
Abstract
In this paper, a nonlinear vibrating dynamical system of two degrees-of-freedom is examined. By virtue of the generalized coordinates, the controlling system of motion is constructed using Lagrange’s equations. Among other perturbation approaches, the technique of multiple scales (TMS) is utilized to get the required solutions analytically of this system till the third approximation. These solutions allow us to discuss the system’s behavior and realize both the solvability requirements and the modulation equations in the context of the system’s resonance scenarios. The resonance curves and solution diagrams are drawn to demonstrate the influence of the various parameters of the behavior of the considered system. The stability and instability of the gained possible fixed points are examined. The used method is considered traditional, but it is applied to a certain specified model. Therefore, the obtained outcomes are considered novel. The importance of this work is represented in its various applications in practical life, such as the motion of railway vehicles, for transporting goods in ports, and for facilitating the movement of passengers’ baggage at airports.
Introduction
Many scientific researchers1–16 have looked at dynamical pendulum models with 2DOF or 3DOF. The reason goes back to their importance in various domains of nonlinear dynamical systems such as industrial applications, biology, and medicine.
The motion of a 2DOF nonlinear spring subjected to the action of two external forces is examined in Awrejcewicz et al. 1 The authors addressed the analytical strategy of this problem using the TMS. However, its generalization is found in Amer et al. 2 when the pendulum’s pivot point has a path of an ellipse. The damped motion of a linear spring in the presence of a force along the spring’s direction and two opposite moments at its pivot point to move in a circular path is investigated in Starosta et al. 3 The case of the elliptic route is examined in Amer et al. 4 Two perturbation approaches are used in Kamińska et al. 5 to gain the asymptotic solutions (AS) of the equations of motion (EOM) for a nonlinear spring subjected to a resistance related with the velocity and one torque at the pivot point. The nonlinear motion of a damped elastic rigid-body-pendulum (RBP) is investigated in many works of literature, for example, Awrejcewicz et al., 6 Amer et al., 7 Amer et al., 8 He et al., 9 and He et al., 10 whether its suspension point may be fixed or moving in various routes. Utilizing the TMS, the AS of the EOM are gained and plotted versus time to examine the behavior of the models’ motions. The strategy of classification of resonance cases is presented. Two or more of these cases are studied simultaneously.
On the other hand, the planar rotatory motion of two RBP is examined analytically in El-Sabaa et al. 11 (when a Lissajous curve is considered as a route of its pivot point) and in Abdelhfeez et al. 12 (for the case of stationary suspension point). The stability conditions of Routh–Hurwitz are used to examine the fixed points’ stability of the solutions in the case of steady-state. The stability regions are estimated and discussed in light of the numerical solutions of the ME. While the numerical solutions of two or three magnetic RBP with fixed suspension points are examined in Wojna et al., 13 Awrejcewicz et al., 14 Awrejcewicz et al., 15 and Awrejcewicz et al. 16
The analytic approximation solutions of the EOM of such systems can be obtained using perturbation techniques.17,18 Because of their high accuracy, TMS has caught the attention of many researchers, as before, looking for the AS of nonlinear dynamical systems. The approximate periodic motion of a simple pendulum was investigated in El-Barki et al. 19 using the approach of small parameter. 17 The chaotic behavior of a weakly nonlinear 2DOF dynamical system is addressed in Lee et al., 20 which examines its motion according to an internal resonance event. The steady behavior of an elastic nonlinear pendulum is examined in Eissa et al., 21 while an improvement of this work is studied in Gitterman et al. 22 in which the effect of an external force on the spring pendulum is considered. The solvability conditions as well as the ME are determined in the context of the examined resonance cases
One of the significant perturbation methods used in the solutions of nonlinear differential equations is the homotopy perturbation method (HPM). 23 This method is used in He et al. 9 and Amer et al. 24 to gain the solutions of vibrational motion of dynamical models, in which the stability conditions are obtained. These solutions are compared with the numerical ones to show the great accuracy of the used HPM. The motion of a pendulum attached to a controlled spinning wheel by a thin spring is examined in Moatimid et al. 25 To actually achieve a roughly periodic solution, the nonlinear extending frequency has been modified along with a combination of HPM and Laplace transforms. A graphic analysis of the relationship between the extended and natural frequencies is provided. In He et al., 26 the authors focused their interest to the analysis of some examples of non-conservative oscillators. Moreover, the solutions of conservative oscillators have been greatly simplified in accordance with the modification of this method, in which this adjustment is exclusive to HPM and does not appear in any other methods. The efficiency of the HPM for severely nonlinear oscillators is demonstrated in He et al., 27 in which a generalized Duffing oscillator is used to explain in detail the solution’s procedure. On the other hand, He’s multiple scales method 28 is a hybrid of the HPM and MST in the traditional perturbation approach. This approach has been shown to be a potent tool for solving a variety of nonlinear differential equations. Similar vibrating systems are investigated in He et al. 29 and Ma et al. 30 The main properties of forced nonlinear vibrating systems are captivating in He et al. 31
Along Ismail et al. 32 and Amer et al., 33 the large parameter approach and the Runge–Kutta algorithms, respectively, are used to study the analytic and numerical solutions of the planar movement of a heavy solid attached to a string from one end, in which the other end is restricted to move on in a specified trajectory. The motion of a spring in a plane is examined in Ismail et al. 34 when its suspension point follows the trajectory of a circle with a sufficiently large radius. Computer codes have been employed to demonstrate the influence of the various parameters of the system’s motion.
In this study, a nonlinear motion of an oscillating dynamical system with 2DOF is investigated. In the context of the generalized coordinates, the EOM are established employing Lagrange’s equations and solved analytically utilizing the TMS. The acquired solutions enable us to examine the system’s behavior and to realize both solvability requirements and the ME in the framework of the system’s resonance circumstances. The stability and instability of the discovered probable fixed points are examined. The resonance curves, as well as the solutions’ diagrams, are graphed to show how the input variables of the investigated system effect on the system’s dynamical motion. The significance of this work may be seen in its many practical applications, such as the mobility of railway carriages, the transportation of commodities in ports, and the movement of travelers’ baggage at airports.
Problem’s description
In this section, we consider the motion of the 2DOF dynamical model consisting of two connected masses Sketches the dynamical model.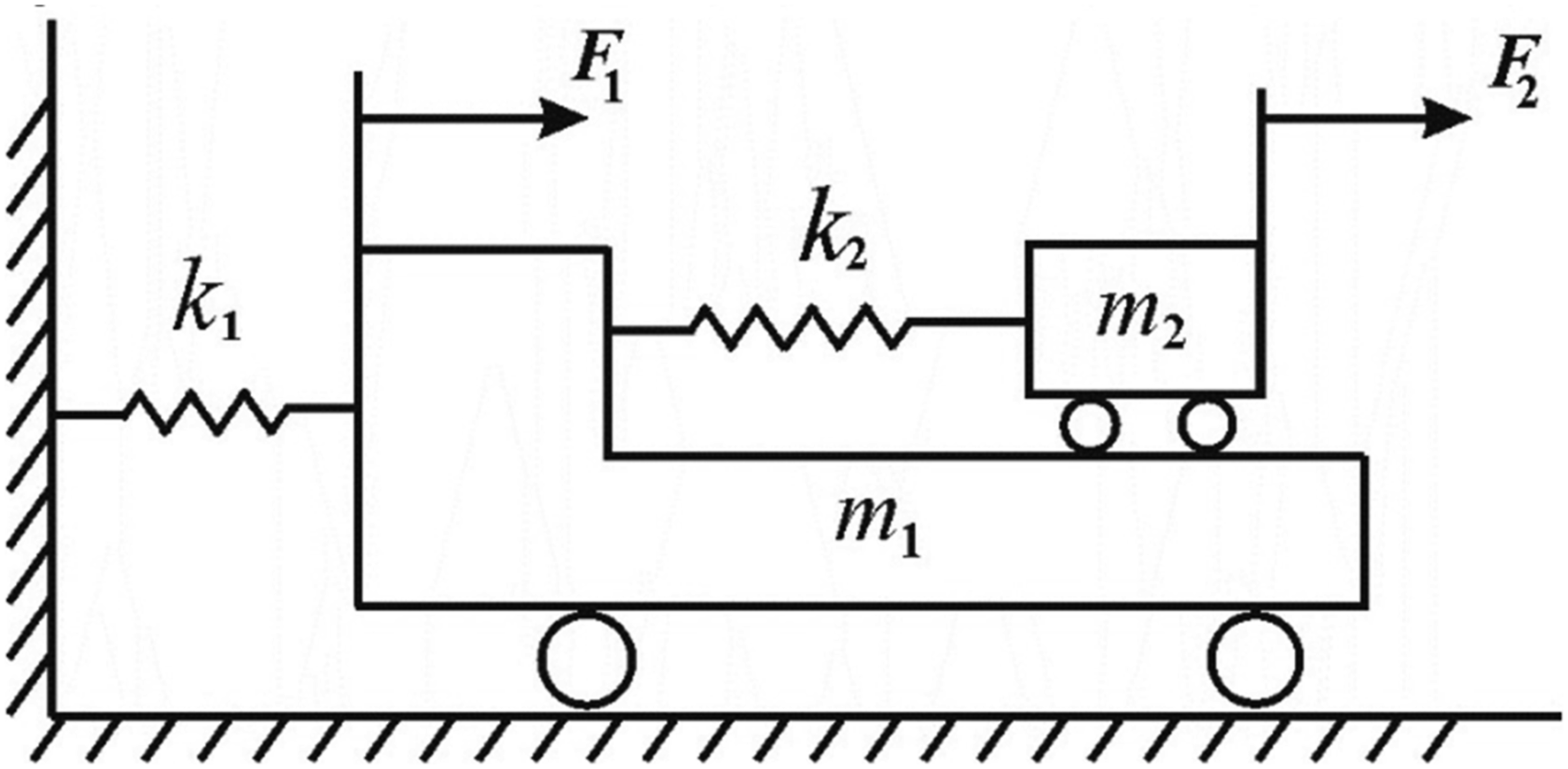

