
Abstract
This paper aims to deepen the understanding of the dynamic behavior of a pendulum attached to a rotating rigid frame, where the frame rotates with a constant angular velocity around a vertical axis passing through the pendulum’s pivot point. To provide a basis for comparison, the motion of a simple pendulum is also examined. The motivation for this study arises from the need for accurate and efficient analytical methods to predict the complex dynamics of such systems under varying conditions. A key contribution is the development of a modified version of He’s homotopy perturbation method (HPM), achieved through a novel time scaling and a reformulated power series expansion for the frequency. This approach allows the infinite series solution to be truncated at the first-order approximation, with iterative refinements introduced into higher-order terms of the governing differential equation. The validity and accuracy of the modified HPM are demonstrated by comparing its analytical solutions with numerical results obtained via the fourth-order Runge–Kutta method (RK4) and with established findings from the literature. Additionally, graphical analyses of the pendulum’s time histories are presented to explore how system parameters such as angular velocity and initial conditions influence its dynamic behavior. These findings provide a robust modified homotopy perturbation method (MHPM) for investigating similar nonlinear dynamical systems, addressing practical challenges in predicting their motion and contributing to the broader understanding of their complex interactions.
Keywords
Introduction
Many engineering problems can be modeled by nonlinear ordinary or partial differential equations, but obtaining exact solutions is often highly complex or even impossible, with only a few exceptions. This complexity arises from the intrinsic nature of nonlinearity, where interactions between variables are not directly proportional, leading to behaviors such as bifurcations, chaos, and other intricate dynamics. As a result, asymptotic solutions, which approximate solutions under specific limiting conditions, have gained significant attention among scientists and engineers tackling various nonlinear equations.
For weakly nonlinear problems, classical methods like the averaging method 1 and the small parameter method 1 have been commonly employed. These techniques simplify the original problem into a form that can be more easily analyzed, often by isolating dominant terms and treating others as perturbations. In addition to these foundational approaches, more advanced methods such as the multiple scales (MS) method2–4 and the Lindstedt–Poincaré (LP) method 5 have been developed. These methods offer valuable advantages in solving vibratory systems by addressing resonance and periodic solutions in nonlinear dynamics. However, their accuracy critically depends on the proper selection of a small parameter, and an incorrect choice may lead to erroneous or physically unrealistic solutions.
Over time, researchers have developed numerous analytical approximation methods to expand the range of solvable nonlinear oscillatory systems. These include the harmonic balance method,6,7 which simplifies nonlinear differential equations by assuming a harmonic form of the solution, and the energy balance method,8,9 which uses conservation principles to derive approximate frequencies. Other notable techniques include He’s frequency formulation,10–12 the iteration perturbation method, 13 homotopy perturbation method,14,15 the max-min approach, 16 the integer and non-integer order method, 17 the Hamiltonian method, 18 and the numerical method. 19 Collectively, these methods have significantly enhanced the analytical toolbox for addressing both weakly and strongly nonlinear oscillatory systems, providing insights into behaviors that are difficult to capture through purely numerical simulations.
The study of pendulums occupies a central role in understanding oscillatory motion and fundamental mechanics. Many engineered structures incorporate various types of pendulums, such as tuned mass dampers in skyscrapers and pendulum-based energy harvesters. Simple pendulums, in particular, serve as a foundational model for investigating oscillatory systems due to their mathematical tractability and physical relevance. While small-angle deflections allow pendulum motion to be approximated as linear, real-world scenarios often involve large-angle motions where the governing equations exhibit significant nonlinearity. Exact solutions to these nonlinear equations are rarely available, necessitating the development and application of robust analytical methods that can accurately describe the system’s dynamics.
This study focuses on the dynamic behavior of a pendulum attached to a rotating rigid frame. The frame rotates with a constant angular velocity around a vertical axis passing through the pendulum’s pivot point, introducing additional complexities into the equations of motion due to the rotational forces. The system’s nonlinear nature makes it challenging to obtain exact solutions, particularly when considering large deflection angles or high rotational speeds.
To address this problem, the motion of a simple pendulum is also analyzed as a comparative case. The governing equations for both systems are nonlinear and include terms that are difficult to handle using conventional analytical methods. A critical challenge in solving these equations is the reliance on Taylor series expansions of trigonometric functions, which tend to lose accuracy as the deflection angle increases. For large angles, these approximations often introduce significant errors or require substantial computational effort to achieve acceptable accuracy.
This study aims to overcome these challenges by developing a modified analytical approach that eliminates the dependency on Taylor series expansions. This approach not only improves the accuracy of solutions for large-angle deflections but also reduces computational complexity, making it a more practical tool for analyzing the dynamics of pendulums in real-world scenarios.
The dynamic behavior of pendulums has been a topic of extensive research, with numerous studies exploring various configurations and employing diverse methods to solve the governing equations. For example, He et al. 20 investigated the periodic behavior and fluctuation of a rotating pendulum system, providing insights into its complex motion. Moatimid and Amer21,22 studied pendulums coupled with springs or influenced by magnetic forces, deriving governing equations such as cubic-quintic Duffing equations to describe their dynamics. These studies highlight the rich diversity of pendulum systems and the corresponding mathematical models used to analyze them.
Ismail et al.23,24 employed semi-analytical approaches and the gamma function method (GFM) to study pendulums in rotational frames. Samadi et al. 25 used Akbari–Ganji’s method (AGM) and homotopy perturbation method for rotational pendulum. These methods have shown promise in addressing specific aspects of pendulum dynamics but often require significant computational effort or are limited in their applicability to certain parameter ranges. Other researchers, such as Ghafoori et al., 26 utilized the differential transformation method, while Moatimid et al. 27 applied the non-perturbative methodology (NPM) to analyze pendulums in rotational frames. These contributions underscore the breadth of techniques available for tackling pendulum dynamics and the ongoing need for innovative approaches that address their limitations.
In the context of simple pendulums, techniques such as the harmonic balance method, the homotopy perturbation method (HPM), the homotopy analysis method (HAM), and the rational harmonic balance method have been widely used. Beléndez et al.,28–31 in particular, have made significant contributions to this area by employing these methods to solve nonlinear pendulum equations. However, most of these studies rely on Taylor series expansions of sine and cosine functions, which constrain their accuracy for large deflection angles. This limitation has motivated researchers to explore alternative approaches that directly use trigonometric functions or employ novel analytical techniques to improve accuracy and efficiency.
The present study seeks to address the limitations of conventional methods by developing a modified homotopy perturbation method (MHPM). Unlike traditional approaches, the MHPM eliminates the dependency on Taylor series expansions, thereby enhancing computational efficiency and accuracy for larger deflection angles. This modification also addresses the challenges associated with obtaining higher-order approximation solutions, which are often unattainable with the standard homotopy perturbation method.
The MHPM is applied to derive asymptotic solutions for the nonlinear equations of motion of a pendulum in a rotating rigid frame and a standard simple pendulum. The proposed method’s effectiveness is demonstrated by comparing its analytical results with numerical solutions obtained using the fourth-order Runge–Kutta method (RK4) and with findings from previous studies. These comparisons validate the accuracy of the MHPM and highlight its advantages over existing methods.
In addition to numerical validation, the study presents a comprehensive analysis of the pendulum’s dynamic behavior through tables and graphical illustrations. These results explore the influence of key system parameters, such as angular velocity and initial conditions, on the pendulum’s motion. By providing a detailed examination of these effects, the study offers valuable insights into the complex interplay of forces in pendulum systems, enhancing our understanding of their dynamics.
This work contributes to the broader field of nonlinear dynamics by offering a robust analytical framework for predicting the behavior of pendulum systems under varying conditions. The MHPM’s ability to accurately solve nonlinear equations with minimal computational effort makes it a valuable tool for engineers and researchers studying similar systems. By addressing the limitations of traditional methods and extending the range of solvable problems, this study advances the state of the art in pendulum dynamics and analytical approximation techniques.
Modified homotopy perturbation method 32
For describing the method at first, we take into account an oscillator with strong nonlinearity as


