
Abstract
A critical hurdle in three-dimensional printing is the low printing accuracy. In particular, the deformation of the printed object on the receptor makes accurate printing impossible due to insufficient solvent evaporation. We address this challenge by establishing a Murray-like receptor to control the morphology of the printed object, which can be used for accurate printing through efficient residual energy absorption and active vibration attenuation. A fractal oscillator is established and He’s frequency formulation is used to reveal the fractal response of the Murray-like receptor, and an experiment was carried out to show that the receptor system can keep the printed object in good shape without any deformation.
Introduction
Accurate printing 1 is extremely important for nano/micro devices, where any small error can lead to inefficient operation and low reliability. Many precise devices that cannot be manufactured by traditional methods can now be accurately printed. For example, an ultrasensitive micro-electro-mechanical system2,3 can be printed. 4 Many new technologies have appeared for accurate printing, among which the machine vision technology5,6 has performed best, which can adjust the printing process according to any disturbance, but the vision-controlled printing process requires high requirement for accurate response to any disturbance, otherwise an inverse result might be obtained, making accurate printing impossible.
This paper focuses on a receptor system that has not received much attention. 7 Due to insufficient solvent evaporation, the printed object may not be fully solidified when received on the receptor plate, the viscoelastic printed object is easily deformed, and its printing accuracy is greatly affected. The solidification depends upon many factors including the paste’s rheological property,8,9 printing instability, 10 and environmental temperature, and printing process will affect printed object’s properties. 11
A spider can print its web accurately, because the ejecting jet is received on a soft web. 12 Inspired by the soft receptor, this paper suggests a Murray-like receptor system for controlling the printed object’s morphology.
