
Abstract
Recently, a modified homotopy perturbation method with an auxiliary term was proposed for obtaining an analytical approximate solution of a nonlinear equation. The auxiliary term involves a tuning parameter that gives the modified homotopy perturbation method an additional degree-of-freedom to construct the approximate solution. In this paper, we present a systematic approach for choosing the auxiliary parameter and furthermore show that an optimal value of the parameter yields significant improvement in the approximate solution compared to the standard homotopy perturbation method. We consider the nonlinear oscillator with a discontinuity to illustrate the proposed approach.
Introduction
Nonlinear differential equations play a fundamental role in physics, applied mathematics, engineering, and other disciplines. The last two decades have seen a surge of interest in analytical tools for studying such equations. In particular, the nonlinear oscillator has received considerable attention where the aim is to jointly approximate the frequency of oscillation and the solution of a nonlinear equation. This problem is further compounded by the presence of a discontinuous term in the oscillator equation.
The absence of a small parameter precludes application of the classic perturbation methods. 1 We begin a survey a by reviewing a class of methods that leads to a rapid solution with reasonably good accuracy. This class of methods includes, for example, the amplitude–frequency formulation2–4 and the max–min approach. 5 The application of the amplitude–frequency formulation to a nonlinear oscillator with a discontinuity was discussed by Zhang. 6 Zeng et al. 7 carried out an empirical study of the amplitude–frequency relationship for the same problem. Recent developments to the approach can be found in the work of He.8,9 Zeng 10 studied the amplitude–frequency relationship using the max–min approach for a nonlinear oscillator with a discontinuity. The periodic solution of a generalized nonlinear discontinuity equation using the max–min approach was discussed by Demirbağ and Kaya. 11
Next, we review a class of iterative methods where higher order approximations can deliver more accurate solutions. The approaches in this class include, for example, the homotopy perturbation method (HPM),12–15 the modified Lindstedt–Poincaré method,16–20 the parameter-expansion method,21–24 energy balance method,25,26 and the variational iteration method.12,27,28 The application of the HPM to a nonlinear oscillator equation with a discontinuity was discussed for the first time by He. 14 Özis and Yildirim 29 showed that the construction of the homotopy equation is problem dependent and affects the accuracy of approximation. In a series of papers,17,18,30 He showed that modified Lindstedt–Poincaré methods could be applied to strongly nonlinear equations. Liu 19 applied He’s method 17 to approximate the period of a nonlinear oscillator with a discontinuity. Wang and He 23 and Zengin et al. 24 demonstrated the effectiveness of the parameter-expansion methods for nonlinear oscillators with discontinuities. Application of the energy balance method to nonlinear oscillators with discontinuities was discussed by Afrouzi et al. 31 and Zhang et al. 32 The variational iteration method for a nonlinear oscillator was discussed by He. 33 Rafei et al. 34 applied the approach to a nonlinear oscillator with a discontinuity.
In all of the above-mentioned works only first-order approximate solutions were constructed which were found to be in good agreement with those obtained via competing methods. Beléndez et al.35–37 considered an anti-symmetric quadratic nonlinear oscillator, 38 a nonlinear oscillator with a discontinuity, and developed higher-order analytical approximate solutions using a modified HPM and the generalized harmonic balance method. Kaya and Demirbağ 39 discussed a class of nonlinear discontinuity equations which subsumes the nonlinear oscillators considered in the above-mentioned works. Furthermore, the authors applied the parameter expanding methods to construct first-order approximate solutions that agree well with those obtained via competing methods.
A number of modifications to the standard HPM procedure have extended the applicability of the approach to an even broader class of problems which include the Riccati equation, 40 integral equations,41,42 heat transfer problem, 43 differential-difference equations, 44 and optimal control problems. 45 Recently, the introduction of an auxiliary term in the homotopy equation has been discussed.46,47 Noor 46 proposed using an auxiliary operator that needs to be determined. Moreover, an auxiliary parameter value of unity was discussed. He 47 assumed a particular form of the auxiliary term. For a first-order approximation, the auxiliary term is dropped by setting the auxiliary parameter to zero, reducing the homotopy equation to the standard HPM form. For higher-order approximation, the auxiliary parameter value of unity is expanded as a power series in the homotopy parameter. In both the methods,46,47 the value of the auxiliary parameter was chosen in an ad hoc manner. In this paper, we discuss for the first time, a systematic procedure for choosing the auxiliary parameter in an optimal manner. We illustrate the proposed approach for the nonlinear discontinuity equation previously considered by Kaya and Demirbağ. 39 As already mentioned, the generalized nonlinear equation encompasses a broad class of strongly nonlinear and nonsmooth problems considered in the literature. We compare the performance of the proposed approach with the standard HPM for obtaining analytic first- and second-order approximation of the frequency of oscillation and the solution of the nonlinear equation.
Modified HPM with an auxiliary term
Consider the general nonlinear differential equation