If we chose


According to the present MHPM, solution of the equation (4) is considered as


We now use the values of
We can see from equation (4), as


The MHPM solution and frequency response of equation (1) is thus represented by equations (7) and (8).
Examples
The rotating pendulum
The subsequent implementation, as illustrated in Figure 1, utilizes nonlinear differential equations (NLDEs) to thoroughly simulate the dynamic behavior of a simple pendulum attached to a rotating solid framework. By integrating NLDEs, the model offers a more precise and realistic depiction of the pendulum’s response to rotational influences. The system’s governing equation of motion is20,23–25,33 Schematic of a rotating pendulum.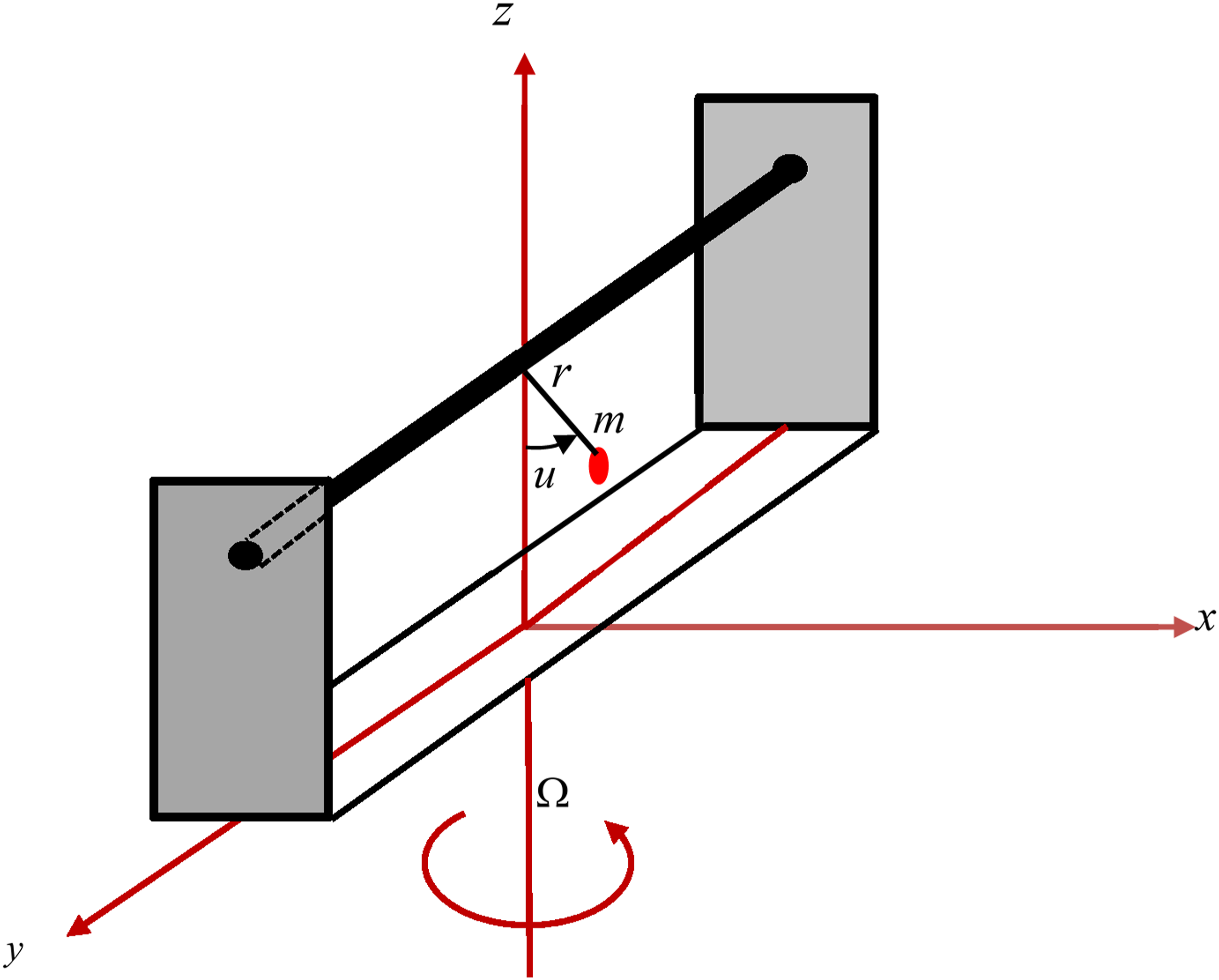

If


Substituting the values of



The solution of equation (12) is

By substituting the value of

Fourier series expansions for




We consider

Avoiding secular term, we get

Thus, the zeroth-order approximate frequency is

Which is same as the first-order approximate frequency determined by Moatimid et al.
27
Remaining part of equation (21) is written as follows:


Substituting equations (25) into (24) gives



From equation (14), it is obvious that the value of







The first approximate frequency

It is possible to do the following Fourier series expansion




From equation (36), the secular term can be eliminated if

Thus, the first-order approximate frequency is


Simple pendulum
We consider the equation of motion of a simple pendulum as28–31

The first approximation for the solution of pendulum equation is obtained using MHPM as follows:


