Event-triggered adaptive neural finite-time tracking control for non-strict feedback stochastic nonlinear systems with unknown time-varying control directions and input nonlinearities
Open accessResearch articleFirst published online March, 2023
Event-triggered adaptive neural finite-time tracking control for non-strict feedback stochastic nonlinear systems with unknown time-varying control directions and input nonlinearities
This paper focuses on dynamic-surface-based event-triggered adaptive neural finite-time tracking control for a category of non-strict feedback stochastic nonlinear system subject to unknown time-varying control directions, and input nonlinearities. Firstly, an improved event-triggered mechanism is presented, which simultaneously considers tracking error variables and compensating for event errors in threshold value. Secondly, a novel Lemma is provided to address concurrently the issues of Nussbaum terms in stability analysis and stochastic system finite-time stability. Thirdly, neural networks are utilized to cope with unknown functions. In addition, the Nussbaum functions are applied to identify time-varying unknown control directions and input nonlinearities. Moreover, the errors of the dynamic surface technique are compensated successfully by error compensation signals. By combining the proposed Lemma 1 and event-triggered adaptive neural finite-time control scheme, finite-time stability of considered systems in probability can be guaranteed, the tracking error can drive to a small neighborhood of the origin in finite time, and the Zeno behavior can be excluded. Finally, the effectiveness of the designed control scheme has been demonstrated through a second-order numerical system and a mass-spring-damper example.
Control of stochastic nonlinear systems have attracted much attention in recent years.1–6 Because many actual systems, such as robotic manipulators,7 induction motors,8 and so on, contain stochastic disturbances. Additionally, in actual implementations, the designed control strategy is expected to be finished in a finite time, such as the finite-time control method considered by 9–11 for deterministic nonlinear systems. Thus, system stability is accomplished in a finite time with the assistance of a finite-time control approach. For stochastic nonlinear systems, the concept of finite-time stabilization was introduced in.12 Subsequently, the preceding approach was further expanded to various stochastic systems. In,13 Li et al. investigated the stochastic nonlinear systems in the strict-feedback form withfull-state constraints and input saturation, and a new stability definition and the Lyapunov stability theorem were presented. In,14 for a class of uncertain strict-feedback nonlinear systems with hysteresis, Zhang et al. developed the adaptive fuzzy finite-time control based on command filter. According to the Lyapunov stability theorem, a semi-globally finite-time stability theorem in probability was also proposed, in which the convergent time is shorter than the.15 In,16 Fang et al. explored the finite-time stabilization of high-order stochastic nonlinear systems in the strict-feedback form subjected to an output restriction. The pure feedback stochastic nonlinear systems with full state constraint has been studied in.17
Furthermore, comparing pure-feedback, and strict feedback structures, the non-strict feedback is a more general form of feedback. In non-strict feedback stochastic nonlinear systems, all state variables are included in fi(X) functions with X = [x1, x2, …, xn]. To this purpose, a series of studies on non-strict feedback systems has been done in.18–21 The Chen et al.19 overcame this obstacle by utilizing variable separation method and adaptive backstepping strategies. In,18 Wang et al. deployed neural networks to handle non-strict functions based on their strong approximation capacity, which simplifies processing for non-strict feedback systems. In,20 Liu et al. considered the finite stability of the nonlinear systems in the non-strict feedback form with state constraints, where the unknown function is approximated by a fuzzy logic system. Moreover, in,21 Wang et al. investigated the finite stability for non-strict feedback stochastic systems subject to input delay and output constraints. It further extends the range of applications for finite-time control. Although superb results were been achieved above-mentioned works, there is a hypothesis that control gains require know.
Among the mentioned above works, it is assumed that the sign and magnitude of the control gain are known a constant, which have been difficultly acquired in actual applications due to some sudden interferences and fast changes on system states, such as the autopilot design of time-varying ships22 and multi-agent systems.23 Hence, research is valuable and meaningful for unknown control directions of the system. A class of Nussbaum functions was presented to identify the unknown coefficient in the equation in.24 Subsequently, combined with Nussbaum technology, an adaptive control scheme had been studied for strict-feedback nonlinear with unknown control directions in.25 Admittedly, uncertain time-varying control directions are more common compared with the constant case in many practical control applications. In,26 Ding investigated a new Nussbaum function to deal with unknown high-frequency gain. According to the new Nussbaum function, Chen et al.27 had focused on multi-input and multi-output (MIMO) systems with unknown time-varying control directions, and an adaptive fuzzy asymptotic control was achieved. Recently, Shahriari-Kahkeshi et al. had considered uncertain time-varying control directions for multi-agent systems with dead-zone nonlinearity in.28
Furthermore, there were some other works to research unknown control directions for stochastic nonlinear systems as follows. The stability of stochastic nonlinear large-scale systems in the strict-feedback form with unknown control directions was studied in,29 and a Theorem was proposed to directly analyze the stability of the system. Also, a Theorem was presented in,30 although the Nussbaum function under consideration is not the same as in.29 Further, an adaptive neural output feedback control was probed for non-strict feedback stochastic nonlinear systems with unknown backlash-like hysteresis and unknown control directions. In,31 Xia et al. developed an observer-based event-triggered adaptive fuzzy control scheme for unmeasured stochastic nonlinear systems in the non-strict feedback structure with unknown control directions. Additionally, other studies of stochastic nonlinear systems with uncertain control directions may be encountered in.32–35 It’s worth noting that the unknown time-varying control directions for stochastic systems with finite-time stability have yet to be fully solved. This is one of the driving forces behind the work in this paper.
In recent years, event-triggered control schemes have garnered considerable attention as a way to preserve communication resources and lessen the strain of communication. Qiu et al. proposed a fixed-threshold approach for communication constraint in,36 Note that the event-triggered controller only samples in practice when the trigger objectives are satisfied. In reality, the maximum trigger interval is difficult to predict ahead of time, which could lead to data redundancy problems. Therefore, in,37 Kong et al. designed a relative threshold strategy that varies dynamically with the input signal to improve the controller’s performance. Moreover, in,38 Wu et al. considered the tracking error variables in the threshold value based on the relative threshold strategy to improve the system’s tracking performance. In,39 Li et al. proposed a new event-triggering mechanism that reduced conservatism in control design and stability analysis while simultaneously considering the system’s finite-time stability. Recently, an event-triggered adaptive Fixed-Time tracking controller was designed for a family of nonlinear systems with a non-strict feedback form in Wang et al.40. In addition, event-triggered adaptive fuzzy control had been considered for stochastic strict-feedback nonlinear systems with unknown backlash-like hysteresis and unmeasured states in Zhu et al.41. In,42 Liu and Zhu further extended the event-triggered control strategy to stochastic strict-feedback nonlinear systems and had explored event-triggered adaptive neural control of stochastic nonlinear systems with time-varying delays and state restrictions. However, much of the works discussed above ignore the input nonlinearities and the uncertain control directions for stochastic non-strict feedback systems, as well as the fact that the system is stabilized in infinite time.
On the other hand, input nonlinearities can be encountered in many practical applications, and such as saturation,13 dead-zone, backlash, and hysteresis 14. If these input nonlinearities are neglected, which can cause system instability and degrade system performance. Recently, input nonlinearities had been investigated in.43–45 In,44 Malek et al. had researched prescribed performance-based adaptive control for switched MIMO uncertain nonlinear systems in the strict-feedback form subject to unmodeled dynamics and input nonlinearities. In,43 Zouari et al. was developed a neural network controller for fractional-order systems with input nonlinearities and asymmetric time-varying Pseudo-state constraints. Furthermore, in,45 Kamalamiri et al. had considered input nonlinearities for non-strict feedback systems with output constraint, unknown control direction, and an adaptive finite-time neural control scheme was proposed. Nonetheless, in the above works, the system’s stochastic disturbances are underexplored and the system’s input is driven by time strategy leading to unnecessary waste on communication resources in the aforementioned studies. In reality, the “explosion of complexity” can occur during the traditional design controller process as a result of repetitive differential virtual control, such as.46,47 Moreover, note that the dynamic surface control (DSC) was used to overcome this issue in 48 and 49. It is universally recognized that dynamic surface technique can lead to greater errors. To end this, Farrell et al. proposed a compensation signal in49 to remove dynamic surface technique errors, similar work is also mentioned in.14
The finite-time stability problems of the non-strict feedback stochastic systems were handled in Wang et al.21, but triggered project was neglected for controller to lead the wastes from the aspect of saving communication resources. Although Li et al.39 considered event-based design of finite-time control for the nonlinear systems, it cannot be directly utilized in this paper due to omitting unknown time-varying control directions, input nonlinearities, and stochastic disturbances on systems. Therefore, how to design event-based finite-time control for the non-strict feedback nonlinear stochastic systems with unknown time-varying control directions and input nonlinearities is still an important and open-end topic.