According to (1), the Lagrangian

As a result, Lagrange’s equations of the conservative systems can be expressed as
35

To obtain the system’s EOM in its dimensionless form we insert the dimensionless forms of frequencies, coordinates, parameters, and time as follows



Substituting (1), (4) into (3), we get the EOM in the forms


The system of equations (5) and (6) is a nonlinear one of two second-order differential equations in which they are functions of the dimensionless parameter
Methodology
In this section, we will use the TMS to achieve the approximate solutions of the EOM (5) and (6), and to acquire the resonance conditions.
36
Therefore, a small parameter


Using the TMS procedure, we can seek the expansions of


To determine

Here, terms of
Equating coefficients of equal powers of








Checking the preceding equations (11)–(16), reflects that they can be solved sequentially taking into account the possible generic solutions of equations (11) and (12), which can be written in the forms


To obtain the desired uniform approximate solutions, substituting (17) and (18) into (13) and (14), then omitting terms that lead to secular ones. Therefore, we can formulate the conditions for getting rid of these terms in the forms

These conditions allow us to approach the second-order solutions in the following ways


To obtain the third-order approximations, substituting (17)–(21) into (15) and (16), then removing terms that yield secular terms. The necessary conditions to get rid of these terms have the forms


Then, we can write the solutions


The undefined functions may be obtained from the removal requirements of secular terms (19) and (22), in addition to the next conditions


The substitution from the solutions (17), (18), (20), (21), (23), and (24) into the series (9) and the hypotheses (7), yields the desired approximate solutions
Resonance cases
In this section, the classification of resonance cases can be achieved according to the solutions (20), (21), (23), and (24). One can obtain the resonance when the second and third approximations’ denominators approach zero. As a result of these equations, various resonance cases can be identified as follows 1. Primary external occurs at 2. Internal occurs at
It’s worth mentioning that if any of the resonance cases are met, we can expect the considered model’s behavior to be quite complicated. Furthermore, the approaches employed above in (20), (21), (23), and (24) are valid if the vibrations have values other than the resonance cases.
Now we’ll examine a combination case of primary external and internal resonances that occurs at the same time. As a result, we consider

These parameters are regarded a measure of the distance from the vibration and the rigorous resonance. Then, we express about them in terms of

Substitution (26) and (27) into (13)–(16), and then removing the generated secular terms to gain the solvability requirements for the second and third approximations as follows