Results and discussion
This section provides a comprehensive analysis of the accuracy and efficiency of the modified homotopy perturbation method (MHPM) across a range of parameters, highlighting its superior performance in frequency and period approximations. Notably, the first-order approximation of frequencies using MHPM delivers exceptionally accurate results for both examples. A critical advancement in this work is the decision to retain the sine function in its entirety rather than employing a Taylor series expansion, as is common in many traditional methods for solving the rotating pendulum equation. While Taylor series expansions are effective for small deflection angles, they introduce significant errors as the pendulum’s deflection approaches higher degrees. In contrast, retaining the full sine function allows MHPM to maintain high accuracy, even for large deflection angles.
Comparison among frequencies obtained various methods for
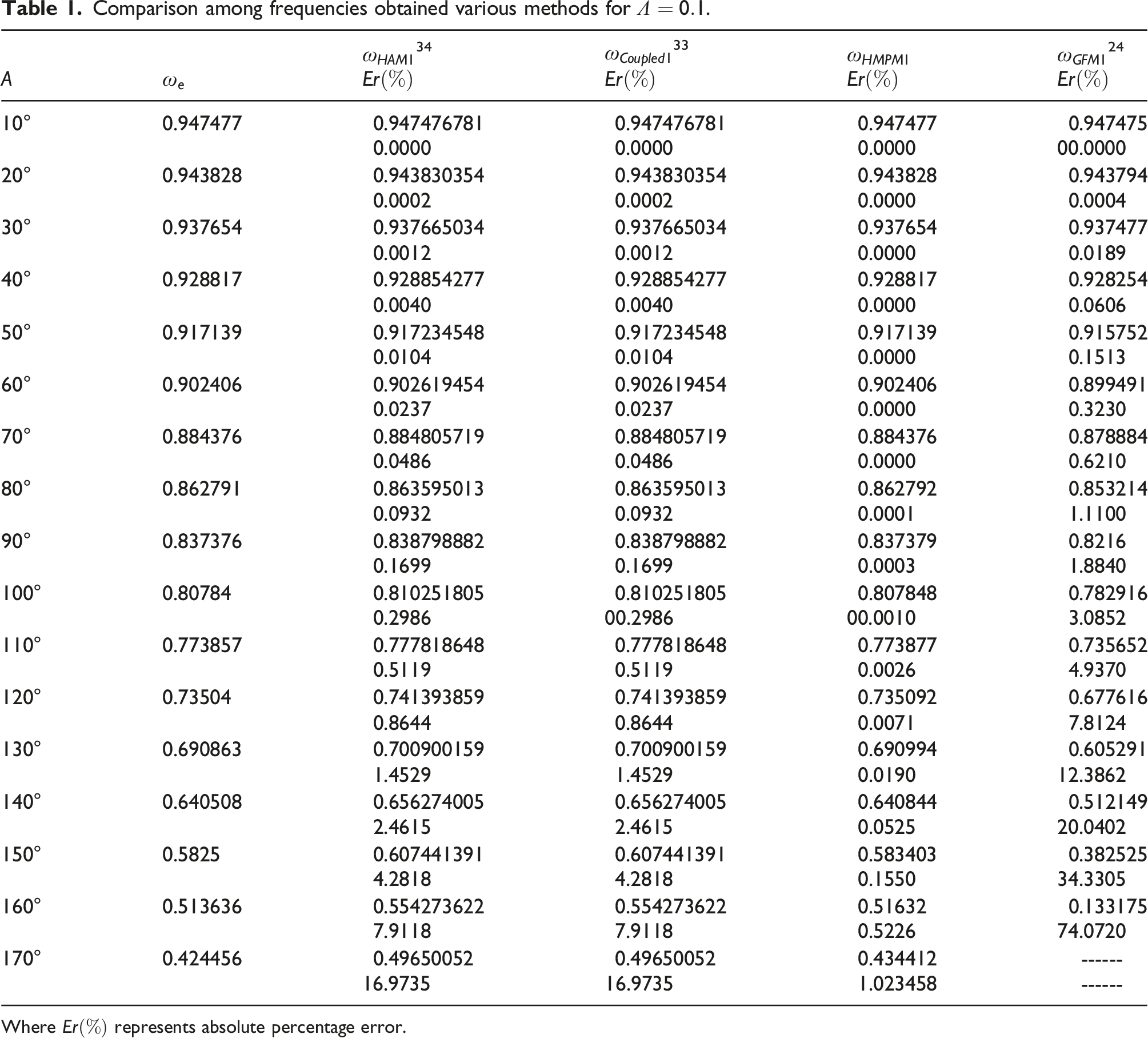
Where
Comparison among frequencies obtained various methods for Λ = 0.5.
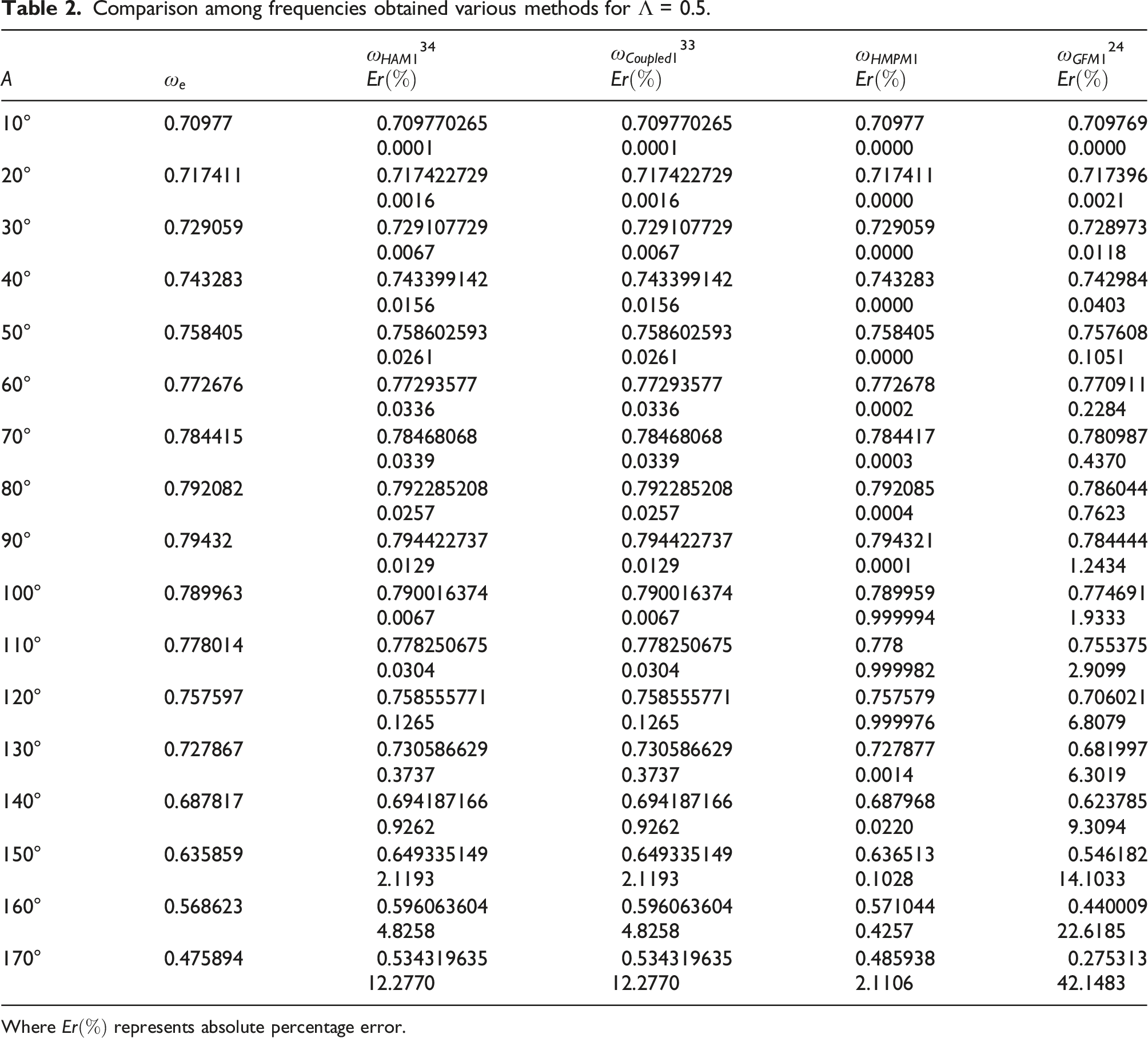
Where
Comparison among frequencies obtained various methods for Λ = 0.9.
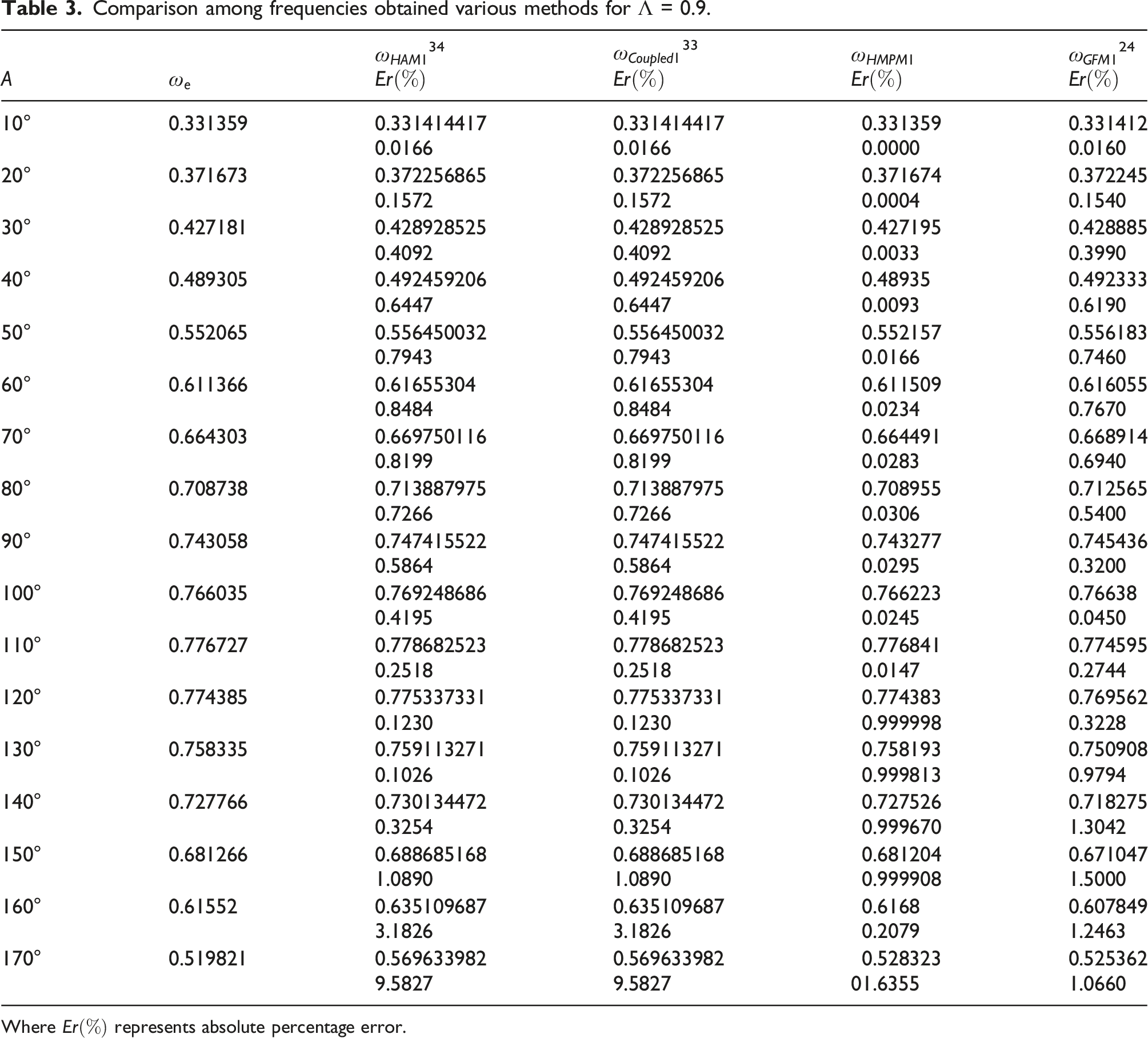
Where
Figures 2 and 3 visually corroborate these findings, illustrating the high accuracy of MHPM for larger