Motivated by the above-mentioned discussions, a class of event-based finite-time control strategies are investigated for nonlinear stochastic systems subject to unknown time-varying control directions and input nonlinearities in the non-strict feedback form. Nussbaum functions are applied to identify time-varying unknown control direction and input nonlinearities. Based on the backstepping technique, combining the dynamic surface control (DSC) technique and the MLP algorithm, appropriate controllers only containing one adjusted parameter are designed in this paper. The primary contributions of this paper are summarized in three aspects as follows
(1) An improved event-triggered mechanism is presented that considers both tracking error variables and compensating for event errors at the same time in threshold value. Hence, the control performance of the algorithm is enhanced and the conservatism is minimized in control design and stability analysis. Moreover, the proposed event-triggered mechanism not violates Zeno behavior.
(2) Based on the Lyapunov stability theorem, a new criterion of semi-globally finite-time stability in probability (SGFSP) is proposed in Lemma 1. Due to the existence of Nussbaum terms in the stability analysis, the currently available finite-time stability criterion cannot be used to directly analyze the stability of stochastic nonlinear systems with time-varying unknown control directions, such as.50 By Lemma1, an event-triggered adaptive neural finite-time tracking control strategy is successfully constructed for stochastic nonlinear systems in the non-strict feedback form with unknown time-varying control directions, and input nonlinearities.
(3) Both the dynamic surface technique and hyperbolic tangent functions have been incorporated into controller design to address ”complexity explosion” and ”singularity”. Meanwhile, an error compensation mechanism is built to eliminate the dynamic surface technique’s errors. Additionally, to alleviate computing load, just one adaptive law should be updated online.
Problem formulation and preliminaries
Stochastic finite-time stability theorem
Consider the normal stochastic nonlinear system
where x ∈ Rn is the system state; ω denotes an r-dimensional standard Wiener process defined on a complete probability space where Ω is a sample space, is a σ-field and p is the probability measure; f(x): Rn → R and g(x): Rn → Rn×r are Borel measurable continuous functions.
Definition 1: 30 For a function V(x) ∈ Rn, denote LV as the differential operator of V respect to time, then, LV is defined for system equation (1) as following
where is positive semi-definite calling the Herssian term.
Definition 2: 13 For the system (1), there exists an unique solution x0 ∈ Rn, and the setting time is finite almost surely. For , such that , Then, the solution of the system (1) is semi-globally finite-time stability in probability (SGFSP).
Definition 3: 25 Any even differentiable function N(ξ): R → R is called a Nussbaum-type function if it has the following properties
Generally, Nussbaum-type function is constructed by FG which F is a nonnegative increasing function and is Trigonometric function, such as, , 51, and 52. In this paper, the function be utilized to design the controllers.
Lemma 1: Let ξ(t) is a smooth function defined on (0, T) and N(ξ) is a category of Nussbaum-type function. Consider the stochastic nonlinear system (1). If there exist a Lyapunov function and , such that
where and 0 < C < ∞ . C1 is positive constants. Then, the system (1) is SGFSP with the settling time T as following
where 0 < γ < 1, and
Proof: From the inequality equation (4), we can deduce that for x0 ∈ Rn, V(x) ≥ 0 and with . Based on the Theorem 4.1 in,53 the system equation (1) has an unique solution.
According to the definition 2, we need to prove that there exists a finite settling time T, such that , and .
From 0 < γ < 1, the following inequality can be obtained
define , letting the complementary set of Ω as with . Next, two cases be considered as x ∈ Ω and .
Case1: . According to equation (6), one can get that
define τm = inf{t > 0, ∥ x(t) ∥≥ m} as the stopping time for ∀m > 0. It is obvious that when m → ∞, τm → ∞. Next, letting W(x) = V1−β(x), t ∈ [0, T ∧ τm]. It is noting that V1−β(x) is a positive definite function with . By It ’s formula, one has
Moreover, according to the stochastic differential in Definition 1 and the Theorem 1 in,13 one can deduce that
where is positive semi-definite. Hence, one can get by equation (9) that
Then, substituting equation (7) into (10) yields that
Bringing the above inequality into the second term on the right-hand side of the equation (8) inequality and using the definition yield
where . Substituting the above inequality into equation (8) gets
where . is a category of Nussbaum functions with the normal form satisfying . Moreover, is a nonnegative increasing function and is Trigonometric function. The can be expressed difficultly as the explicit functions. Therefore, ξ boundedness is proved by the property of Trigonometric function which is necessarily positive or negative on certain intervals. Without loss of generality, let is positive on intervals of the and negative on intervals . Hence, according the above discussion we can further deduce that and . Next, the boundedness be analyzed for h > 0 and h < 0.
Case 1.1: If h > 0, supposing that ξ(s) has no bound on s ∈ [0, T ∧ τm). Namely, there must exist ξ(s) → ∞, such as . Then, combining equation (13), one can get that
From equation (14), it can be derived that . However, there is a contradiction because is positive semi-definite. Hence, ξ(s) has bound on s ∈ [0, T ∧ τm). Then, must be bounded on [0, T ∧ τm) with .
Case 1.2: If h < 0, Similar to the proving process of Case 1.1 to acquire . Admittedly, respect to functions of zi, vi, θ, then, zi, vi, θ are limited by the parameters C, C1, γ. Therefore, tends to a small value when chooses appropriate parameters C, C1, γ. From equation (14), one gets
where M ≫ max{M1, M2}. It is obvious that letting m → ∞, then τm → ∞, combining equation (15), one can get that the finite settling time T is
Then, we can deduce that there exists the finite settling time T. The trajectory of x(t) can reach the set Ω, i.e.,x(t) ∈ Ω for ∀t ≥ T with T satisfied .
Case 2: x ∈ Ω. Similar to the proving process of Case1 can obtain and the trajectory of x(t) does not exceed the set Ω.
To conclude, combining the above proof can gain that the trajectory of x(t) enters set when ∀t ≥ T. Since, the nonlinear system (1) is SGFSP.
Remark 1. Note that Lemma 1 provides an extremely effective tool to analyse the stabilization of the stochastic systems with uncertain time-varying control coefficients in a finite time. Additionally, Lemma 1 consinders a class of Nussbaum functions, broadening its applicability. While considers a similar lemma, the system’s finite-time stability was been ignored. Moreover, Lemma 1 can be also utilized to analyze the finite-time stability of deterministic systems.
Problem formulation
Consider a class of stochastic nonstrict-feedback nonlinear systems with the time-varying unknown control directions and input nonlinearities as follows
where is the state vector of the system. u(v(t)), v(t) and y ∈ R are system output of actuator nonlinearities, system controller input and system output signal, respectively. ω is an r-dimensional standard Brownian motion defined on a complete probability space with Ω being a sample space, being a σ-field and P being a probability measure. hi(t), fi(·) and gi(·) are time-varying unknown smooth nonlinear functions.
The control objective is to design an event-triggered adaptive finite-time controller for the system (17) such that
(1) all the signals in the closed loop system are SGFSP,
(2) the output y(t) follows the desired trajectory yd as expected in the mean square sense,
(3) the Zeno behavior can be completely avoided for new event-triggered threshold.
Input nonlinearities
The output of actuator nonlinearities is describe as follows
where and are positive unknown constants. As mentioned before, four conditions can be formulated by equation (18) such as saturation,13 dead-zone, backlash, and hysteresis.14
To end this section, some useful assumptions and lemmas are given for the design of controllers.
Assumption 1.54 The desired trajectories yd and its first time derivatives yd is known and bounded.
Assumption 2. The function in equation (17) meets the following restrictions
where is the upper bound of hi(t).
Lemma 2.10 The trajectory of system is practical almost fast finite-time stable if there are some design constants ν1, ν2, 0 < ϕ < 1, and 0 < ν < ∞, which makes
Lemma 4.56 For any positive real numbers c, d and any real-valued function ψ(x, y) > 0
Lemma 5.57 (Young’s inequality) For ∀(x, y) ∈ R2, the following inequality holds
where p > 0, m > 1, n > 1 and (m − 1)(n − 1) = 1.
Lemma 6.58 For any stochastic process x(t), if there exists a integer p and a positive constant Θ such that E|x|p ≤ Θ, ∀t ≤ 0, then x(t) is said to be bounded in probability.
Lemma 7.59 For x ∈ R and o > 0, the tanh(·) function satisfies
Event-triggered control mechanism
To reduce the burden and waste of resources on communication, an event-triggered mechanism of the relative threshold is designed as follows
Where e(t) = ϖ(t) − v(t) is triggering error. ϖ(t) denotes the actual controller and αn is the virtual controller that will be designed later. with zi represented tracking errors and z0 is designed parameter. In addition, 0 < μ0 < 1, ι > μ > 0, μ1 > 0, ϶ > 0 are designed parameters. When t ∈ [tk, tk+1), the v(t) maintains a unchanged input ϖ(tk). Moreover, tk+1 is update time points for v(t), which system input v(t) changed as ϖ(tk+1).
Remark 2. The event-triggered mechanism in this paper is inspired by pioneer works Wu et al. 38 and Li et al. 39. Different from previous works of the relative threshold method in,60 an improved event-triggered mechanism is presented here based on the relative threshold strategy by incorporating tracking error function Z0 with Hyperbolic Cosecant function csch(·) in threshold value. It’s worth mentioning that when the tracking error zi grow larger, the trigger mechanism’s threshold shrinks, resulting in desired tracking performance and a shorter trigger period. Conversely, a longer trigger period is obtained when the error is smaller to save more communication resources. Moreover, in,60 Xing et al. considered an event-triggered mechanism to produce some conservatism in control design and stability analysis due to predetermined robust term with . To this end, the Hyperbolic Cosecant function csch(·) in this article is invoked to circumvent this problem. In addition, Zeno behavior of the proposed triggered mechanism can be excluded owing to the existence csch(϶). The detailed process of proof can be seen. As a result, the improved event-triggered mechanism can enhance desired tracking performance and reduce the conservatism for the proposed adaptive event-triggered control scheme to select appropriate parameters μ0, ι, μ, μ1 and ϶.
