
Abstract
The free vibration responses are divergent based on a complex time-domain damping model. The traditional step by step integration method cannot be used to calculate the time-domain responses. Based on the theoretic solution that eliminates the divergent term for the complex damping model, the equivalent viscous damping model is proposed and the corresponding average acceleration method is realized in this paper. The numerical cases show that the calculated results of the equivalent viscous damped system are convergent, which are equal to the ones of the deleted divergent term based on the complex damping model. The correctness of the proposed method is verified, and the computational efficiency is high.
Keywords
Introduction
A complex damping model 1 is commonly an internal damping model, which is also called the structural damping model2,3 and frequency-independent damping model.4,5 The damping parameter of the complex damping model is the loss factor. The loss factor is the important parameter, which plays a critical role in the transient decay responses. 6 The loss factor can be obtained by a material damping test. The complex damping model is applied for dynamic analysis of engineering structures.7,8 The complex damping model is constructed based on the frequency-domain responses due to a harmonic wave. And the dissipated energy in each cycle is not related to the vibration frequency of the harmonic wave. The phenomenon is consistent with the experimental results of most materials. 9 The frequency-domain responses only include steady-state responses. Compared with the frequency-domain model, the time-domain model can be used to calculate both transient responses and steady-state responses. 10 The complex damping model is extended to the time-domain dynamic analysis. However, the calculated time-domain results are divergent. 11 The reason is that the free vibration responses are divergent. Therefore, how to overcome the divergent shortcoming is an important factor of the complex time-domain damping model.
A viscous damping model is another common internal damping model and the corresponding time-domain results are convergent. 12 However, the damping ratio is difficult to obtain. Combined with the advantages of the two damping models, the equivalent viscous damping model is constructed based on the material loss factor. To overcome the divergent phenomenon of the complex damped system, the equivalent viscous damping model is proposed based on the theoretic solution that eliminates the divergent term for the complex damping model. Based on the assumption of the average acceleration method, a time-domain method for free vibration responses of the equivalent viscous damped system is realized, which can be applied for single-degree-of-freedom (SDOF) and multiple-degree-of-freedom (MDOF) systems. The calculated results are convergent and have high computational efficiency.
Free vibration responses of the complex damped system
Based on the complex damping model, the time-domain equation for a SDOF system is expressed as
13


It is assumed that

Substituting equation (3) into equation (1), it is obtained as

The whole time history is discretized, and the time can be expressed as

The assumption of the average acceleration method is
14

Equation (6) is rewritten as


Substituting equations (7) and (8) into equation (4) gives
Solving equation (9), it is obtained as