In light of a detailed examination of the aforementioned solvability requirements (27) and (28), we can see that these conditions constitute a system of four nonlinear partial differential equations (PDEs) of the functions

Based on the dependence of

Using the above formula (30), the solvability conditions of PDE (28) can be transformed into ordinary ones after utilizing the next modified phases
17


Substituting (29)–(31) into (28), then the real and imaginary portions may be separated to have a system of four first-order ME of both amplitudes



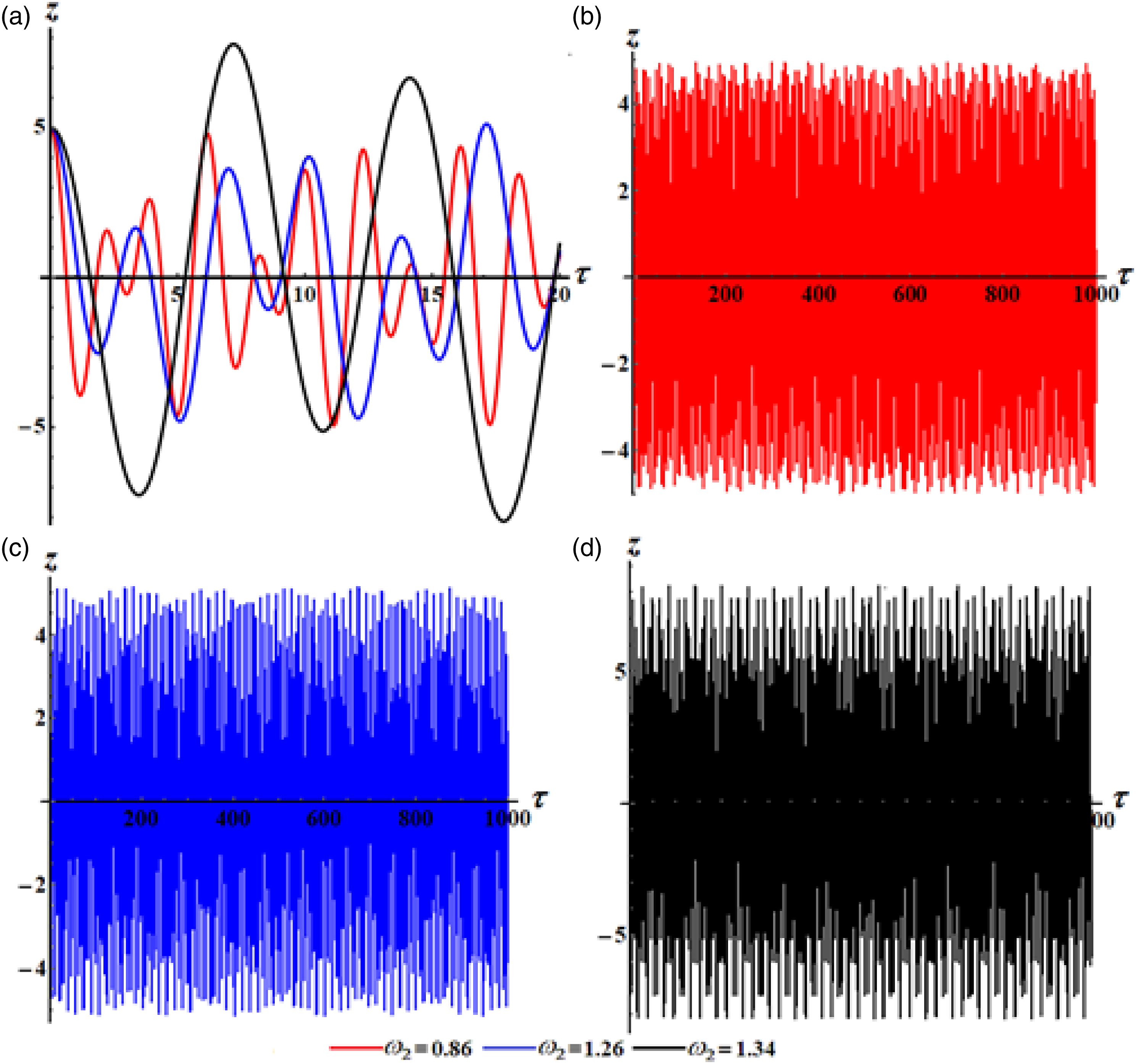
The solutions of this system represent the time histories of Indicates the variation of the amplitude