
Abstract
Numerical methods are widely used in the area of nonlinear problems including differential equations. There are various integral transformations to study the frequency formulations and nonlinear solutions, but there are many types of transformations that make it difficult to choose during use. Recently, Professor He proposed a general integral transformation, which is a generalization of the Laplace transform, Fourier transform, and other transformations existing in the literature. The unification can provide more opportunities for expanding research on physical phenomena and engineering problems. This new transformation coupled with the variational iteration method is highly effective for various nonlinear problems and offers a new window for wide applications. A new scheme of correction functional is obtained and a numerical example is taken to support the primary findings. The Lagrange multiplier is easily obtained and an algorithm is developed. Taking an oscillator with coordinate-dependent mass as an example to illustrate that the approximate solution is quickly obtained by the final algorithm. A high approximate nonlinear frequency and the solution are solved and the graphical representation is given. It will be a challenge and future trend for the nonlinear research.
Keywords
Introduction
Naturally, most problems are essentially nonlinear and researchers have found many mathematical methods to solve these problems in the areas of engineering, science, and technology.1,2 Various analytical and numerical methods are used to seek the frequency formulations and nonlinear solutions of nonlinear oscillators that could be used in processes of engineering research and physical experiments. Numerous jobs in these areas display the importance of mathematical techniques which induce permanent interest in solving corresponding differential equations.3–6 Numerical or analytical analysis was conducted on the dynamic characteristics of nonlinear oscillators, while analytical methods cannot be successfully applied to some complex nonlinear models, for example, displacement phase transitions and dynamic soft-mode behavior. Some require non-perturbation theories or perturbation methods.7–11 In recent years, alternative analytical techniques have appeared in recent advances, such as the Taylor series method,12,13 bisection method, 14 Newton-Raphson method, 15 and He’s frequency formula method. 16 It is worth putting out that notable results for the Hamiltonian with coordinate-dependent mass in semi-classical theory 17 and the variational iteration method for numerical purposes with a high degree of accuracy as its reliability and validity.18–20
Integral transformation is a method of transforming one function into another by integration, and this transformation is one-to-one. It is a practical mathematical technique for solving a lot of issues in both mathematical theory and applied mathematics. Traditionally, the integral transformation is commonly applied to solve linear and nonlinear models and has been proven to be reliable and efficient for a wide variety of scientific applications.21,22 As is well known, the integral transformation is a rapidly developing branch of mathematics that has become a powerful method in many fields of science and engineering. Many researchers use it to study nonlinear problems coupled with analytical methods like the homotopy perturbation method 23 or the variational iteration method.24,25 As choosing different forms will result in different transformations, there are many types of transformations among which Fourier transform and Laplace transform are the most important ones. Many alternative integral transformations have been appeared in the literature, such as the Elzaki transform, 26 Sumudu transform, 27 and so on.28–33 In the last few years, some researchers have attempted to extend different forms of integral transformations to a universal form. This is because this normalization makes integral transformations very fascinating. 34 Hossein proposed an integral transform that contains the class of Laplace transforms. 35 He et al. introduced a generalized integral transform that not only includes the category of Laplace transform but also holds the properties of the Fourier transform. 36 This unification can be seen as a generalization of the Laplace transform, the Fourier transform, and other transformations.
Variational iteration method and integral transformation method are powerful mathematical tools for solving complex problems. When the variational iteration method and the integral transformation method are combined, they can jointly solve some complex problems, such as nonlinear partial differential equations, optimization control problems, and so on. 37 Through integral transformation, the original problem can be transformed into a more manageable form, and then the solution of the problem may be gradually approximated by the variational iteration method. This combination makes previously difficult problems solvable and improves the accuracy and efficiency of the solution. Inspired by the newly defined transformation, we will find the analytical solution of nonlinear problems using the variational iterative method coupled with the generalized integral transformation. Many mathematical models of physical and engineering phenomena involve differential or integral equations. The combination of variational iteration method and integral transformation method can be used to solve the numerical solutions of these equations, thereby helping us to have a deeper understanding and description of the phenomena we encounter or study. In this work, a new iterative scheme is obtained and used for solving a nonlinear oscillator corresponding coordinate-dependent mass. This method is not only simple and easy to operate, but also provides a totally new approach for its widespread applications.
Materials and technique
In this section, the generalized integral transformation and other involving transformations are discussed. Let