Based on equations (7)–(11), the whole time history of free vibration responses can be obtained. The average acceleration method of complex damped systems is realized.
The numerical model is adopted to calculate the free vibration responses, which is defined as Model A. The natural frequency is 4 rad/s. The initial displacement is 20 cm and the initial velocity is 25 cm/s. Namely, The free vibration responses of complex damped system: (a) η is 0.05 and (b) η is 0.10.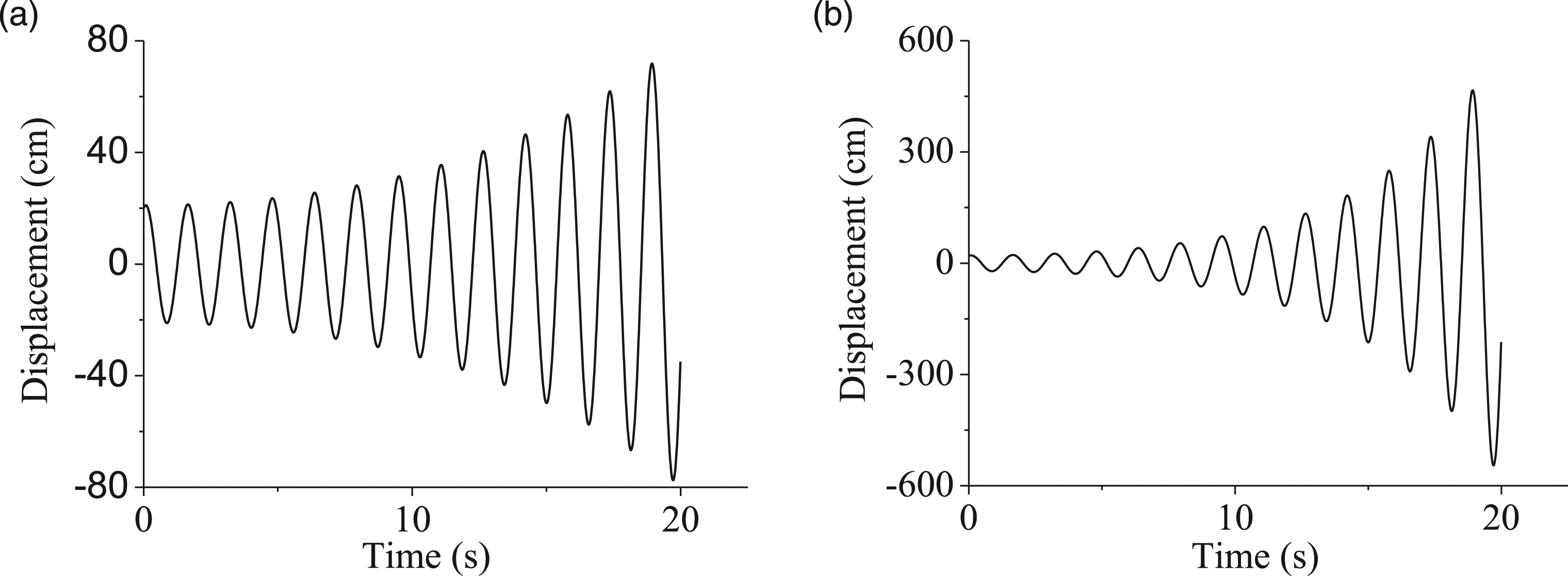
Figure 1 shows that the free vibration responses are divergent. The average acceleration method is unconditionally stable and convergent. So the divergent phenomenon is not caused by the calculated method but by the theory of the complex damping model. Besides, with the increase in the loss factor, the divergence becomes more serious. The complex damping model cannot be used to calculate the free vibration responses.
Free vibration responses of the equivalent viscous damped system
Divergent analysis of the complex damped system
The time-domain results of complex damped systems are divergent in Section 2. In the section, by means of the constant-transform method, the analytical solutions of the free vibration equation based on the complex damping model are obtained. Then, the divergent reason of the complex damping model is analyzed.
Based on the complex damping model, the corresponding free vibration equation for a SDOF system is expressed as

The corresponding characteristic equation of equation (12) is expressed as

By solving equation (13), the complex eigenvalues are obtained as

The displacement of a SDOF system is


Equation (15) shows that the expression of displacement contains an exponential growth term. It means that small-amplitude acoustic disturbances at any frequency will be exponentially amplified.
15
The growth rate of vibration responses is the important factor.
16
The growth item of free vibration responses is
Equivalent viscous damped system based on the complex damping model
In order to obtain the convergent free vibration responses, the equivalent viscous damping model is constructed. The free vibration equation of the equivalent viscous damped system is expressed as

The corresponding characteristic equation of equation (17) is expressed as

The exponential growth term is eliminated, and equation (15) is rewritten as

Based on equation (19), the complex eigenvalues are obtained as

Substituting equation (20) into equation (18) gives

By solving equation (21), the undetermined coefficients are obtained as

The time-domain equation of motion for the equivalent viscous damping system is

The average acceleration method is adopted, and the velocity and displacement are expressed as

Substituting equation (24) into equation (23), it is obtained as

Based on equations (24) and (25), the free vibration responses are obtained and the average acceleration method of equivalent viscous damped systems is realized. The calculation process is objective and the divergent term is not manually eliminated. Besides, compared with complex damped systems, the initial values of equivalent viscous damped systems are easily obtained, which do not need the dual item of the initial displacement and initial velocity. The initial values are the real parts of complex vibration responses.
Multiple-degree-of-freedom systems based on the equivalent viscous damping model
Based on the equivalent viscous damping model, the free vibration equation of a MDOF system is expressed as