From equation (26), it can be deduced that . Moreover, it can be obtained with χ2(t) = ±χ1(t) and |χ1(t)| ≤ 1 (The proving process as eqaution (50)–(52) in 41). Hence, we have
Radial basis function neural network (RBF NN)
It is well known that RBFNN is widely used as a tool for modeling nonlinear functions since its good capability in function approximation in.61 In structure, the RBFNN takes the form , where Z ∈ ΩZ ∈ Rq, q is the NN input dimension, and is the weight vector. The NN node number l > 1 and with Si being chosen as the commonly used Gaussian functions, which is in the following form
where μi = [μ1, …, μiq] is the center of the receptive field and κi the width of the Gaussian function. It has been proved that the RBFNN can approximate any continuous function over a compact set ΩZ ∈ Rq arbitrary accuracy as
where is the approximation error. The ideal weight vector W is an artificial quantity required for analytical purpose. W is defined as the value of which minimizes |ɛ| for all Z ∈ ΩZ in a compact region, i.e.
With the backstepping design technique, the event-triggered adaptive finite-time NN control scheme is designed. First of all, define the tracking error variables as
where x1,c = yd, and yd is the reference signal. xi c is the output of the following first-order filter with the intermediate controller signal as input signal αi and αi will be specified later. The dynamic surface is defined as following
where ιi > 0 is a design parameter, i = 2, …, n.
It is noticed that the errors of the filtering αi−1 − xi c can influence the control performance and thus, we introduce compensation signal qi to eliminate the impact of the filtering αi−1 − xi c with qi defined as follows
where li are design parameters, i = 1, …, n.
Next, the compensated tracking error signals are defined as follows
In this paper, the virtual controller αi and adaptive law are constructed as follows
where are positive design parameters and is an integer. The parameter is the estimate of the unknown constant θ which is defined as
where Wi are unknown weight parameter vector and will be specified later. The parameter estimation error is .
The detailed process of designing controllers is shown in the following
Step 1: According to v1 = z1 − q1, z1 = x1 − x1,c, one gets
then, according to z2 = x2 − x2,c yields that
Choose the Lyapunov function candidate as
Then, combining the equation (2), the time derivative of is
The compensating signal is defined as follow
where κ1,1 is designed parameter. Then, substituting equation (43) into (42) yield that
By utilizing Lemma 5, one has
where a1 is designed parameter. Then, substituting equation (45)–(46) into (44) yield that
where . , which is continuous. Thus, the nonlinear continuous function can be approximated by RBFNN such that
By utilizing Lemma 5, one has
where is constant value. Then, substituting equation (48) and (49) into (47) yield that
Step 2 ≤ i ≤ n − 1: Choose the Lyapunov function candidate as
Then, by following the similar analysis as equation (39) and (40), one has
The compensating signal is defined as follow
where κ1,i is designed parameter. Then, substituting equation (57) into (56) yield that
where . , which is continuous. Thus, the nonlinear continuous function can be approximated by RBFNN such that
By utilizing Lemma 5, one has
where is constant value. Then, substituting equation (59) and (60) into (58) yield that
Then, design the virtual controller αi as
substituting (62) into (61) yield that
where . will be removed in the next step.
Step n: According to vn = zn − qn, one has
Choose the Lyapunov function candidate as
Then, we can obtain the time derivative of
By utilizing Lemma 5, one has
where an is designed parameter. Then, substituting equation (67) and (68) into (66) yield that
where , which is continuous. Thus, the nonlinear continuous function can be approximated by RBFNN such that
By utilizing Lemma 5, one has
where is constant value. Then, substituting equation (70) and (71) into (69) yield that
From equation (27), the actual control signal ϖ(t) as
where . ι > μ > 0 and o are design parameters. αn is the intermediate controller signal in equation (35). Then, by combining equation (73) and (27), it can be obtain
According to Lemma 5 and Lemma 7, it follows that
Bringing the above inequalities into equation (74) yields
then, substituting equation (77) into (72) yield that
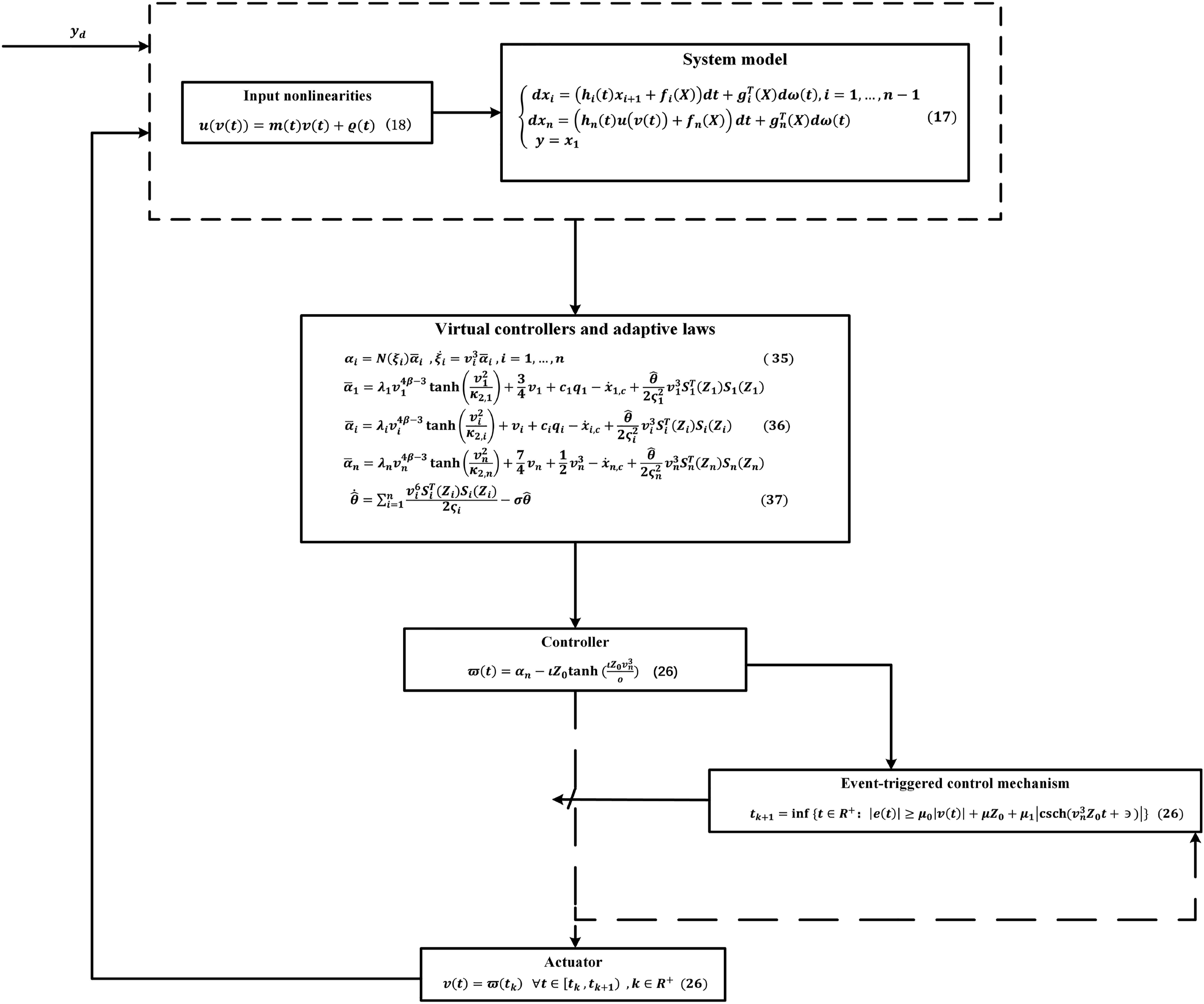
In the end, the block diagram of the event-triggered adaptive finite-time control strategy is shown in Figure 1.
Block diagram of the event-triggered adaptive finite-time control strategy.
Stability analysis
Theorem 1. Consider the non-strict feedback stochastic systems equation (17) subject to unknown time-varying control directions and input nonlinearities under Assumptions 1 and 2. Then, based on the event-triggered mechanism equation (26), the error compensation mechanism equation (33), the controller and the adaptive law equation (35) – (37), it can guarantee that the SGFSP of overall the signals in the stochastic systems, the tracking error converges to arbitrarily small residual set of the origin within in a finite time, and the Zeno behavior can be excluded.
Proof: Now, choose the Lyapunov function as
where ςi is a design parameter. From equation (54), (63) and (80), according to the , then, the time derivative of V can obtained
where Ψi = max{hi, m*} with , , .
