
Abstract
The power unit on board the ship generates periodic low-frequency vibration that affects the normal operation of the equipment on board, and the adaptive feedforward control algorithm can effectively suppress such harmful vibration noise. But the adaptive feedforward control algorithm needs to obtain the identification model of the secondary channels, and the frequency domain least squares method based on the linear Extended auto-regressive model (ARX) is difficult to obtain the identification model with nonlinear characteristics. The nonlinear auto-regressive model (NARX) adds nonlinear mapping layers to the topology of the ARX model to enhance the identification capability of the NARX model for complex systems. In this paper, a block diagram of the Fx-LMS feedforward control algorithm based on the NARX model is proposed, then the initial parameters of the NARX neural network are optimized using the Quantum Particle Swarm Optimization (QPSO) algorithm and the secondary channel is identified, and the identification results show that the accuracy of identifying the secondary channel using the NARX neural network is higher than that of the ARX model. The simulation and experimental results show that the vibration damping effect of the proposed method is better than the traditional Fx-LMS method for both single-line spectrum and multi-line spectrum periodic low-frequency disturbances, which provides a new method for the suppression of periodic low-frequency disturbances.
Keywords
Introduction
In the process of ship transportation, the suppression of low-frequency periodic disturbances brought by power equipment is great important to ensure the safety of ship structure and improve the service life of equipment. The effective vibration isolation band of passive noise control (PNC) method is generally high, while the low-frequency vibration noise makes the passive vibration isolation method poor in suppressing low-frequency disturbances due to the low-frequency band range.1,2 Active noise control (ANC) methods can effectively suppress low-frequency periodic disturbances,3,4 but feedback control methods such as PID algorithm and fuzzy control algorithm are difficult to compensate the phase lag and amplitude decay caused by the secondary channels in the active vibration control system,5–8 and the parameters tuning also depends on empirical methods, so the application is more difficult and the vibration damping effect is limited. The adaptive feedforward control algorithm is based on the idea of feedforward control, and the adaptive algorithm is used for self-tuning the controller parameters according to the model of the identified secondary channels so that theoretically the best controller can be obtained to compensate and improve the dynamic characteristics of the secondary channels, and thus a good vibration damping effect can be achieved for the low-frequency periodic disturbances.
The adaptive filtered x least mean square (Fx-LMS) algorithm based on the LMS (Least Mean Square, LMS) algorithm has been widely used in vibration suppression of practical engineering objects such as ships, pipelines, aircraft vertical tail, and cantilever beams.9–12 However, the Fx-LMS algorithm is influenced by the accuracy of secondary channel identification, and the conventional linear system identification method can hardly handle the nonlinear characteristics of the secondary channels, so the identification accuracy is limited, which affects the vibration damping effect.13–15 In order to eliminate the effects of nonlinear factors and system noise, a frequency-domain–based filter-x least mean square adaptive algorithm was proposed, 16 but the frequency-domain control algorithm is computationally intensive and difficult to implement, and it is difficult to meet the requirements of modeling accuracy and control real-time at the same time.
Neural networks are a class of data-driven general-purpose models with powerful nonlinear fitting capabilities, and various neural network control algorithms have emerged and achieved certain results and applications in many fields.17–21 Although the modeling capability of neural networks in dynamic systems has been studied as early as 1997, 22 there is less research on the use of neural networks in adaptive feedforward control algorithms for the identification of secondary channels due to the influence of the nonlinear nature of neural networks themselves, which makes the update of controller parameters in the Fx-LMS algorithm compromised.
In this paper, a single-layer active-passive hybrid vibration isolation platform is used as the research object and NARX neural network is used for identifying the secondary channel in order to overcome the complexity of the secondary channels and the influence of nonlinear factors on the identification accuracy of the secondary channels. At the same time, in order to solve the problem that the inaccuracy of the filtering signal affects the controller update, a narrowband filter is applied to extract the filtering reference signal with the same frequency as the vibration signal, which makes the controller update more stable and thus can obtain better vibration damping effect for periodic low-frequency disturbances.
Methods
NARX neural network system identification
The ARX model is a discrete parameter model which represents the system as difference equations in the form of

The ARX model treats the measured system as a form of 1 or a set of difference equations consisting of inputs and outputs. For a single-input, single-output system, the output of the system at the current moment can be expressed as the difference between the weighted sum of several system inputs and the weighted sum of several system outputs at previous moments. The ARX model can be expressed as the network topology shown in Figure 1. The network topology describes the structure of the ARX model and the flow direction of the data. The process of system identification is the process of determining the weights of each connection, and the identified system calculates the current output from the inputs and outputs, and the current output is used as the input of the next moment to calculate the output of the next moment. The frequency domain least squares system identification method based on the linear ARX model has poor fitting ability for nonlinear systems. The NARX model add nonlinear mapping layers between the input and output based on the network structure of the ARX model, as shown in Figure 1. Network structure of ARX model and NARX model.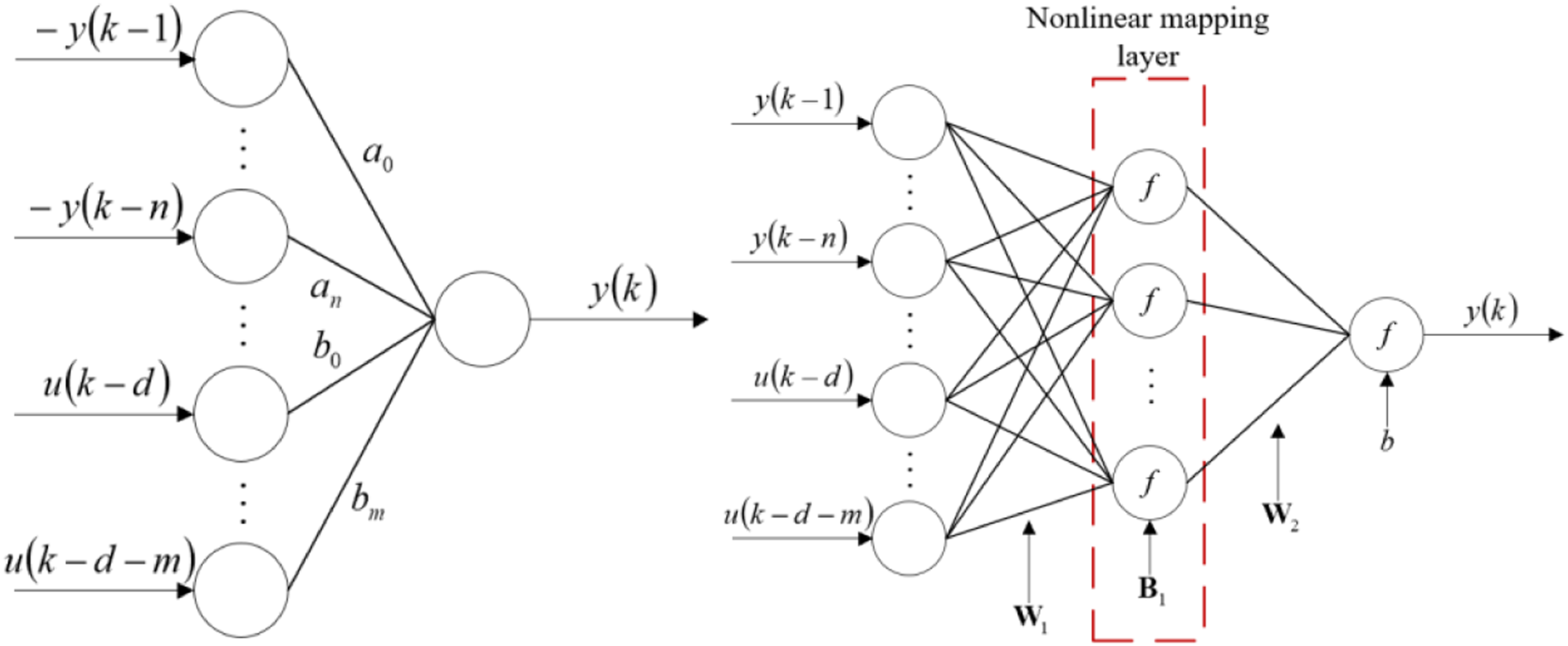
The introduction of nonlinear functions to nonlinearly map the input and output of the system enables the NARX model to establish suitable nonlinear mapping relations for nonlinear systems, and then obtain better identification accuracy. NARX model is also called NARX neural network because its structure is the same as BP neural network, only the network input is treated differently.
In NARX neural network, the input of the network can be divided into two parts, the input of the system to be identified and the output of the system to be identified. The input layer can be further simplified as TDL (Time Delay Layer, TDL) shown in Figure 2, which means that the data input to the network is delayed for several sampling periods before participating in the network operation. Simplified network structure of NARX model with TDL.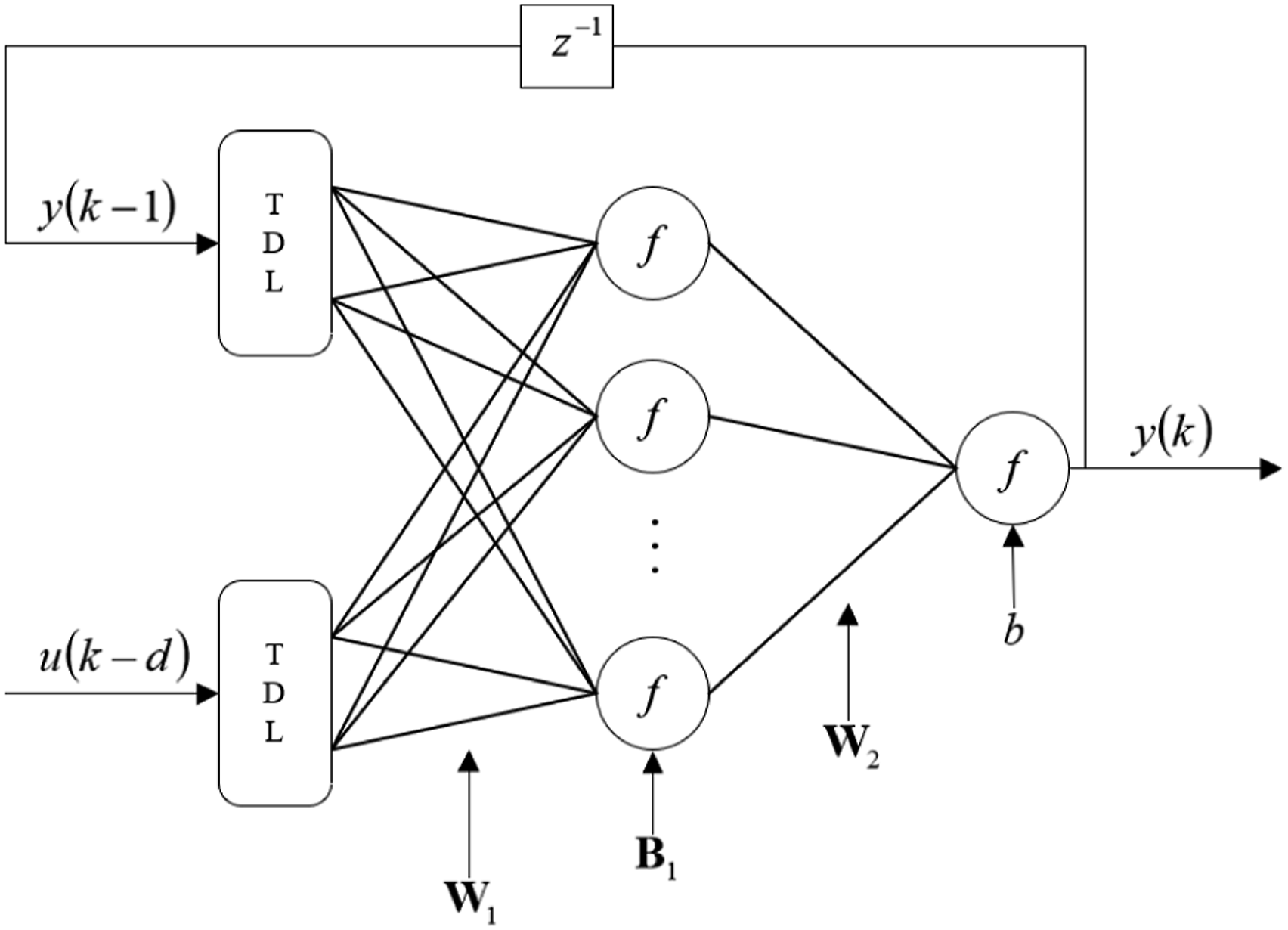
The gradient descent method is applied to train the network to get the appropriate network parameters, and the update formula of NARX neural network is derived by taking the network structure shown in Figure 2 as an example. Let the input k of the system be
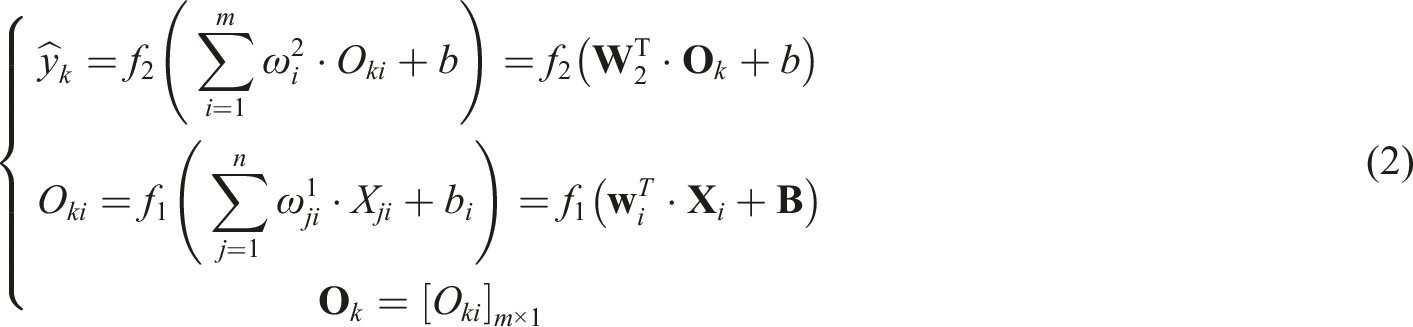
In equation (2),
Further the loss function is obtained as

