
Abstract
The paper investigates the nonlinear transversal vibrations of a cantilever beam structure in the primary resonance case. A time-delayed position-velocity control is suggested to reduce the nonlinear vibrations of the structure under consideration. A non-perturbative method (NPM) is used to get an equivalent analogous linear differential equation (DE) to the original nonlinear one. For the benefit of the readers, a comprehensive description of the NPM method is provided. The theoretical findings are validated through a numerical comparison carried out by employed the Mathematica Software. Both the numerical solutions and the theoretical outcomes showed excellent agreement. As well-known, all classic perturbation techniques use Taylor expansion, when the restoring forces are present, to expand these forces and therefore lessen the difficulty of the given problem. Under the NPM, this weakness is no longer present. Furthermore, one may examine the stability examination of the issue with the NPM something that was not possible with prior traditional techniques. The controlled linear equivalent model is examined using the multiple-scales homotopy method. The amplitude-phase modulation equations which control the dynamics of the structure at the various resonance circumstances are established. The loop-delay stability diagrams are analyzed. It is looked at how the different controller parameters impact the oscillation behaviors of the system. The obtained theoretical outcomes showed that the loop delay has an important impact on the effectiveness of the control. Therefore, the ideal loop-delay values are given and used to develop the enactment of the organized control. The completed analytical results are also numerically validated, to reveal their good correlation with the achieved theoretical new results.
Keywords
Introduction
The nonlinear phenomena of numerous engineering constructions, involving mechanical structures, arm-type positioning methodologies, networks of slider-crank techniques, helicopter rotor blades, wind-turbine blades, aircraft wings, large space constructions, etc., were frequently simulated using a cantilever beam structure (CBS). In such nonlinear geometrical engineering systems, the nonlinear characteristics of the system, and external excitation forces were just reasons for the nonlinear vibrations. When these systems were excited away from their resonance circumstances with little excitation amplitudes, negligible systemic nonlinearities were occasionally possible. At various resonance conditions, however, too-small excitation forces could result in significant vibration amplitude for such a nonlinear system.1–3 Resonant vibrations could completely destroy a system4–6 as well as reduce its accuracy, especially in applications at the micro and nanoscale. Various active vibration controller approaches were presented and put into practice to control the CBS vibrations as a solution to the resonant oscillations. When a CBS was subjected to primary resonance excitation, both the nonlinear saturation controller and position feedback control were used to prevent the nonlinear oscillations. 7 It was proposed that the led zircon ate titivate patches, which operated as both a sensor and an actuator, be applied by controllers. According to the previous experimental findings, the position feedback controller was also highly effective in reducing the transitory system oscillations, whereas the saturation control bettered at the reduction system steady-state vibration. To suppress the CBS, nonlinear vibrations due to a primary resonance, a cubic velocity feedback controller was developed. 8 It was demonstrated that the suggested control mechanism was more effective than a linear feedback controller at reducing system vibration. A nonlinear oscillation of the CBS was reduced by using an eventually overcome saturation controller. 9 A second-order control was connected to the primary structure through a sensor and an actuator to apply the control technique. An effective frequency measurement technique was incorporated into the applicable controller to make it adaptive and ensure that the interior resonance concerning the control and the structure under consideration becomes 2:1. It was possible to control the oscillation of a piezoelectric-elastic-piezoelectric sandwich beam structure using a proportional-derivative controller when both sub-harmonic and super-harmonic resonance scenarios were suggested. 10 It was investigated how to regulate vibration in a nonlinear beam prototypical using a macro-fiber composite actuator. 11 The linear position, cubic position, positive position, and nonlinear saturation controllers are four distinct types of controllers that were introduced. The saturation analytical controller was thoroughly examined and matched through the other three controller algorithms, in which it was found to be ineffective for auto-parametric systems. A transversely stimulated CBS with a tip mass nonlinear vibration control was examined. 12 For the purpose of suppressing the vibrations of the system under consideration in primary and sub-harmonic resonance situations, it was designed a cubic velocity feedback controller. The positive position feedback control was used in an analytic analysis for oscillation control of a nonlinear CBS. 13 The scheme vibrations might be reduced to almost nothing by adjusting the fundamental controller frequency until it was identical to the network excitation frequency. In light of the engineering significance of the CBS, the existing paper is apprehensive by the analysis of this topic.
The behaviors of time-delayed dynamical systems were more complicated than those of non-delayed ones because they were effectively unlimited systems. In automatic frequency control systems, the time delays were expected and previously thought to be a bad thing that might destabilize unstable systems. In recent years, a lot of articles have used time delays as a controller factor that may be used to increase control effectiveness. It looked at how a time-delayed proportional-derivative feedback control may control the oscillation of a CBS. 14 The impact of time delays on stainless steel was considered. 15 The theoretical solutions of limit cycles and their stability, as well as an investigation of the bifurcation structure, were achieved by the procedure of multiple-scales homotopy (MSH). The theoretical findings demonstrated that a delay can change the saturation controller operating range, each enlarging or contracting the actual frequency bandwidth. It was demonstrated that the loop delay can be controlled to become unstable. By using a saturation-based controller, the time delay was considered in the active suppression of nonlinear vibrations. 16 It was observed that the vibration can be reduced for various time delays when the time delay was varied for given controller parameters. In nonlinear dynamic systems, the nonlinear feedback control offered an efficient way for vibration prevention. The impact of temporal delays on the nonlinear control of parametrically excited cantilever beams was thoroughly inspected. 17 The modulation equations that control the nonlinear dynamics beam were obtained using multiple approaches. A weakly nonlinear second-order delay system with cubic nonlinearities was studied for its principal resonances using the MSH approach. 18 The use of time delays reduced oscillations in two degrees of freedom nonlinear scheme, approximating a horizontally maintained Jeffcott-rotor system, was demonstrated. 19 It was investigated how a time-delayed position-velocity controller could control the vibration of a horizontally hanging Jeffcott-rotor structure with cubic and quadratic nonlinearities. 20 It was shown that, in the case of negative position feedback control, the time delay increased the oscillation amplitudes and could destabilize the structure. A vertically maintained Jeffcott-rotor structure vibration management was examined. 21 The system was connected to a modified version of the controllers, grounded on the diffusion occurrence, using quadratic coupling nonlinearity. When a nonlinear separation system was exposed to various kinds of external excitations, the time-delayed feedback control was used to increase the dynamical performances. 22 Through the coupling of a time-delayed oscillation absorber to the primary system, the equal-peak property with the smallest resonant peak was accomplished. 23 Through using a suggested incremental iteration approach, the authors were able to determine the ideal controller gain and the loop delay that can reduce the oscillation peaks. Three alternative time-delayed feedback controls were added to the oscillation controller of a piezoelectric elastic CBS. 24 The fundamental finding of this study was that, at certain loop-delay values, the delayed feedback control could increase the structure damping factor. The time-delayed position and velocity were employed to prevent the nonlinearity of a Van der Pol-Duffing oscillator. 25 The time delay served as an additional protection against the system under consideration vibrating nonlinearly. Through matching the obtained theoretical result to the numerical solution (NS), the accuracy of the result was evaluated. Time delay relays, as was previously mentioned, can decrease the amount of energy consumed to start enormous industrial machinery or to turn lights or other devices on and off at specific periods.
It was generally recognized that the nonlinear ordinary/partial DEs may be employed to organize a number of technological concerns. Motivated by their individual interests, they commonly have appeared to be achieved. Consequently, the expected solutions to various nonlinear DEs attracted the attention of numerous researchers. The complicated DEs lacked to be demonstrated by the small parameter technique and the averaging method, respectively, Refs. [26] and [27] He’s frequency led analytically to obtain linear DE to the complicated nonlinear DE. Linear systems with two degrees of freedom and white noise parametric excitation were explored for Lyapunov exponents and moment Lyapunov exponents.
27
The homotopy perturbation method (HPM) was employed to regulate the clear asymptotic equations for these exponents while low-intensity sounds were present.
28
Additionally, the methods of MSH and the Lindstedt-Poincaré were used to determine the solutions of oscillatory systems. Nevertheless, both approaches relied on a little factor. Finding small parameter would allow the relevant equations to be written in a more practical. Iterative methods using the HPM have become more important in recent years for generating approximations of a range of nonlinear DEs that are slightly closer to their closed-form solutions.
29
This method is contingent on the preliminary estimation of the solution; subsequently, if the preliminary conjecture did not counterpart the actual method used to solve the problem, the process would diverge and not provide the expected outcome. Numerous scholars have expressed interest in one of the severe problems that arise with nonlinear oscillators. It was difficult for researchers and physicists to establish an exact or nearly accurate solution to different nonlinear DEs. An analytical approximation of a magnetic spherical was analyzed using the HPM.
30
The frequency formula was developed31–33 and also came up with a creative strategy to approach linearity in a nonlinear equation. Recent developments of the asymptotic method were described, and they were argued to apply to both strong and weak nonlinear DEs. The generated approximate theoretical outcomes were effective for the entire domain. Numerous modified perturbation methods as well as other mathematical tools including vibrational theory, homotopy technology, and iteration methodology have been presented to address the shortcomings of traditional perturbation. A review of recent advancements in asymptotic methods that applied to weakly and strongly nonlinear equations was reported.
31
The focus of the work was mostly on Chinese developments in this area. Three analyses of the nonlinear oscillators in light of the most basic techniques were He's frequency formulation, the max-min methodology, and the HPM.
32
He’s frequency was increased the accuracy by using the weighted average in the mathematical model of his frequency expression. It was suggested that strongly nonlinear oscillators be controlled simply and exclusively.
33
The results showed that the strategy provided a response that was primarily accurate. When using the simplest solution method, the study provided a highly useful tool for rapidly finding the amplitude-frequency relationship of a nonlinear oscillator. Both a packaging system and an exploratory micro-electro-mechanical system employed the connection concerning the frequency and amplitude of a nonlinear vibration system.
34
A straightforward frequency prediction technique was proposed for nonlinear oscillators with changeable starting circumstances, where an efficient method for comprehending a nonlinear vibratory system vibration feature was produced. In accordance with He’s frequency formulation, throughout the areas of fluid mechanics, the recent work was provided.
35
The following specifics must be emphasized with reference to the selected non-perturbative method (NPM), which backs to El-Dib,
36
or outstanding results: 1. The inventive technique generates a different corresponding linear differential equation that is the same as the existing nonlinear one. 2. These two equations have the accurate relationship to one another for the new approach. 3. All traditional approaches use Taylor expansion to lessen the difficulty of the given challenge when restoring forces are applicable. The present strategy eliminates this weakness. 4. The NPM enables us to assess the stability analysis of the problem, in contrast to other perturbation traditional methods. 5. The original strategy appears to be a straightforward, practical, and fascinating tool. It can be used to examine a variety of nonlinear oscillator classes.
To further explanation of how our inquiry is being carried out, the residue of the paper will be divided into the following portions: The NPM to the problem at hand is offered in
Methodology of the structure
In agreement with the significance of the above-mentioned features, a time-delayed position-velocity feedback control to lessen the transversal vibrations of a nonlinear CBS is examined in this paper. Actually, the fundamental nonlinear DE of motion has the form
37


