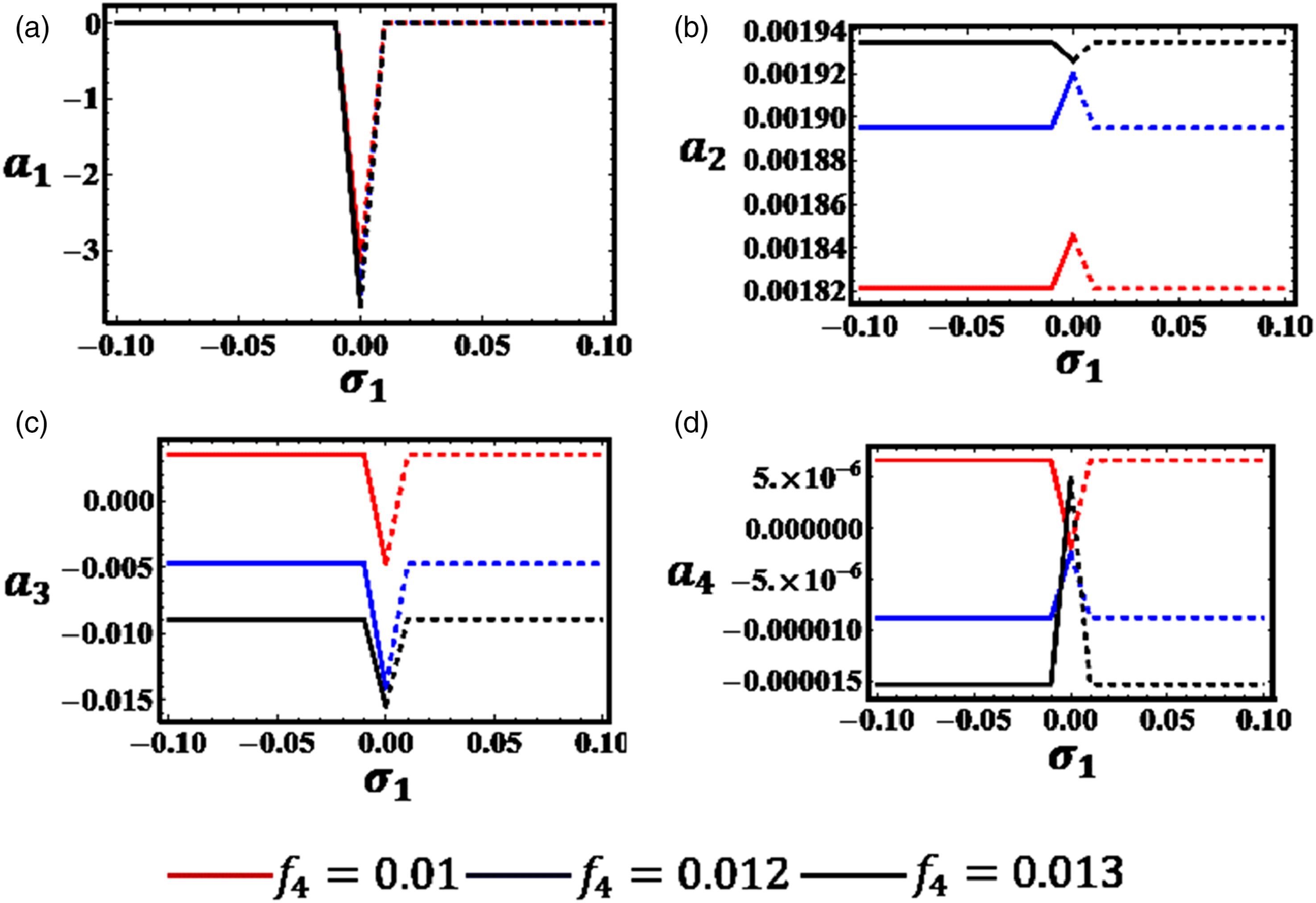
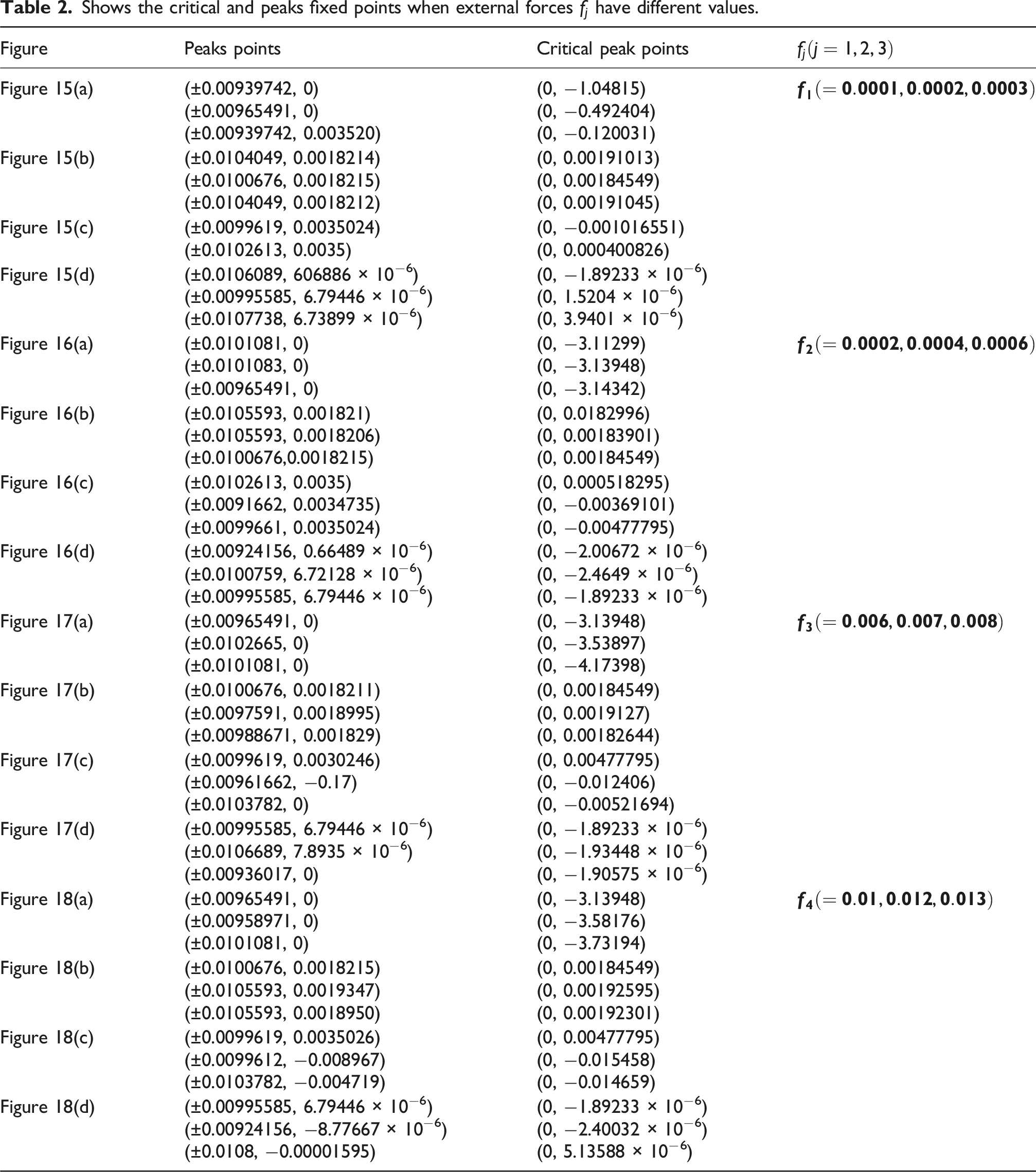
Shows the critical and peaks fixed points when external forces
Applications of the examined system
The examined system depicts a mechanical model with two masses, interconnected via springs and dampers, with external several forces acting on them. Therefore, it represents a coupled multi MDOF system. The significant applications of such a model include the following: • The design could resemble components of advanced suspension systems used in vehicles to absorb shocks and isolate vibrations from road irregularities. • The system might model vibration isolation in structures subjected to environmental forces like earthquakes or wind. • Buildings, particularly skyscrapers, often use similar tuned mass damper systems to mitigate oscillations. • The system may provide insights into seismic base isolators used in critical infrastructure to reduce earthquake-induced forces transmitted to a structure. • The multi-degree-of-freedom design (with internal and external components) could model vibration control systems in spacecraft or aircraft, where managing forces from engines or external disturbances is critical. • Using the system to model and mitigate vibrations via active or passive damping mechanisms. • Modeling base isolators for buildings or equipment to protect against seismic shocks. • Investigating coupled dynamic modes in spacecraft or aircraft structures. • Studying systems that convert mechanical energy from vibrations into electrical energy.
Conclusion
The dynamics of a multi-DoF system are examined in this paper. The nonlinear DEs governing the system were derived using LE and solved numerically with the 4-RKM. The phase plane analysis, exploring the connections between angular solutions and their corresponding first-order derivatives, has been examined. The analysis revealed three motion types in the system: periodic, quasi-periodic, and chaotic, which were explored using bifurcation diagrams, Poincaré maps, and Lyapunov spectra. The stability and instability regions of the fixed points in steady-state conditions were evaluated using the RHC. A nonlinear stability analysis was conducted to examine the steady-state behavior of the system under investigation. Addressing the practical implications of vibrational control across multiple engineering disciplines, this research holds significant scientific and application-orientated importance. The described system offers a practical model for designing vibration isolation platforms. The outer hollow block symbolizes the supporting structure, while the oscillating mass simulates an isolator precisely tuned to absorb and reduce external vibrations impacting sensitive equipment.
Footnotes
Author contributions
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data sharing is not applicable to this research as no datasets were created or analyzed.