The eigenvectors of equation (26) are

Based on the mode superposition method, the displacement is obtained as

Substituting equation (28) into equation (26), the equation can be decomposed as

Based on the average acceleration method of SDOF systems,
Numerical examples
Numerical example of SODF systems
In the traditional method, it is assumed that the loss factor is approximately twice the damping ratio.
17
Based on the viscous damping model, the corresponding free vibration equation for a SDOF system is expressed as

Based on equation (19), the convergent time-domain method based on the complex damping model (CTC) can be used to calculate the free vibration responses, and the results based on CTC are exact solutions. Based on equations (24) and (25), the average acceleration method based on the equivalent viscous damping model (AEV) can be used to calculate the free vibration responses. Based on equation (30), the average acceleration method based on the traditionally equivalent viscous damping model (TEV) can be used to calculate the free vibration responses. CTC, AEV, and TEV are compared. The mean value of time-domain displacements is selected as the index.
The relative error of mean value–based on AEV is

The relative error of mean value–based on TEV is

Model A is taken as the numerical model. The natural frequency is 4 rad/s. The initial velocity is 25 cm/s and the initial displacement is 20 cm. The loss factors are 0.10, 0.20, 0.40, and 0.60, respectively. The calculated results of CTC and AEV are shown in Figure 2. The corresponding relative errors of mean values based on AEV and TEV are shown in Table 1. The free vibration responses of Model A with different methods: (a) η is 0.10; (b) η is 0.20; (c) η is 0.40; and (d) η is 0.60. Relative errors of the mean values with different methods for Model A.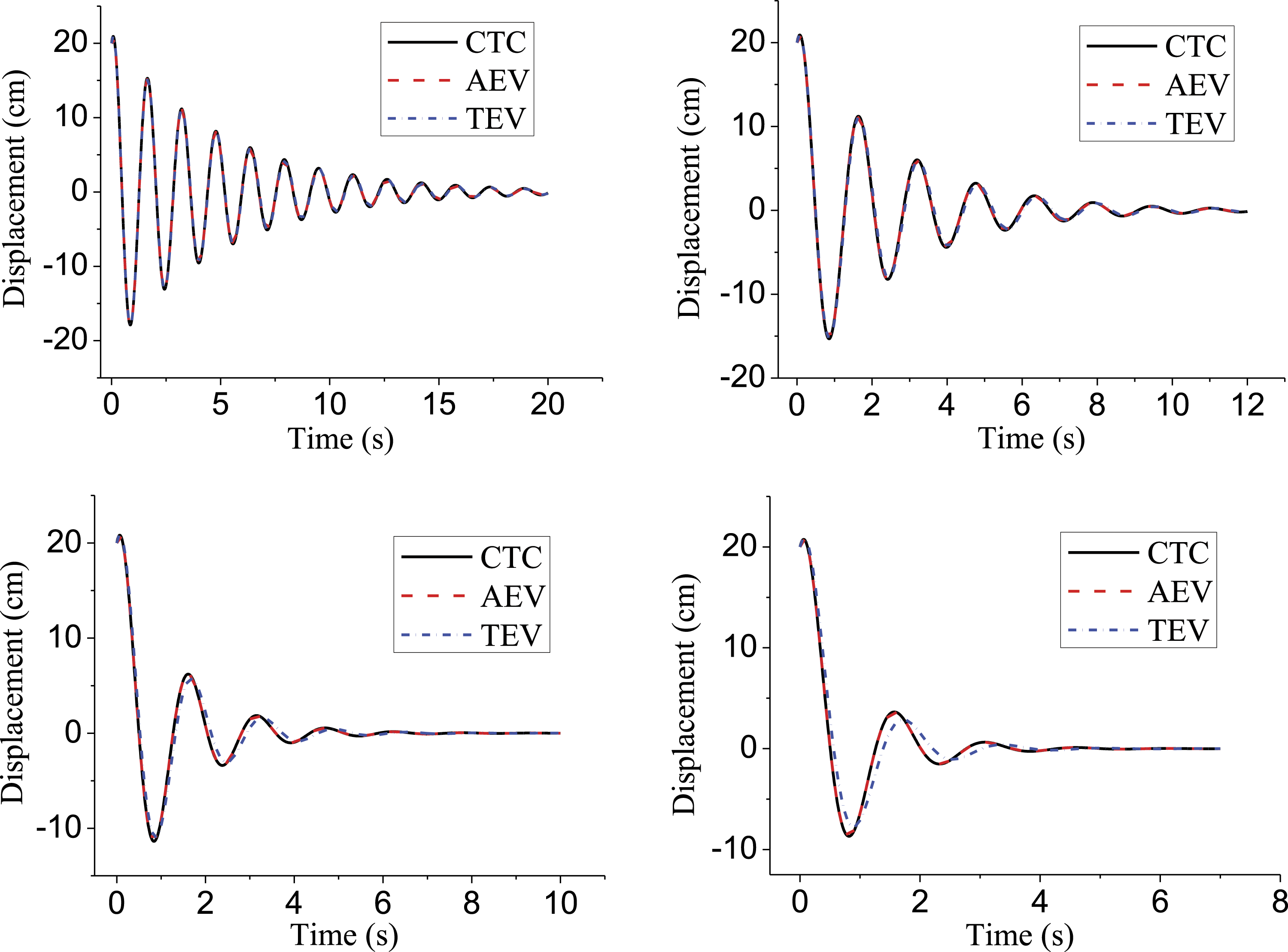