Using a moving receptor with a rigid plate, the morphology of the printed object is greatly affected because it has a low modulus of elasticity before its full solidification, resulting in a significant reduction in printing accuracy. The receptor system presented in this paper can be used for accurate printing, it consists of a super hydrophilic surface and a fractal-like spring system, the former is used to absorb the residual solvent from the printed object, and the latter is used to absorb the energy of the printing jet.
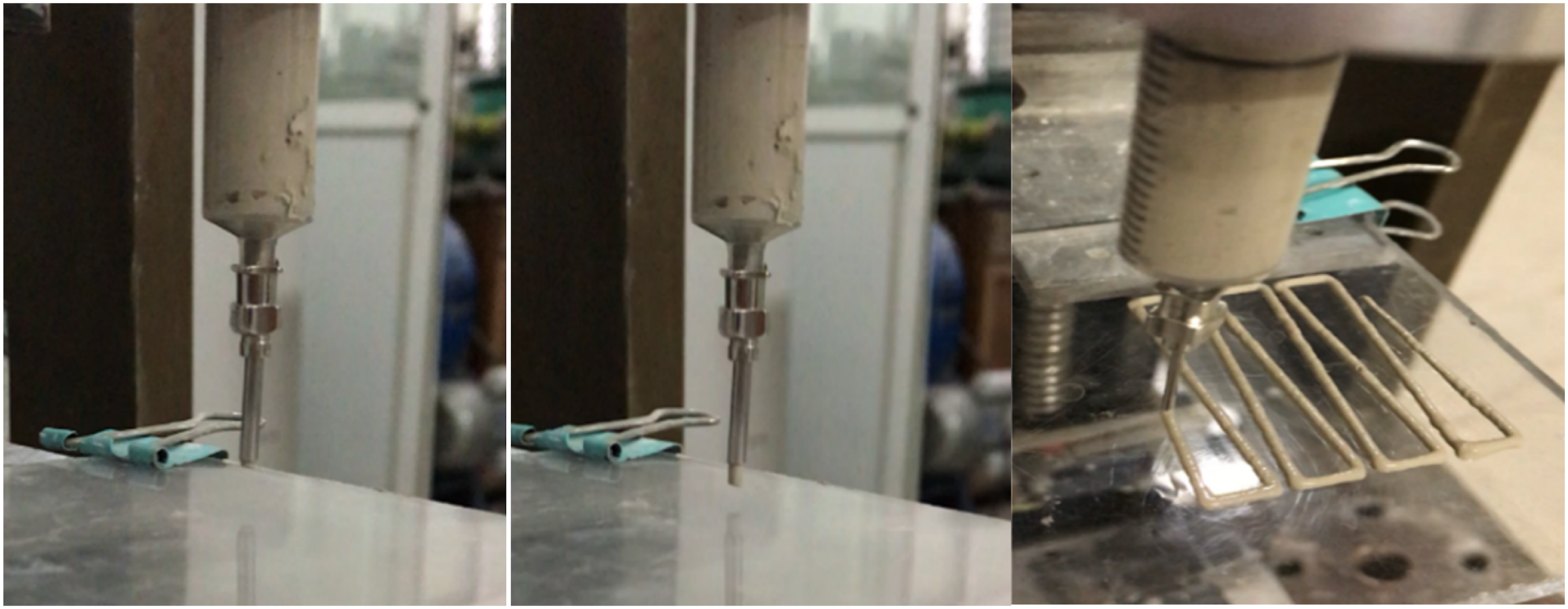
Figure 1 shows an extrusion-based 3D printing device, where the movable and rigid platform is used as a receptor. During the printing process, continuous filaments or droplets can be obtained, depending on the rheological properties of the printed slurry. In order to produce an accurate nano/micro printed object, its shape should not be changed during the printing process. Figure 2 shows the sequential printing process from the beginning to the final printed object. It is obvious that the printed object is not completely solidified when received on the receptor due to insufficient solvent evaporation. Extrusion-based 3D printing with solid receptor. The sequential printing process. The printed object is not completely solidified when received on the receptor. The nozzle diameter is 1.05 mm and the printing velocity is 4 mm/s.
A spider-inspired receptor system
Three-dimensional printing technology is now widely used for the precise fabrication of various advanced materials,13,14 especially miniaturized nano/micro devices such as N/MEMS devices15–17 and hydraulic cylinders 18 and lattice structure, 19 shedding a bright light on the next generation of advanced materials. The elements of nano/micro-electro-mechanical systems (N/MEMS) devices can now be precisely printed far beyond traditional manufacturing technology. However, during the printing process, the residual solvent on the printed object can cause the printed object to stick to the surface of the receptor. In addition, incomplete solidification makes the printed object easily deformable. Both cases should be avoided.
During the printing process, the jet gradually solidifies as the solvent evaporates. Due to the short receiving distance, the solvent evaporation is not complete and the print jet is received as a viscoelastic fluid with low rigidity, so it is easily deformed. Any small deformation of the printed object is unacceptable due to the high manufacturing accuracy required in nano/micro devices.
