
Abstract
The wide applicability of a nonlinear oscillator is the main reason why it has gained so much attention from mathematicians and scientists, while it is difficult to be solved both numerically and theoretically. Variational iteration method is one of the numerical approaches which are used to investigate these nonlinear systems. In this paper, we present a nonlinear oscillator arising in a micro-electromechanical system as an example and derive its analytical solution by He’s frequency formula method and variational iteration method coupled with a new general integral transformation. The Lagrange multiplier is formulated and the new iterative format for the correction functional of the variational iteration method is given by the general integral transformation. The approximate nonlinear frequencies are achieved by this new technique and compared with the numerical ones obtained by the Runge–Kutta method. The new general integral transformation has the same essential qualities as those for Laplace and Fourier transform, and it becomes a promising tool to nonlinear problems when coupled with the variational iteration method.
Keywords
Introduction
Nonlinear systems are ubiquitous in nature, and the laws controlling their behaviors are fundamental in engineering machinery and transportation equipment.1–4 These systems can exhibit bifurcations, chaos, counterintuitive, or unexpected dynamic behaviors that most researchers are interested in.5–7 The process of vibration is the energy conversion process between the kinetic energy and potential energies of the system. The solutions of nonlinear vibration equations can provide deep insights into the essence of general relationships applicable not only to physical phenomena, chemical systems, and geophysical systems but also to biological systems, so it is very important to study the analytical or approximate solutions.
The behaviors of complex systems are usually modeled by nonlinear dynamical systems, while lots of nonlinear equations cannot be precisely solved. In engineering applications, a simple calculation is always required and how to solve a nonlinear equation quickly is important. Therefore, identifying approximate solutions that meet certain accuracy demands is a main task, and many efforts have been made toward the studying of numerical analysis methods. There exist many analytical techniques for discussing the characteristics of nonlinear systems, for example, He’s frequency formula method,8,9 the homotopy analysis method,10,11 the homotopy perturbation method,12–17 Taylor series method,18,19 the bisection method, 20 and Newton–Raphson method.21–24 The variational iteration method was used by many researchers to solve linear and nonlinear models and has been proved to be reliable and efficient for a wide variety of scientific applications.25,26 It can be employed for numerical computations with a high degree of accuracy as its reliability and validity,27,28 where the identification of Lagrange multiplier was difficult. The series solution obtained by the variational iteration method converges rapidly, but the calculation is complex in most issues.
Abbasbandy successfully applied He’s homotopy perturbation method to compute Laplace transform. 29 Watugala employed the Sumudu transformation to investigate differential equations. 30 Basit et al. proposed the formable transform to study a nonlinear oscillator.31–34 Farooq et al. have reported progress in understanding the Cattaneo–Christov heat and mass fluxes through a nonlinear stretching cylinder. 35 Rehman et al. studied modified Laplace transformation based on the variational iteration method for the mechanical vibrations. 36 Burqan et al. proposed a novel approach for obtaining precise solutions of the time-fractional Navier–Stokes equation utilizing the Laplace transform and power series method. 37 Inspired by the newly defined generalized integral transformation, 38 we attempt to combine the variational iteration method with this integral transformation to investigate the numerical solutions of nonlinear oscillators. This iteration scheme integrates several existing iterative methods and has the potential to generate numerous new iteration schemes. We will take the micro-electromechanical system (MEMS) as an example for detailed explanation.
In recent decades, the MEMS has numerous applications in engineering research as a tiny mechanical module driven by electricity. It possesses several attractive advantages that can make up for the shortcomings of traditional electronic components, including high intelligence, low energy consumption, small size, and high integration. 39 So far, there are a large number of literature studies on the dynamic characteristic analysis of MEMS models. Tian et al. established a fractal MEMS system.40,41 He proposed a variational principle for both analytical and numerical analyses of the MEMS system. 42
Consider the following nonlinear oscillator arising in a MEMS system