A sketch of the structure of CBS may be displayed in Figure 1. Sketch the prototype of CBS.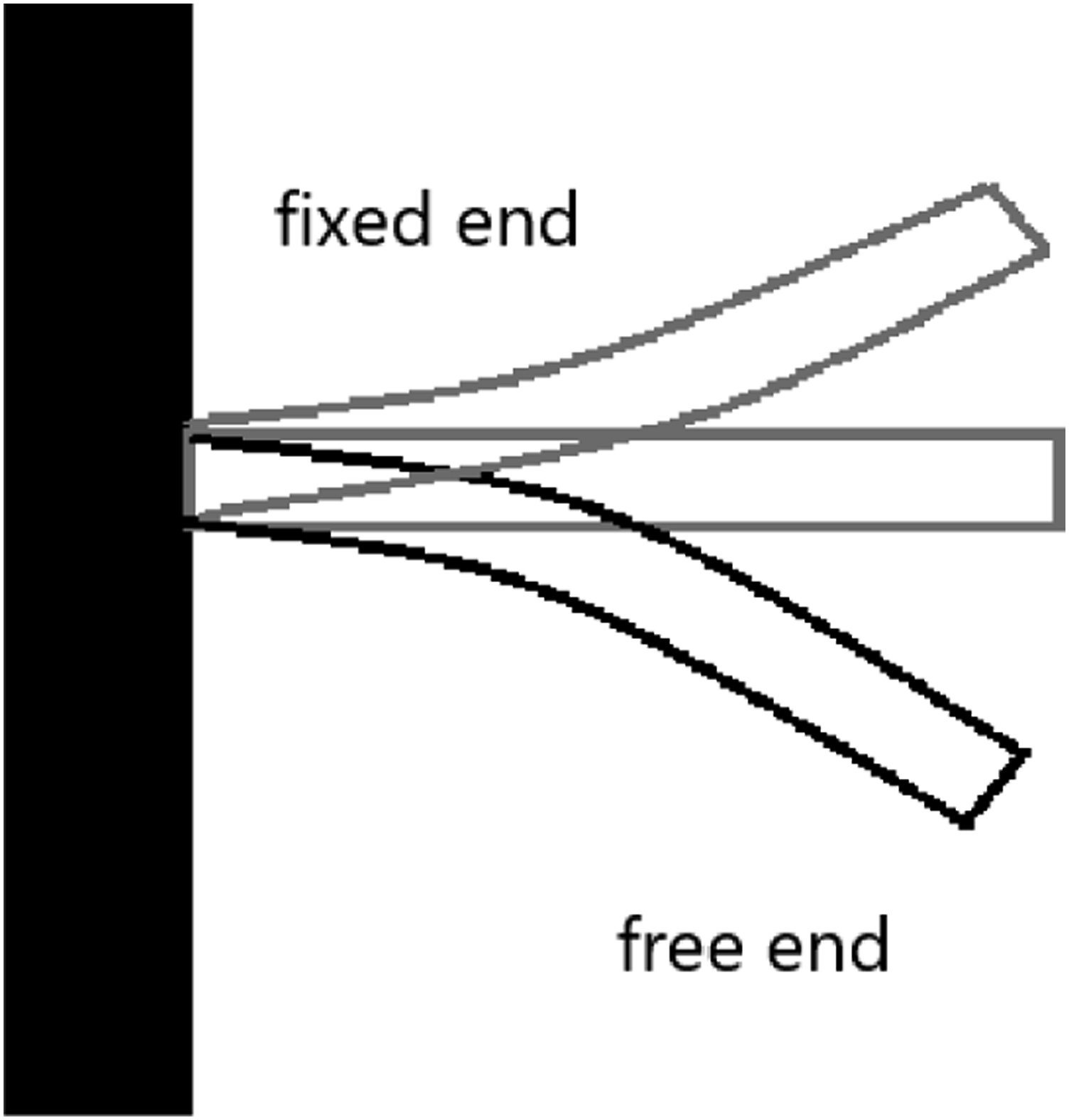
The NPM as a new-brand approach is developed to get an analogous linear DE. The stability requirements are encountered both theoretically and numerically. The possibility of the suggested controller to prevent the considered nonlinear vibration of the CB at the primary resonance instances is investigated. The controlled structure amplitude-phase modulating equations at the primary resonance situations under consideration are obtained using the MSH. It is possible to obtain the stability chart of the controlled system. Some frequency-response curves (FRC) are produced. As well-known, the perturbation theory has been the concentration of many successfully analyzed the nonlinear systems in the last decades. Most of the dynamical systems components are characterized by nonlinear behavior and therefore the entire systems are fundamentally nonlinear. Therefore, it is widely understood that linear system methodologies have confidence in the assumption of a small range of operations in order to be valid. These methodologies fail if the operation range limits are exceeded and subsequently, either poor performance or unstable operation may occur. Subsequently, it has been suggested to apply the perturbation method to these nonlinear structures. These methods are used to obtain approximate theoretical solutions for these nonlinear systems and to inspect the stability and performance of the structure. A novel methodology for studying nonlinear prototypes deprived of employing a perturbation procedure is recommended here. Over this process, there is no necessity to practice wide series solutions, and there is no apprehension around their conjunction. In this article, the main purpose is to examine the equivalent linearized method to the nonlinear system. Follows El-Dib,
38
the qualitative performance of this a system is calculated by converting it into a linearized formula. But to get the frequency-response equation from the obtained linear system, the HPM is employed. To analyze the nonlinear system by a NPM, a guessing solution which is verified the original circumstances necessities to be presented. The proposal guessing solution may be formulated as