The calculated results of AEV are convergent, which is approximately equal to the ones of CTC. And the divergent shortcoming is overcome. With the increases in the loss factor, the convergent rate of time-domain responses is faster. The phenomenon is consistent with physical law. The correctness of AEV is verified. As the loss factor increases, the relative error of TEV increases gradually. When the loss factor is 0.60, the time-domain displacements of TEV are obviously different from the ones of CTC, and the relative error of the mean value of TEV is 19.23%. Different from AEV, TEV cannot be applied in large damping cases. AEV can be applied both in small and large damping cases.
Numerical example of MDOF systems
The 5-DOF model is taken as the numerical example of a MDOF system, which is defined as Model B. The mass and stiffness distribution are shown in Figure 3. The loss factors of Model B are 0.10, 0.20, 0.40, and 0.60, respectively. Schematic of Model B.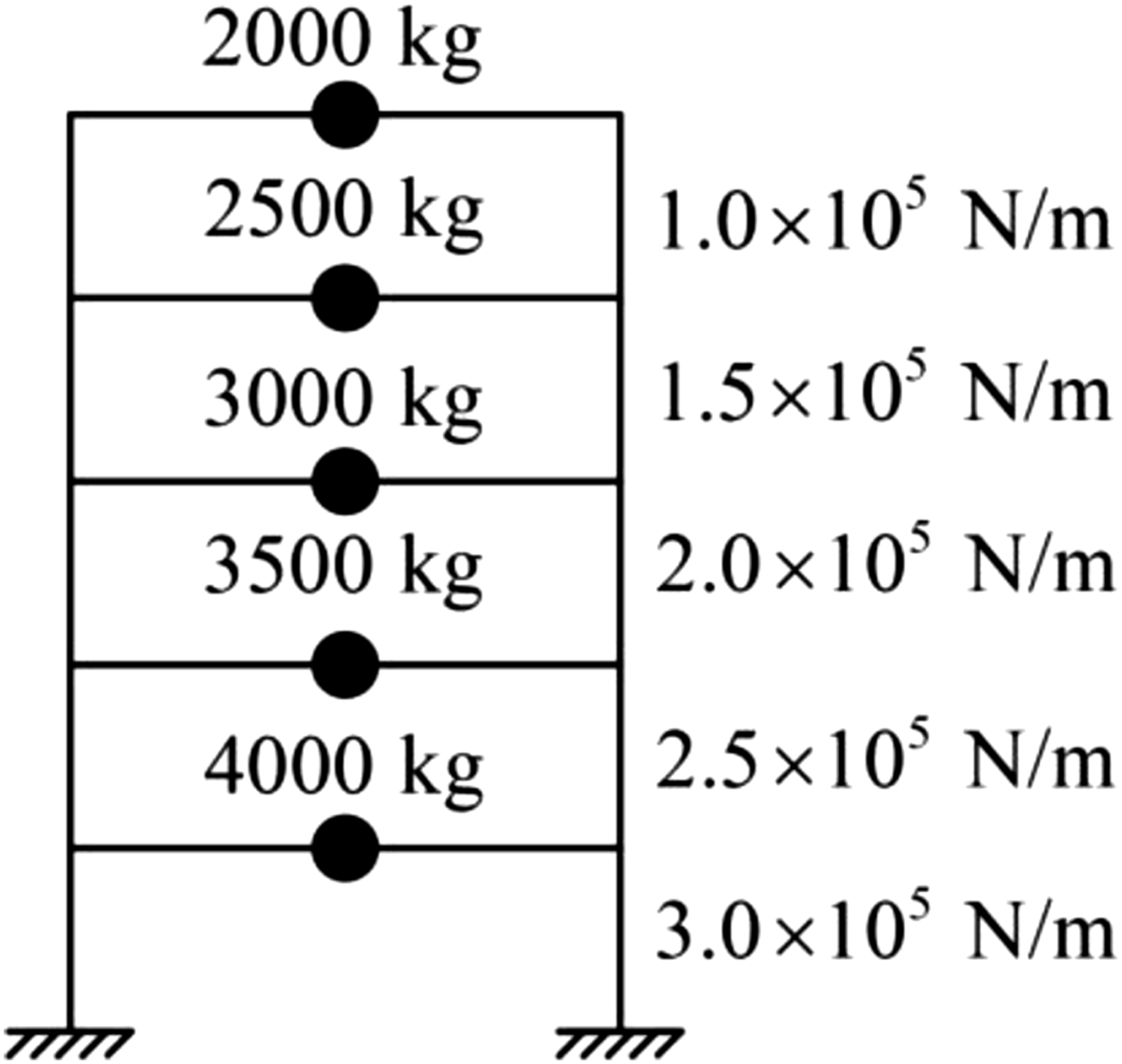
For Model B, the initial velocity vector is
The initial displacement vector is
CTC and AEV are used to calculate the top displacement of Model B, respectively. The corresponding time-domain results are shown in Figure 4. The calculated results of AEV are convergent, which is approximately equal to the ones of CTC. The law is similar to the one of SDOF systems. The top free vibration responses of Model B with different methods: (a) η is 0.10; (b) η is 0.20; (c) η is 0.40; and (d) η is 0.60.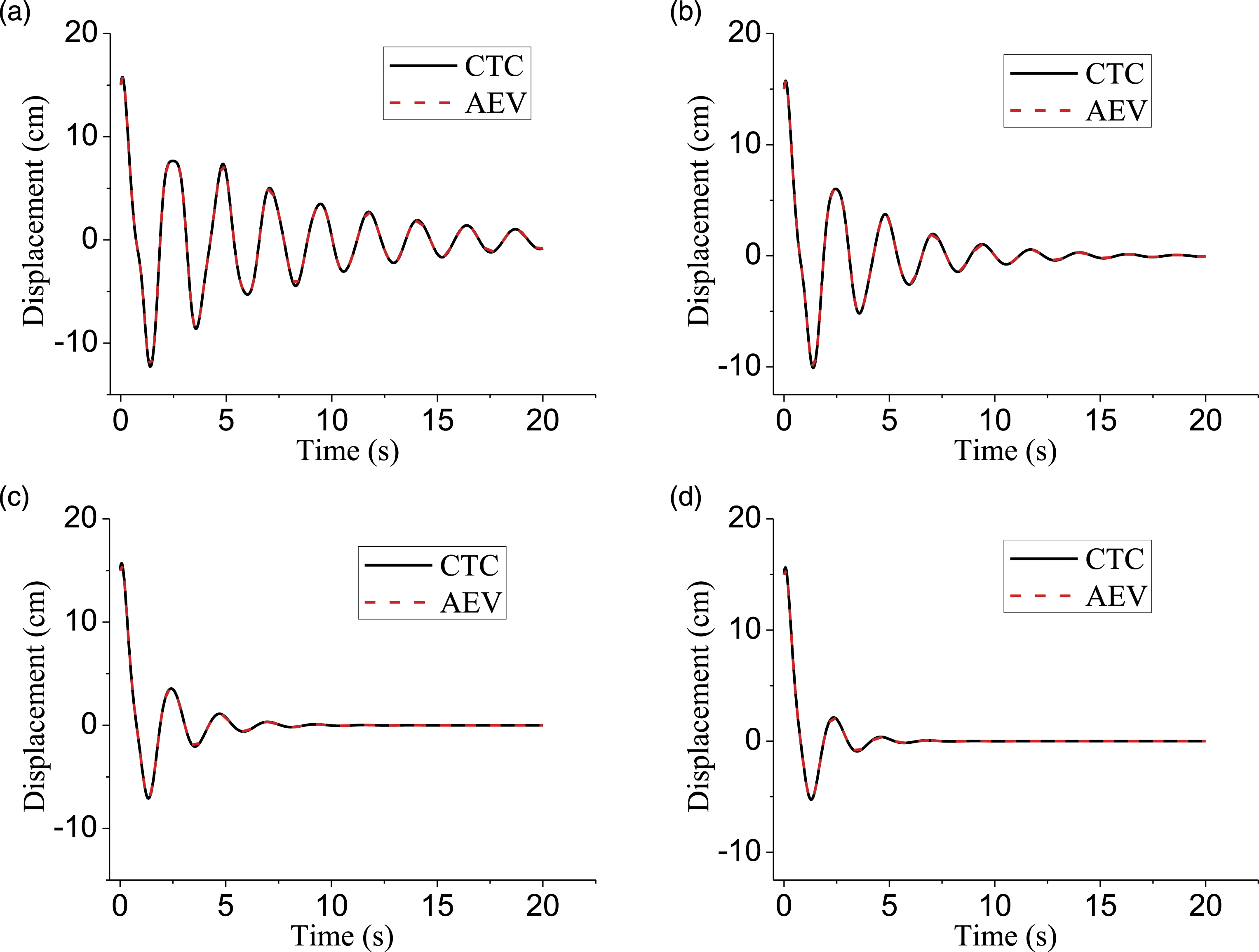
The computing time with different methods (unit: s).