In equation (3)
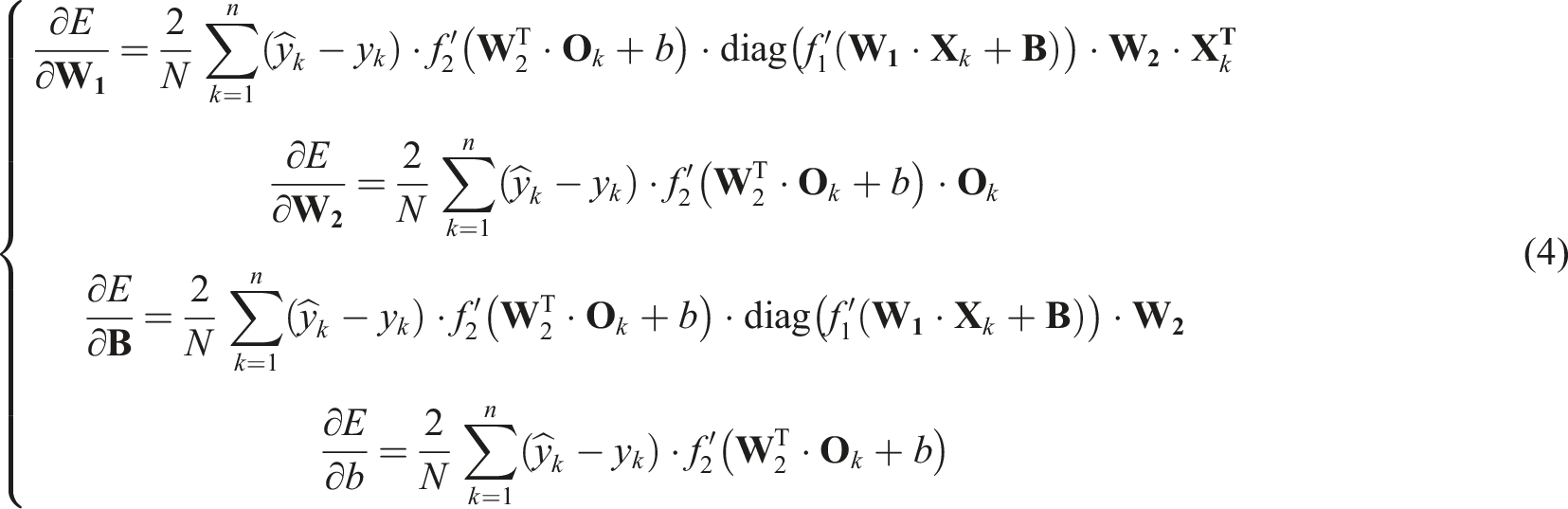
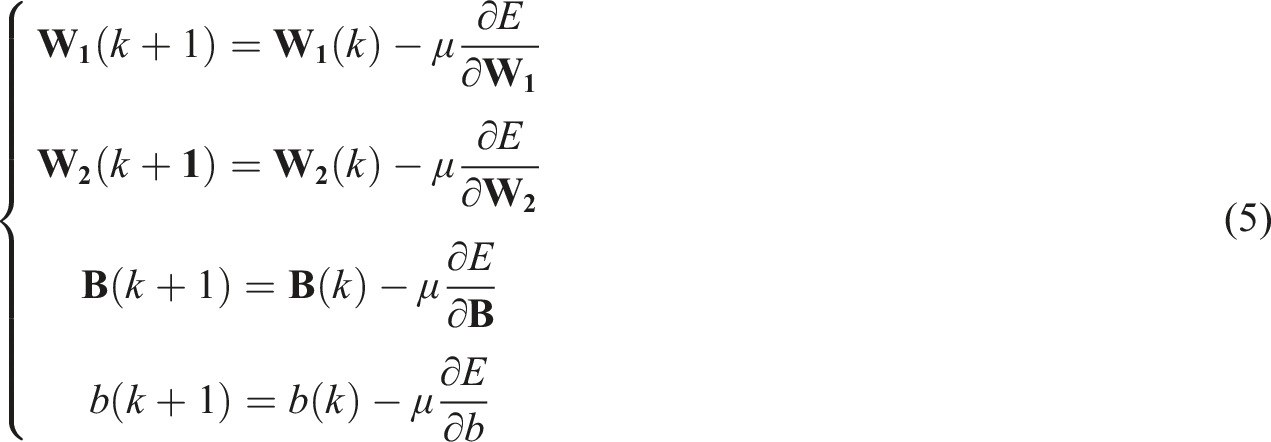
Update parameters in the network using gradient descent method
QPSO algorithm optimized NARX neural network
The neural network model maps the given input to the desired output through a complex network structure and a large number of network parameters, and the goal of network training is finding the appropriate mapping relationship. In the process of updating the parameters, due to the large number of network parameters and high dimensionality of the parameter space, the network is prone to fall into local optimal points and saddle points when searching for minimal values in the parameter space, as shown in Figure 3. The initialization parameters of the network training have a huge impact on the results of the network training. Using intelligent optimization algorithms to find the optimal initial parameters of the network to determine the better network parameters can reduce the probability of the network falling into the saddle point and improve the probability of the network converging to the global optimal solution. The effect of initialization parameters on network convergence results.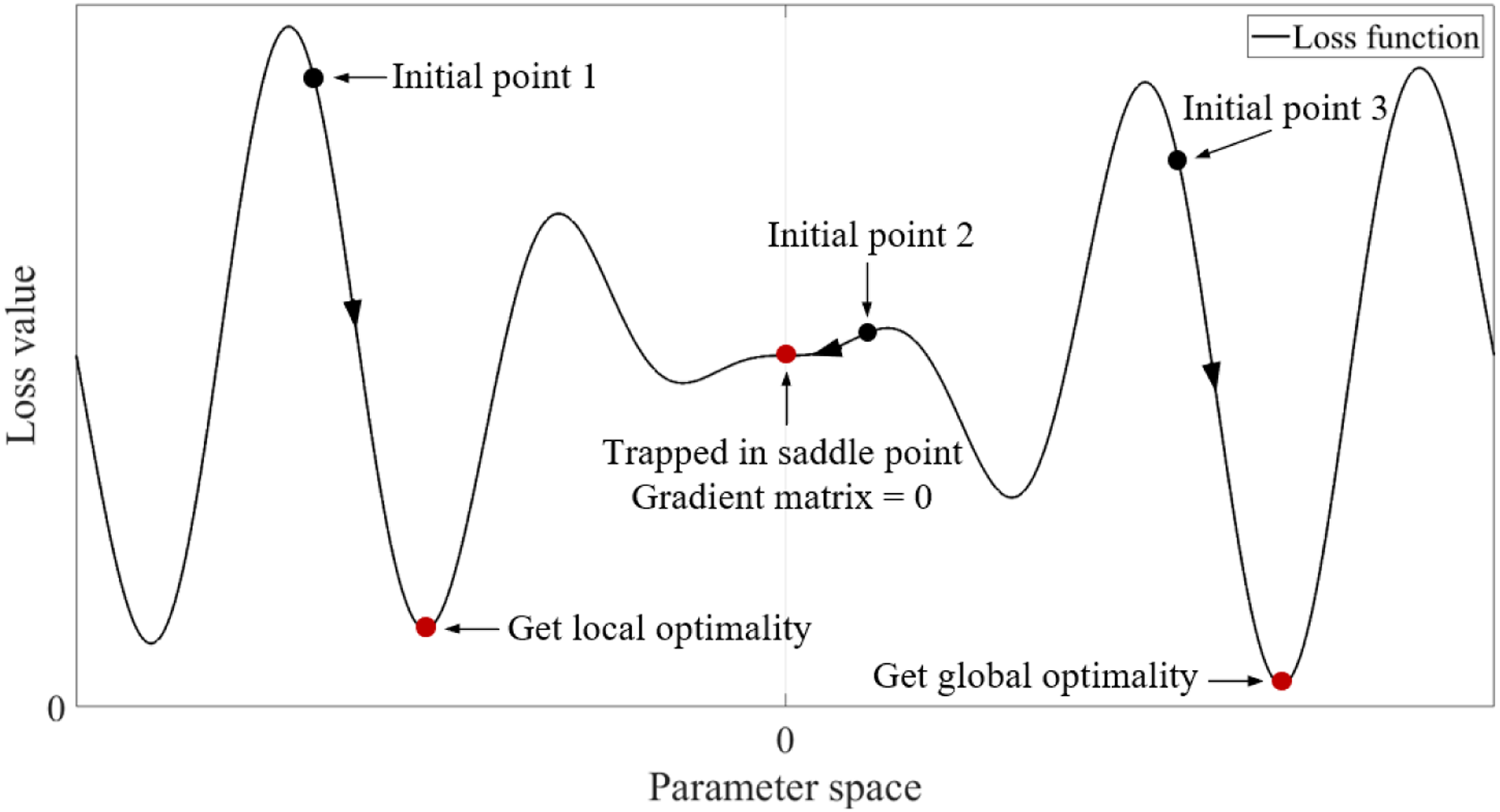
The particle swarm optimization (PSO) algorithm is a bionic optimization algorithm that mimics the predatory behavior of a flock of birds and finds the optimal solution through collaboration and information sharing among individuals in the group, which is widely used because of its simplicity of implementation and few parameters to be rectified. In order to overcome the problem that PSO easily falls into local optimum, scholars introduced the concept of wave-particle duality in quantum mechanics 23 so that the update of particle position in QPSO algorithm has almost no relationship with the previous motion of the particle, and the randomness of particle position becomes stronger, which makes the QPSO algorithm more easily to jump out of local optimum.
In the QPSO algorithm,

In equation (6)
Update the position of particles using equation (7) after getting the