To solve this problem, an extremely slow printing process must be considered so that the solvent can be completely evaporated, but the gravity of the print jet will also greatly affect the printing accuracy regardless of the low printing efficiency. Instead of controlling the printing process, this paper proposes a soft receptor system inspired by the spider’s printing process.
The receptor is the last step in the printing process, and it should not be fall short of success for lack of a final effort.
Spider silk has an excellent internal geometric structure for macromolecular ordering, resulting in amazing properties
20
also due to its soft receiving nature. Inspired by the spider’s soft receptor manner, a Murray-like hierarchy is designed for the receptor system as shown in Figure 3, which consists of a super hydrophilic surface and a fractal-like spring system, the former is used to absorb the residual solvent on the printed object, and the latter is to absorb the energy of the printing jet. A Murray-like receptor system.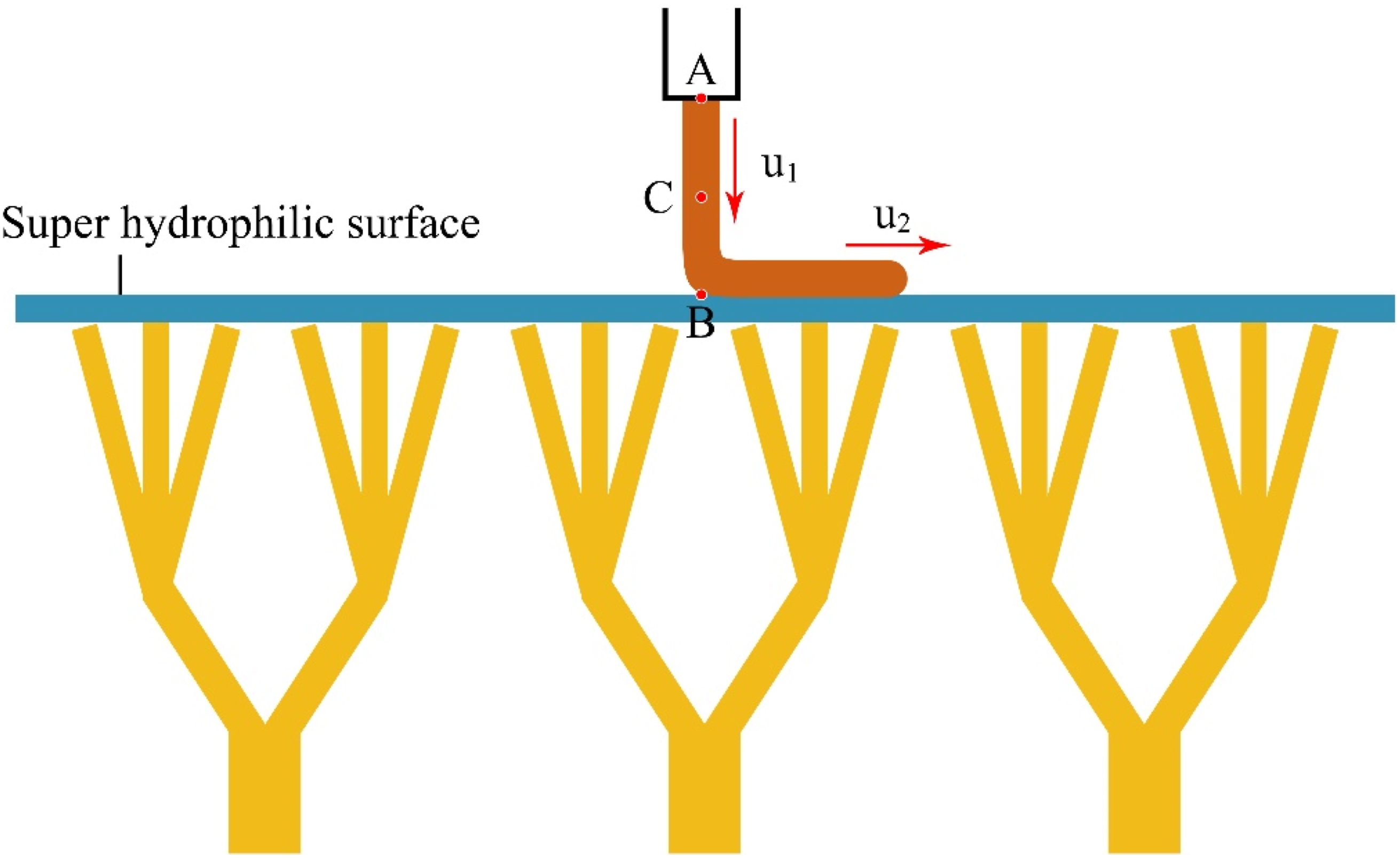
Before discussing the new soft receptor system, we first consider a gecko’s pad system.21–23 The animal can land on any surfaces with zero landing velocity, regardless of the landed surface’s morphology and the animal’s moving velocity. This special property is obtained by its Murray-like pad system, and it is extremely helpful to design the soft receptor system for the 3D printing process. The spring system in the soft receptor system is similar to that of the gecko effect, and the super hydrophilic surface has been widely used in textile engineering and can be fabricated by various ways.24–29
When the free end of the printing jet arrives at the super hydrophilic surface of the soft receptor system with a Murray-like structure, 30 the residual solvent can be absorbed immediately, and solidification process can be accelerated. On the other hand, due to different printing speeds and different printing spaces, the printed objects have different kinetic energies and potential energies, which must be absorbed by the Murray-like system consisting of hierarchical cascades. The first cascade can be a porous sponge, followed by springs with small elastic coefficients, and the last cascade locates springs with highest rigidity. This hierarchical system can absorb all the energy of the printed object, so that no damage or deformation occurs during the receiving process.