amplitudes. The solutions obtained using MHPM closely align with exact solutions, demonstrating the method’s robustness and reliability. Comparison among the solutions obtained by the modified homotopy perturbation method (MHPM), gamma function method (GFM)
24
with exact solution for Comparison among the zeroth and first-order solutions obtained by the modified homotopy perturbation method (MHPM) with exact solution for Λ 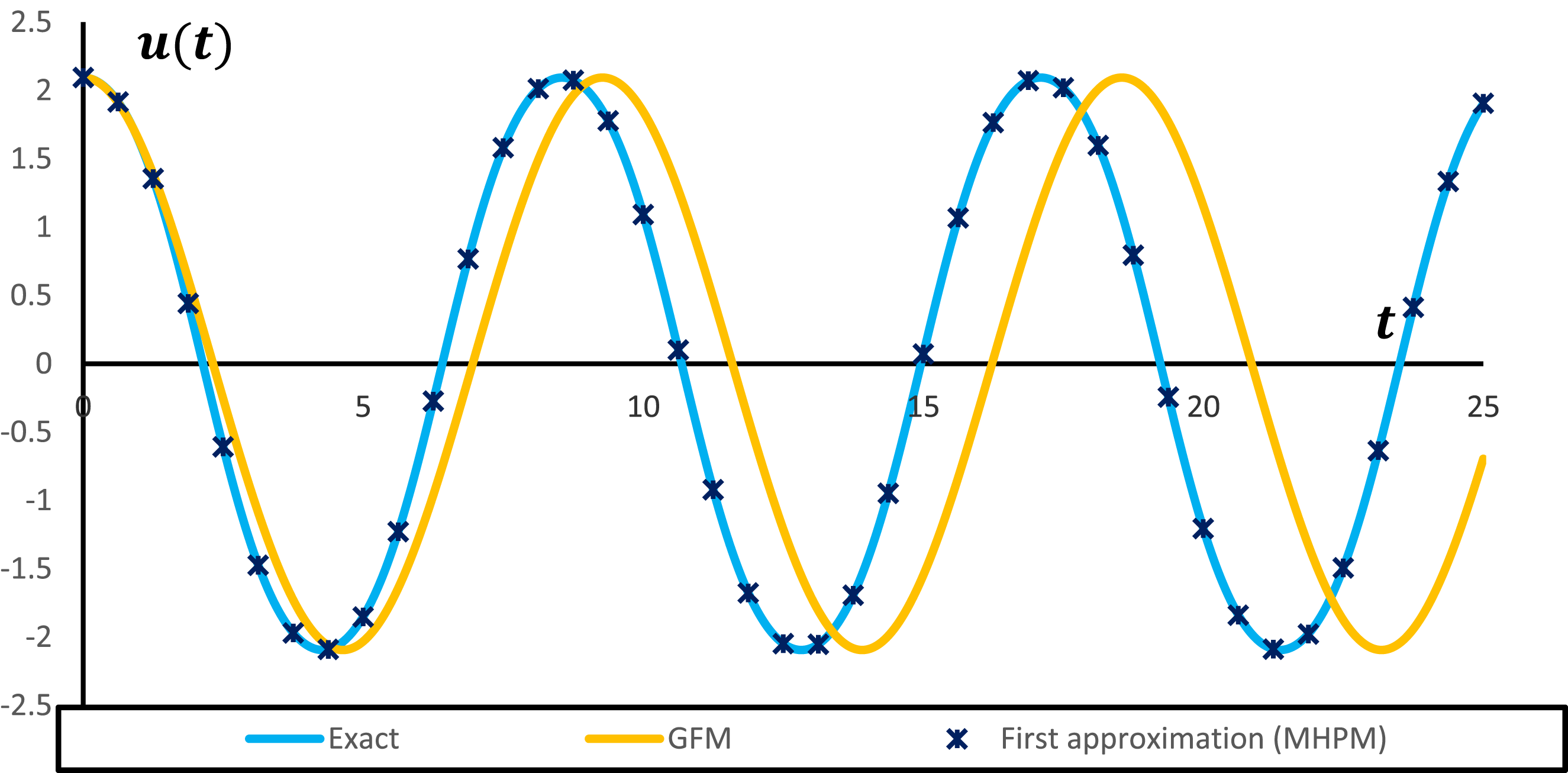