The shifting delayed reaction

Consequently, one finds

Inserting equations (4) and (5) into the original fundamental equation (1), one gets

The NPM can now be explained as follows:
The odd nonlinear damping forces, the quadratic nonlinear including quadratic damping forces, and the restoring nonlinear odd force can all be understood of as homogeneous third degrees of nonlinear forces in a particular nonlinear DE. Consequently, any nonlinear DE can be represented as follows using these components:
In our situation, equation (6) may be formulated in the following simplified equation



The extremely efficient method of estimating the frequency is to use weighted residual improvement. The frequency of the generality of odd terms in the governing equation of motion can be revealed using He's frequency. To approximately calculate the frequency, El-Dib39,40 normalized the standardized residual method that might be employed. Using his method and equation (7), one concludes:

The shortened frequency construction of the nonlinear oscillators was presented and demonstrated, and adaptation was recommended.
41
We may condense the integration outcome of equation (8), which is really relatively difficult, by using the Mathematics Software. Subsequently, one sorts out

Equation (11) is sometimes addressed as the equivalent square frequency of the corresponding linear DE. In a similar vein, the equivalent damping coefficient may be established as

The Hamiltonian-based frequency formulation was addressed as an extraordinary achievement for it gave a straightforward insight into a complex nonlinear vibration system with simple calculation. A systematically analysis of the formulation, and two simplified formulations were suggested. 42
As heretofore demonstrated, we achieve

Now, we may construct the equivalent linear DE as

In the primary resonance stage, we will examine the stability of the considered structure.
Perturbation analysis of the primary resonance case
To get frequency amplitude construction for an electrically activated micro beams-based micro-electromechanical structure, Li-He's technique of improved perturbation process was connected with parameter growth technology.
43
If the excitation frequency of the structure is close to its normal frequency (i.e.,



Consequently, the homotopy problem may be formulated as

Deprived of any generalization, two-time scales might be reflected. Characteristically, the movement might be extended as



Inserting equations (19) to (21) into equation (18), then likening quantities of the similar powers of


Equation (22) gives

Inserting equation (24) into (23), we achieve


Reproducing equation (26) by

Equation (27) represents a first-order nonlinear DE with a complex coefficient, as previously shown,
28
the formula of the unknown

These real functions signify oscillation amplitude and the adapted stage angle of the scheme, correspondingly. Inserting equation (28) into equation (27) and splitting the real and the imaginary portions, we obtain:


At steady-state oscillations, we find

In the stability profile, the stability conditions can be obtained from the solution of equation (14) in a frame work of Mathematica software, as follows

Results and discussion
The dynamical performances of the CBS are examined within this part by analyzing the equivalent linear scheme frequency-response equations at the primary resonance situation. The agreed outcomes are attained created on the selected non-dimensional scheme which depends on the particulars:
Moreover, numerical validations for some drawings are achieved by analyzing the creative equation (1) numerically by the Mathematica software at diverse amounts of the used parameters (i.e.,
The nearness of the excitation frequency Represents the examined scheme beforehand controller: (a) the system frequency-response non-perturbative solution (FRNPS) and frequency-response perturbative solution (FRPS), (b) and (c) Comparison between the non-perturbative solution (NPS) of equation (14) with the NS of equation (1) at 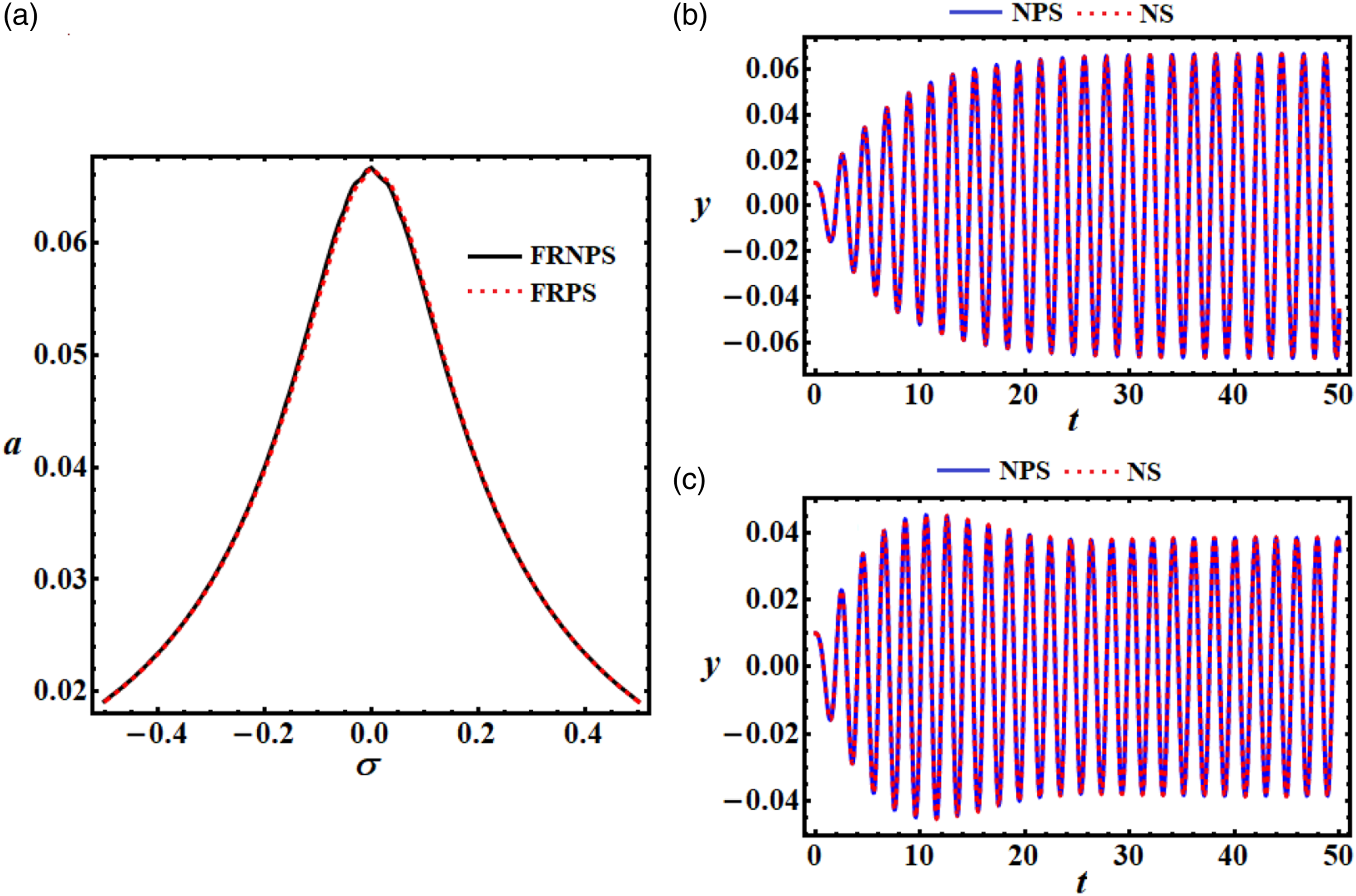