The HPM
48
constructs a homotopy of equation (1),

From equation (2), we have


As p increases from 0 to 1, the trivial problem (equation (3)) continuously deforms to the original problem (equation (4)).
The modified HPM
47
introduced an auxiliary term in the homotopy equation

Assuming the solution of equation (1) can be expressed as a power series in p, we have

Furthermore, we assume that the auxiliary parameter k can also be expressed as a power series in p to yield

Substituting equations (6) and (7) in equation (5), we obtain

Equating coefficients of corresponding powers of p gives a series of linear differential equations with initial conditions. Then, an approximate solution of equation (1) is given by

The convergence of the series was discussed by He. 12
Modified HPM for a discontinuous oscillator
Consider the nonlinear discontinuity equation (6)
39
with

For
Consider the homotopy equation


Note that for the auxiliary parameter k = 0, equation (9) reduces to the standard form and for
We proceed by expanding the solution v(t), square of the unknown angular frequency



Substituting equations (10) to (12) in equation (9) and equating coefficients of corresponding powers of p on both sides gives a series of linear equations. The first three terms of the series are




The solution of equation (13) is

Substituting in equation (14), we obtain

We take the approach of Beléndez et al.35,36 and consider a Fourier series expansion of


The first term is given by

Substituting equation (18) in equation (17) we obtain

Dropping the secular terms in v1 requires

Setting p = 1 in equation (11) and substituting for

Note that for ko = 0 this is the same expression for the first-order approximate angular frequency obtained using the parameter expanding method. 34
With equation (22) satisfied, equation (21) reduces to


Substituting on the left hand side of equation (24)

Equating coefficients of corresponding harmonics on both sides, the coefficients


The second-order approximation requires substituting equation (25) in equation (15). But equation (25) has infinite harmonics. Following the approach of Beléndez et al.,35,36 we truncate the series expansion as

Note that
Consider the case M = 1. Then



The first-order approximate solution of equation (8) is then given by

Note that
Continuing, we substitute equations (16) and (29) in equation (15) to obtain

Consider the Fourier series expansion


The first term is given by

Substituting equation (33) in equation (32) gives

Dropping the secular terms in v2 leads to

Setting p = 1 in equation (11) and substituting for

Note that ω2 does not depend on ko.
With equation (37) satisfied, equation (36) reduces to


Substituting on the left-hand side of equation (39), we get

Equating coefficients of corresponding harmonics on both sides we obtain


The initial condition

Using a similar argument as above we can truncate the series expansion in equation (40)

Consider the case M = 2. Then



Finally, the second-order approximate solution of the nonlinear oscillator (equation (8)) is given by