The soft system can be used as a good cushion, 21 and its vibration property can be modeled as a fractal oscillator as discussed in Refs. 31–3431–34; the Murray-like receptor system can be considered as a fractal space, so the vibration of the receptor is governed by a fractal oscillator which will be discussed later. We hope that the soft receptor vibrates smoothly with a low frequency, so that the printed object is completely solidified before a quarter period. The frequency-amplitude relationship is very important, and this paper applies He’s frequency formulation35,36 to figure out its relationship.
Fractal vibration of the soft receptor system
The 3D printing process is highly intricate, necessitating the integration of sophisticated technologies such as deep learning 37 and machine vision 38 to ensure precision and accuracy. Moreover, the printing process will also affect the low-frequency vibration properties of the printed absorbers39,40 and other properties affecting their applications.41,42
Improving the precision of the printing process through mathematical modeling is a challenging but valuable endeavor. The vibration of the printing jet plays a pivotal role in achieving accurate printing, and mathematical modeling can be utilized to identify its vibration characteristics and provide insights into the mechanisms governing vibration isolation. To fully leverage the potential of this approach, it is essential to address the challenges associated with integrating this type of analysis into the optimal design of the 3D printing process.
The present study considers the longitudinal vibration of the printing jet, as illustrated in Figure 3. Lou et al. 43 demonstrated that longitudinal vibration is a crucial factor in the fabrication of magnetorheological metamaterial (MRM) with negative regulation and low-frequency bandgaps. They also developed a mass-spring model to elucidate the underlying mechanism of negative regulation in MRM. Chen et al. 44 developed a kinetic model based on the principles of equivalent mass and equivalent stiffness. However, the aforementioned models did not take into account solvent evaporation. Therefore, a fractal-fractional vibration model45,46 is required to better understand the longitudinal wave attenuation that occurs during the printing process.
Assuming the mass of the printing jet between the nozzle and the receptor is m, the printing velocity is u1, and the receptor’s velocity is u2, the kinetic energy is