Curves of Figure 3 are plotted according to the values The scheme before control: (a) the scheme FRC of NPM at various amounts of 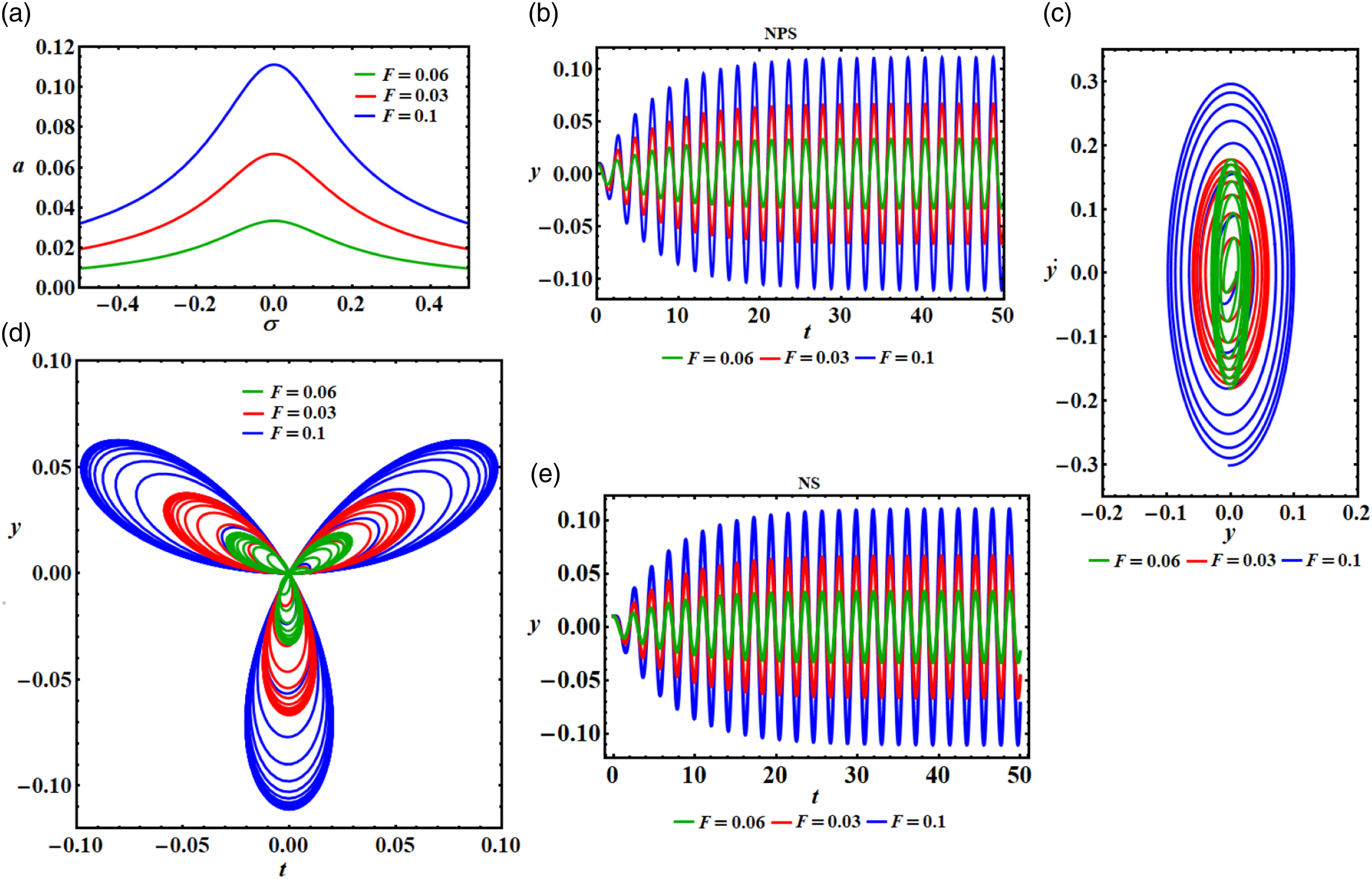
The presentation of the time-delayed control in preventing the reflected scheme can be investigated through the inspection of the curves in Figure 4(a) and (b). It is obvious that the minimum oscillation level of the linear equivalent scheme time history has been noted at The system with control: (a) the time-history of the obtained analytical solution using NPM at 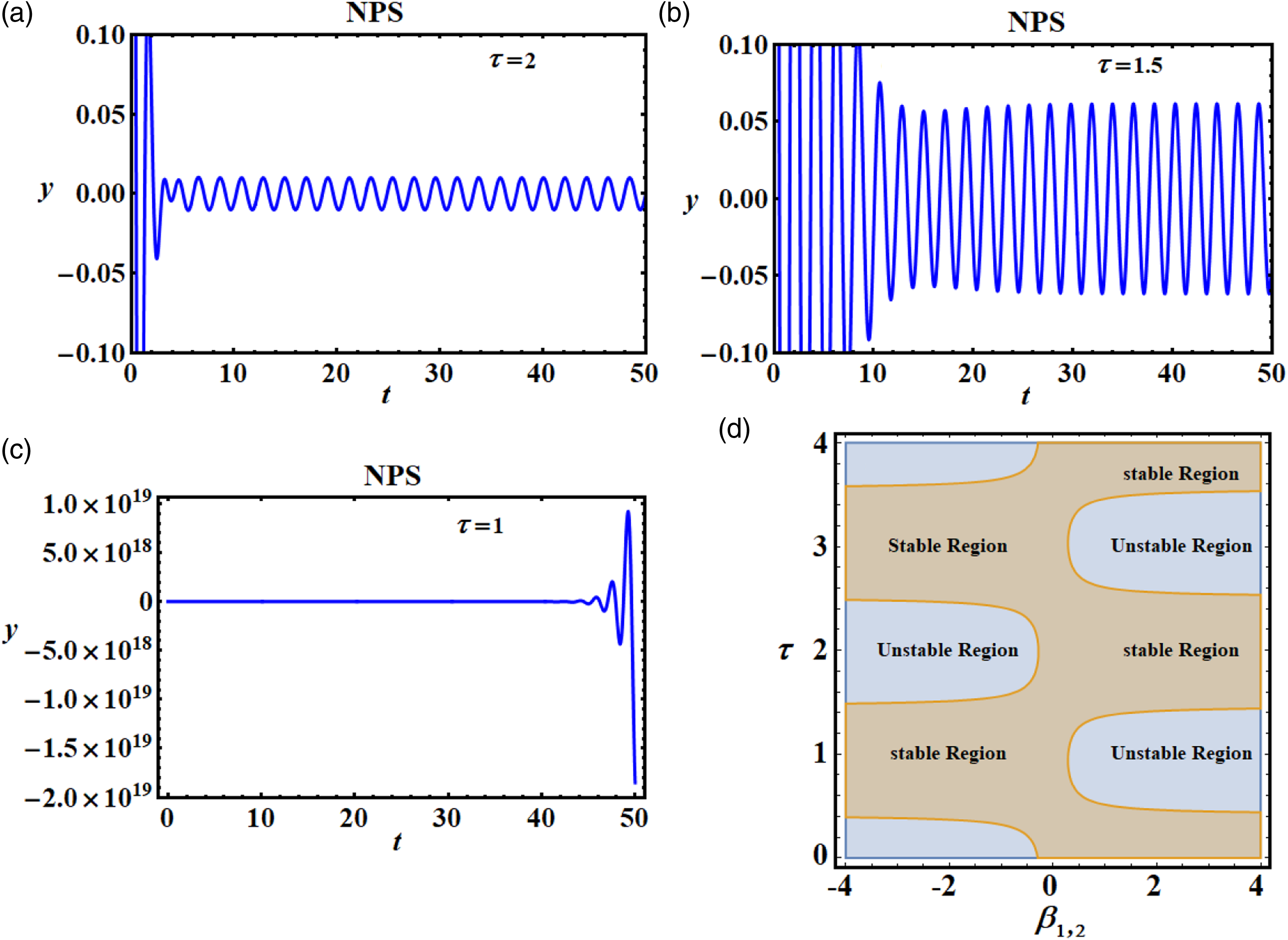
To obtain numerical value of
The polar representations are graphed for the linear system equation (14) in Figure 5(a)–(c). These figures represented the behavior of the system at a small variation of the values of its original frequency The polar graphs of system with control at 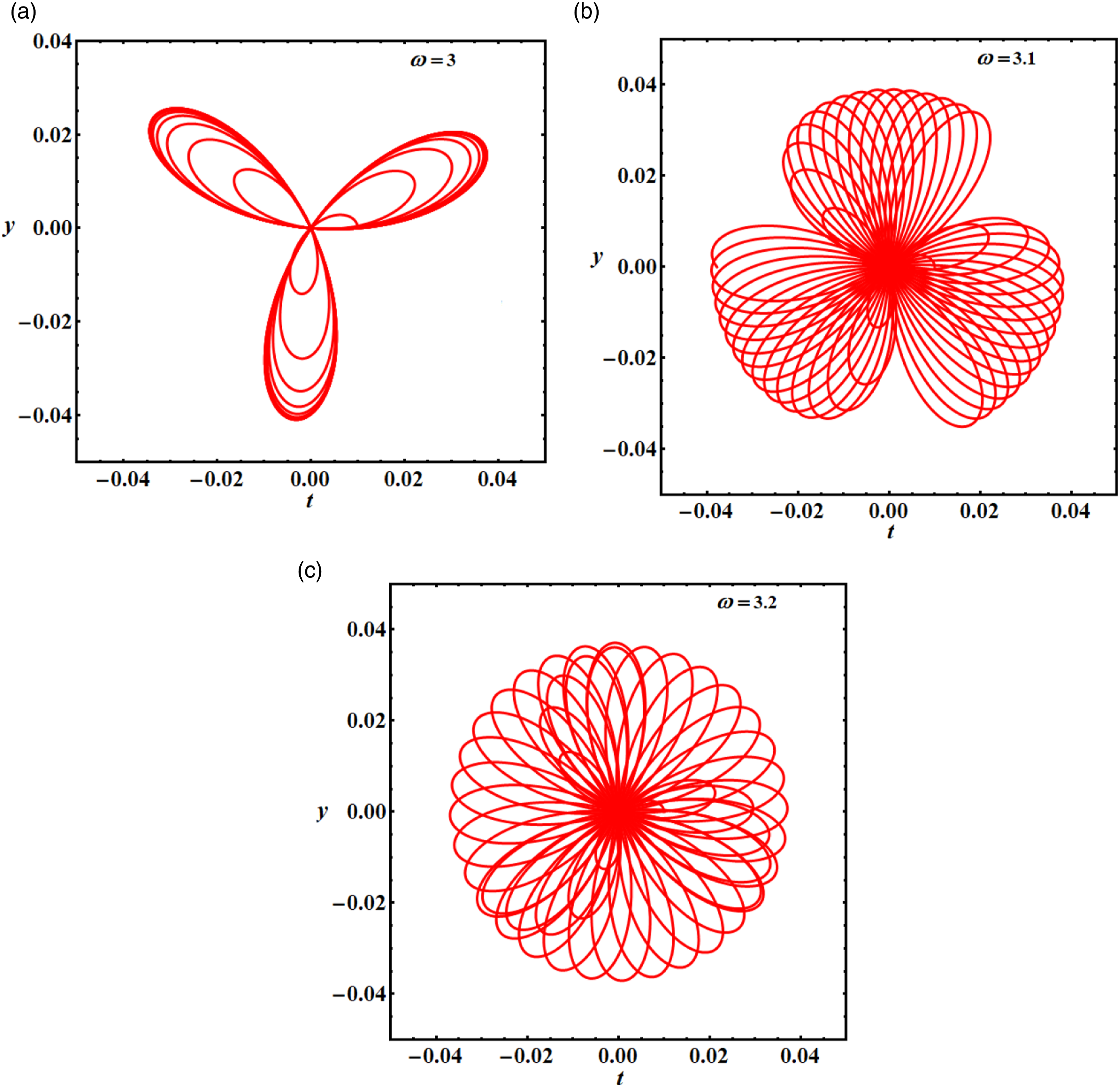
Figure 6 is calculated according to the same values of parameters that are considered in the previous figure at The system with the control at 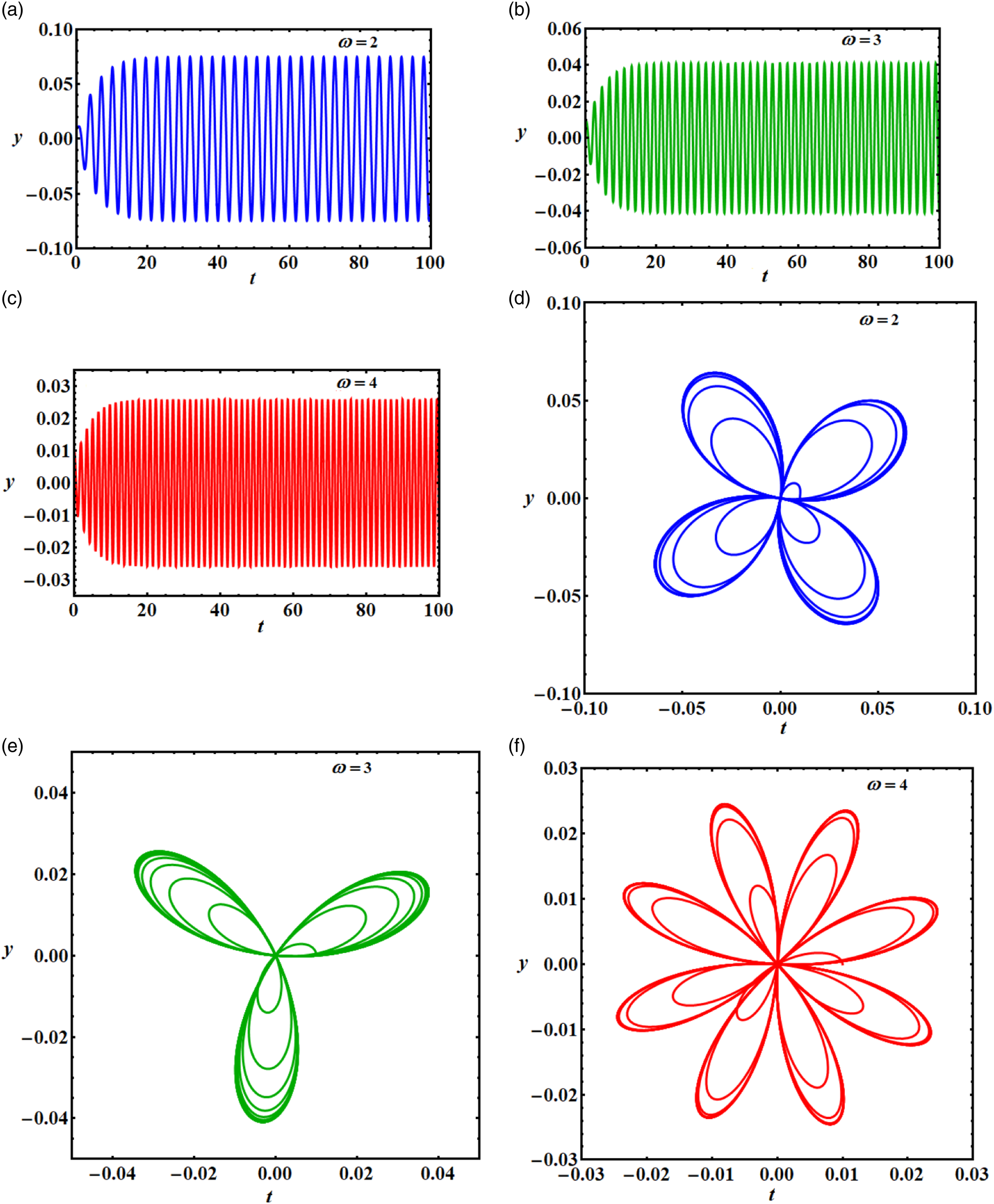
Figure 6(a)–(c) show the impact of the normal frequency of the structure transversal oscillations in a polar form which simulates the time history according to Figure 6(d)–(f) when the same values of parameters are considered and