The Sumudu transform is defined as

The Aboodh transformation is defined as

Generally, an integral transformation can be written as

The normalization of integral transformations is an important mathematical process that involves unifying them into a standardized or universal form for ease of application and analysis. In practical applications, the generalization of integral transformations also helps to simplify numerical calculations, making it possible to calculate various integral transformations more efficiently and to solve complex mathematical problems.
He et al. proposed a generalized integral transformation as follows
36

By definition, we can calculate the integral transformation of basic elementary functions, such as
Then we discuss the convolution theorem of the generalized integral transformation. Now we prove the theorem with the help of

According to the definition of the generalized integral transformation, it yields The claim is proved. It is easy to find a relationship between the generalized transformation and other various transformations. It can encompass different transforms that belong to the Laplace integral transformation category but also displays characteristics of the Fourier integral transformation. For a constant coefficient differential equation, the Laplace and all integral transformations have the same solution, that is, the choice of integral transformation has no effect on the solution of the constant coefficient differential equations. However, the choice of integral transformation becomes particularly important for a variable coefficient differential equation. The unification of integral transformations provides convenience for solving general differential equations. By combining unified integral transformation with homotopy perturbation method, variational iteration method, etc., nonlinear problems and fractional differential equations can be solved faster, which will have a significant impact on improving research efficiency and expanding research scope.




Application in solving a nonlinear oscillator
This section is used to present the generalized integral transformation to study nonlinear oscillators with initial values.
Consider a general form of the nonlinear oscillator as

Equation (4) can be re-written as

Based on the variational iteration method, the correction iteration for equation (9) could be presented as28,29

Among the function,
A lot of researchers analyzed the way to achieve a value of the multiplier. Now applying the generalized integral transformation on both sides of equation (10), the correction functional is obtained as follows

Using the convolution theorem, equation (11) becomes


Then we have
Through the above process, the Lagrange multiplier is easy to obtain by means of the generalized integral transformation. This is the same as obtained in the literature.38,39 Equation (12) can be transformed into the following form

Now we discuss the conditions for the convergence of the algorithm and prove the convergence theorem.
Under the basic thinking of the variational iteration method, it is a nonlinear contractive mapping such that As The claim is proved.
Numerical example
In this section, we will take a nonlinear oscillator as an example to seek an approximate solution by the generalized integral transformation coupled with the variational iteration method.
A connection between the physical model and the nonlinear oscillator with coordinate-dependent mass has already been established and the corresponding differential equation has the following form.36,37


Equation (15) could describe phase transitions in physics, while it isn’t easy to be studied by the general method for such a complex system. Let