Then, combining the definition of θ, the following inequality holds
Then, substituting equation (83) into (82) yield that
According to Lemma 4, by choosing and d = 1 − β, the following inequality holds
therefore, based on Lemma1, the stochastic systems are SGFSP. Where
Moreover, for any 0 < γ < 1, according to the Lemma 1, we can further deduce that V will converge to the set in finite-time T.
Let , it’s evident that
and
where ς is the upper bound of ςi. That is, the closed-loop signals vi and are bounded in sense of mean square value.
According to the definition of vi = zi − qi, the tracking error zi can converge to a small residual set of the origin in a finite time when qi is convergent in a finite time. Next, we will prove that the compensating signal qi is convergent within in a finite time T1. The Lyapunov function candidate is chosen as . From the time derivative of VQ can be obtained
Moreover, it can deduce that can be achieved in a finite time T2 with a known constant ϑi. According to the Lemma 5, it can be obtained
where . Substituting equation (91) into (90), we have
When we choose the appropriate parameter to make hold. Then, combining Lemma 3, we can obtain
where and . Hence, we can know the VQ from Lemma 2 that can converge to the origin in a finite time T1.
From the can attained. Thus, the tracking error z1 can converge to a small residual set of the origin in a finite time .
Now, to demonstrate Zeno behavior will be excluded, let existing positive number with . Moreover, the can be derived by. Then
Combining the definition of ϖ(t) and Ito Lemma, the can be given
where
From equation (96), is continuous function of bounded variables , which implies existing a bound. Combining the Lemma 6, it can be distinctly obtained that and ℓ is a positive number. Furthermore, it can be acquired that and e(tk) = 0.
Applying the Lagrange Mean Value Theorem, it follows that
According to (94), (97), and e(tk) = 0 one gets
From equation (98), it can be deduced that . Therefore, the Zeno behavior is avoided completely in the proposed relative threshold triggered mechanism.
Remark 3. Note that the first-order derivative of the controllers does not appear as ”singularity” in this paper due to the presence of tanh(·). In,62 the derivative of the controller appears as , which is obviously 4β − 4 < 0. Thus, when vi approaches zero, the ”singularity” can be encountered in the first-order derivative of the controllers.
Simulation
In this section, two simulation examples are given to demonstrate the validity of the proposed event-triggered adaptive neural finite-time control scheme.
Example 1: Consider the following non-strict feedback stochastic nonlinear system subject to unknown time-varying control directions, and input nonlinearities
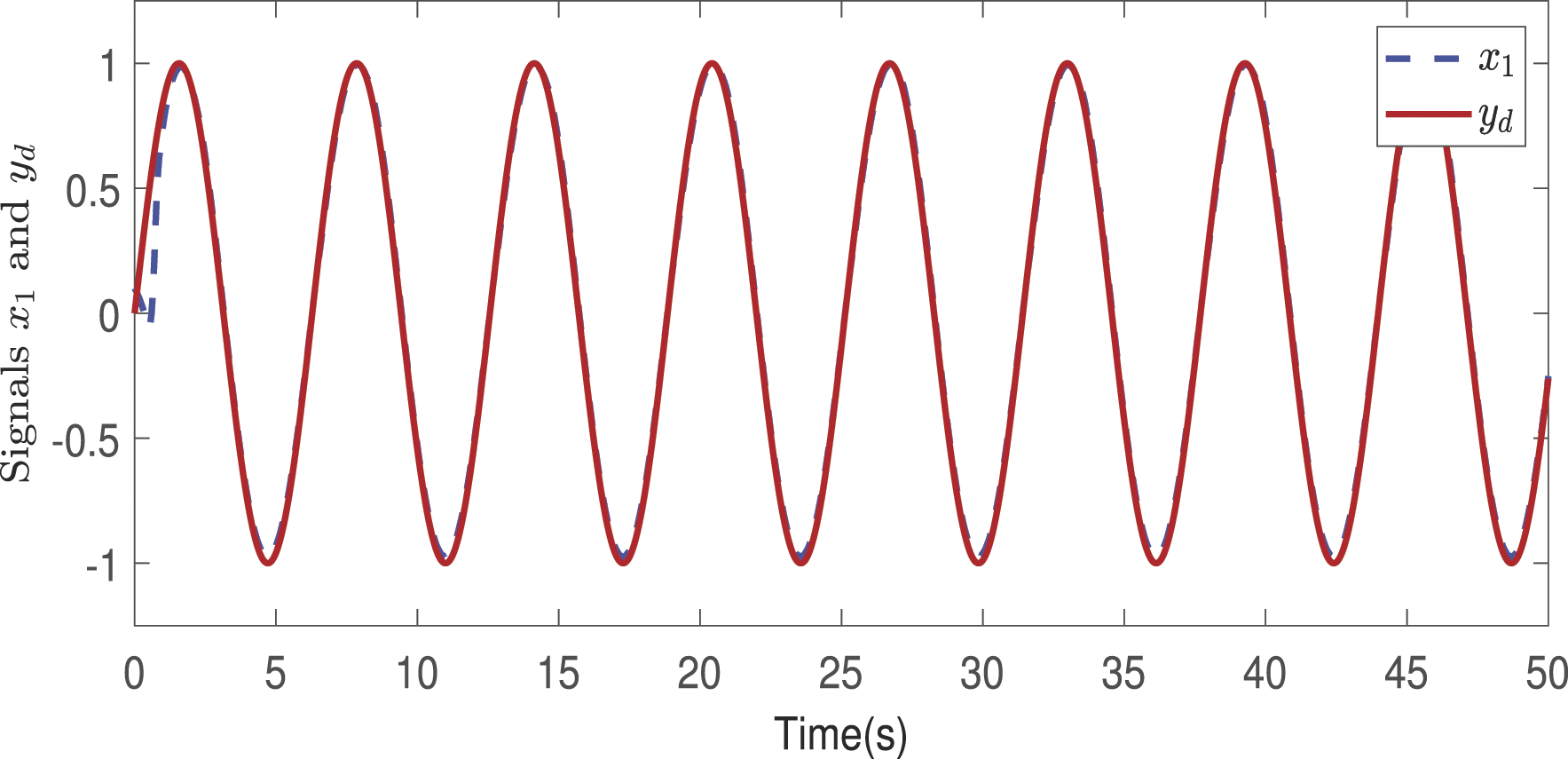
where h1(t) = −5 + 0.1 sin(0.8t) and h2(t) = −2 + 0.1 sin(3t) represent the unknown time-varying control direction. The desired trajectory is selected as yd = sin(t).
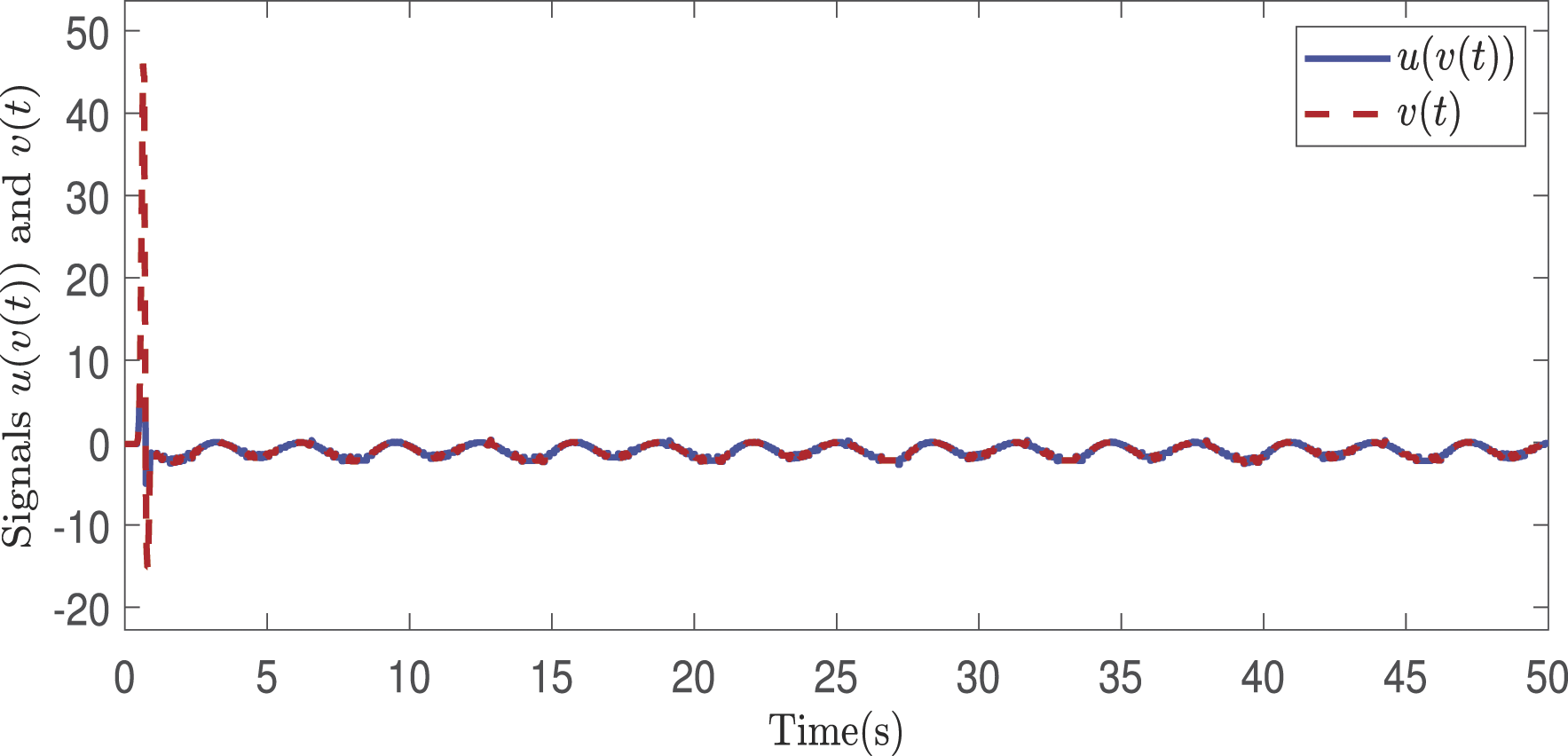
The input nonlinearities of system are described below
In the simulation experiment, design the compensating signals as follow
In addition, the virtual controllers αi, and adaptive law are designed as follow
Moreover, the event-triggered controller is designed as follow
In this simulation, the function is employed as Nussbaum function. All initial values are 0. Then, select the design parameters as and ϶ = 1.