In equation (7),
The flow chart for optimizing the initial parameters of the network using the QPSO algorithm is shown in Figure 4. QPSO algorithm optimizes flow chart of NARX NN parameters.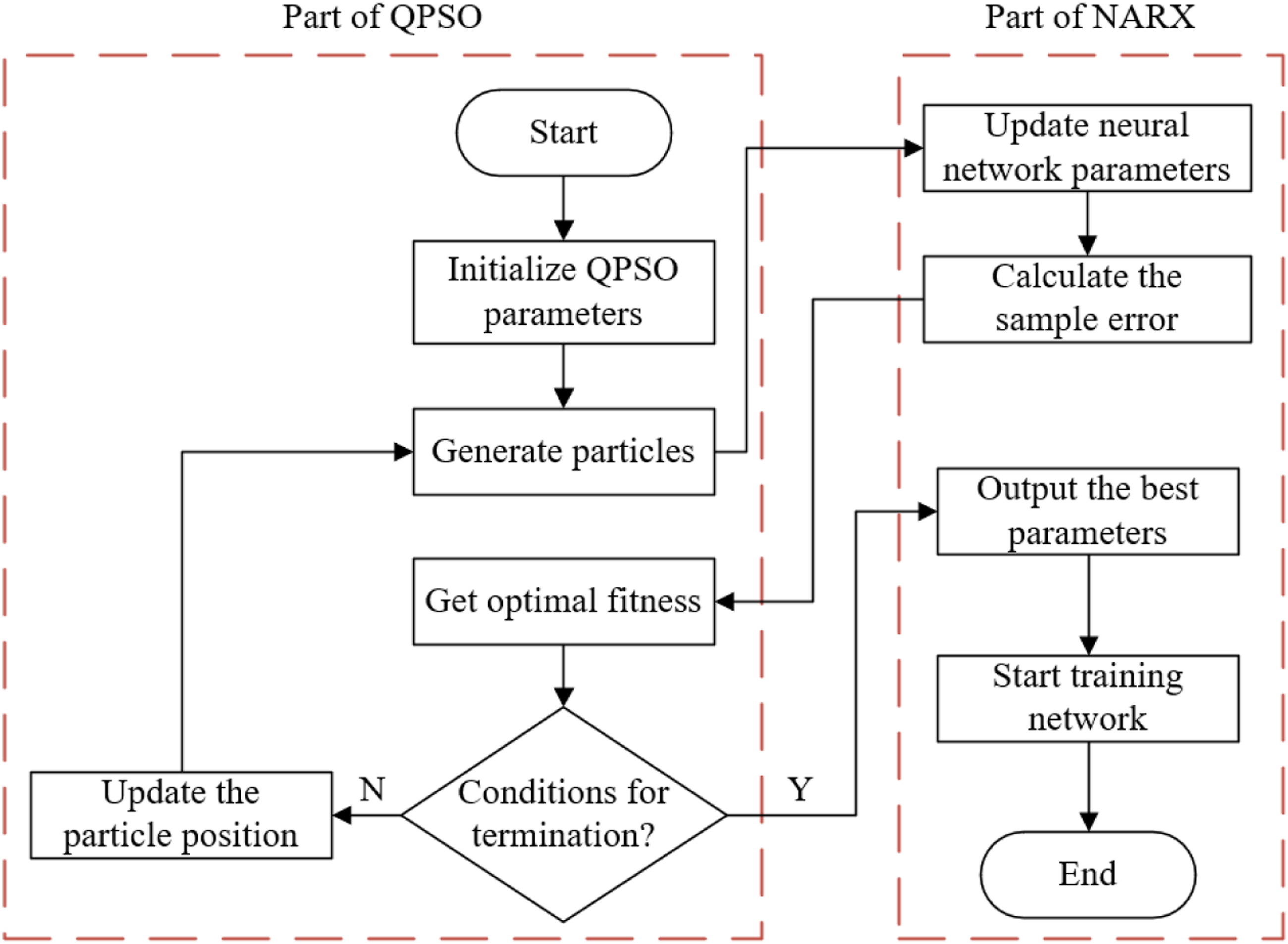
Block diagram of Fx-LMS control based on NARX neural network
The block diagram of the feedforward control algorithm using NARX neural network as the identify secondary channel model is shown in Figure 5, where Fx-LMS control block diagram with NARX NN and narrow-band filter.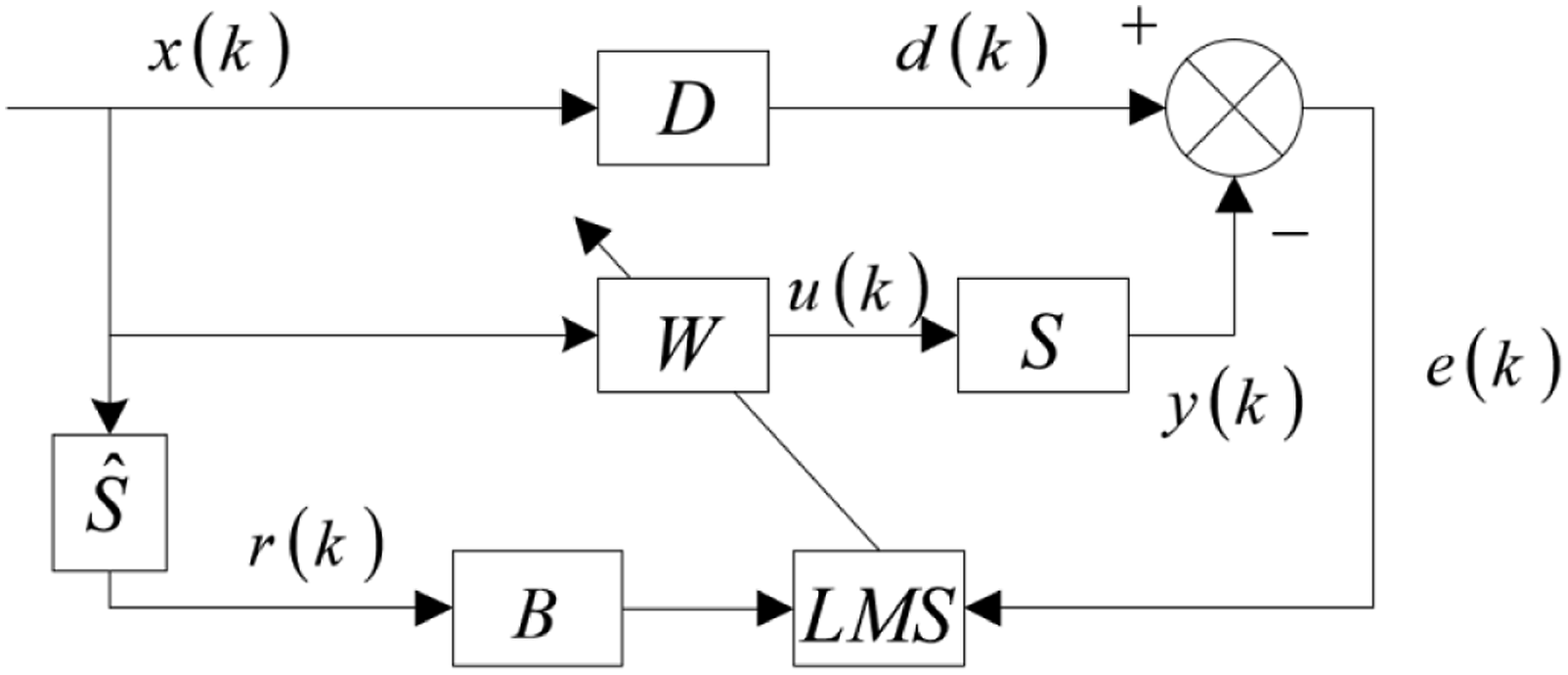
According to the control block diagram show in Figure 5, the actual identification system of the secondary channel at this point is

In order to obtain the most accurate identification secondary channel model possible, it is required that

Therefore, there are

Let the reference signal

Let the narrowband filter be

In equation (12), The spectrum of narrowband filter used in the paper.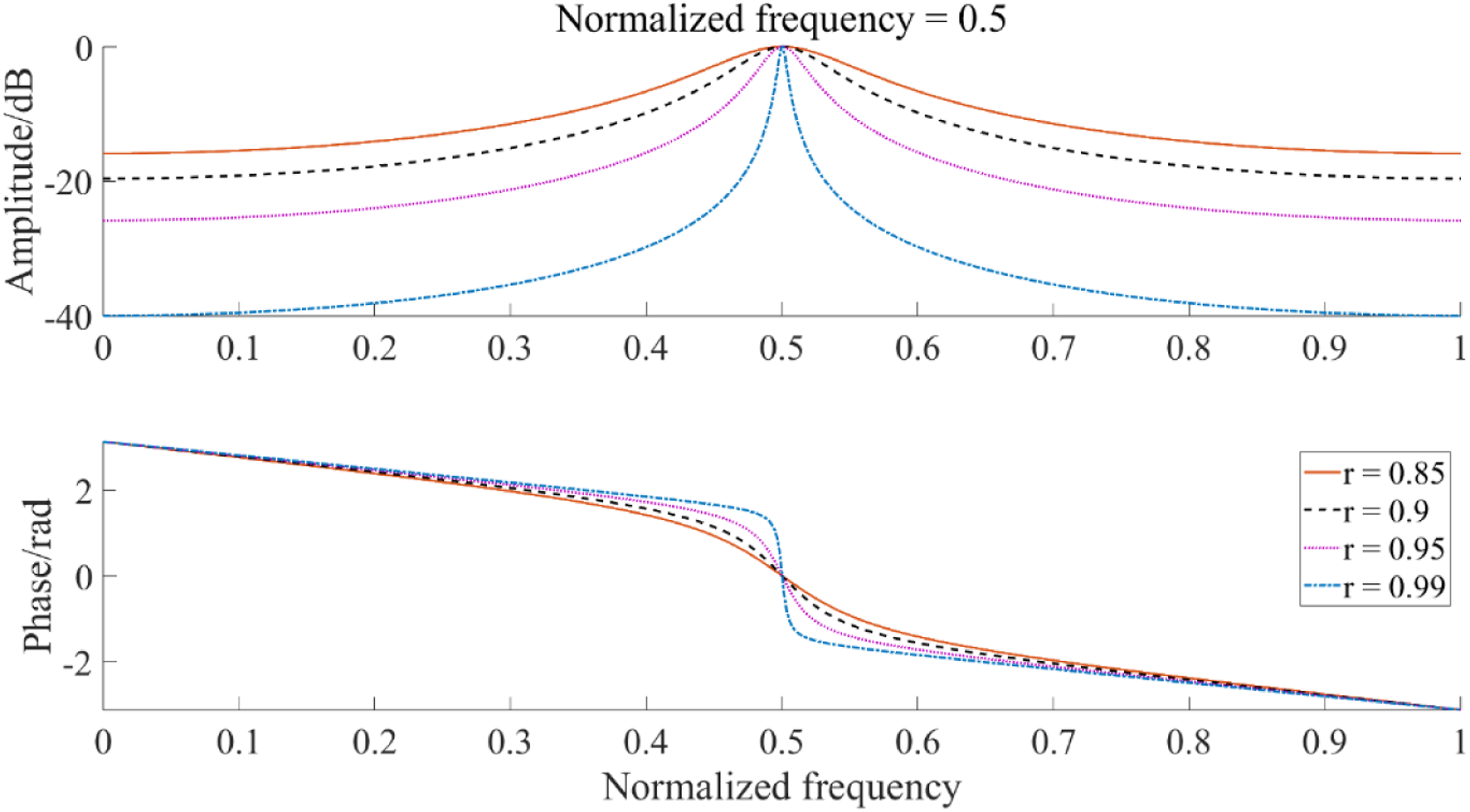
Simulation Analyze
Secondary channel system identification
In this paper, the active-passive hybrid vibration isolation platform was used as the research object, and the schematic diagram of the active-passive hybrid vibration isolation platform is shown in Figure 7. The main components of the active-passive hybrid vibration isolation platform include motor, rubber isolator, electromagnetic actuator, and acceleration sensors, where the rubber isolator was used as a passive vibration isolation system to isolate high-frequency vibrations, and the electromagnetic actuator was used as the actuator of the active control algorithm to isolate low-frequency periodic disturbances. The path from the input of the power amplifier to the output of the error acceleration sensor is the secondary channel. Schematic diagram of vibration data acquisition.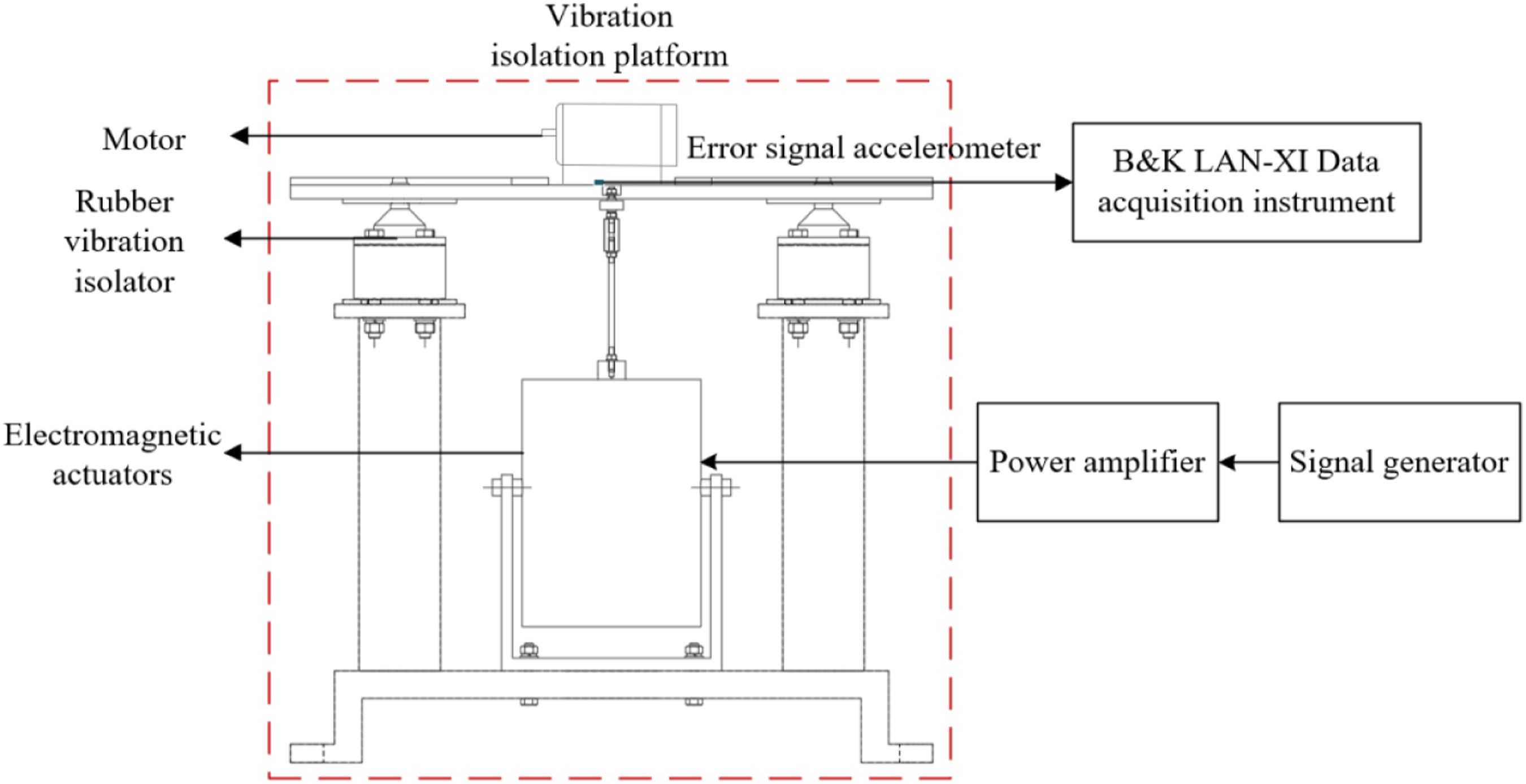
A swept frequency signal of 3 Hz–100 Hz was used as the excitation to collect the response of the secondary channel, and the data acquisition schematic is shown in Figure 7. The data acquisition process is as follows: when the motor not working, the signal generator generates a swept voltage signal with a length of 4 s, a frequency range from 3 Hz to 100 Hz, voltage value is 1Vrms and sampling frequency is 512 Hz. The voltage signal entered the power amplifier and converted into the corresponding current signal to drive the electromagnetic actuator to produce the active actuation force, which generates the corresponding acceleration response on the vibration isolation platform, and the acceleration signal was received by the error signal sensor and the error signal was obtained by the B&K LAN-XI data acquisition instrument. Then got the response of the secondary channel under the sweep excitation.
To examine the accuracy of the NARX neural network system identification, two sets of responses were acquired using single-cycle and double-cycle sweep excitation, respectively, as shown in Figure 8. Sweep excitation and response in secondary channel. (a) dual-cycle sweep excitation and response. (b) Single-cycle sweep excitation and response.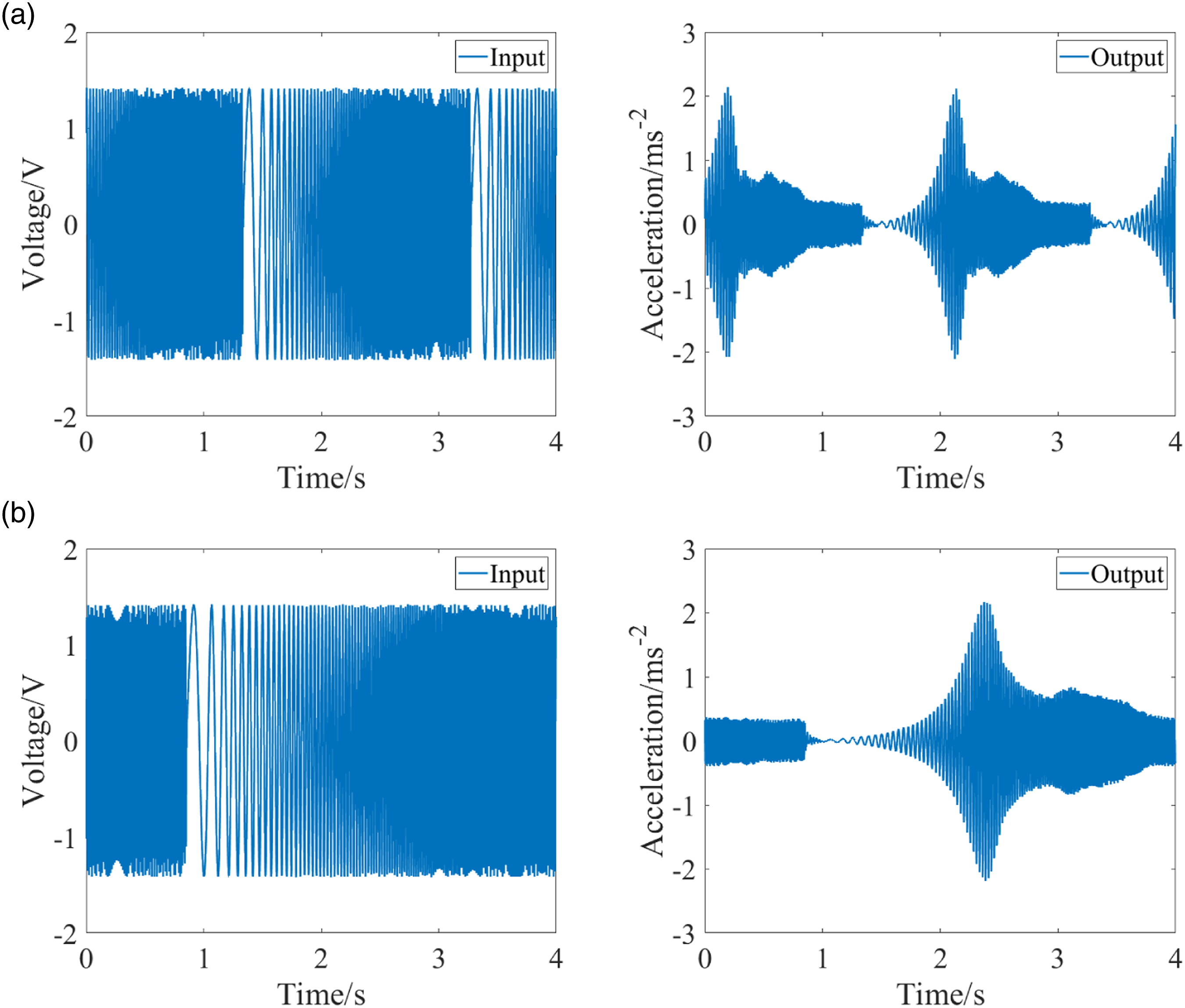
The corresponding data in Figure 8(a) was used as the network training set, and the data in Figure 8(b) was used as the test set to check the network training results. The number of neurons in each layer of the network needs to be determined in the network training, and in this paper, the number of input neurons is 20, the number of input neurons is 1, and the number of neurons in the hidden layer was obtained by the empirical formula, as shown in equation (13)