Represents the time histories of the modified phase Represents modulation of the amplitude Examines the influence of different values 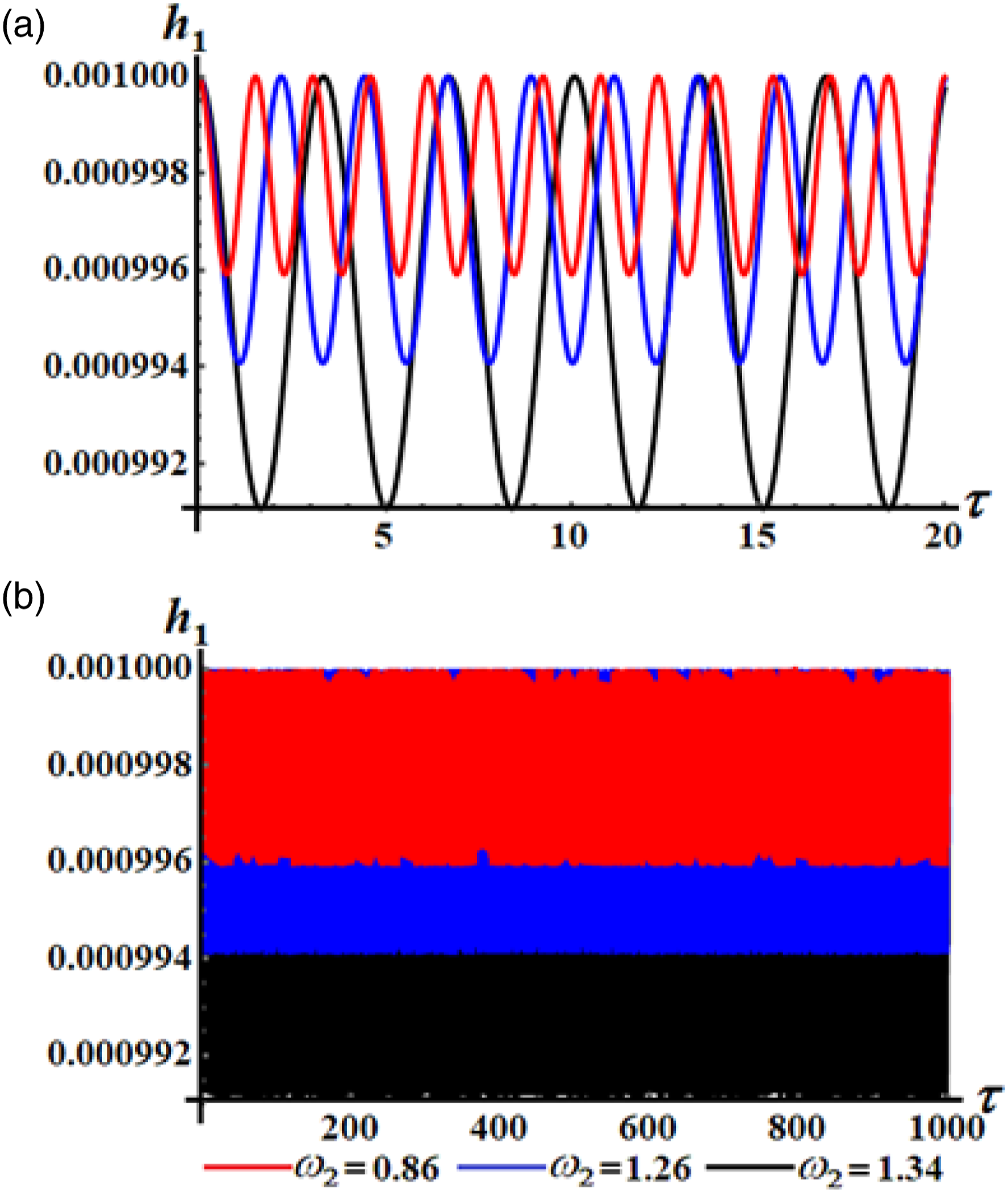
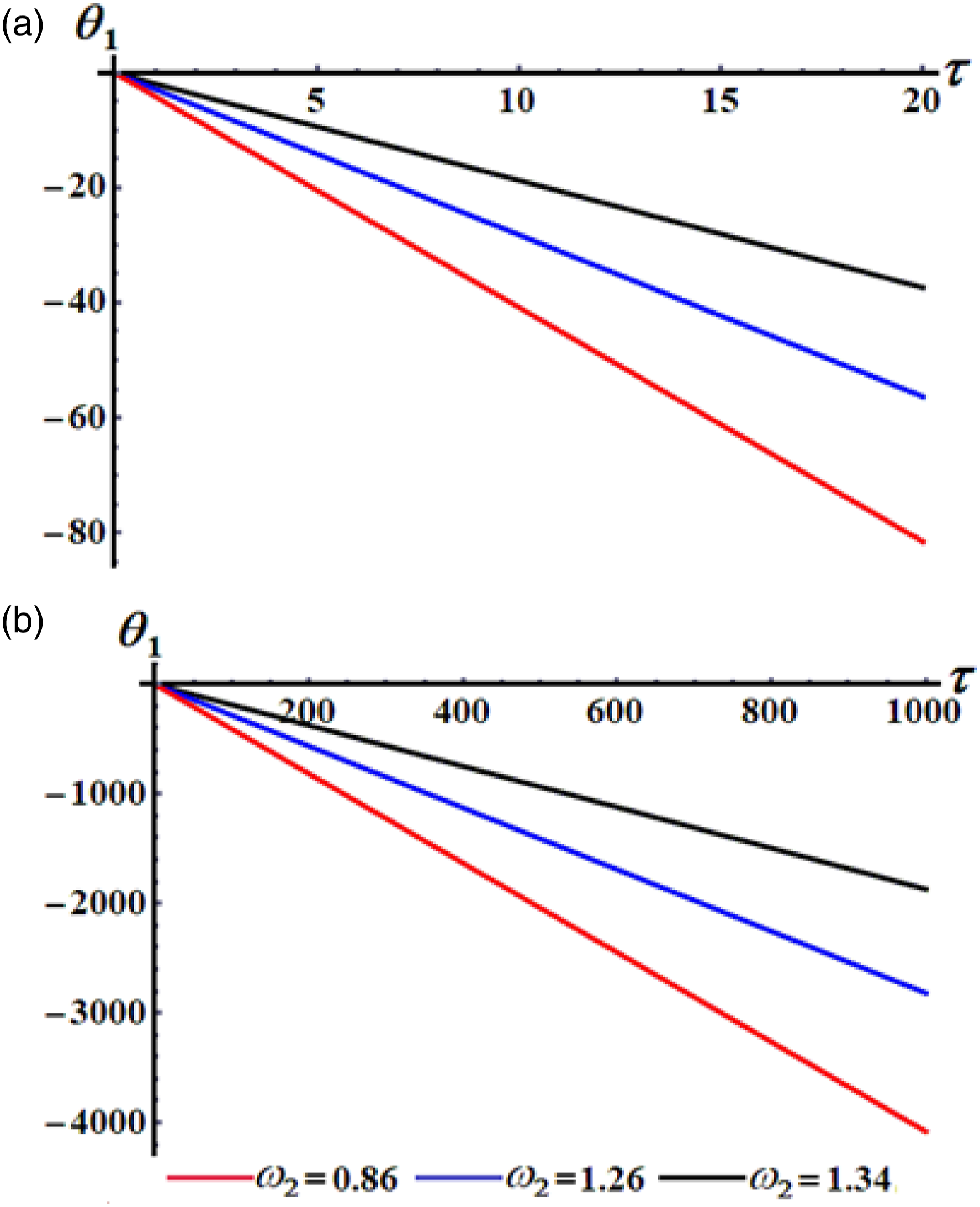
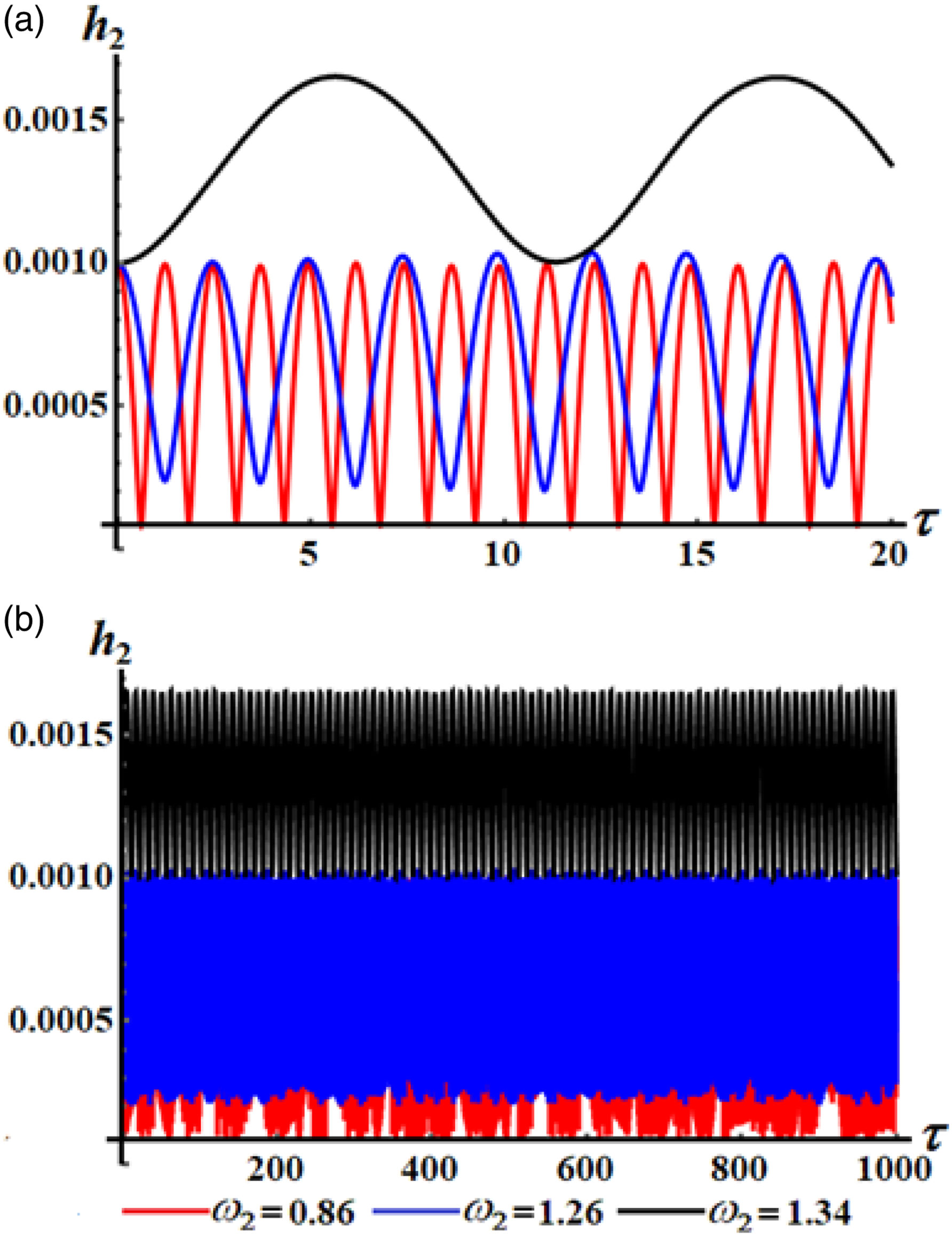
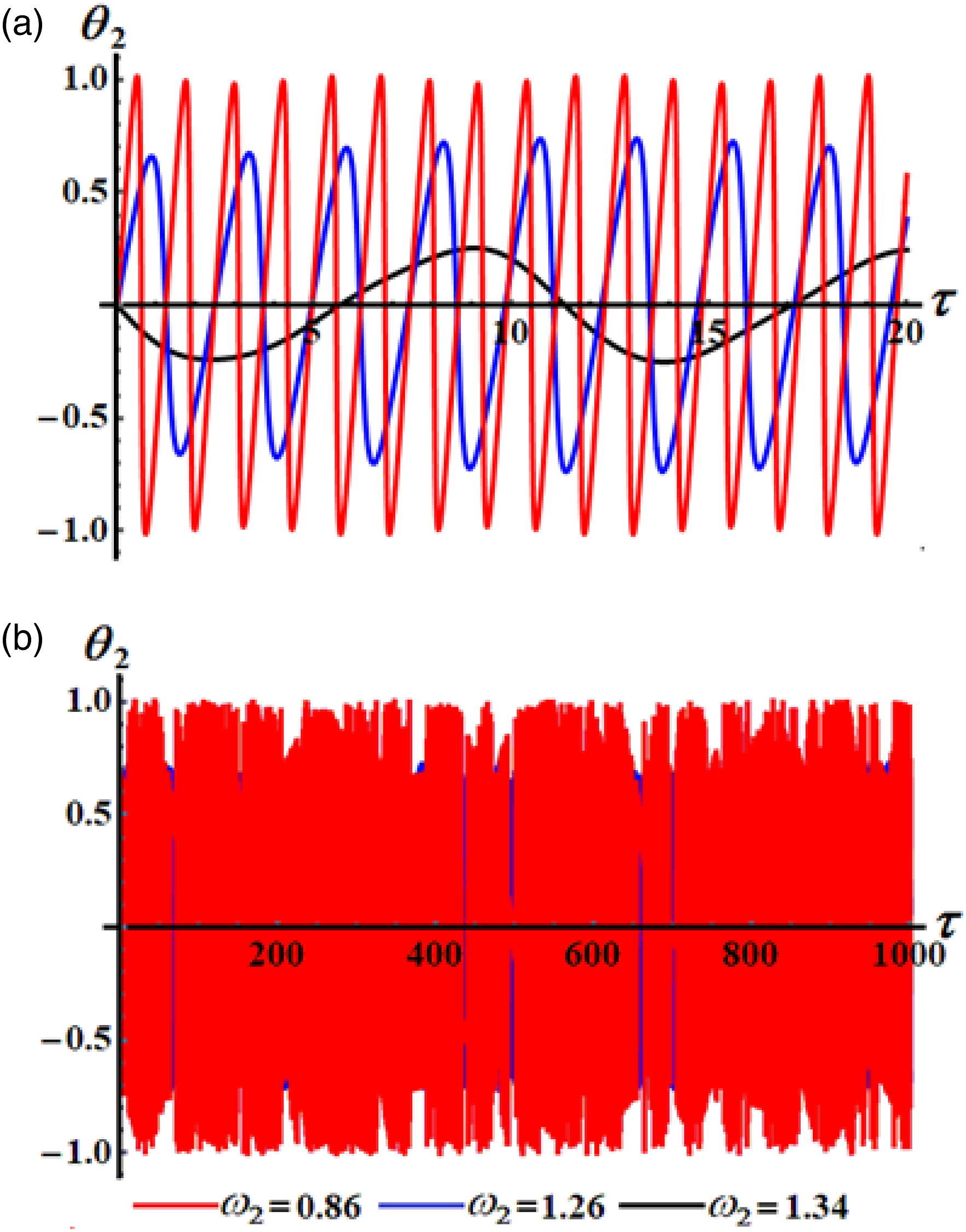
Looking closely at these figures, we can find that they describe the variations of the amplitudes