The fractal derivative is defined as47–49

The printing jet has the potential


Its governing equation is55,56



Equation (8) is called as the generalized Duffing equation.
57
Its initial conditions are

Using the two-scale transform47,48

We can convert equation (8) into the following differential equation

In order to find the fractal response of the soft receptor, we adopt He’s frequency formulation.35,36 Consider a nonlinear oscillator in the form




He’s frequency formulation35,36 is the simplest method to gain an insight into the vibration property of a nonlinear oscillator, and it has seen wide applications, mainly for frequency-amplitude relationship of a complex nonlinear vibration system,58–60 instability/periodic analysis,61–63 and fractal vibration systems.64,65 A complete review on the method is available in Ref. 66. According to equation (13), we have

For given parameters involved in equation (16), the frequency can be easily determined, and its approximate solution is


Figure 4 shows accuracy of the approximate solution for different values of parameters when σ = 1. Comparison of the approximate solutions with the exact ones for different values of parameters when σ = 1, where x and t are dimensionless displacement and time, respectively.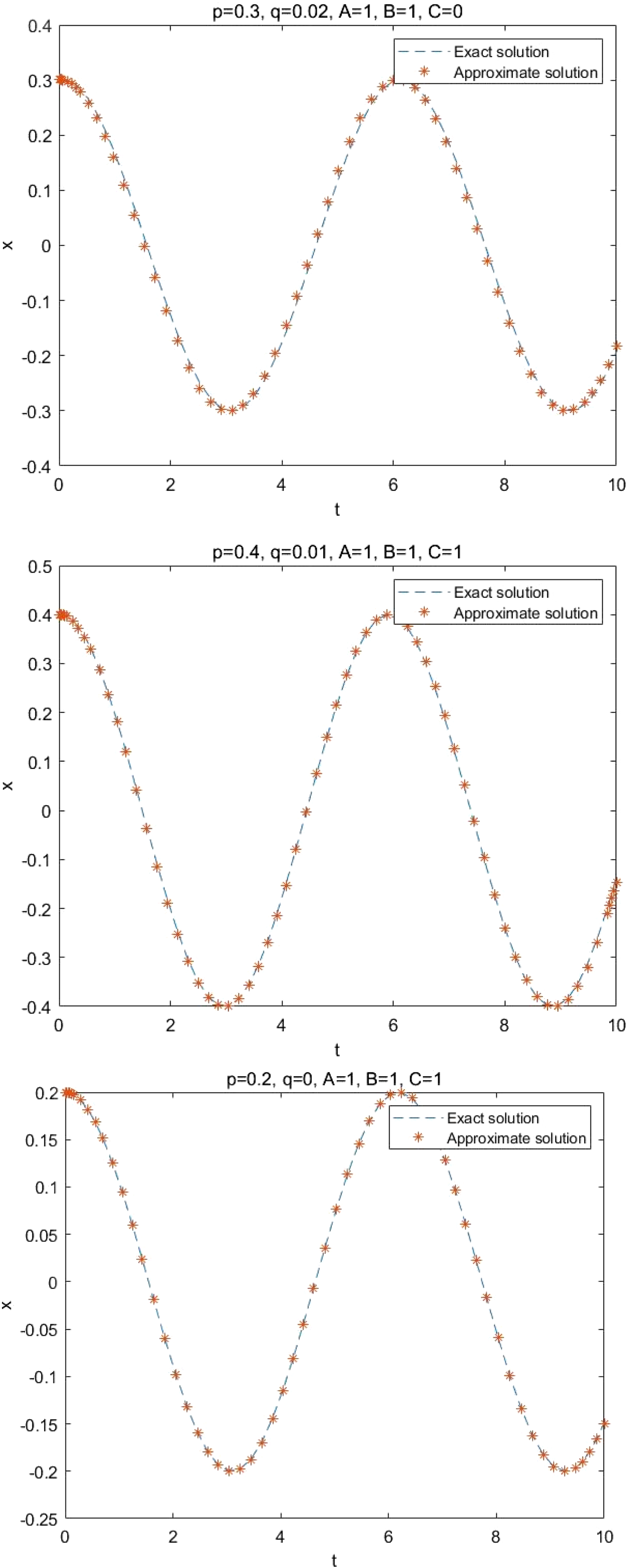
When B = C = 0, from equation (16), we have

This is exactly the same as that in Ref. 31
31
, showing the reliability of the method. The approximate solution is