In equation (13), n and k are the number of neurons in the input layer and the number of neurons in the output layer, respectively. N = 20, k = 1, and a = 4 after experimental selection, and the number of neurons in the hidden layer is finally determined to be m = 5. Therefore, the parameters of the network training in this paper are: 20 neurons in the input layer, 5 neurons in the hidden layer, 1 neuron in the output layer, and the activation function of the hidden layer is Leaky ReLu, Batch Size = 2048, and learning rate 0.01.
The QPSO algorithm was used for optimizing the initial parameters of the neural network. The parameters of the QPSO algorithm are: the number of iterations is 500, the number of particles is 200, and the parameter Iterative fitness of QPSO and NARX neural network.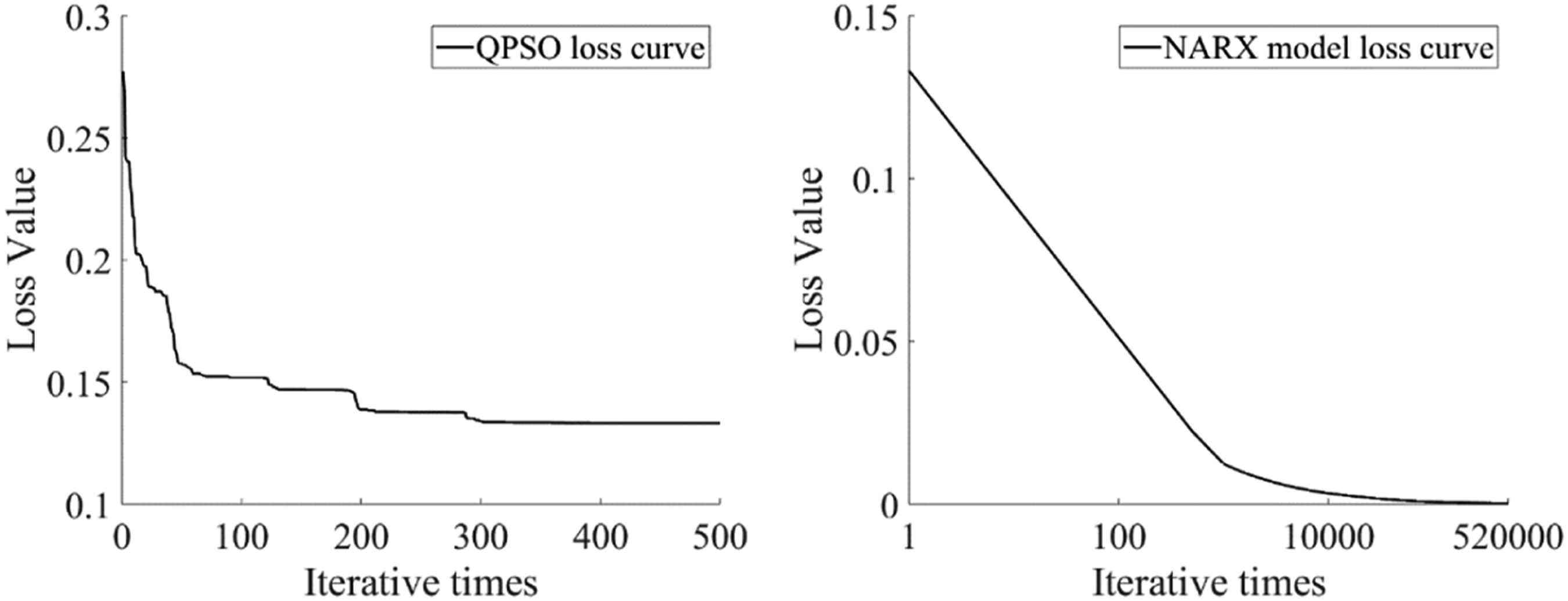
As can be seen from Figure 9, the QPSO algorithm converges after 300 iterations, and the optimal particle position obtained at this time was used as the initial value of the network for network training, and the network converges to a loss value of 3 × 10−4 after about 500,000 iterations.
The fitted curve of the network on the test set is shown in Figure 10 Time domain fitting curve of NARX neural network in dataset of test.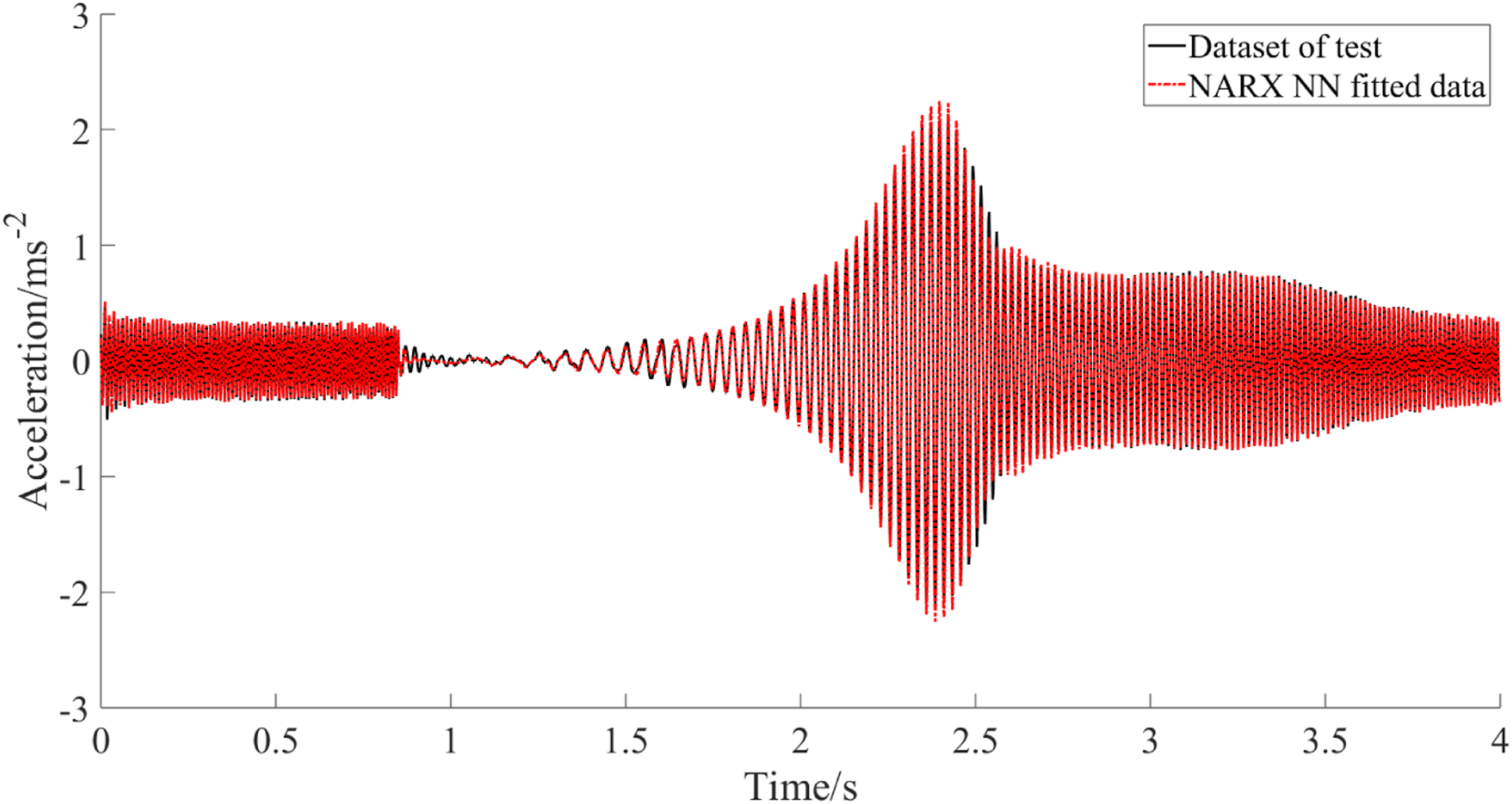
In order to compare the accuracy of the NARX neural network identification model with that of the traditional method, the 14-order ARX model was used to identify the secondary channels, and the comparison results are shown in Figure 11. The identifies spectrum of NARX NN and ARX model.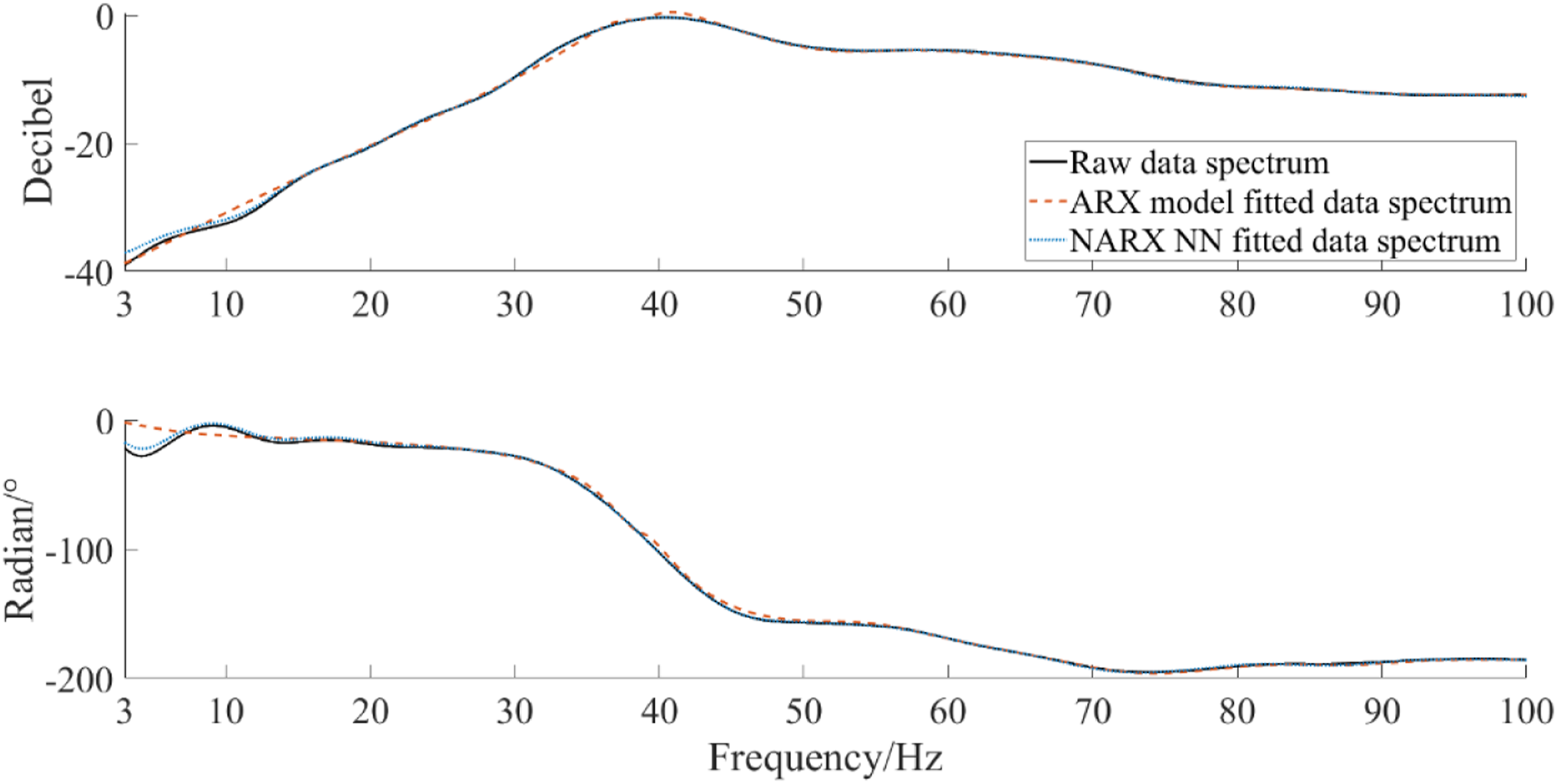
From the fitting results in the frequency domain of Figure 11, it can be seen that the model obtained from the ARX model identification and the real spectrum of the secondary channel have obvious errors at some frequencies, while the identification model obtained using the NARX neural network has a spectrum that almost coincides with the real spectrum in the range of 3 Hz–100 Hz.