The different values of the time-delayed position-velocity feedback control at the primary resonance can be clarified in Figure 7(a) and (b), in which they are calculated when The time histories of the NS and NPS with delay: (a) at 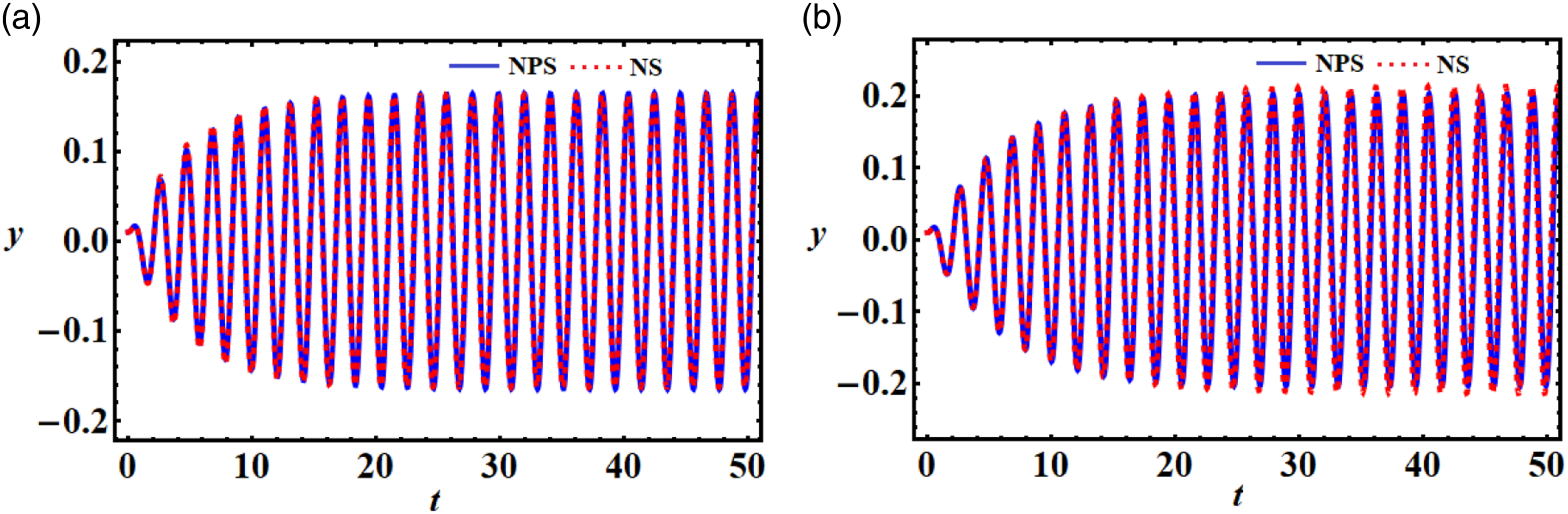
Figure 8(a) displays the equivalent system time history at three various amounts of the damping term (i.e., The system with and without control at 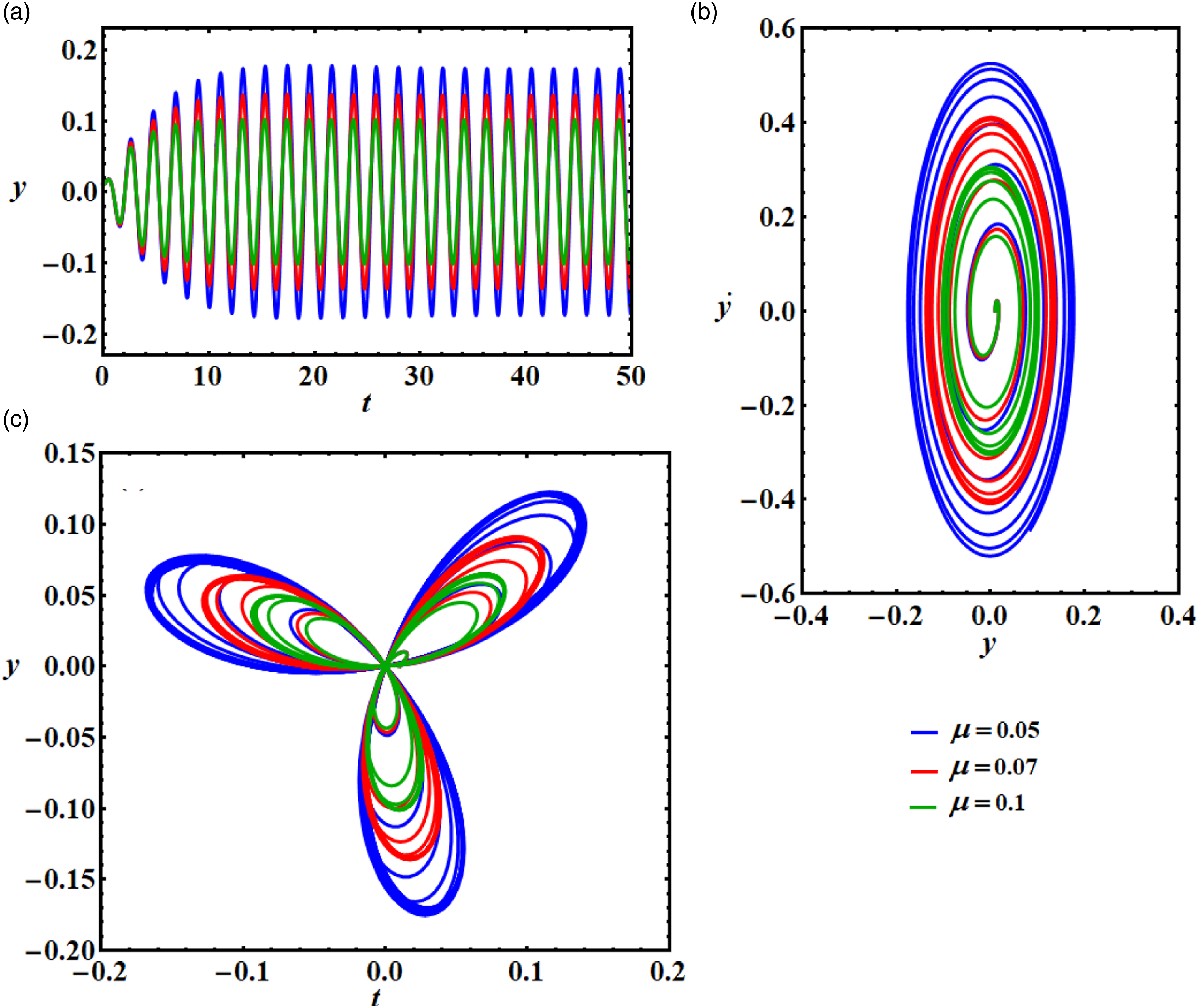
Figure 8(b) and (c) represent the phase plane of the drawn solution in Figure 8(a) and the polar form of the linear system. It is clear that there is a correspondence between the amplitude of the linear system with phase plane and polar form representations.
Stability validation
To display the impact of the control loop-delay (a) Stable and unstable zones in 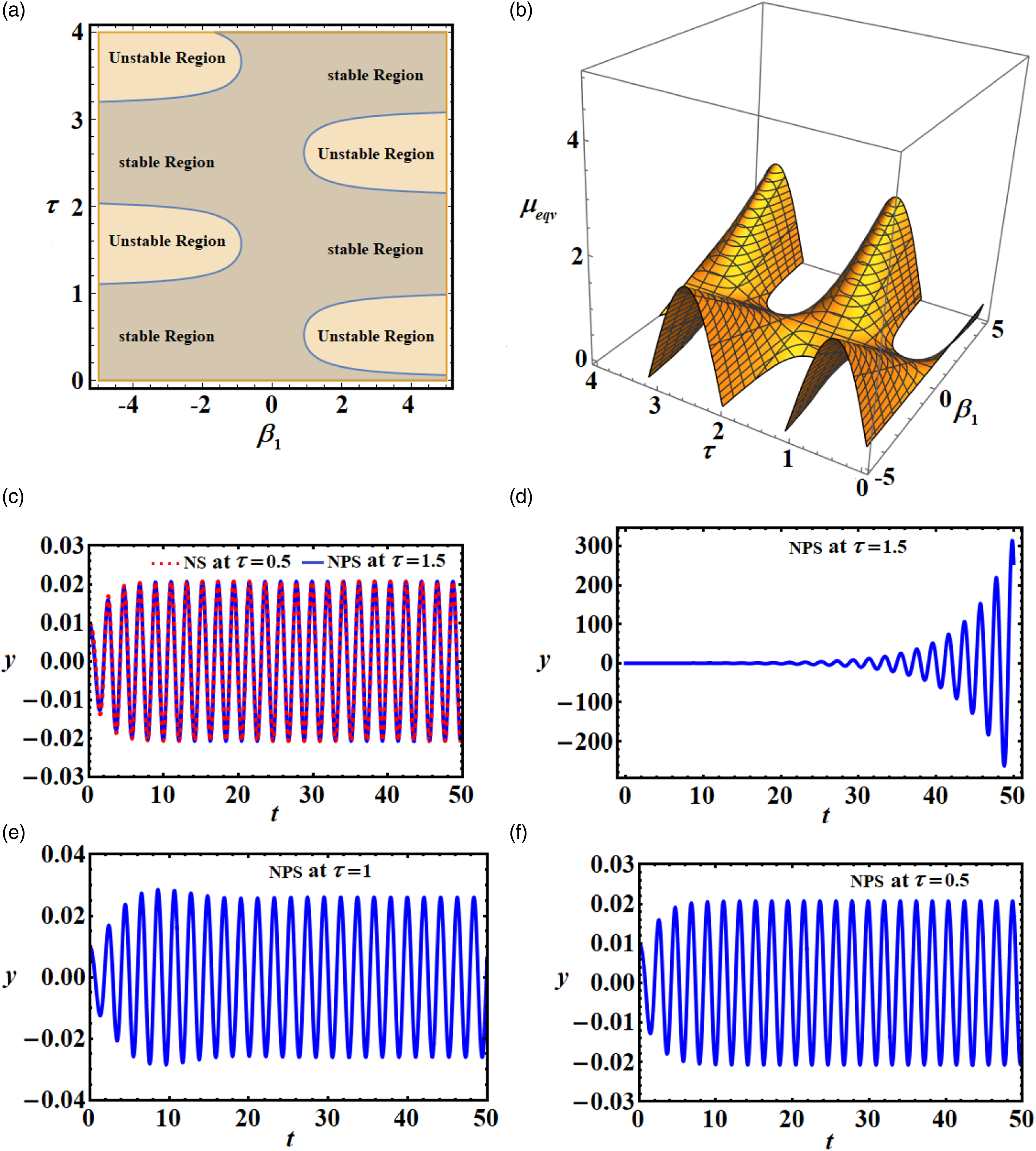
In Figure 10(a), the stable/unstable zones in the plane (a) Stable and unstable solution regions in the plane 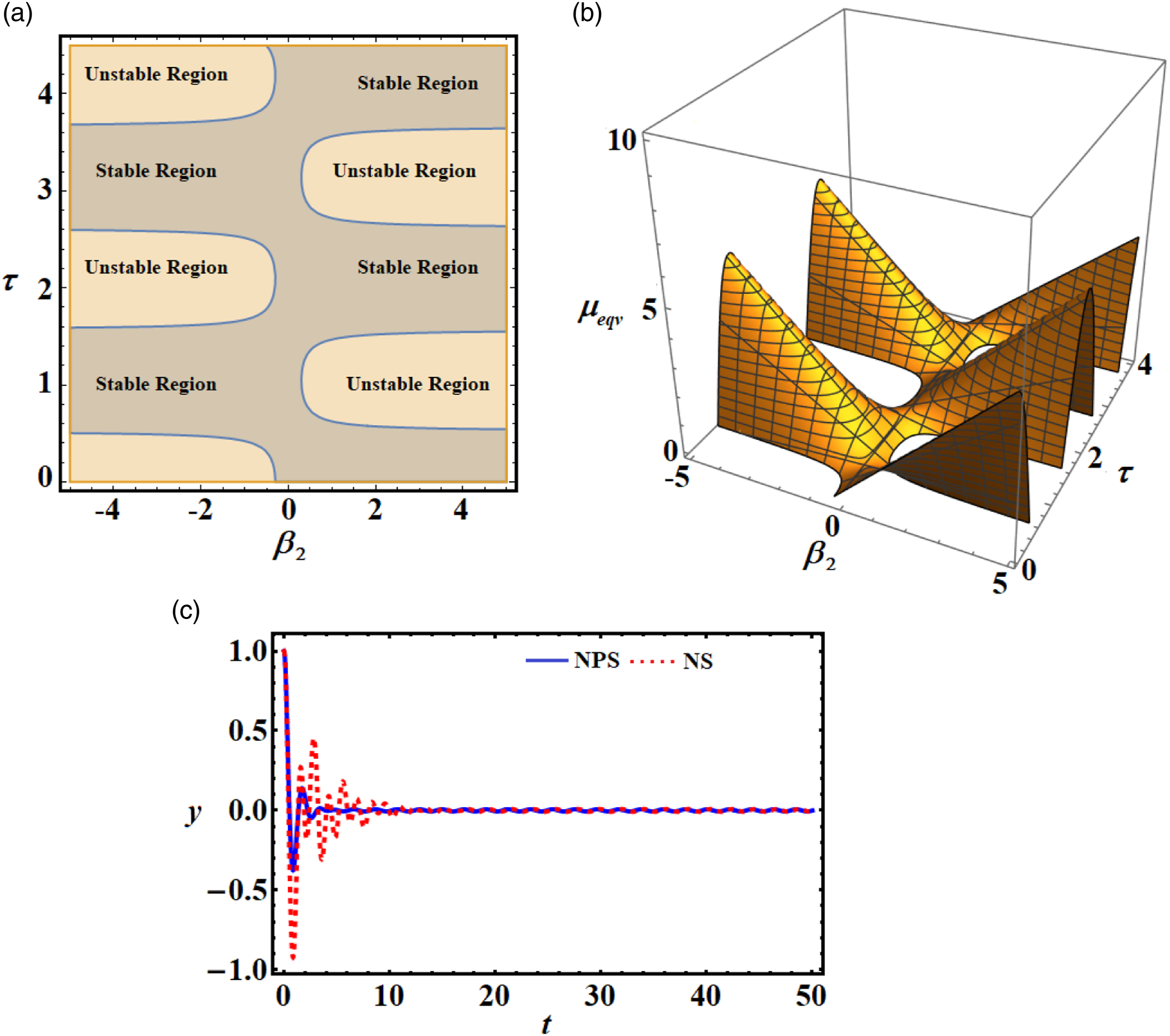
When (a) Stable/unstable zones in plane 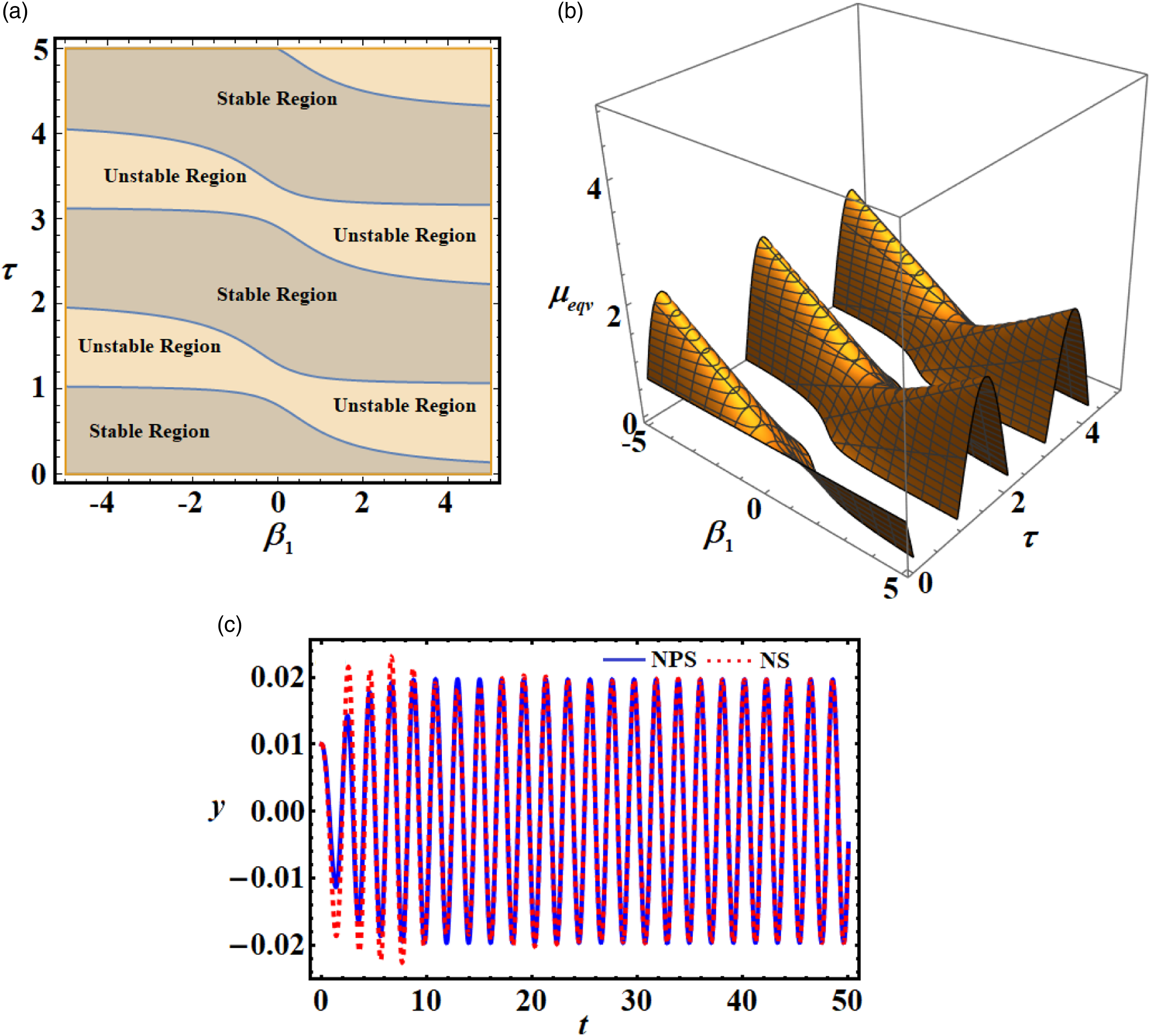