Discussion and conclusions
The complex damping model cannot be directly applied in time-domain analysis, and the free vibration responses are divergent. Based on the theoretic solution that deletes the divergent term for the complex damping model, the equivalent viscous damping model is proposed in this paper.
Based on the assumption of the average acceleration method, a time-domain method for free vibration responses of the equivalent viscous damped system is realized, which can be applied for SDOF and MDOF systems. The numerical cases show that the calculated results of the equivalent viscous damped system are convergent, which are equal to the ones of the deleted divergent term based on the complex damping model. The correctness of the proposed method is verified. Compared with the approximately equivalent method, the proposed method is precisely equivalent method, which can be applied both in small and large damping cases. Besides, the proposed method is the time-domain integration method and has higher computational efficiency.
The proposed equivalent damping model can provide a basis for the expansion of the complex damping model in the time-domain analysis. In future work, the improved time-domain method will be studied based on the short-time Fourier transform, wavelet transform, etc.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was partially supported by the National Natural Science Foundation of China (Grant No. 51878621), Science and Technology Research Project of Henan Province (Grant No. 222102230010), China Postdoctoral Science Foundation (Grant No. 2022M712905), Natural Science Foundation of Henan Province (Grant No. 222300420316), and Key Research Projects of Henan Higher Education Institutions (Grant No. 22A560005).