Frequency domain fitness of NARX neural networks and ARX model.

From Figure 11 and Table 1, it can be seen that the NARX neural network-based fit is better, which is due to the powerful nonlinear fitting ability of the neural network on the one hand, and more parameters in the neural network model on the other hand, which makes the fitting ability of the system stronger; likewise, due to more parameters in the neural network model, its arithmetic power requirement is also higher, which needs to be taken into account in the actual application.
Single-frequency disturbance simulation
The secondary channel
Firstly, single-frequency periodic disturbance simulation was carried out, and the simulation parameters were set as follows: simulation time is 3 s, the initial value of the controller weight convergence step is 0.01, in the traditional Fx-LMS simulation, the identification secondary channel was converted to an 800th-order FIR filter. The controller length is 1024, the disturbance signal amplitude is 1, the phase difference with the reference signal was set to Simulation results of 30 Hz single-frequency disturbances. Simulation results of 35 Hz single-frequency disturbances.
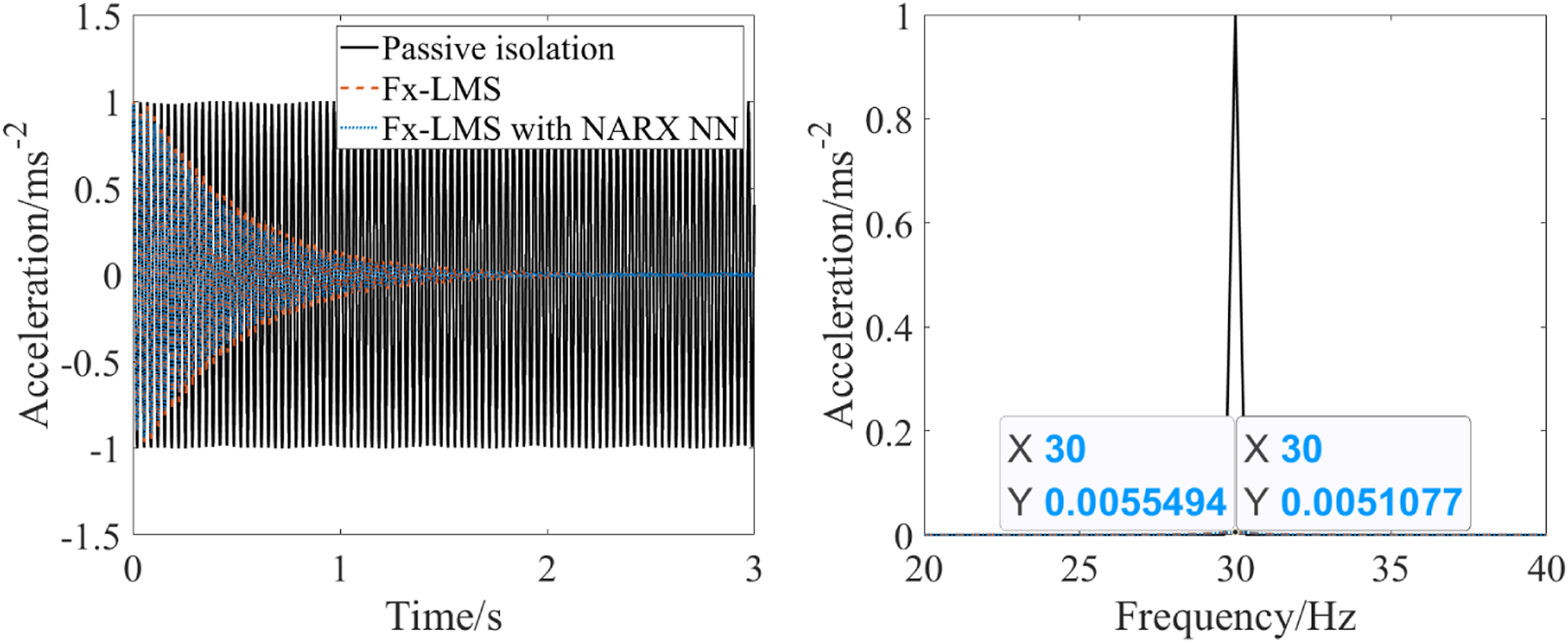
The simulation results of 30 Hz single frequency disturbance are shown in Figure 12. When the active control was turned on, both algorithms converge quickly and the error signal was reduced rapidly and reached stability. The vibration acceleration amplitude at the main frequency of 30 Hz before control is 1 m/s2; after using the traditional feedforward control algorithm, it was reduced to 0.0051 m/s2, a reduction of 99.49%; after using the feedforward control algorithm based on NARX neural network as the secondary channel identification model, the acceleration amplitude was reduced to 0.0055 m/s2, a reduction of 99.46%.
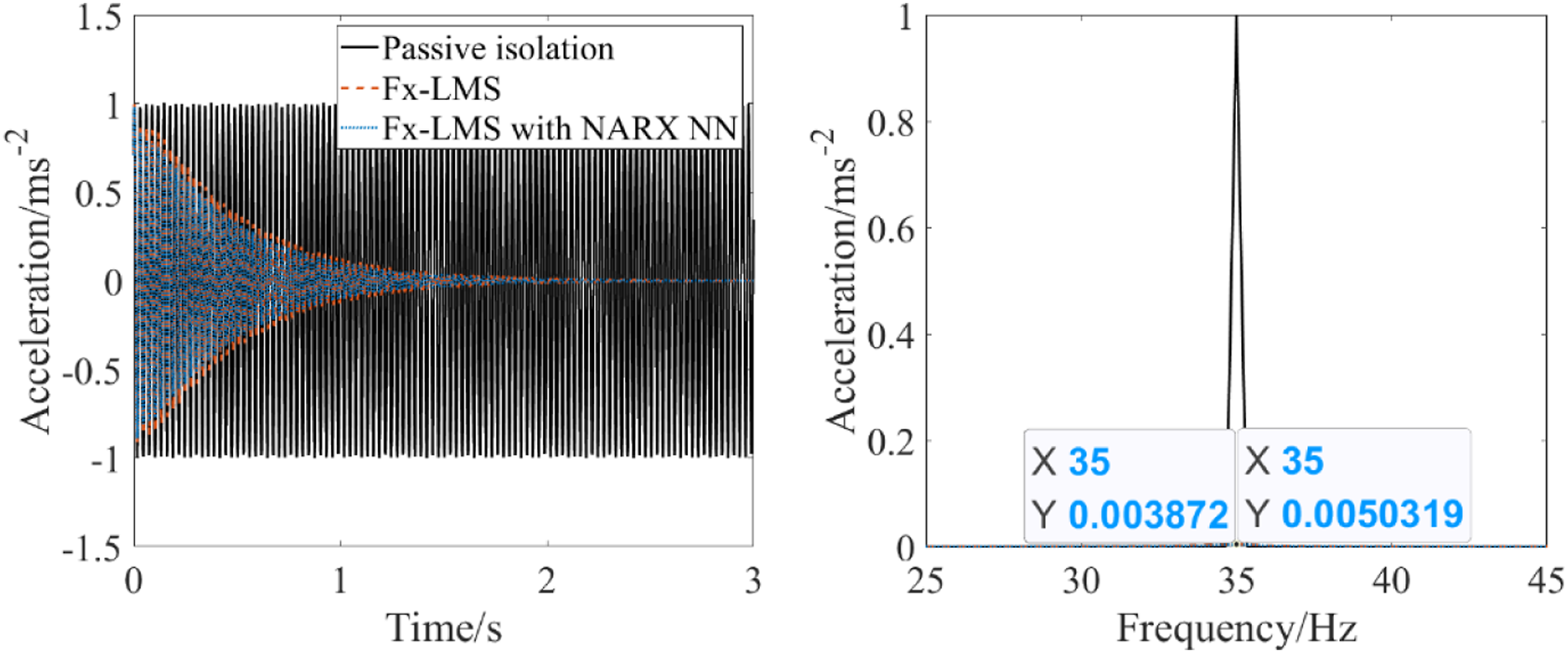
The simulation results of 35 Hz single frequency perturbation are shown in Figure 13. When the active control was turned on, both algorithms converge quickly and the error signal was reduced rapidly and reached stability. The vibration acceleration amplitude at 35 Hz primary frequency before control is 1 m/s2; after using the conventional feedforward control algorithm, it was reduced to 0.0050 m/s2, a reduction of 99.50%; after using the feedforward control algorithm based on the NARX neural network as the secondary channel identification model, the acceleration amplitude was reduced to 0.0038 m/s2, a reduction of 99.62%.
Comparison of single-frequency disturbance simulation results.

Dual-frequency disturbance simulation
Dual-frequency periodic disturbance simulation was carried out subsequently. The simulation parameters were set as follows: the simulation time is 6s, the initial value of the controller weight convergence step is 0.01, in the conventional Fx-LMS simulation, the identification secondary channel was converted to an 800th-order FIR filter, the controller length is 1024, the amplitude of the disturbance signal at both frequencies is 1, the phase difference with the reference signal was set to Simulation results of 30 Hz and 40 Hz dual-frequency disturbances. Simulation results of 35 Hz and 45 Hz dual-frequency disturbances. Comparison of dual-frequency disturbance simulation results.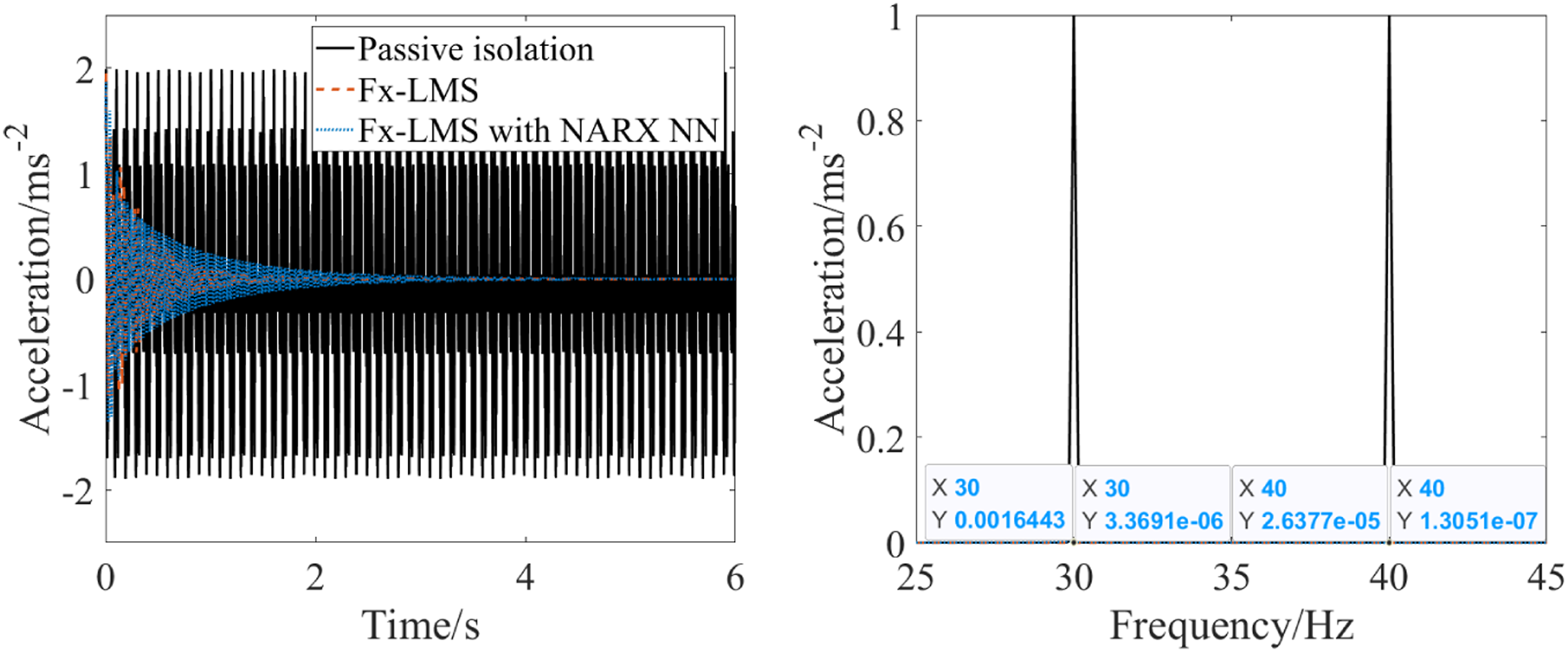