The inertia force of the printing jet is

Equation (21) shows that the inertia force of the printing jet acting on the receptor depends not only on its vibration frequency but also time, especially when t→0, equation (21) has an extremely large inertia force for the case when σ < 1, this property affects greatly the receiving process of the printed object on the receptor. Due to the incomplete solvent evaporation, the received printed object is a viscoelastic fluid, which is easy to be deformed due to the inertial force. This finding enriches the fractal vibration theory.30,31
In order to avoid large impact of the inertia force on the printed object’s morphology, a soft receptor with Murray-like structure is designed in this paper.
Experimental design
A slurry comprising silicon carbide (SiC) and graphene is prepared for use in the 3D printing process. The volume ratio (vol.%) of each component of the SiC/graphene paste is as follows: 5% graphene, 30% SiC, 5% tetramethyl ammonium hydroxide aqueous (TMAH, 25% aqueous solution), 2% polyethylene glycol (PEG 200), 3% glycerol, and 55% deionized water. Subsequently, concentrated hydrochloric acid was employed to regulate the viscosity of the slurry, thereby rendering it suitable for printing.
The distance between the nozzle and the receptor is set at 2 mm throughout the printing process. The extrusion speed is set at 4 mm/s in the vertical direction, which is equivalent to the lateral movement of the receptor. Two distinct types of receptors are employed: a traditional hard-surface receptor and a soft, super hydrophilic alternative.
Figure 5 shows the illustrations for comparing the morphologies of the printed objects with and without the soft receptor system. It is obvious that the soft receptor system received the printed object with a good shape, while the sample with the traditional receptor saw an obvious deformation. Samples on different receptors. (a) Traditional receptor without the soft receptor system and (b) the soft receptor system.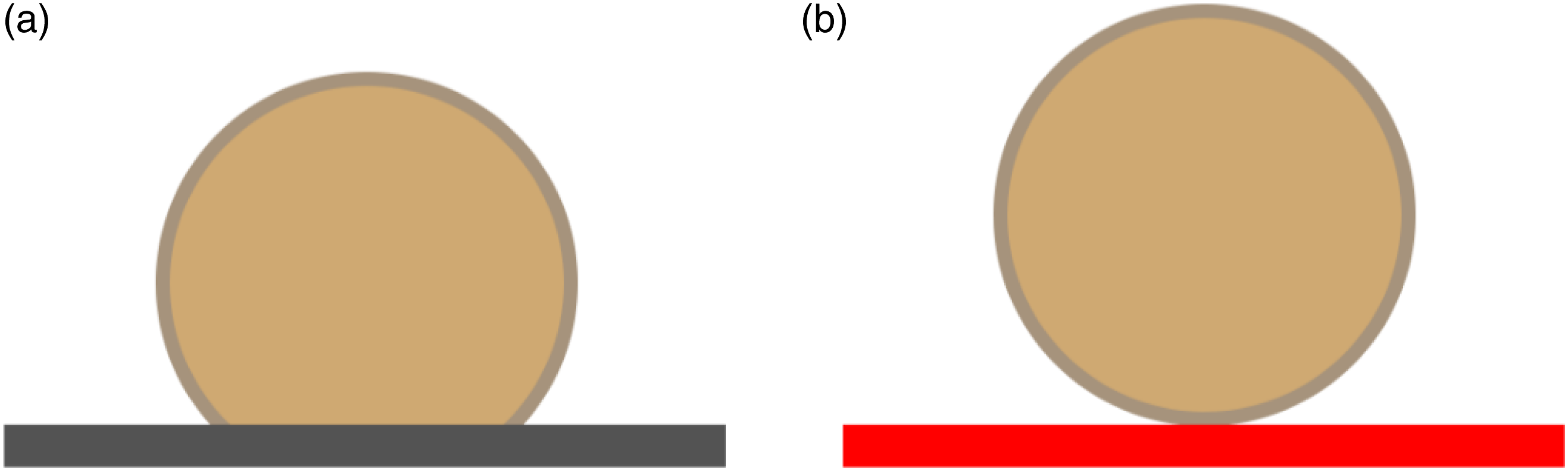
Discussion and conclusion
A Murray-like network always behaves extremely good in vibration attenuation. Here a Murray-like receptor system is designed for a 3D printing system for controlling the printed object’s morphology. Unlike a moving receptor with a rigid plate, which will greatly affect the morphology of the printed objects due to the insufficient solvent evaporation, as a result, the printing accuracy will be deteriorated. The receptor system presented in this paper, which consists of a super hydrophilic surface and a fractal-like spring system, can be used for exact printing. The super hydrophilic surface is used to absorb the residual solvent on the printed object, while a fractal-like spring system is to absorb the energy of the printing jet.
This paper, for the first time ever, suggests a fractal-like soft receptor system for exact printing of nano/micro devices, which can also be used for a packaging system.67–69 When a moving object, for example, an egg, hits the soft receptor system, a good vibration absorption will be provided regardless of the moving object’s velocity and height. The soft receptor system can keep the printed object in a good shape without any deformation, see Figure 5(b).
The soft receptor system can also be realized by using a porous medium with a hierarchical porous structure, and an exact printing process can help improve the bond stress-slip relationship as well. 70
Footnotes
Acknowledgments
The author wishes to acknowledge the financial support for this work from college of mechanical engineering, Baoji University of Arts and Sciences.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.