Its solution is

According to the conditions

This solution provides a perfect tool to describe the phase diagram of the system for further analysis. As shown in Figure 1, there are bounded solutions that depend on parameters of equation (15). The smaller the value of Phase portraits of equation (15) depending on various values of A. (a) a = 0.1; (b) a = 1.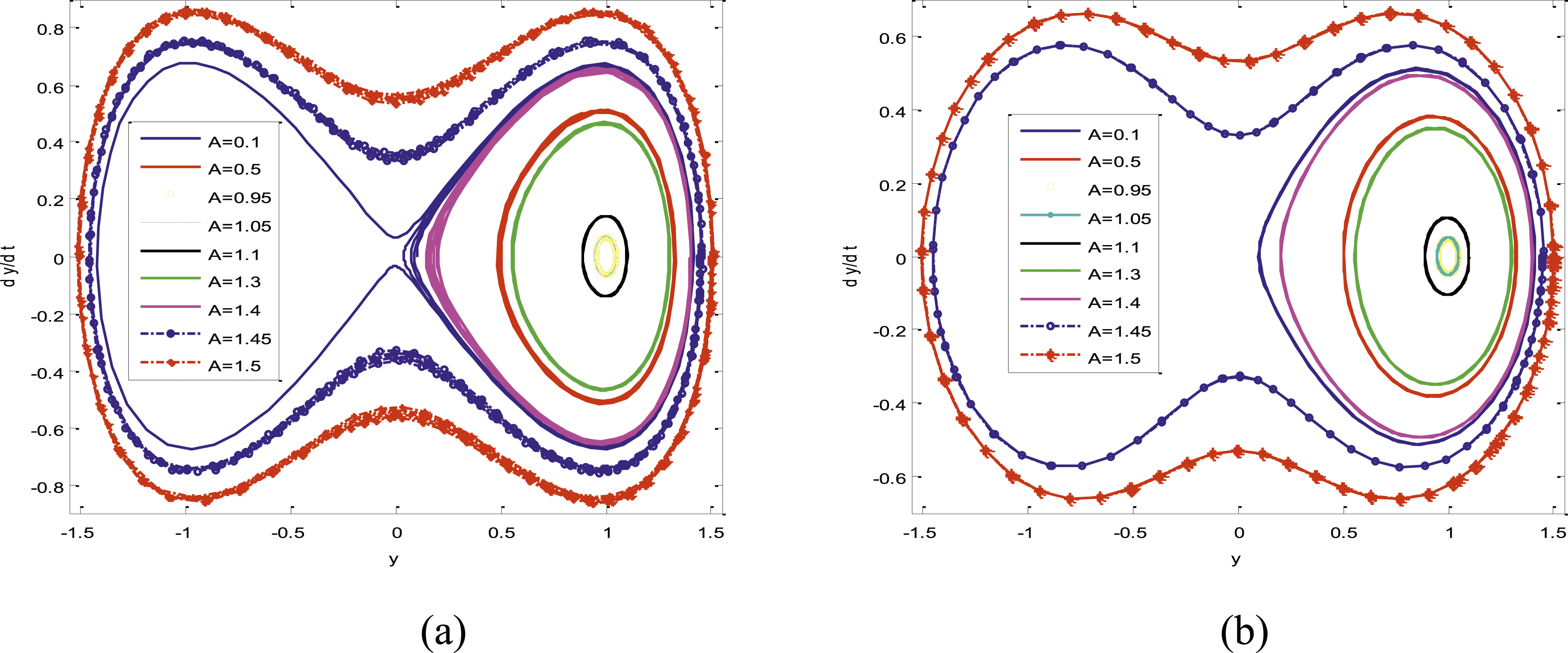
Many works have been made toward seeking different numerical and analytical techniques to calculate higher precision approximate frequencies and solutions. We could find its approximate oscillatory period that corresponds to the periodic motion of the oscillator by the aforementioned generalized integral transformation.
The iteration formula of equation (15) is displayed as follows