As shown in Figure 1, it can be described the movement of the wire as a point mass. Here y is the dimensionless distance, MEMS system with a current-carrying wire.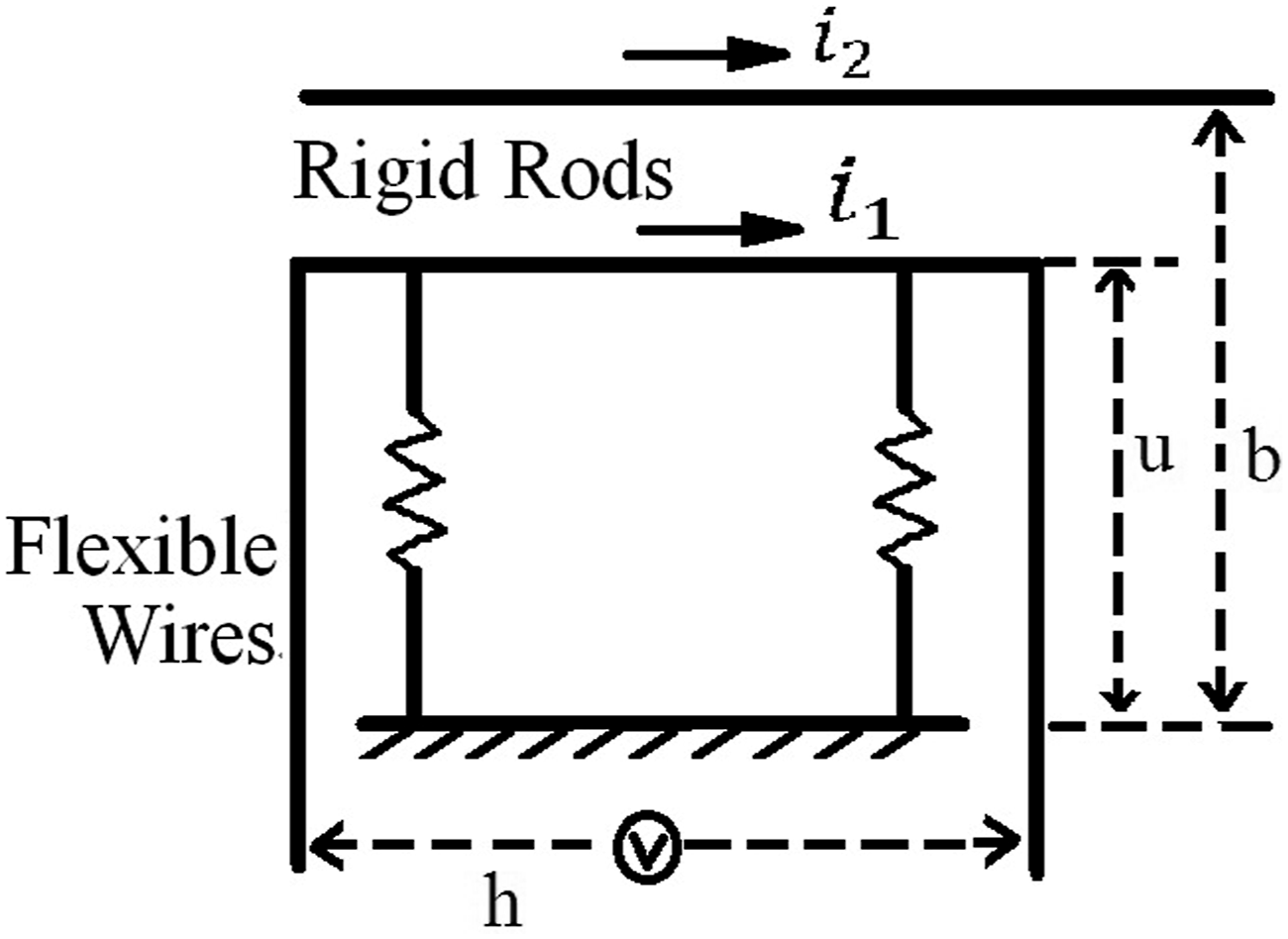
Seeking out a high-precision solution for an MEMS model is an extremely important and meaningful research project. In this work, high-precision solutions are obtained by He’s frequency formula method and a new general integral transformation method, both of which are efficient and easy to operate.
A frequency formula method
He’s frequency formula has been considered as a simple and accurate frequency–amplitude expression based on an ancient Chinese mathematical algorithm in which the frequency–amplitude of various nonlinear oscillators was found.
A general nonlinear oscillator has the following form:

He’s frequency formula is as follows:

The frequency formula method is mainly used to find the frequency form of differential equations with non-zero initial conditions. We attempt to convert the zero initial conditions into non-zero initial conditions by assuming


Equation (4) becomes as follows:

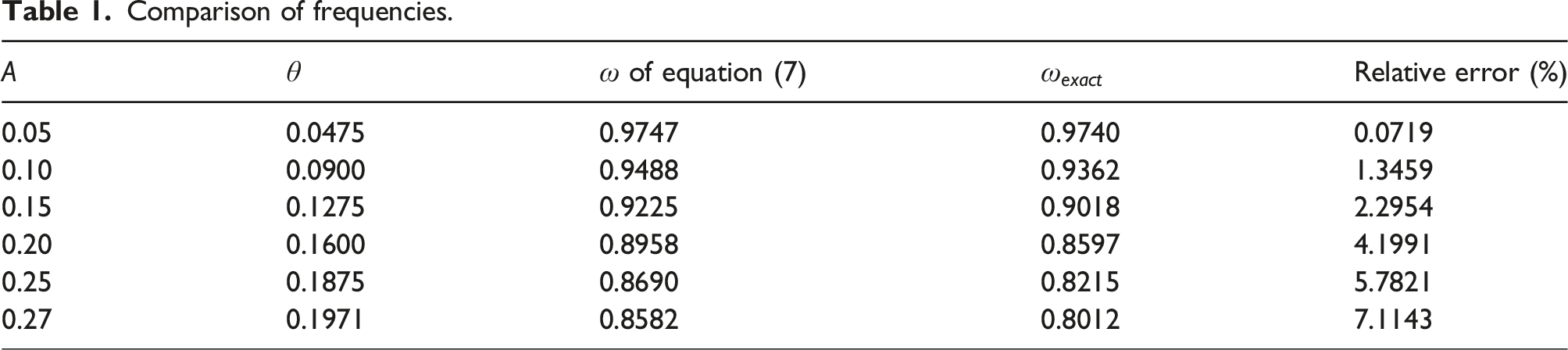
He’s frequency formula

Comparison of frequencies.
The approximate solution of the MEMS system is as follows:
As
A new general integral transform
Recently, the integral transform has been widely used in numerical simulation of its fast convergence and simple operation. It has great practical implications in different real-life challenges of engineering, such as electrical engineering, industrial engineering, mechanical engineering, and civil engineering. There exist various integral transforms used in mathematical theory and for solving differential equations, including the Laplace transform and Fourier transform. In some cases, choosing an appropriate integration transformation can make the analysis simple. The choice of transform becomes much importance when we study different problems. He et al. proposed a general integral transformation with others being its special cases to overcome the problem of how to choose a suitable one. 38 It can be used for various nonlinear problems and opens a new window for studying nonlinear science.
He’s integral transformation of an input function 
The Laplace transformation and Fourier transformation are defined, respectively, as follows:

It is easy to find a relationship between the generalized transformation and other various transformations. It not only encompasses different transforms that belong to the Laplace integral transformation category but also displays characteristics of the Fourier integral transformation. Especially, equation (9) becomes the Fareeha transform that contains the characteristics of Fourier and Laplace transform when
He’s integral transformation summarizes various defined integral transformations together and has the general properties of transformation, such as existence and linearity. It represents integral transformations in a universal form to facilitate solving different nonlinear equations.
A general nonlinear oscillator that could be modeled as a second-order nonlinear differential equation is in the following form:
Equation (12) can be re-written as follows:

By the variational iteration method, the correction iteration for equation (13) can be presented as follows25–28:
Then the solution of equation (12) is structured as
Applying He’s integral transformation on both sides of equation (14), the correction functional could be written as follows:
Based on the variational theory and taking the variation on both sides of equation (15), it yields the following equation:

It can be found that by using the integral transformation it is easy to obtain the Lagrange multiplier. Then, we employ this method to solve nonlinear systems with zero initial conditions.
By employing equation (17), we can rewrite equation (15) as follows:
Consider the following integral:
After using initial conditions and employing equation (19), equation (18) has following the form:

The form of the iteration formula of equation (1) is displayed as follows:

Applying inverse integral transformation, we have the following equation:
For higher-order solution, use the truncated Taylor series 
For getting an approximate nonlinear frequency, substitute equation (23) into equation (24)
Therefore, the second-order approximate solution of equation (1) could be achieved by the inverse He’s integral transformation on equation (25)

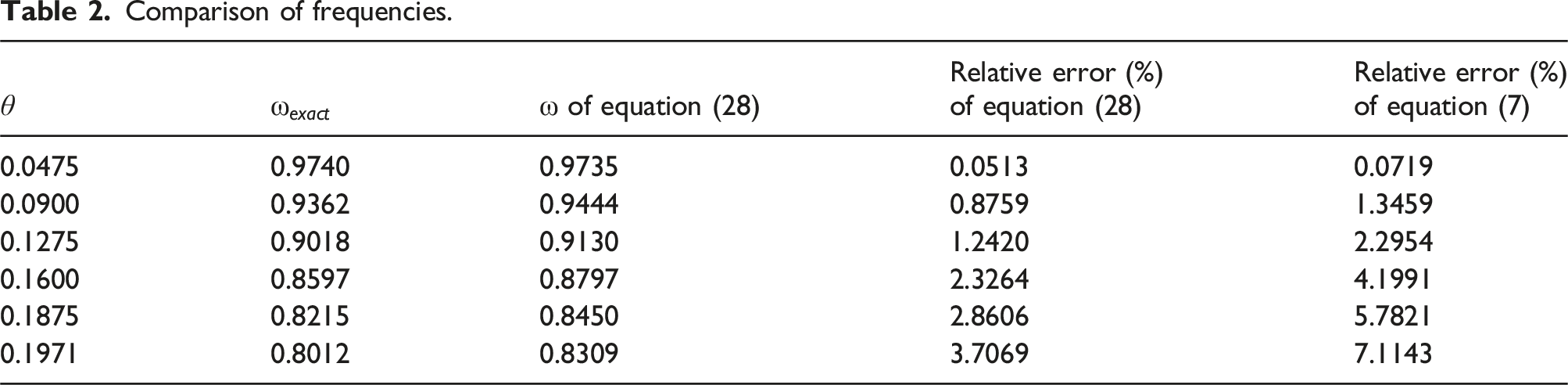
Thus the approximate frequency is obtained as follows:
Comparison of frequencies.
The approximate solution of equation (1) is as follows:
We draw pictures to consider the results for various values by equation (29). Figure 2 illustrates that the approximate solution by He’s integral transformation coupled with the variational iteration method has a good agreement with the mathematical solution by the fourth-order Runge–Kutta method. The Runge–Kutta method is a widely used high-precision one-step algorithm in engineering for numerically solving differential equations. Due to its high accuracy and the measures taken to suppress errors, He’s integral transformation coupled with the variational iteration method is an important iterative method for solving nonlinear