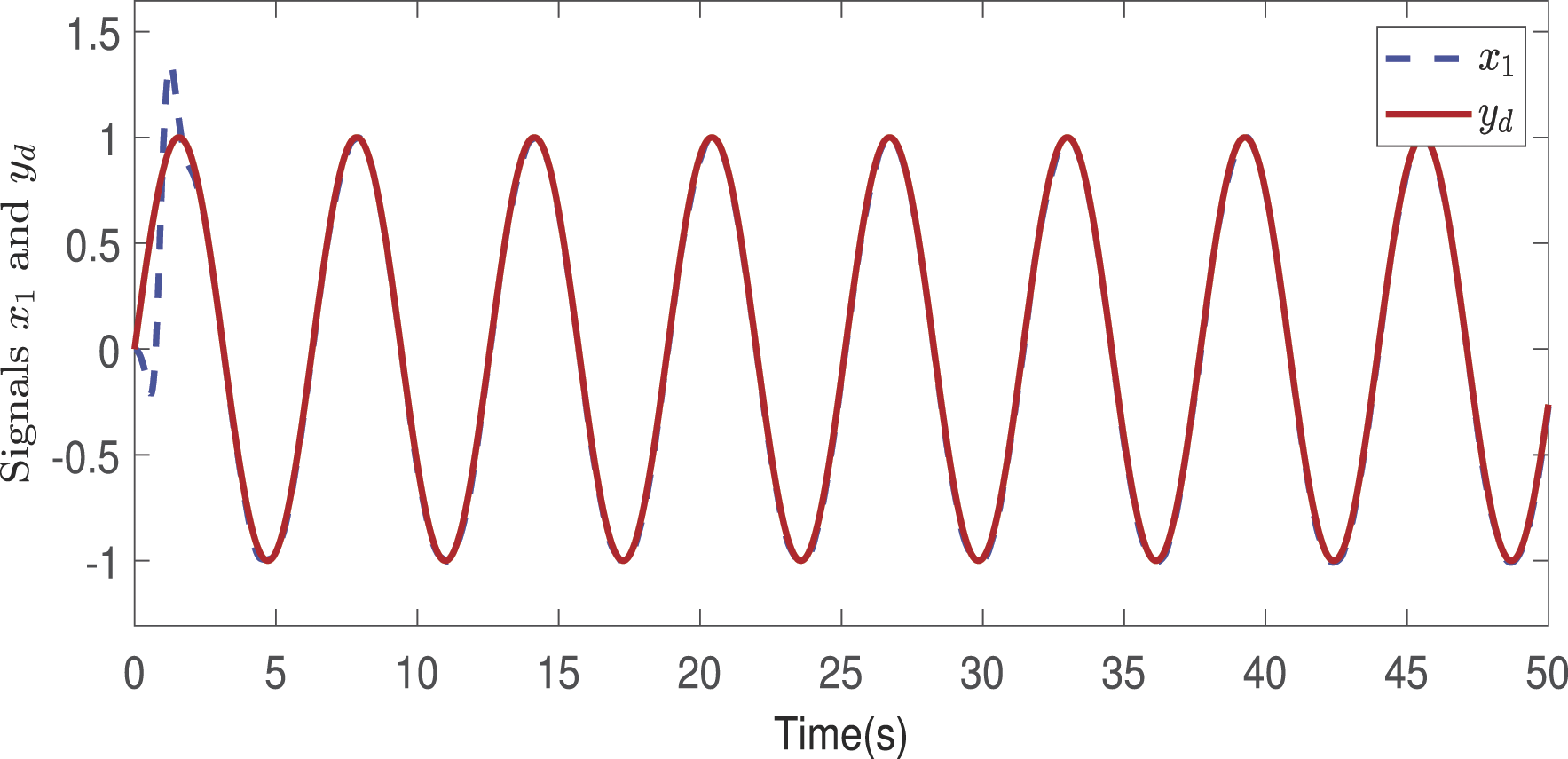
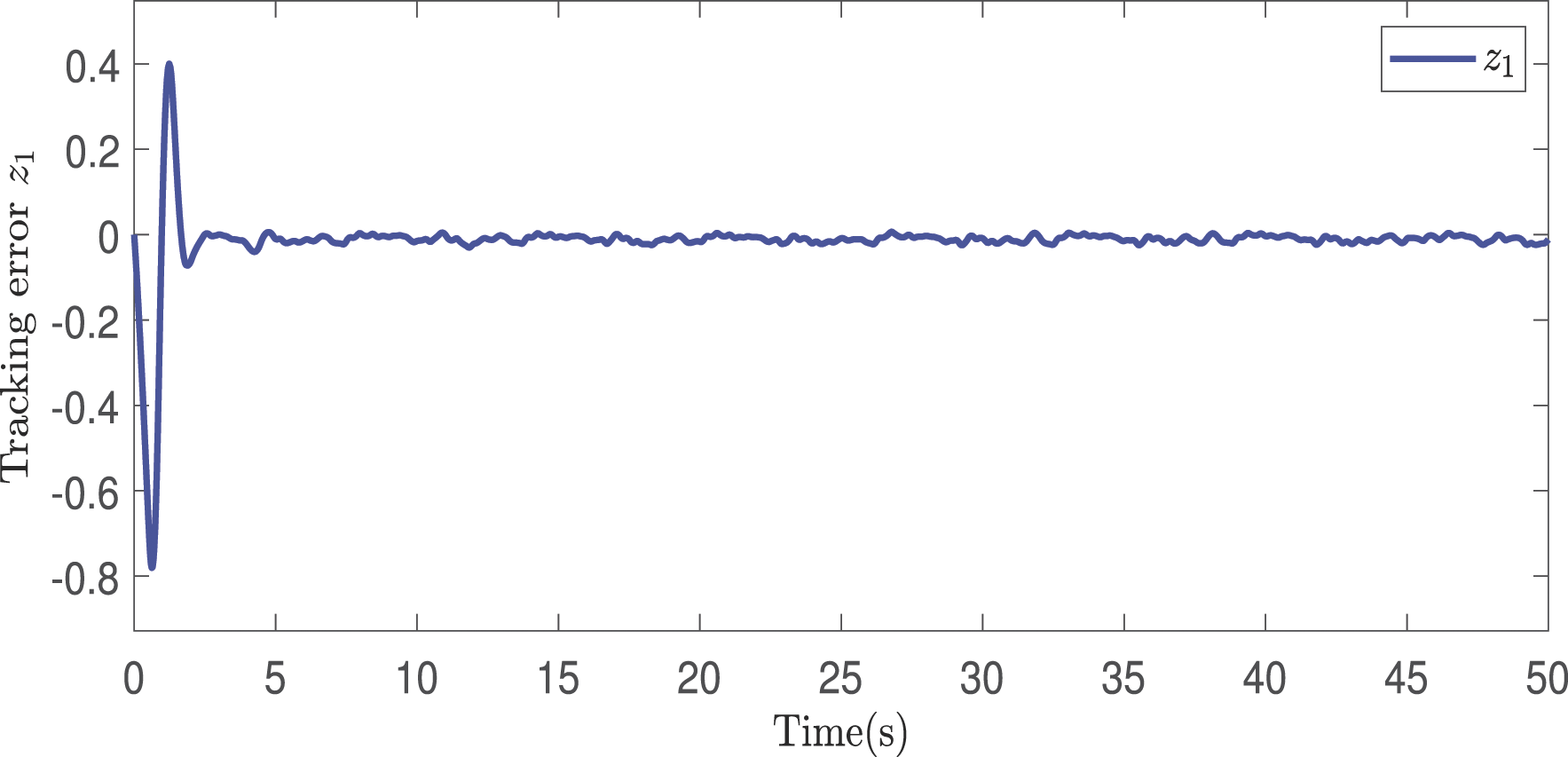
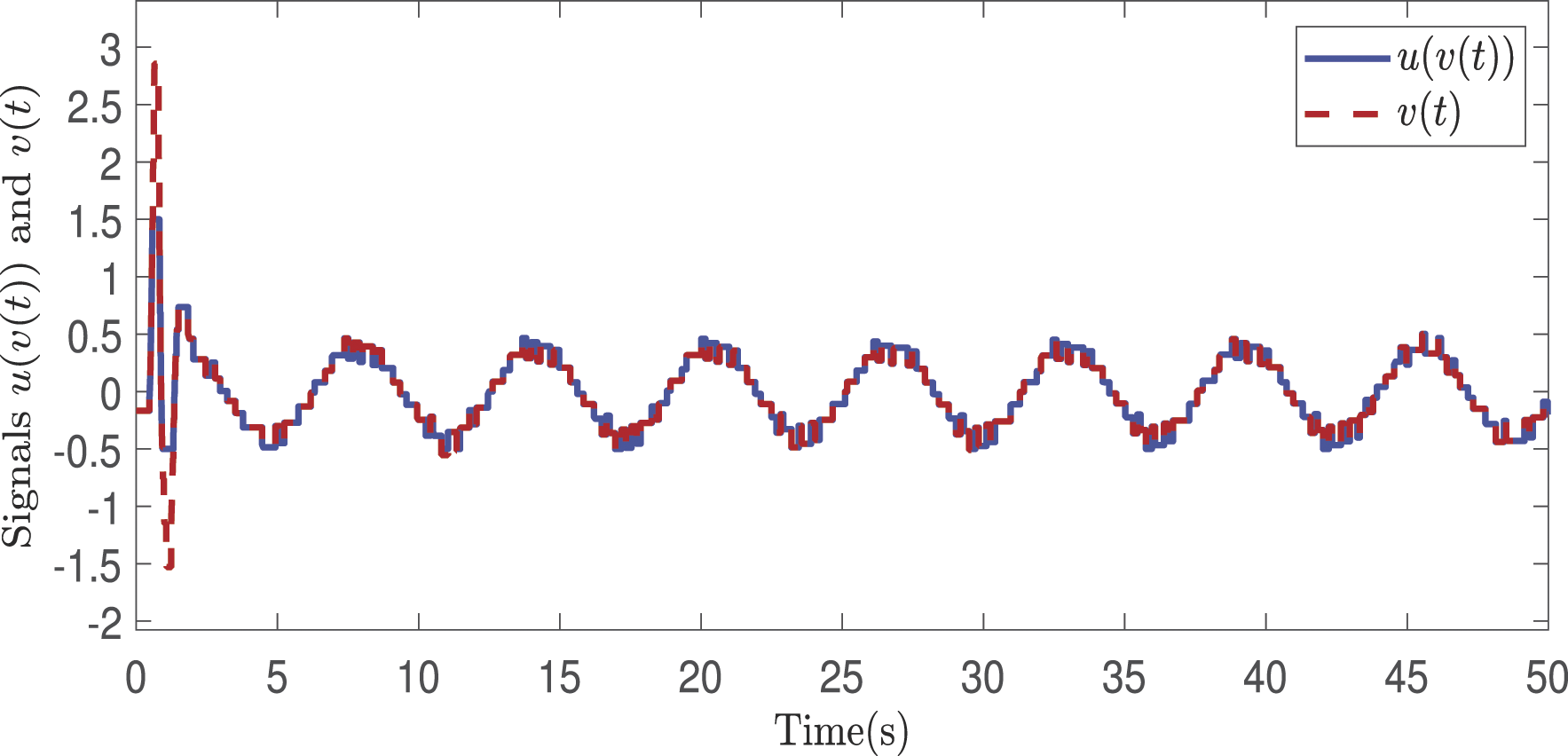
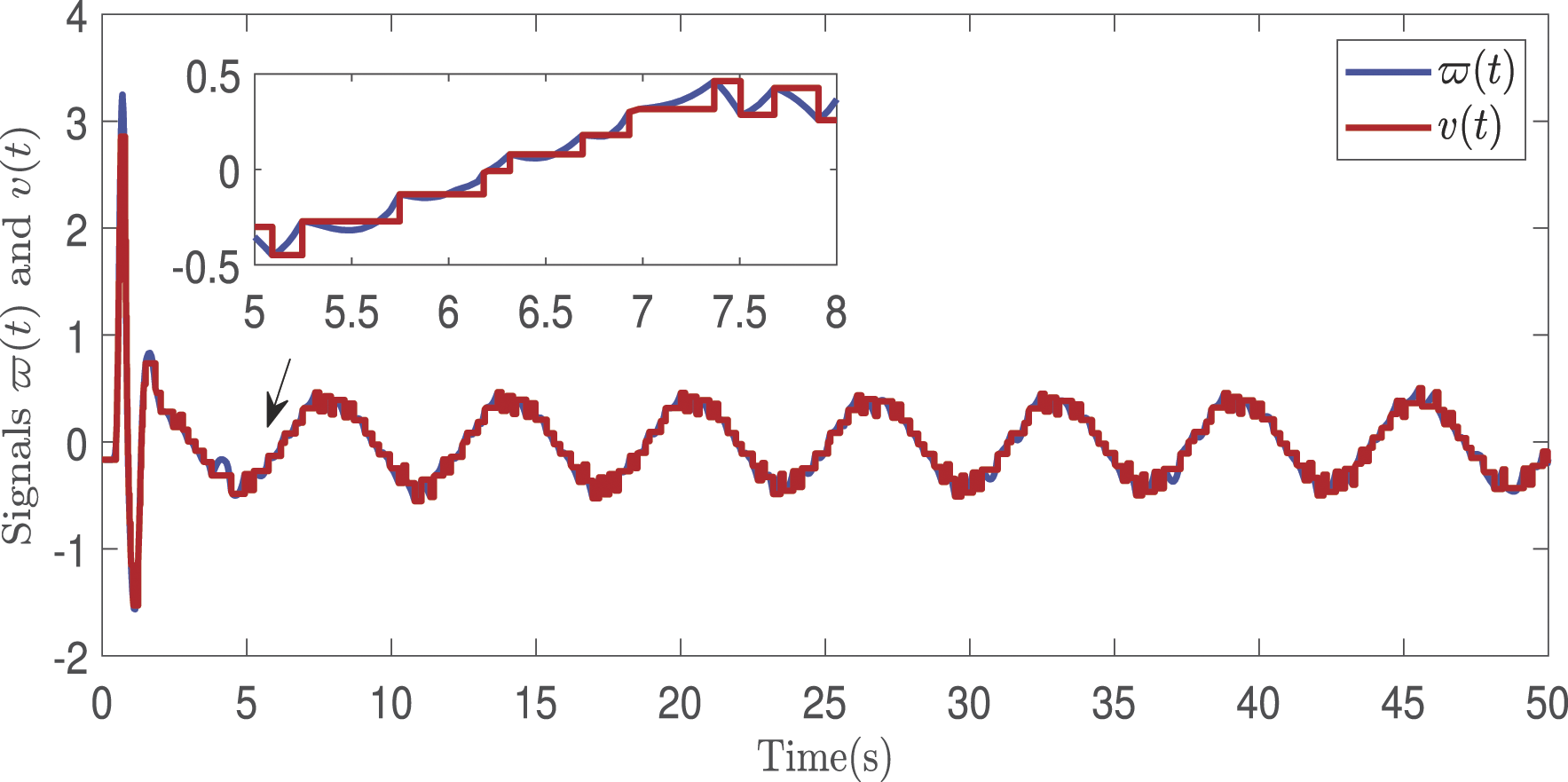
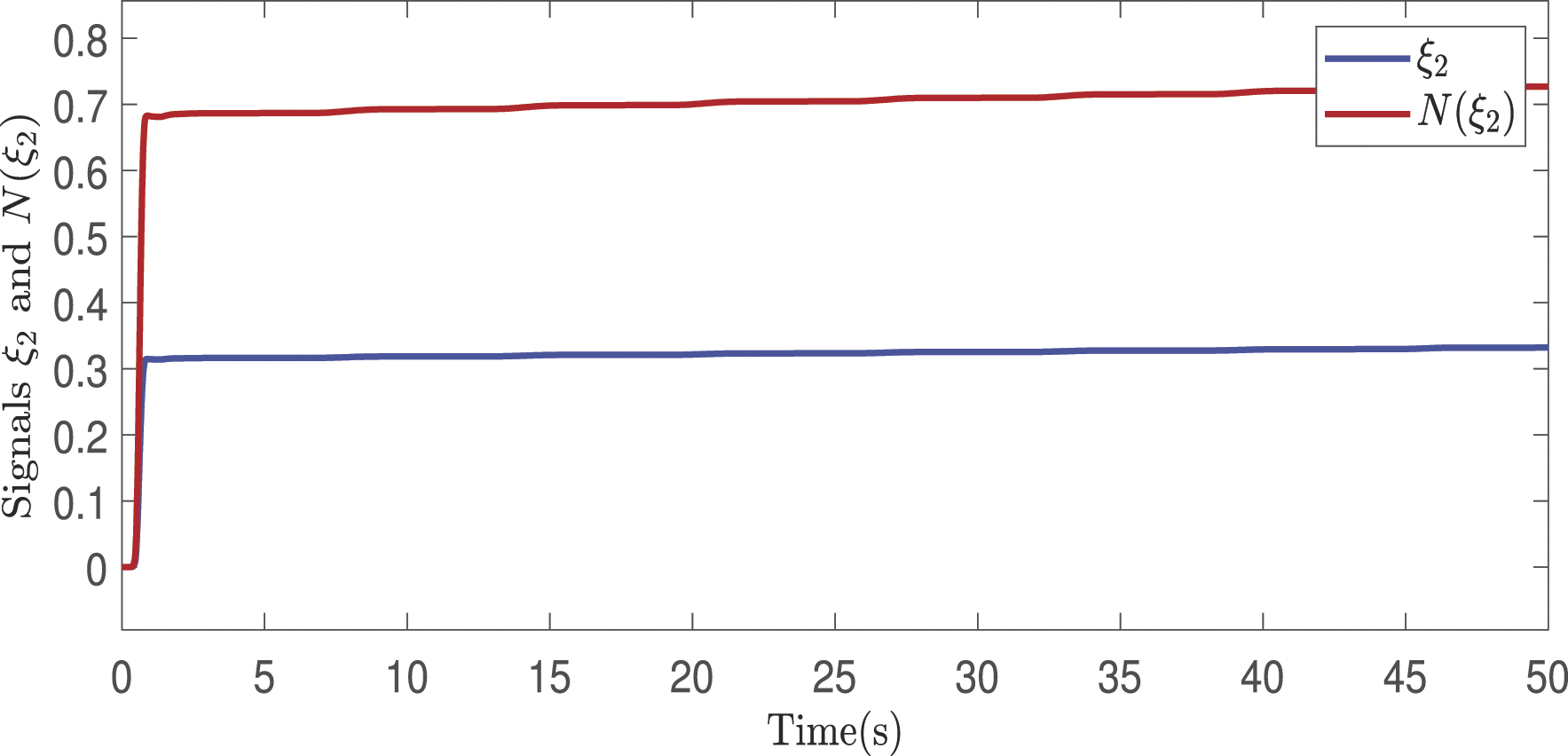
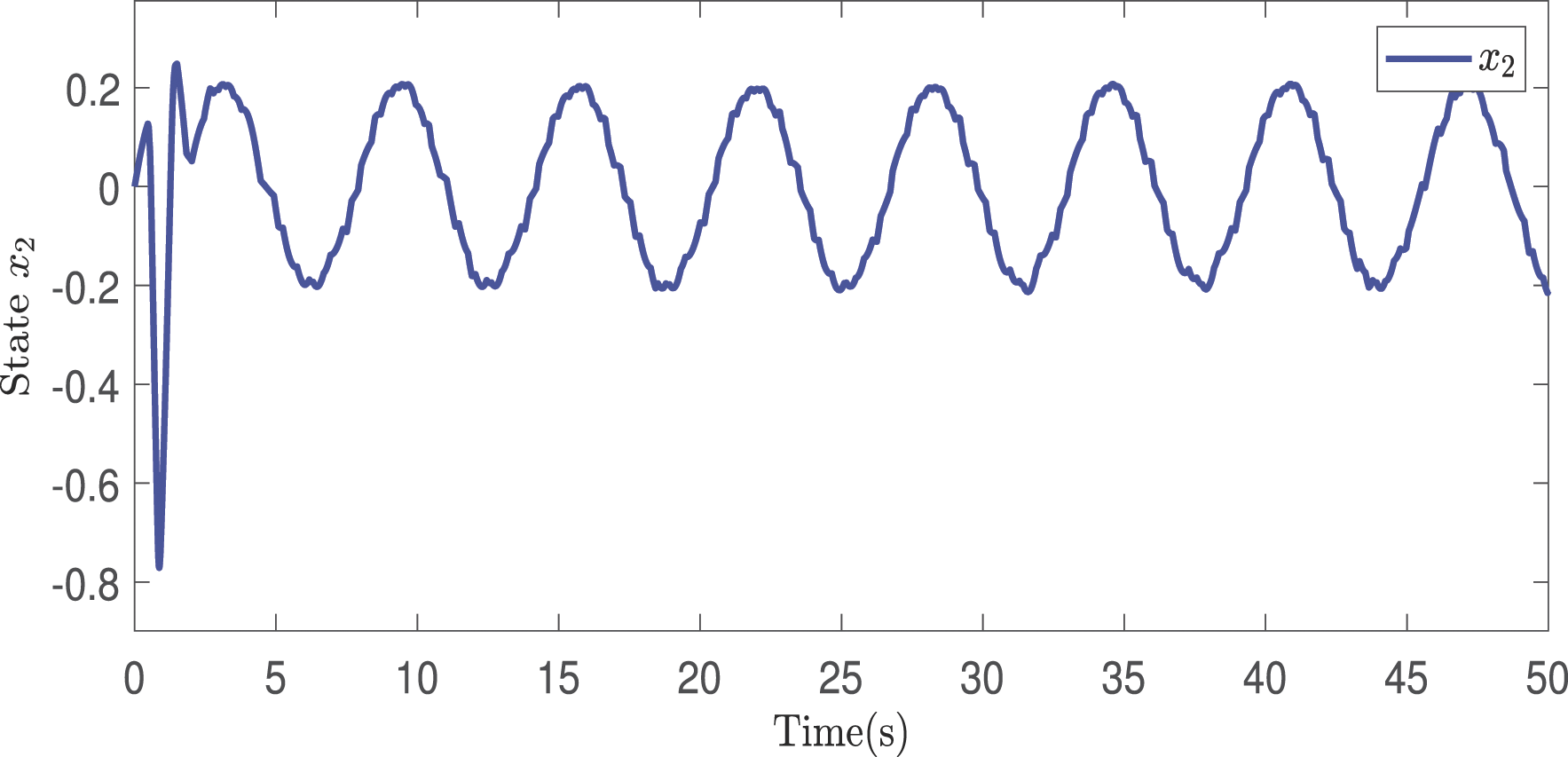
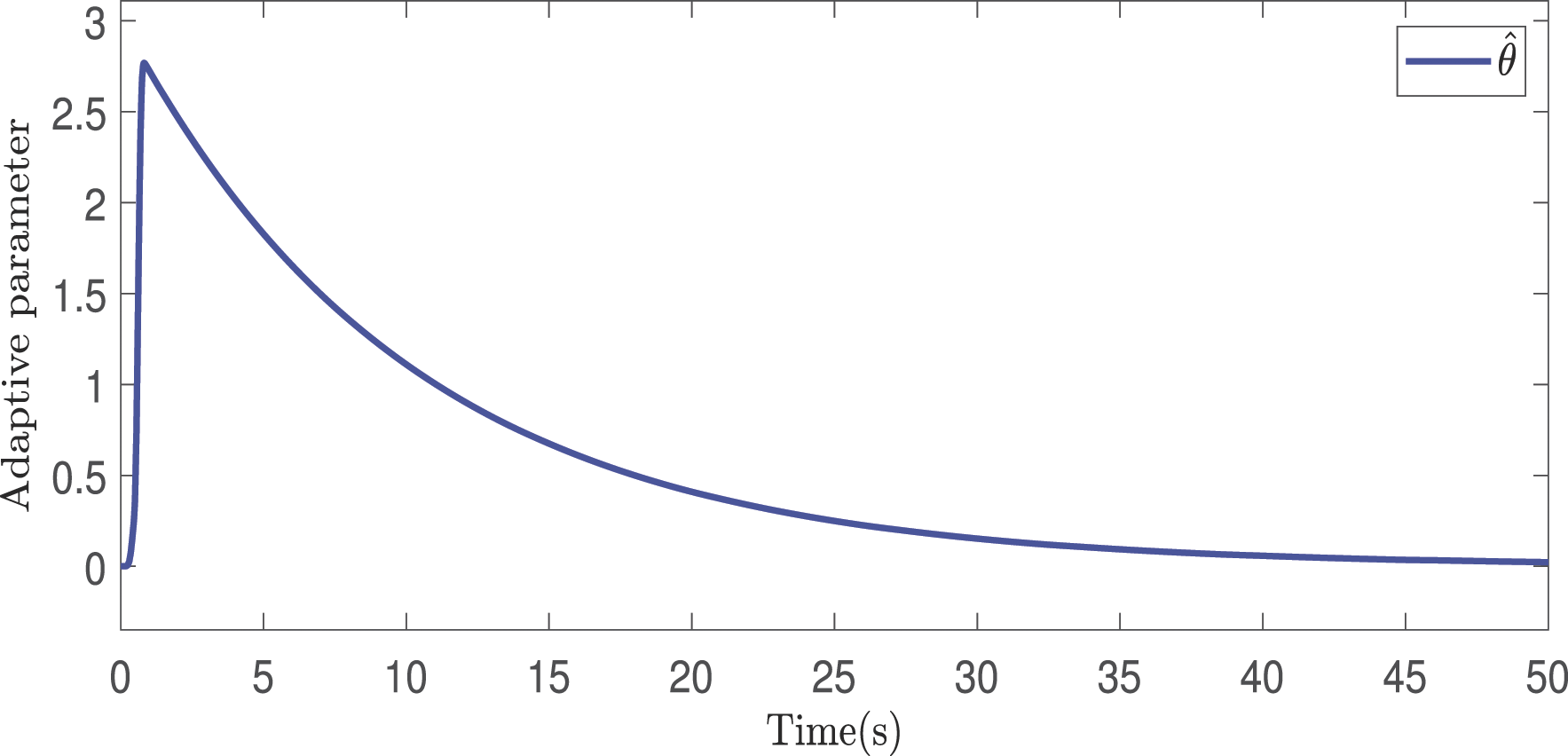