Using the initial conditions, let


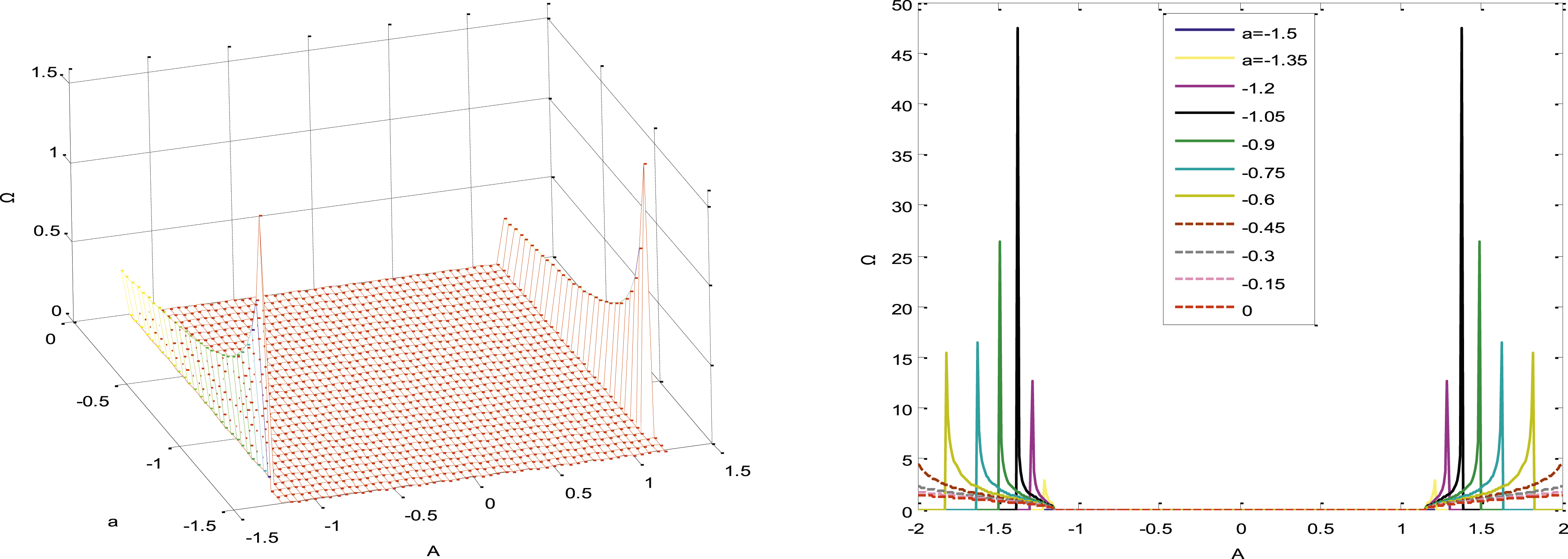
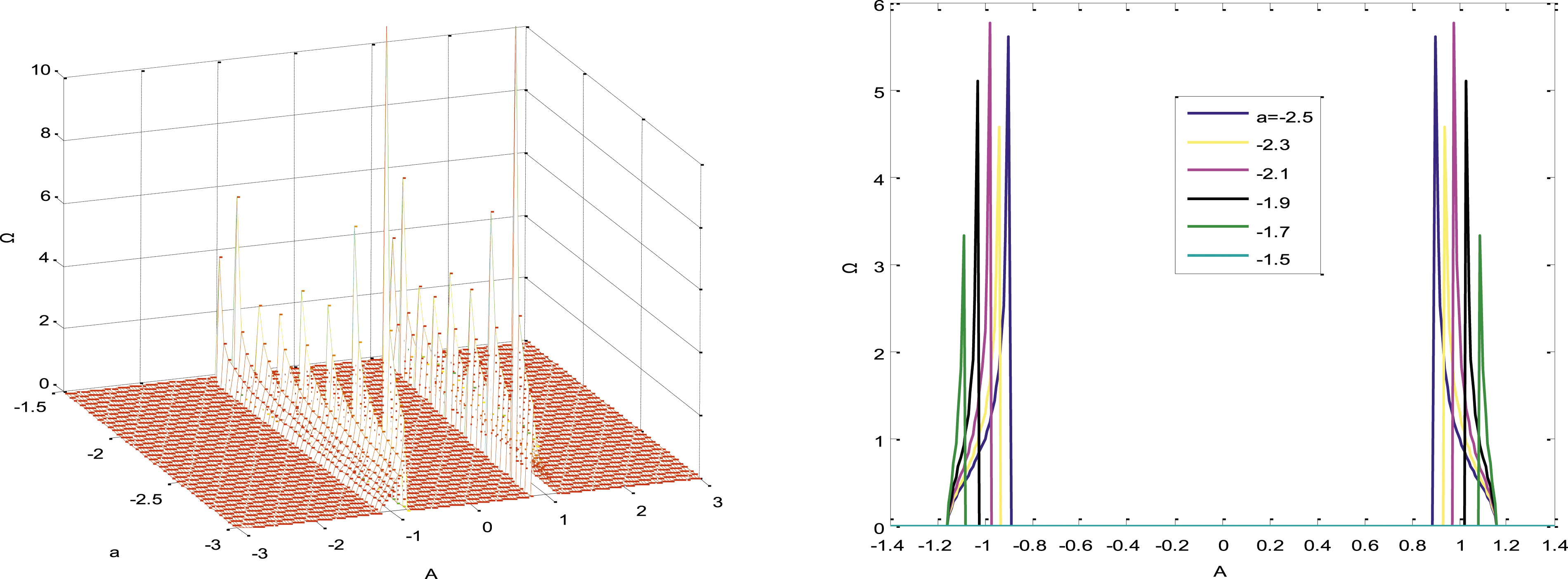
Therefore, the first-order approximate solution of equation (15) could be obtained by the inverse integral transformation on equation (21) The solution of equation (24) when a>0. The solution of equation (24) when −1.5<a<0. The solution of equation (24) when a< −1.5.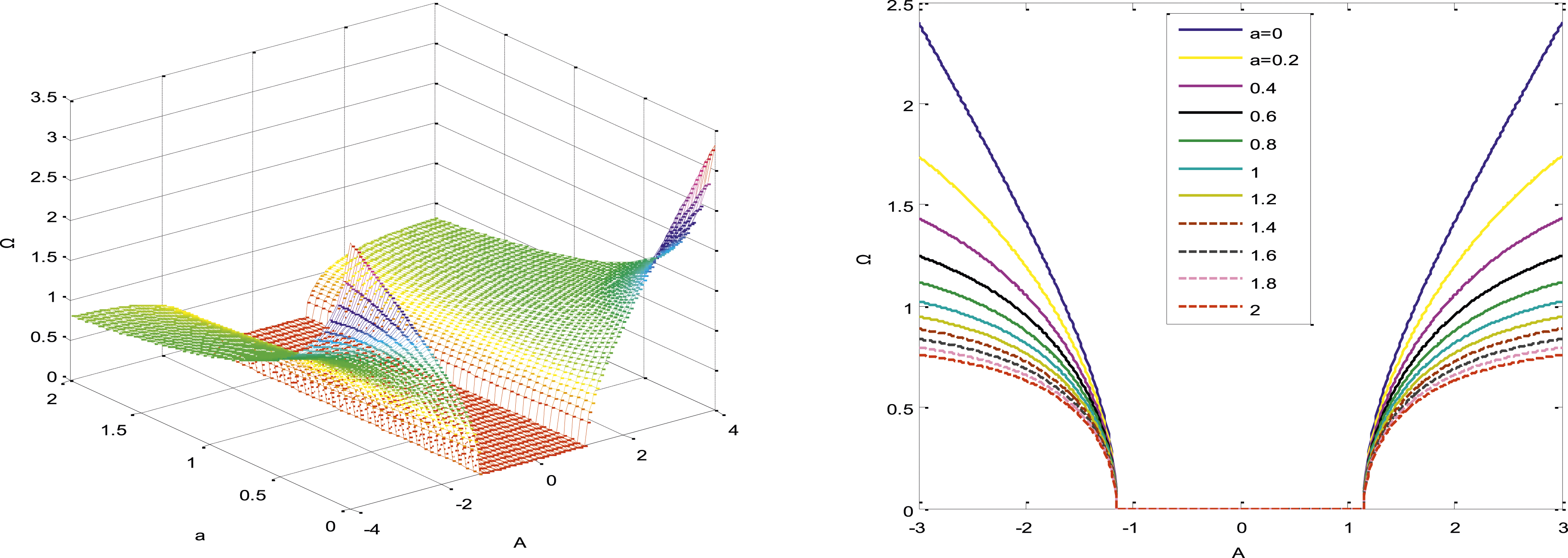



Therefore, the approximate solution of equation (15) is

It is worth mentioning that an analytical expression with arbitrary accuracy can be obtained by repeating the above process. Combining the new integral transformation with the variational iteration method makes solving nonlinear oscillator problems more convenient and effective. And the approximate solution obtained in one iteration already has high accuracy.
Discussion and conclusion
In this paper, an algorithm is introduced using the generalized integral transform involving the variational iteration method to study the nonlinear oscillation. A new generalized integral transform has introduced and this unification improves the unity and consistency of the analysis, making comparison and conversion between different methods more convenient, and also helps to form a standardized processing flow. However, for certain specific problems, standardized form may not be optimal and may even lead to erroneous analysis results, which we need to investigate further.
The coupled use of the new integral transformation and the variational iteration method makes it more convenient and efficient to solve the problem of nonlinear oscillators. The Lagrange multiplier is easily obtained and an algorithm is developed. Taking an oscillator with coordinate-dependent mass as an example to illustrate that the approximate solution is quickly obtained by the final algorithm. A high approximate nonlinear frequency and solution are solved and given the graphical depiction. The obtained theory must be extended to other nonlinear systems as well, which could be found through theoretical analysis and numerical simulation.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.