Note that
Results and discussion
Consider the nonlinear discontinuity equation (8) with
Normalized solution of the nonlinear discontinuity equation (8) with
The integrated squared error (ISE) of the normalized first-order approximate solution
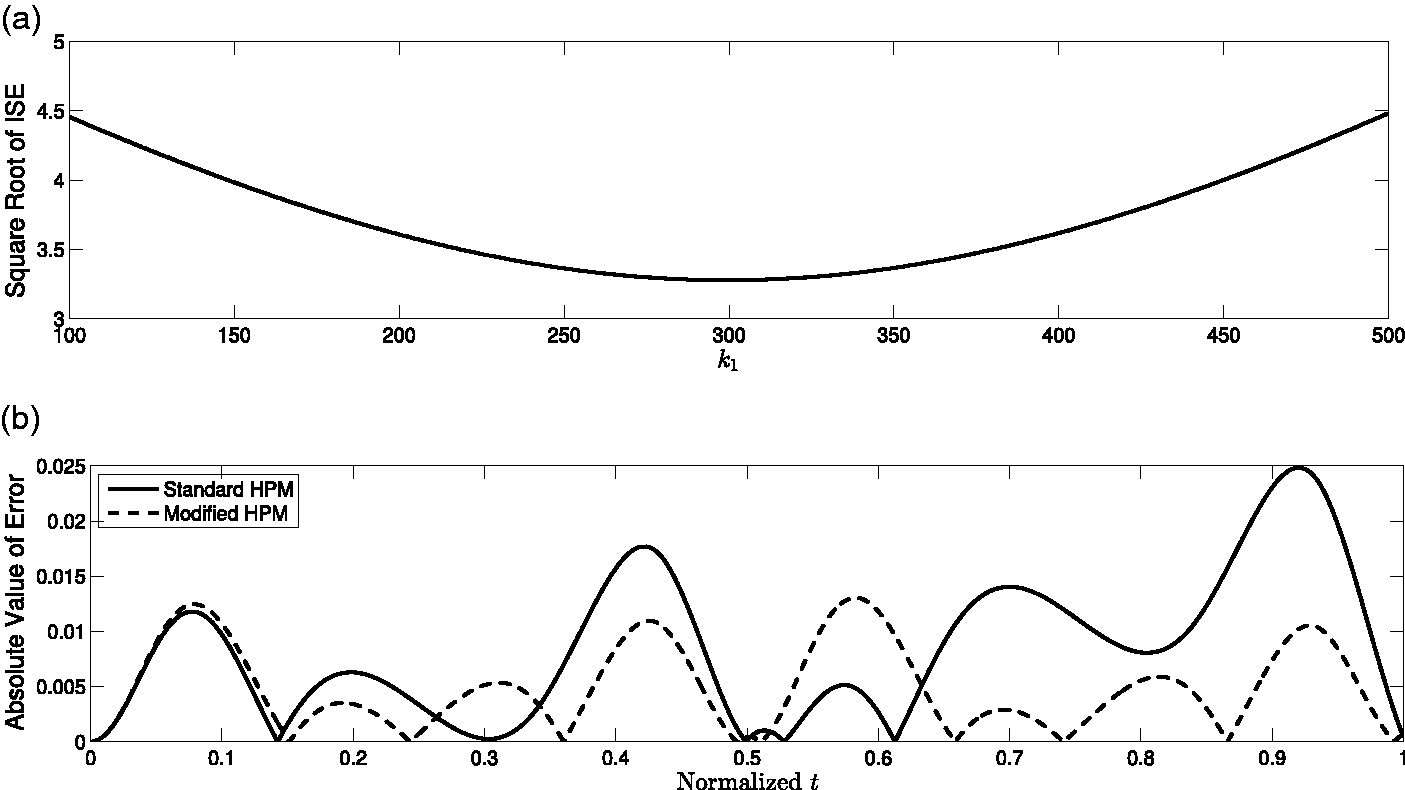
The ISE with respect to ko is convex. Figure 2(a) shows a plot of the square root of the ISE for
(a) Square root of the integrated squared error (ISE) for the first-order approximate solution for
Substituting ko = 8094 in equation (23), the first-order approximate angular frequency is
Figure 2(b) shows the absolute value of the error over one period for the first-order approximate solution obtained using the modified HPM with ko = 8094 (dashed line) and the standard HPM with ko = 0 (solid line). In the case of the modified HPM, the error is bounded below 0.02 whereas for the standard HPM the error is an order of magnitude higher, bounded below 0.33. This result is significant for two reasons: first, the modified HPM with the auxiliary term considerably improves the first-order estimate compared to the standard HPM; second, it emphasizes the need to carefully select the auxiliary parameter. The choice k = 0 47 or k = 1 46 is clearly non-optimal.
Figure 3(a) shows a plot of the square root of the ISE for the second-order approximate solution given by equation (31) for a range of values of the parameter
(a) Square root of the integrated square error (ISE) the second-order approximate solution for
Substituting
However, as shown in Figure 3(b), the absolute value of the error for the second-order approximate solution given by equation (31) with
Conclusion
In this paper, we have discussed for the first time a systematic procedure for determining the tuning parameter in the homotopy equation of a modified HPM. The optimal value of the parameter is determined as the minimizer of the ISE function. The first- and second-order approximate solutions depend on a single component of the parameter expansion. This leads to an efficient line search method to find the minimizer. The procedure was illustrated for a nonlinear oscillator with a discontinuous term and it was shown that an optimal choice of the auxiliary parameter leads to a significant improvement in the first-order approximation of the angular frequency of oscillations and the solution of the nonlinear equation compared to the standard HPM. While the second-order approximate solution of the angular frequency did not yield an improvement, the second-order approximate solution of the nonlinear equation is generally better. Future work will investigate more general forms of the auxiliary term.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.