The simulation results of 30 Hz and 40 Hz dual-frequency disturbance are shown in Figure 14. When the active control was turned on, both algorithms converge quickly and the error signal was rapidly reduced and stabilized. The acceleration amplitude at the main frequency of 30 Hz and 40 Hz before the control is 1 m/s2 and 1 m/s2, respectively; after using the traditional feedforward control algorithm, the acceleration amplitude at the main frequency decays to almost 0, which was reduced by more than 99.99%; after using the feedforward control algorithm based on the NARX neural network as the secondary channel identification model, the acceleration amplitude at the main frequency of 30 Hz was reduced to 0.0016 m/s2 at 30 Hz and almost 0 at 40 Hz, with a reduction of more than 99.84% and 99.99%, respectively.
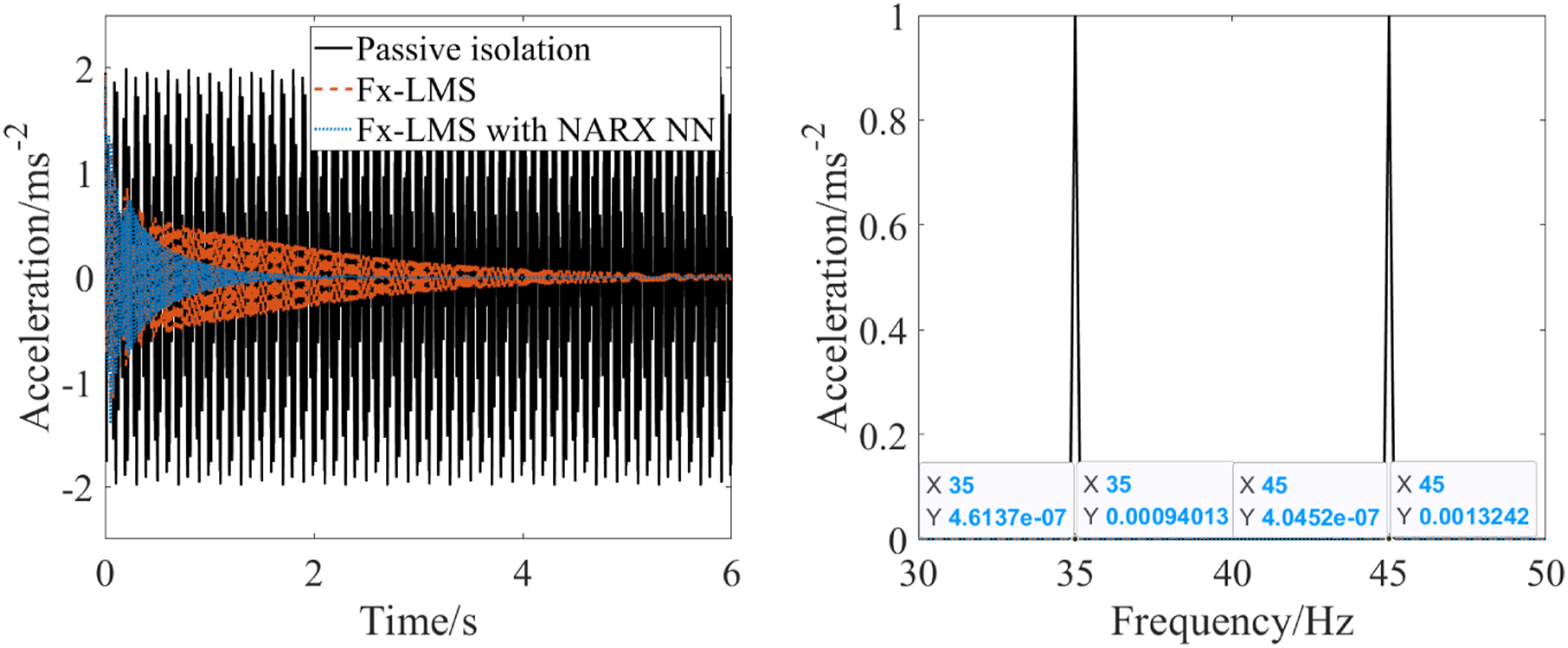
The simulation results of 35 Hz and 45 Hz dual-frequency disturbance are shown in Figure 15. Before the control, the acceleration amplitude at the main frequency of 35 Hz and 45 Hz is 1 m/s2 and 1 m/s2, respectively; after using the traditional feedforward control algorithm, the acceleration amplitude at the main frequency is 0.0009 m/s2 and 0.0013 m/s2, respectively, which was reduced by 99.91% and 99.87%; after using the feedforward control algorithm based on NARX neural network as the secondary channel identification model, the acceleration amplitude at the main frequency was almost decayed. After using NARX neural network as the feedforward control algorithm, the acceleration amplitude at the main frequency decayed to almost zero, and both were reduced by more than 99.99%.
The vibration damping indicators were calculated from the simulation data show in Figures 14 and 15 are shown in Table 3.
The results of single-frequency and dual-frequency disturbance simulations show that the Fx-LMS algorithm using the NARX neural network as the discriminative secondary channel can effectively achieve low-frequency vibration control. The simulation was carried out under ideal conditions as external influences are neglected in the simulation, so the Fx-LMS algorithm using both the ARX model and the NARX neural network model can achieve near ideal damping effects, and the effectiveness of the NARX neural network model identification will be further verified in the experimental validation.
Experimental verification
The active-passive hybrid vibration isolation platform built in this paper is shown in Figure 16. Active and passive hybrid vibration isolation platform and control system.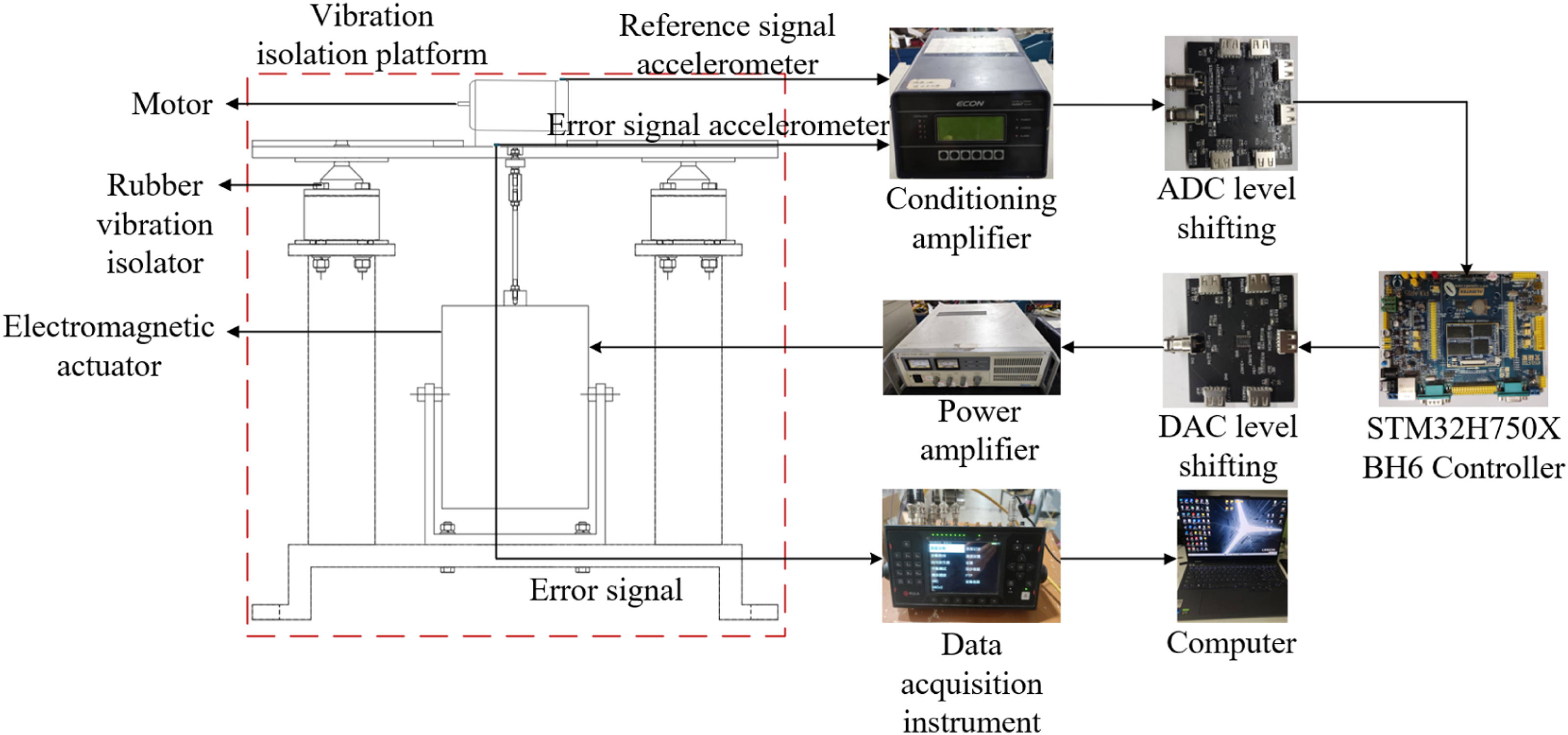
Single-frequency perturbation experiment
In order to simulate the single-frequency vibration noise generated by the power equipment on the ship, a motor was installed on the built active vibration isolation platform, and the working frequency of the motor is adjusted by a frequency converter. (Figure 17) Experimental platform of single-frequency disturbance.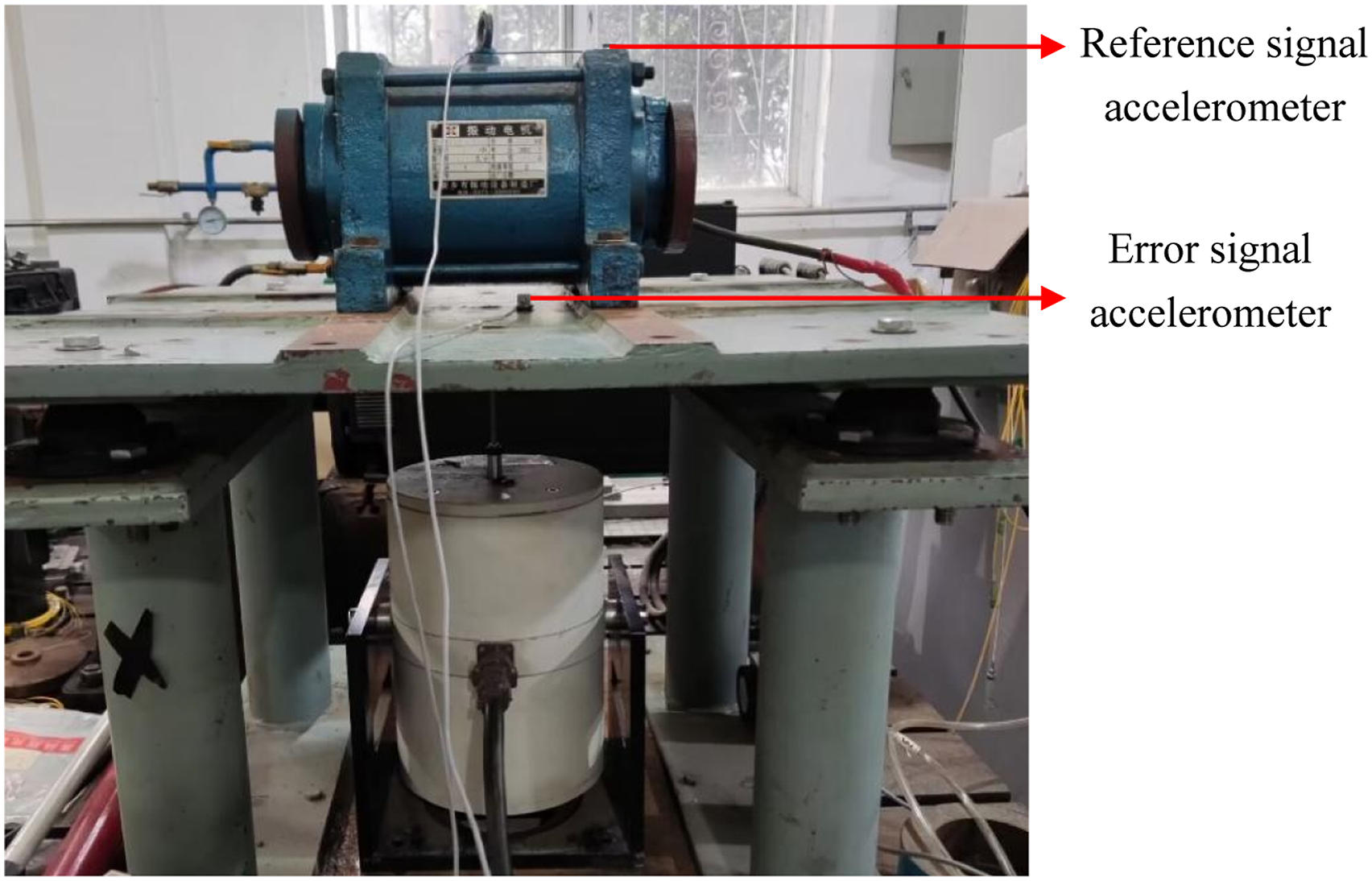
The operating frequency of the motor was adjusted to 25 Hz, 30 Hz, and 35 Hz using frequency converter, the parameters in the algorithm were set as follows: the initial value of the controller weight convergence step is 0.01, the length of the controller is 1024, the narrow band filter parameter was set to Experimental results of 25Hz single-frequency disturbance. Experimental results of 30 Hz single-frequency disturbance. Experimental results of 35 Hz single-frequency disturbance. Comparison of single-frequency disturbance experimental results.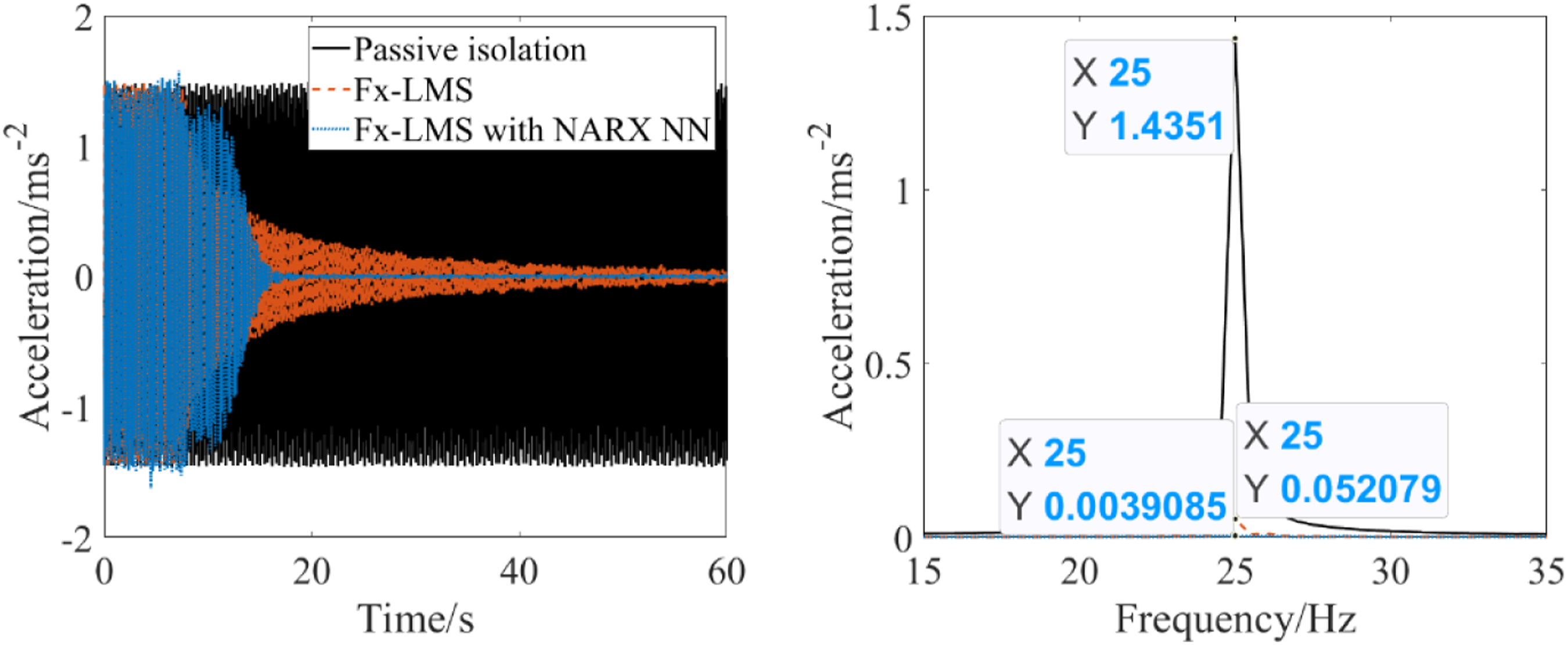