Conclusion
The nonlinear transverse oscillations of a CB in the condition of primary resonance are examined in this work. It is recommended to use a time-delayed position-velocity control to lessen the nonlinear oscillations of the structure. A NPM is utilized to generate an equivalent linear differential equation that agrees to the original nonlinear equation. The numerical technique matches both analytical and numerical ones. To theoretically assess and computationally handle the stability criteria, the stability method is used. The MSH method
48
is used to investigate the controlled linear equivalent model. It is found that the amplitude-phase modulating equations control the dynamics of the system under distinct resonance circumstances. It reaches the loop-delay stability charts. It is looked at how the various control factors impact the oscillation patterns of the structure. The acquired analytical results demonstrated that the loop delay significantly affects the efficacy of the control. Subsequently, the ideal loop-delay settings are provided and employed to raise the effectiveness of the deployment controller. Furthermore, the finalized analytical data were quantitatively checked, which revealed a high correlation with the previously found research findings. The main outcome keys of this study may be summarized as follows: 1. With the NPM, the CBS was studied. The periodic analytic solution is considered. Grounded on the new El-Dib frequency formulation,
38
where the straightforward impression be contingent on converting the nonlinear equation to its corresponding linear equation having a frequency resulting in a similar way to the He's frequency formulation. 2. The solution of the equivalent linearized equation is related with the exact NS of the original nonlinear equation. The relationship concerning theoretical and numerical outcomes displays that the two solutions are actual nearby. This is representative the supremacy of the existing technique. 3. The linear control has adapted the linear damping factor of the reflected structure by using NPM to develop equation (13). Moreover, the natural frequency 4. Accordingly, when the preliminary approximation is not appropriate sufficient for the obligatory solution, it will diverge, and the outcomes are not performed because this method depends on initial conditions. So, we cannot generalize this method to find all solutions for nonlinear systems. 5. The studied structure struggles from numerous nonlinear performances such as the jump occurrence, coexistence of multi-solutions, and sensitivity to the initial conditions, and these behaviors did not appear in the NPM. 6. But the improvement of this linear system obtained by NPM is that their factors are easily calculated and that they contain the belongings of the inventive nonlinear factors. This linearization methodology permits for accomplishing quasi-exact solutions even in the existence of periodic forces. 7. The associations between frequencies and amplitudes are straightforwardly predictable. Furthermore, numerical computations are approved out explicitly to satisfy the justification of the novel methodology and further to demonstrate the efficiency and suitability of the technique. The outcomes are associated with the exact numerical solutions, which display perfect correctness. The technique can be straightforwardly protracted to supplementary nonlinear structures and is consequently exceptionally appropriate in manufacturing and additional sciences.
Footnotes
Authors contributions
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.