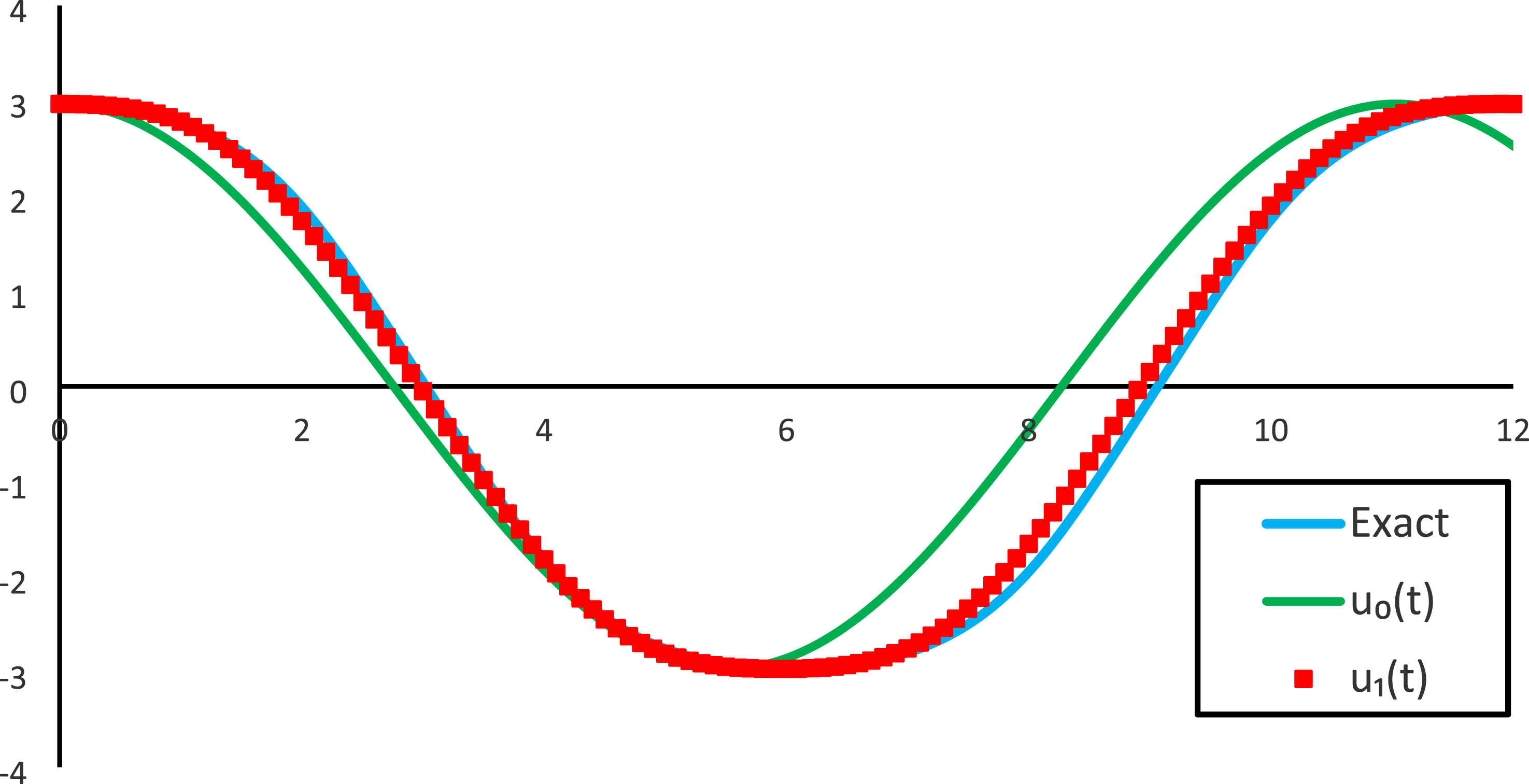
Figure 4 explores the dual effects of rotational speed Variation of first approximate period obtained by the modified homotopy perturbation method (MHPM) for various values of the parameter 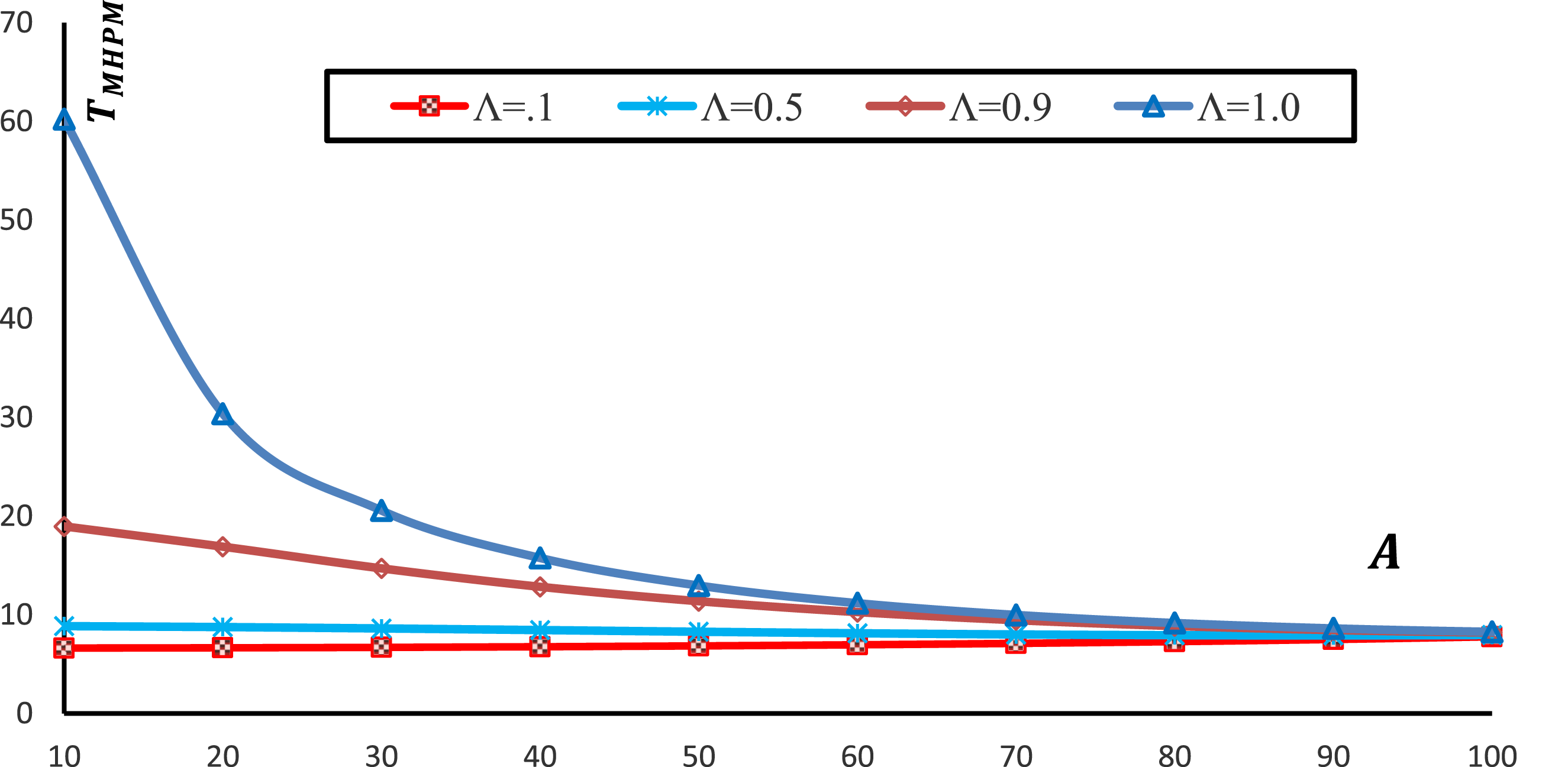
To further evaluate the performance of MHPM, the approximate period are compared to the exact period for the simple pendulum equation, given by
28