The experimental results of 25 Hz single-frequency perturbation is shown in Figure 18. When active control was turned on, both algorithms converge quickly and the error signal was reduced rapidly and reached stability. The vibration acceleration amplitude at 25 Hz main frequency before control is 1.435 m/s2; after using the traditional feedforward control algorithm, it was reduced to 0.0521 m/s2, a reduction of 96.37%; after using the feedforward control algorithm based on NARX neural network as the secondary channel identification model, the acceleration amplitude was reduced to 0.0039 m/s2, a reduction of 99.73%.
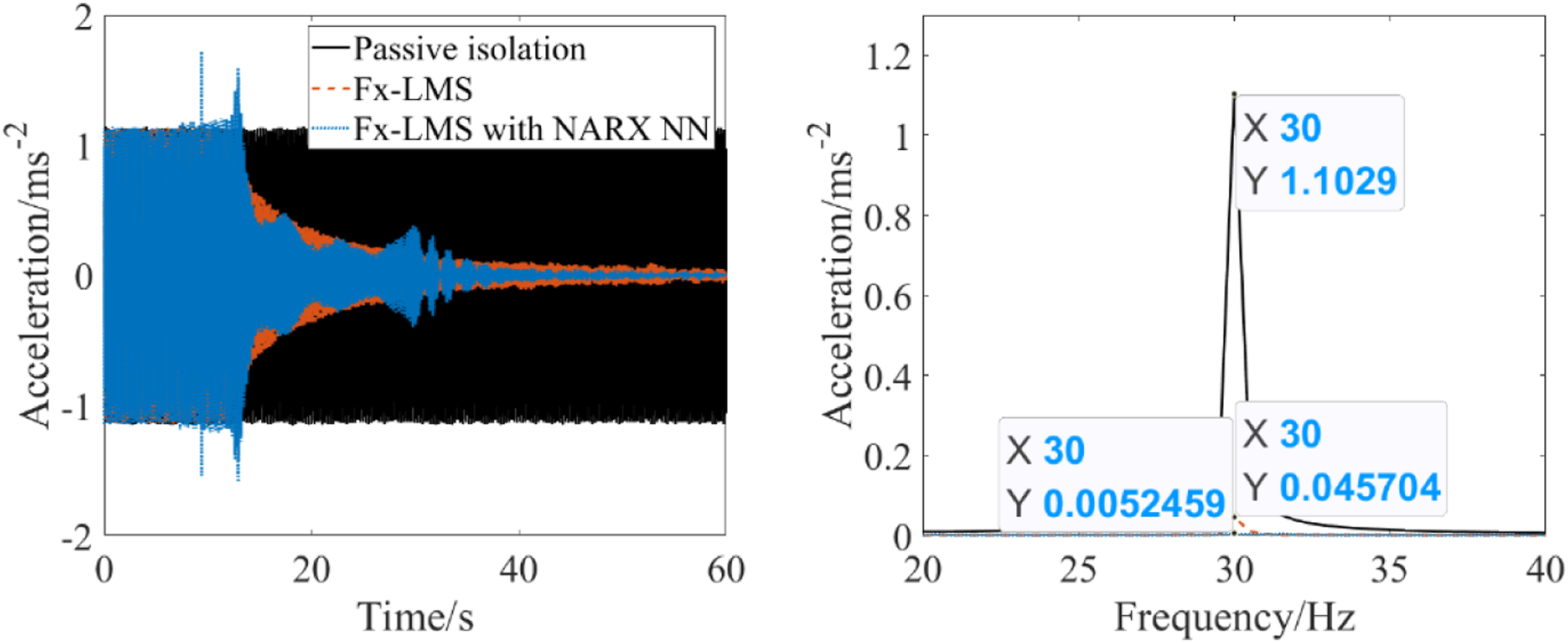
The experimental results of 30 Hz single-frequency perturbation is shown in Figure 19. When active control was turned on, both algorithms converge quickly and the error signal was reduced rapidly and reached stability. The vibration acceleration amplitude at the main frequency of 30 Hz before control is 1.103 m/s2; after using the traditional feedforward control algorithm, it was reduced to 0.0457 m/s2, a reduction of 95.92%; after using the feedforward control algorithm based on the NARX neural network as the secondary channel identification model, the acceleration amplitude was reduced to 0.0052 m/s2, a reduction of 99.53%.
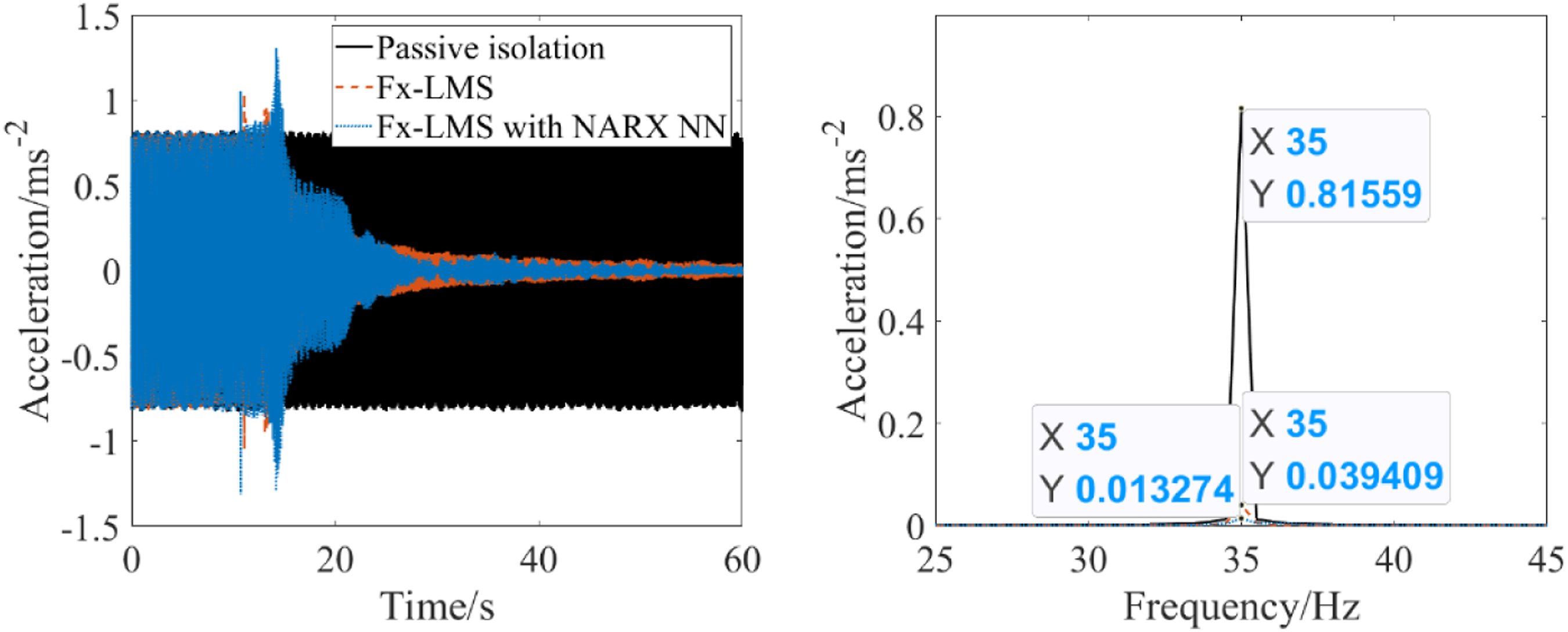
The experimental results of 35 Hz single frequency perturbation is shown in Figure 20. When the active control was turned on, both algorithms converge quickly and the error signal was reduced rapidly and reached stability. The vibration acceleration amplitude at 35 Hz main frequency before control is 0.816 m/s2; after using the traditional feedforward control algorithm, it was reduced to 0.0394 m/s2, which is 95.17%; after using the feedforward control algorithm based on NARX neural network as the secondary channel identification model, the acceleration amplitude was reduced to 0.0133 m/s2, which is 98.37%.
The vibration damping indicators were calculated from the simulation data shown in Figures 18 to 20 are shown in Table 4.
Dual-frequency perturbation experiment
In order to simulate the multi-frequency vibration noise generated by multiple power equipment working simultaneously on the ship, a motor was added to the built active vibration isolation platform, and a total of two motors were operated at different frequencies. The built active vibration isolation platform is shown in Figure 21, where the installation position of the error signal acceleration sensor is the same as that of the single-frequency disturbance experiment. Experimental platform of dual-frequency disturbance.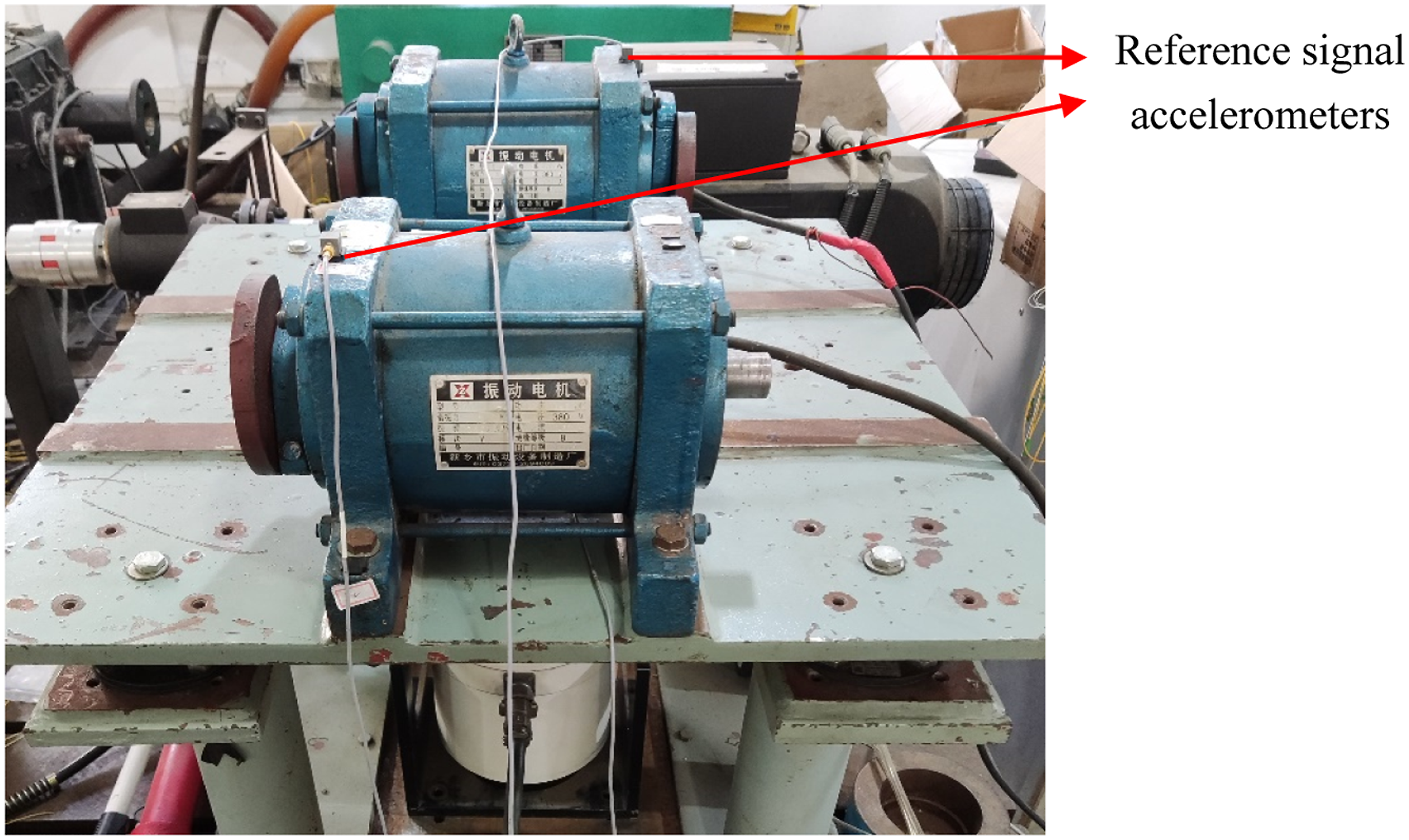
In the experiment, the operating frequencies of the two motors were adjusted to 20 Hz and 35 Hz, 25 Hz and 30 Hz, and 25 Hz and 40 Hz, respectively. The experimental parameters were set as follows: the initial value of the controller weight convergence step for the conventional feedforward algorithm is 0.015, and the initial value of the controller weight convergence step for the feedforward algorithm of the NARX neural network identification secondary channel is 0.01, and the controller length is 1024. Meanwhile, in order to accurately compare the experimental results, the data of the last 2s after the complete convergence of each algorithm were also taken to calculate the vibration reduction effect.
The experimental results of 20 Hz and 35 Hz dual-frequency perturbation are shown in Figure 22. When the active control was turned on, both algorithms converge quickly and the error signal decreased rapidly and reached stability. The vibration acceleration amplitude at 20 Hz and 35 Hz main frequency before control is 0.837 m/s2 and 0.445 m/s2, respectively; after using the traditional feedforward control algorithm, it was reduced to 0.0308m/s2 and 0.0020 m/s2, respectively, which is 96.32% and 99.55%; after using NARX neural network as the feedforward model for secondary channel identification, the acceleration amplitude was reduced to 0.0308 m/s2 and 0.0020m/s2, respectively. The acceleration amplitude was reduced to 0.0067 m/s2 and 0.0063 m/s2 with 99.20% and 98.59% reduction after using the feedforward control algorithm based on NARX neural network as the secondary channel recognition model. Experimental results of 20 Hz and 35 Hz dual-frequency disturbance.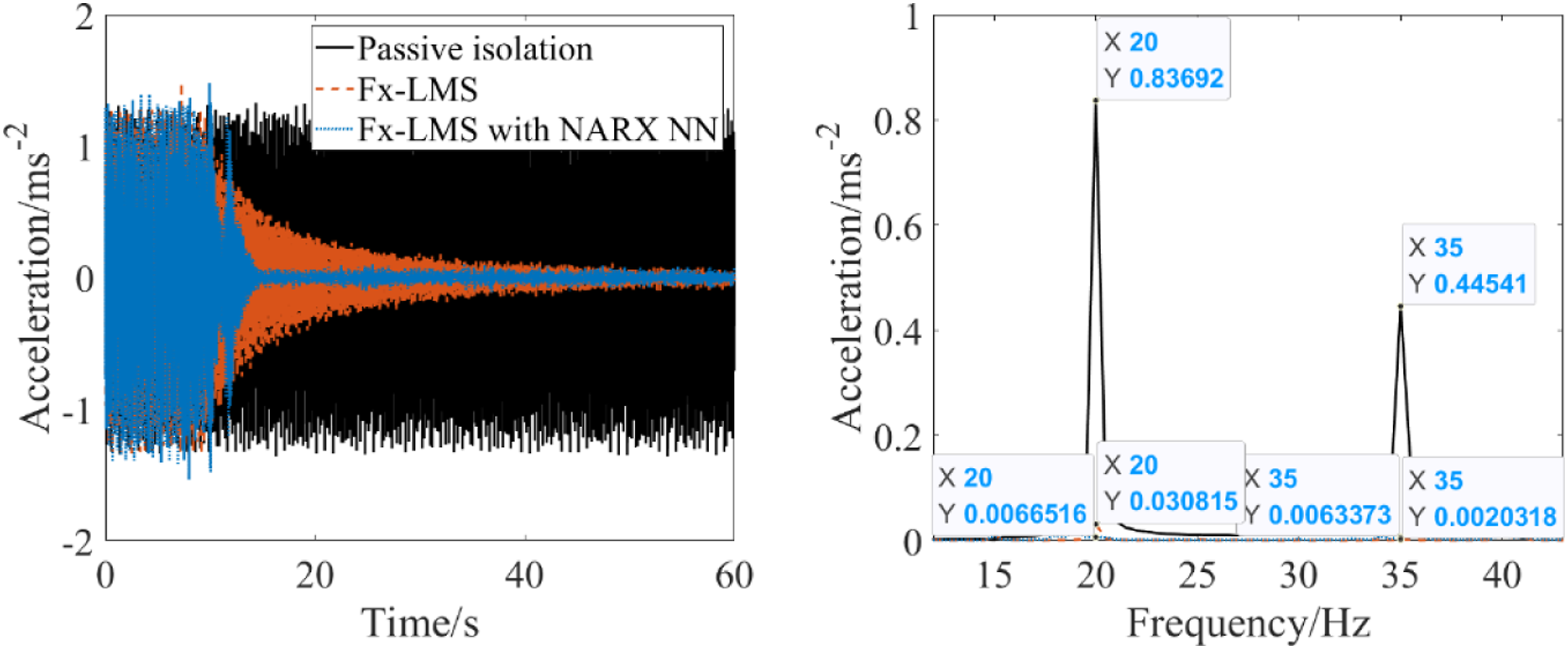
The experimental results of 25 Hz and 30 Hz dual-frequency perturbation are shown in Figure 23. When the active control was turned on, both algorithms converge quickly and the error signal decreased rapidly and reached stability. The vibration acceleration amplitude at 25 Hz and 30 Hz main frequency before control is 1.173 m/s2 and 0.266 m/s2, respectively; after using the traditional feedforward control algorithm, the acceleration amplitude was reduced to 0.0183 m/s2 and 0.0040 m/s2, respectively, which is 98.44% and 98.51%; after using NARX neural network as the feedforward model for secondary channel identification, the acceleration amplitude was reduced to 0.0183 m/s2 and 0.0040 m/s2, respectively. The acceleration amplitude was reduced to 0.0108 m/s2 and 0.0023 m/s2 with 99.08% and 99.14% reduction after using the feedforward control algorithm based on NARX neural network as the secondary channel recognition model. Experimental results of 25 Hz and 30 Hz dual-frequency disturbance.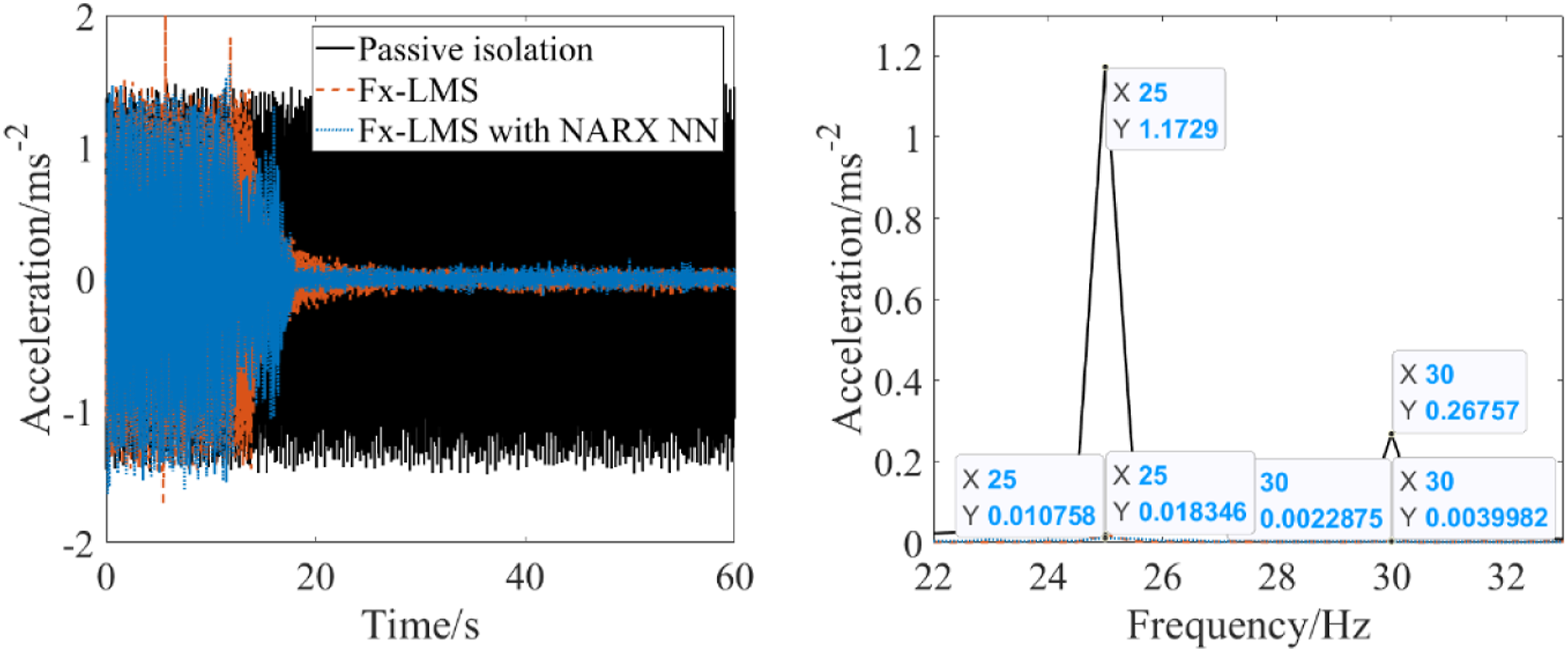
Comparison of dual-frequency disturbance experimental results.