ordinary differential equations. We may also decrease the error by getting a higher-order approximate solution to repeat the above process of equation (24). The convergence of the solution depends on the continuity of the integrand function, that is to say, we can obtain analytical solutions with arbitrary accuracy.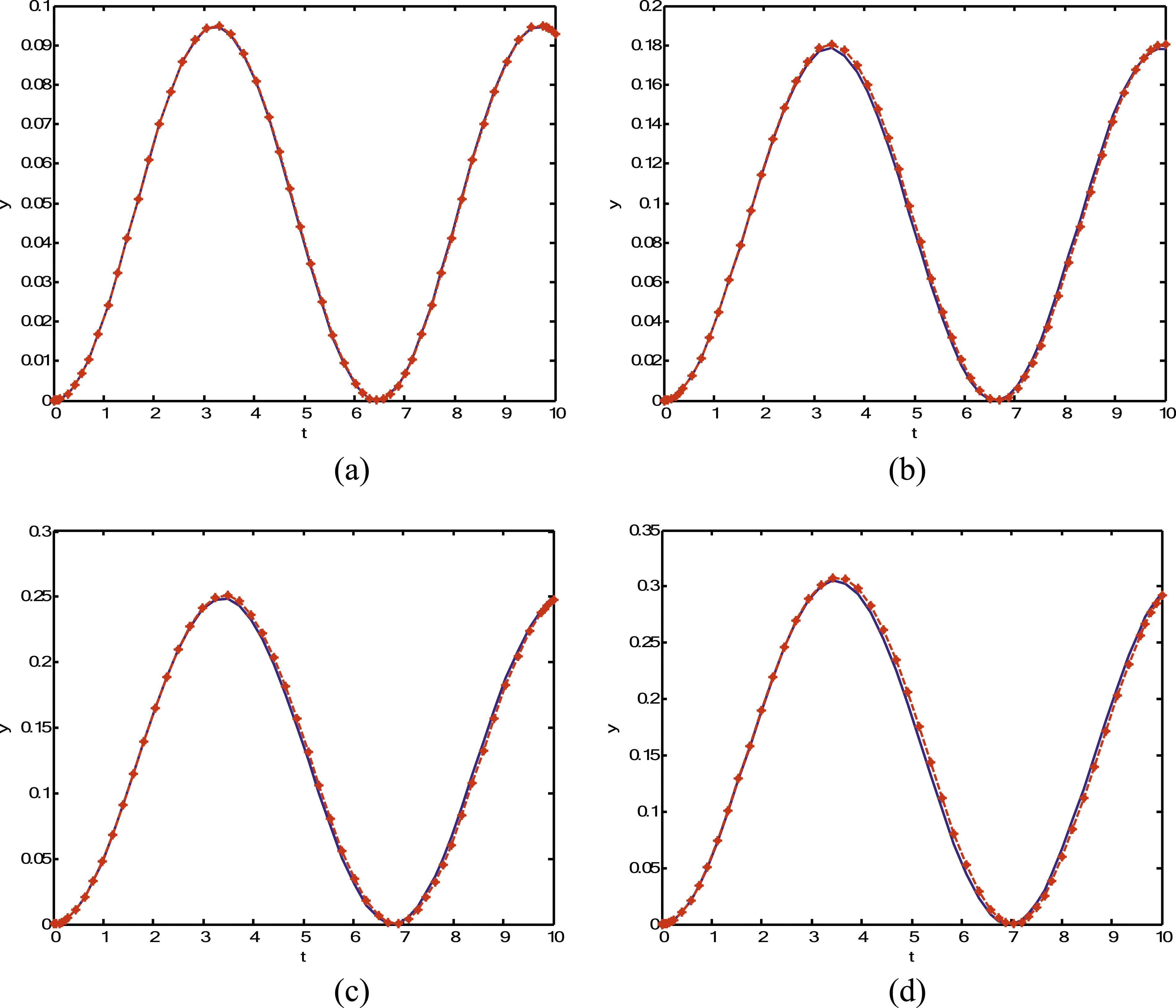
Conclusion
In practical engineering applications, there is an urgent need to develop a simple method for obtaining relatively high-accuracy analytical solutions. The variational iteration method is one of several numerical approaches used for studying nonlinear systems. This paper explores a nonlinear oscillator with zero initial conditions that arises in a micro-electromechanical system, as an illustration. The analytical solution is obtained using He’s frequency formula method and the variational iteration method coupled with a new general integral transformation. The approximate nonlinear frequencies and analytical solutions are compared with the exact ones obtained by the fourth-order Runge–Kutta method. These results are discussed in detail and shown graphically. The powerful and easy-to-use technique for handling nonlinear differential equations is displayed through the result comparison and theoretical analysis. Because the new integral transform has the same essential qualities as those for Laplace and Fourier transform, it becomes a promising tool for solving nonlinear problems when coupled with the variational iteration method. It could be easily extended and applied to solve other nonlinear situations.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.