The first approximate period using MHPM is

By contrast, the second approximate period from the harmonic balance method (HBM) is
28


Similarly, the second approximate period from the standard homotopy perturbation method (HPM) is
29


These comparisons highlight the superior performance of MHPM, which achieves lower relative errors even in its first approximation compared to the higher-order approximations of HBM and HPM.
The results unequivocally demonstrate that MHPM provides a highly accurate and efficient framework for predicting the dynamics of pendulums, particularly under conditions of large deflection angles and for both high and low rotational speeds. By retaining the full sine function and employing a novel approach to approximations, MHPM overcomes the limitations of traditional methods, offering significant advancements in modeling complex nonlinear oscillatory systems.
Conclusion
In conclusion, this study introduces a novel modification to He’s homotopy perturbation method (HPM), resulting in the modified homotopy perturbation method (MHPM), used for analyzing the dynamic behavior of pendulums on rotating frames. The modification incorporates a novel time scaling and a reformulated power series expansion for the frequency, enabling the truncation of the infinite series solution at the first-order approximation while incorporating iterative refinements for higher-order terms. This enhanced formulation addresses the limitations of traditional methods, particularly in predicting accurate periods and frequencies for systems with large deflection angles. Unlike approaches that rely heavily on Taylor series expansions, which introduce significant errors as deflection angles approach higher degrees, MHPM retains the full sine function, ensuring high accuracy across various parameters. Comparative analyses with established methods, including the homotopy analysis method (HAM), 34 gamma function method (GFM), 24 harmonic balance method (HBM), 28 the coupled method, 33 and the classical homotopy perturbation method, 29 highlight the superiority of MHPM. Graphical analyses further validate the method’s precision, demonstrating close alignment with exact solutions and revealing critical insights into how parameters such as rotational speed and amplitude influence pendulum dynamics. The dual effects of rotational speed and amplitude on time period variation—an increase at low speeds and a decrease at higher speeds—offer a deeper understanding of the interplay between rotational effects and oscillatory behavior. The findings of this study establish MHPM as a robust and versatile analytical tool, capable of addressing complex nonlinear dynamical systems with enhanced accuracy and efficiency. Beyond its application to pendulum systems, the methodological framework of MHPM has the potential to be extended to other challenging problems in physics and engineering, paving the way for further advancements in the analytical modeling of nonlinear oscillations. By overcoming the limitations of prior methods, MHPM provides a significant contribution to the field, offering a reliable foundation for future research and practical applications in diverse domains.
Footnotes
Acknowledgments
The authors would like to express their gratitude to the reviewers for their insightful comments and suggestions, which significantly enhanced the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.