Conclusion
In this paper, the NARX model was used for obtaining the identification model of the secondary channel in the vibration active control system. Compared with the identification model obtained from the linear ARX model, the identification accuracy of the amplitude and phase frequency characteristics of the NARX neural network is improved from 95.66% and 96.83%–99.33% and 99.03%, respectively, and the overall identification accuracy is greatly improved. The simulation results of vibration active control show that the Fx-LMS algorithm using NARX neural network for secondary channel identification can obtain the theoretically optimal feedforward controller.
The experiments of active control of vibration with single-frequency and dual-frequency perturbations were conducted on a single-layer active-passive hybrid vibration isolation platform, and the acceleration response values at the main frequencies were significantly reduced after the active control was applied. In the control method using the conventional Fx-LMS algorithm, the acceleration response at 25 Hz, 30 Hz, and 35 Hz decreased by 96.37%, 95.92%, and 95.17%, respectively. In the control method using the Fx-LMS algorithm based on the NARX neural network as the identification secondary channel, the acceleration response at 25 Hz, 30 Hz, and 35 Hz decreased by 99.73%, 99.53% and 98.37%, respectively. In the dual-frequency perturbation experiments, the conventional Fx-LMS algorithm achieved 96.32% and 99.55%, 98.44% and 98.51%, 98.83% and 97.87% acceleration amplitude reduction at 20 Hz and 35 Hz, 25 Hz and 35 Hz, and 25 Hz and 40 Hz, while the Fx-LMS algorithm using NARX neural network as the identification secondary channel achieved 99.20% and 98.59%, 99.08% and 99.14%, 98.39% and 99.46% acceleration amplitude reduction.
Comprehensive simulation and experimental results show that the Fx-LMS algorithm using NARX neural network as the secondary channel identification model can effectively suppress the periodic low-frequency disturbances generated by the ship’s power equipment, and the effect is better than the traditional Fx-LMS algorithm, providing a new method for the suppression of periodic low-frequency vibrations.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant numbers 51879209) and the Fundamental Research Fund for the Central Universities (China, grant numbers 2020-YB-026, WUT: 2021IVA117).