The inspection of Figures 4 and 5 shows the time histories of
The phase plane diagrams of the amplitudes Shows the diagrams of phase plane Shows the phase plane 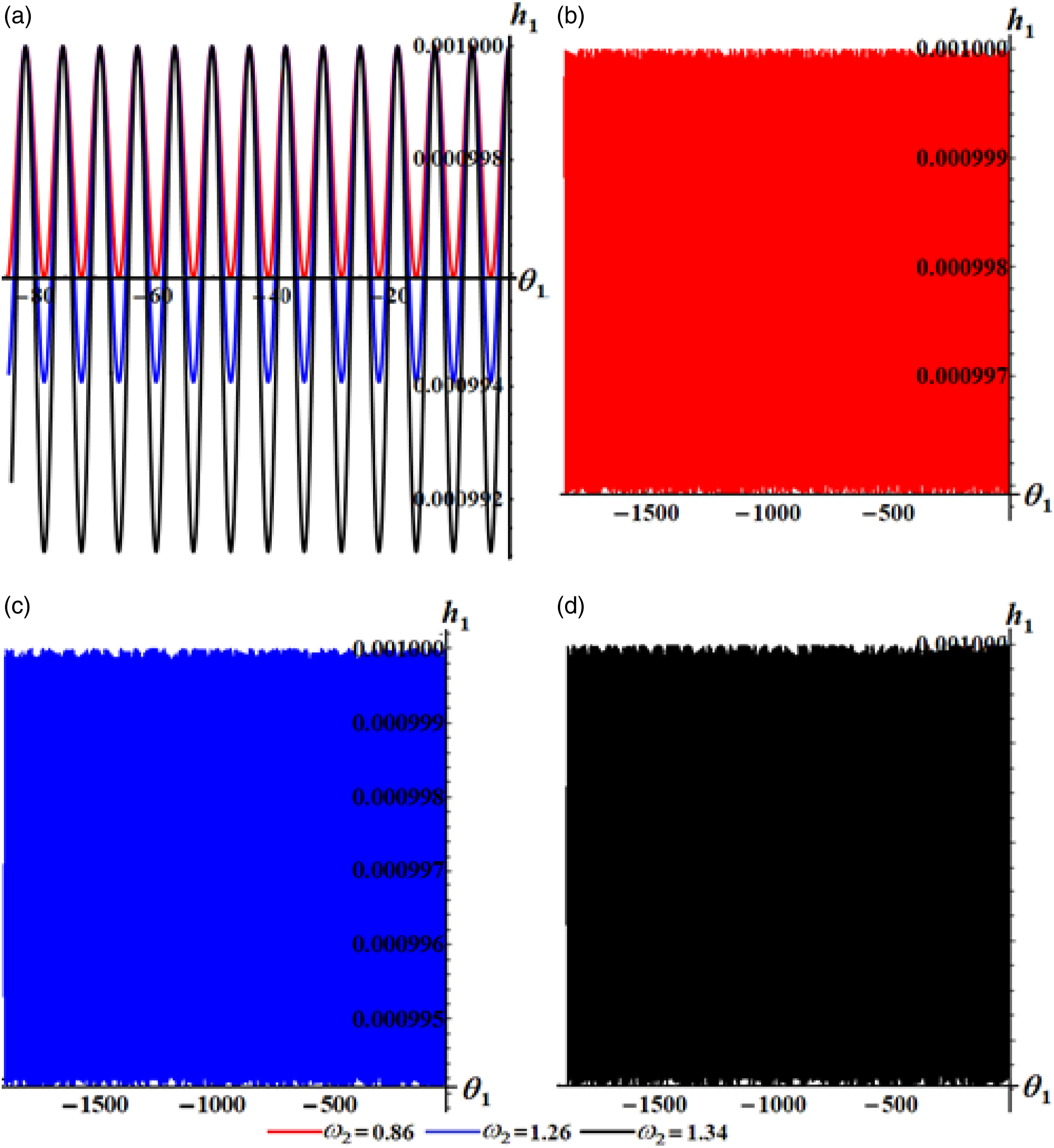
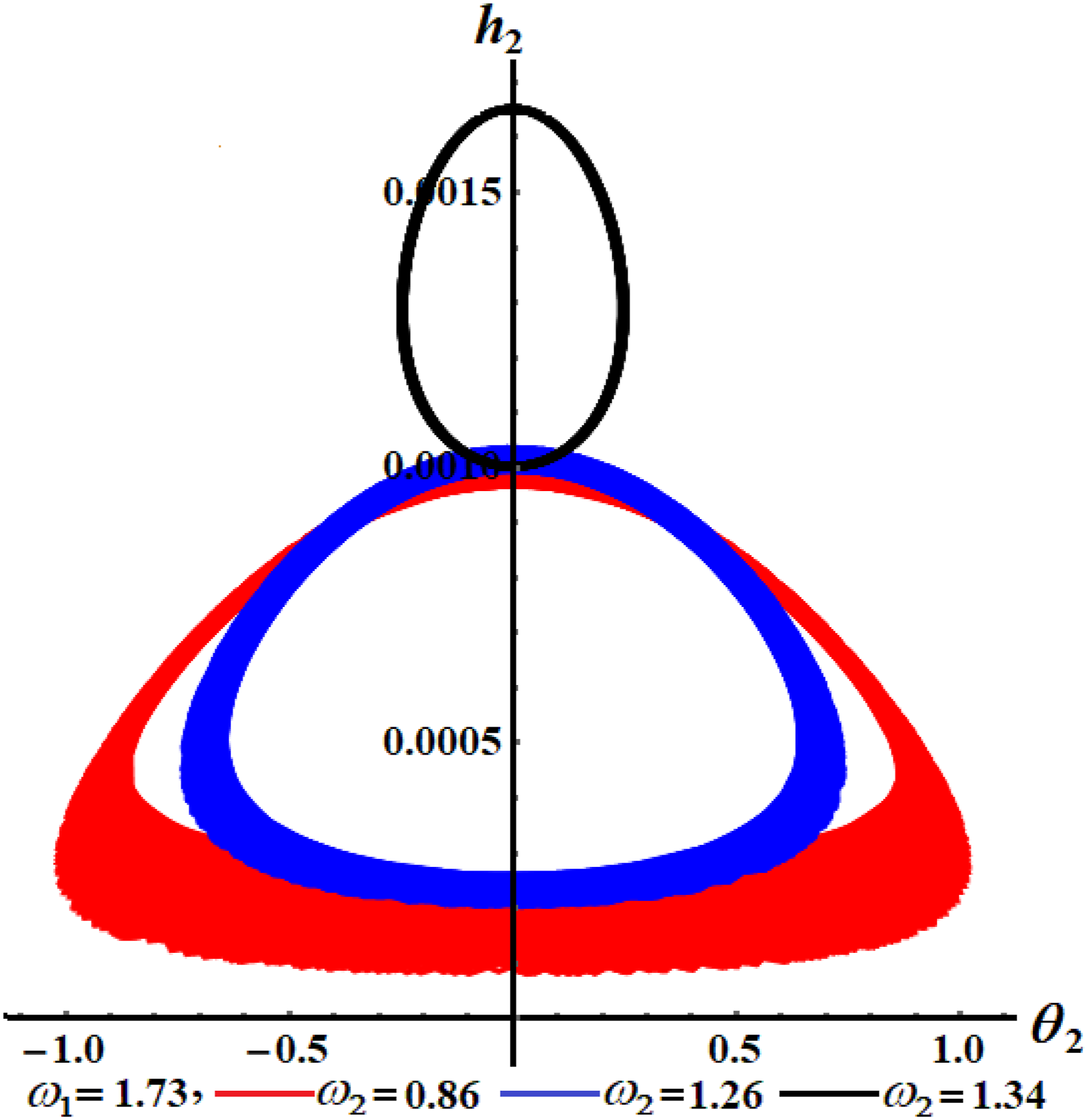
The principal aim of Figures 8 and 9 is to investigate the gained temporal histories of the approximate solutions Describes the effects of variation of mass Describes the influence of variation of 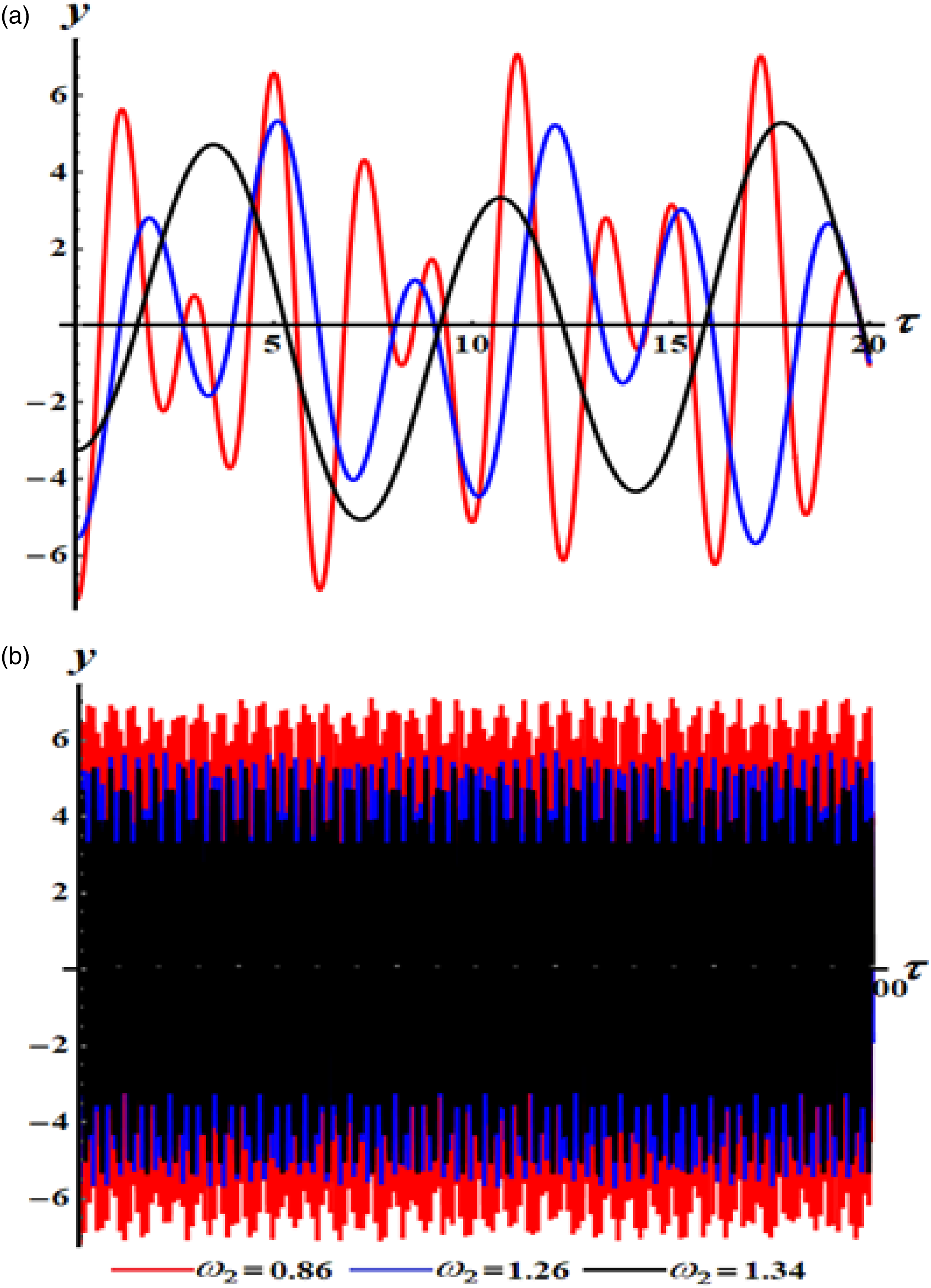
Steady-state solutions
This section’s purpose is to look at the steady-state solutions of the considered model, which correspond to the zero derivative of amplitudes

Substituting (33) into (32) to have the following system



Removing


One of the most important parts of steady-state oscillation is the examination of its stability in a very near zone around the fixed points. We consider the following substitutions




Based on the preceding simulations we can write the unknown perturbed functions






We can now establish the fundamental criteria for the stability of steady-state solutions using the conditions Routh–Hurwitz
40



A closer examination of the curves in Figure 10 reveals the steady-state solutions of Clarifies the fixed points at 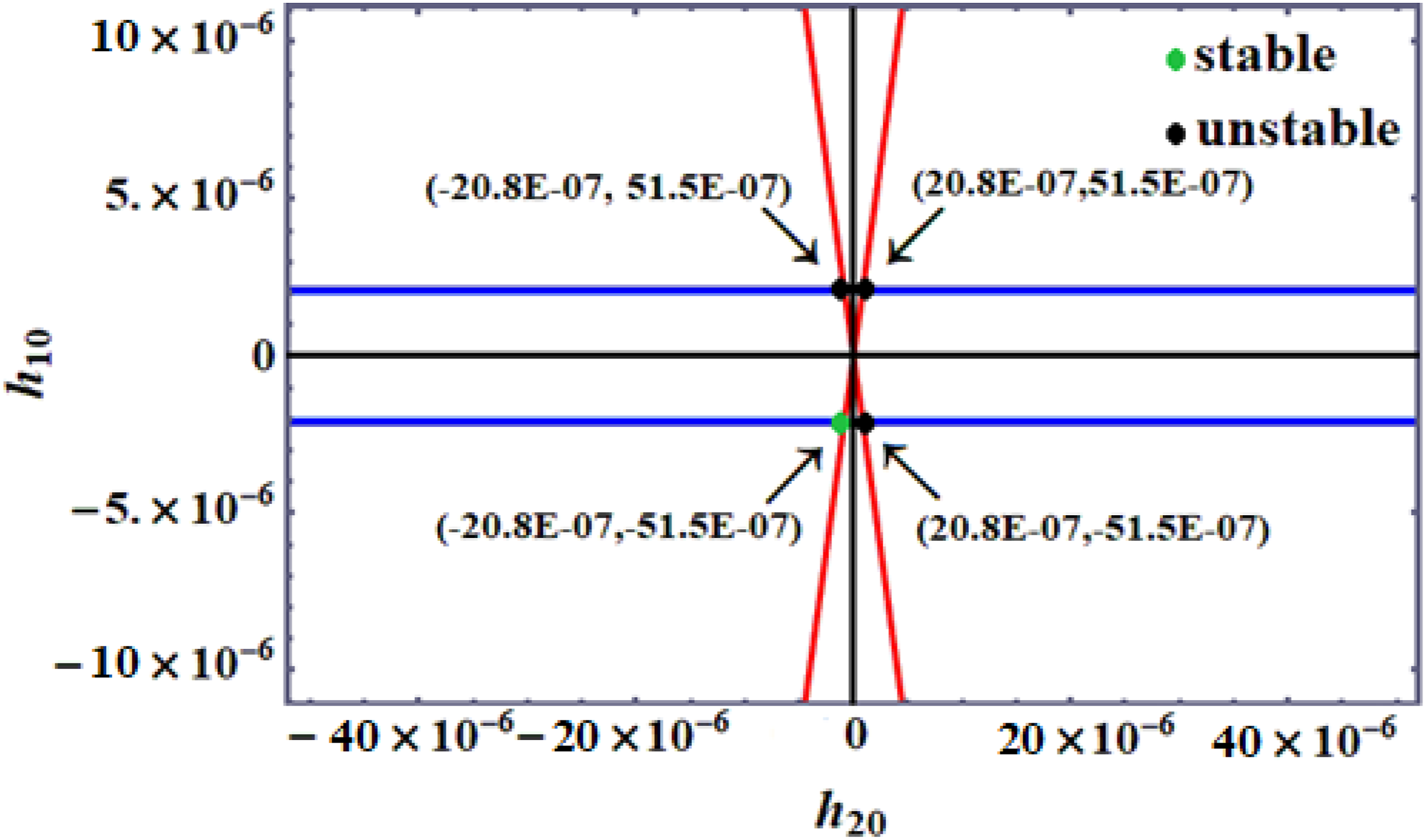
Represents the fixed points at

Conclusion
A dynamical system with a 2DOF and two springs is examined as novel model. The general EOM are derived applying Lagrange’s equations from the second type of and solved analytically using the TMS up to the third-order of approximation. The solvability requirements and the ME have been established in context of the categorized resonance situations. The internal and external resonances are combined simultaneously and studied. The time-dependent of the gained analytic solutions, modified phases and amplitudes are graphed to reveal the influence of the model’s parameters on its behavior. The stability of the fixed points a have been investigated using the criteria of Routh–Hurwitz’s. Although the employed procedure is regarded as conventional, it is applied to a specific model, and then the achieved results are considered to be new. The significance of this study is exemplified by its numerous practical applications, including the movement of railroad wagons, the transportation of products in ports, and the ease with which airports can handle passenger baggage.
Footnotes
Acknowledgments
The researchers would like to thank the Deanship of Scientific Research, Qassim University, for funding the publication of this project.
Author contributions
Sewalem Ghanem: Conceptualization, investigation, validation, visualization, and reviewing. TS Amer: Conceptualization, methodology, data curation, validation, visualization and reviewing, editing. WS Amer: Conceptualization, formal analysis, resources, visualization, and reviewing. Shimaa Elnaggar: Conceptualization, investigation, visualization, writing-original draft preparation. AA Galal: Conceptualization, methodology, resources, visualization, reviewing.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability
The datasets used and/or analyzed during the current study available from the corresponding author on reasonable request.