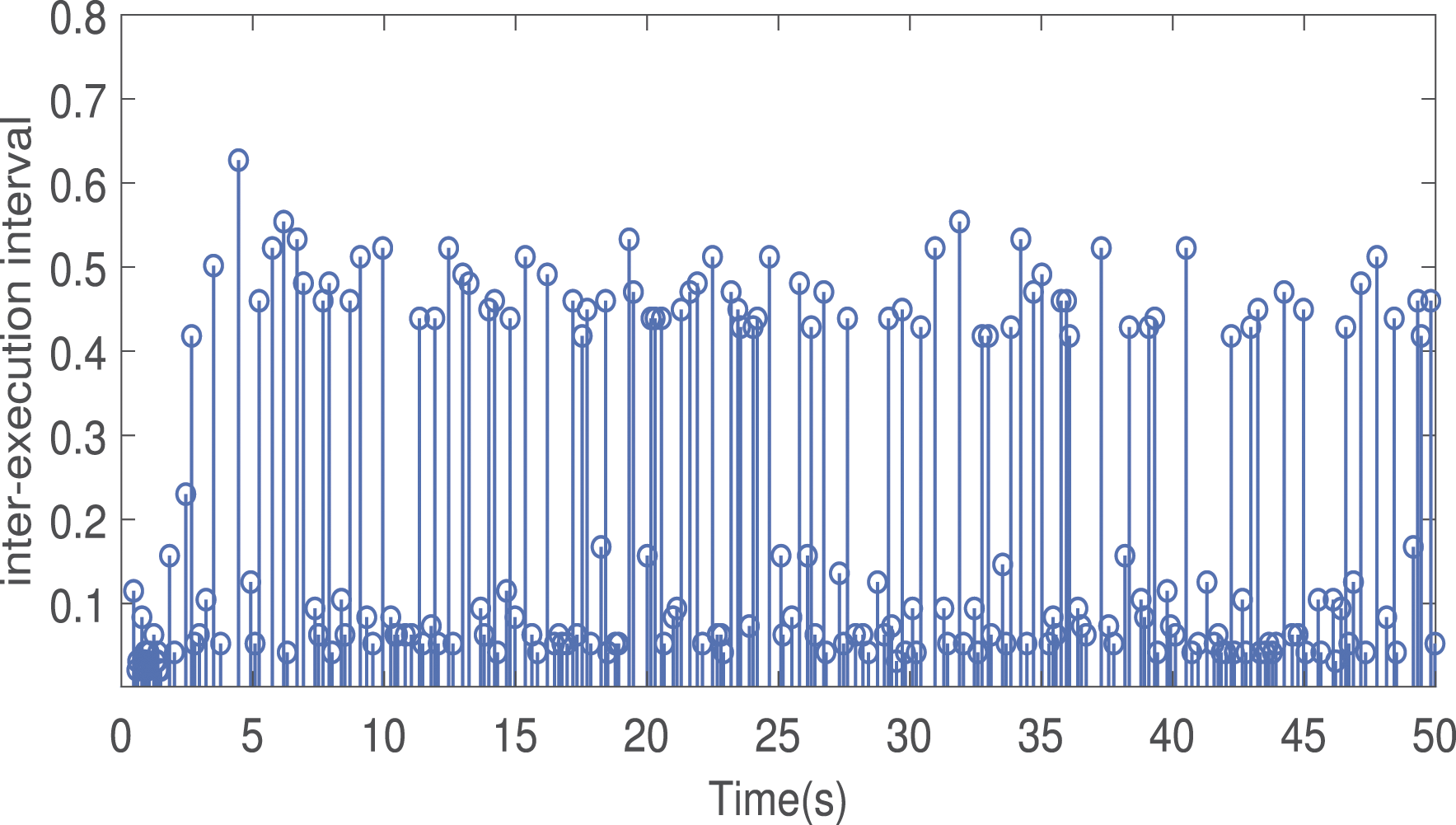
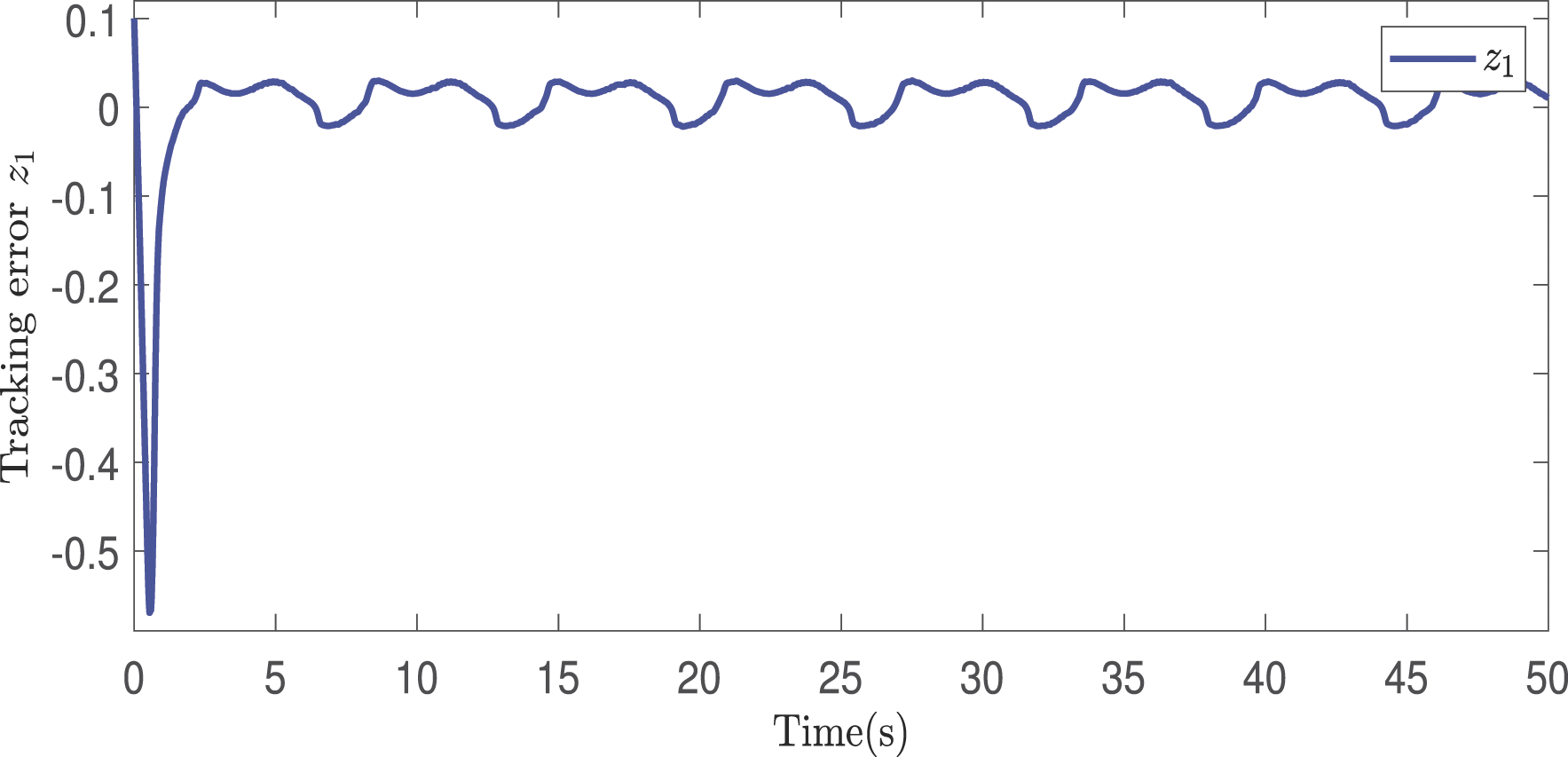
The simulation results are presented by Figure 2. From Figure 2, the trajectory of the system output x1 and the desired trajectory yd are shown. The tracking error z1 is illustrated in Figure 3 to converge to a small residual set of the origin within in a finite time. Output of actuator nonlinearities u(v(t)) and event-triggered control input v(t) are shown in Figure 4. Time-triggered control signal ϖ(t) and event-triggered control input v(t) are illustrated in Figure 5. The curves of ξ2 and N(ξ2) are presented in Figure 6. The system state x2 and the adaptive parameter are illustrated in Figure 7 in Figure 8, respectively. Time intervals tk+1 − tk of event-triggered mechanism are shown in Figure 9.
Trajectories of x1 and yd(Example 1).
The tracking error z1 (Example 1).
Trajectories u(v(t)) and v(t) (Example 1).
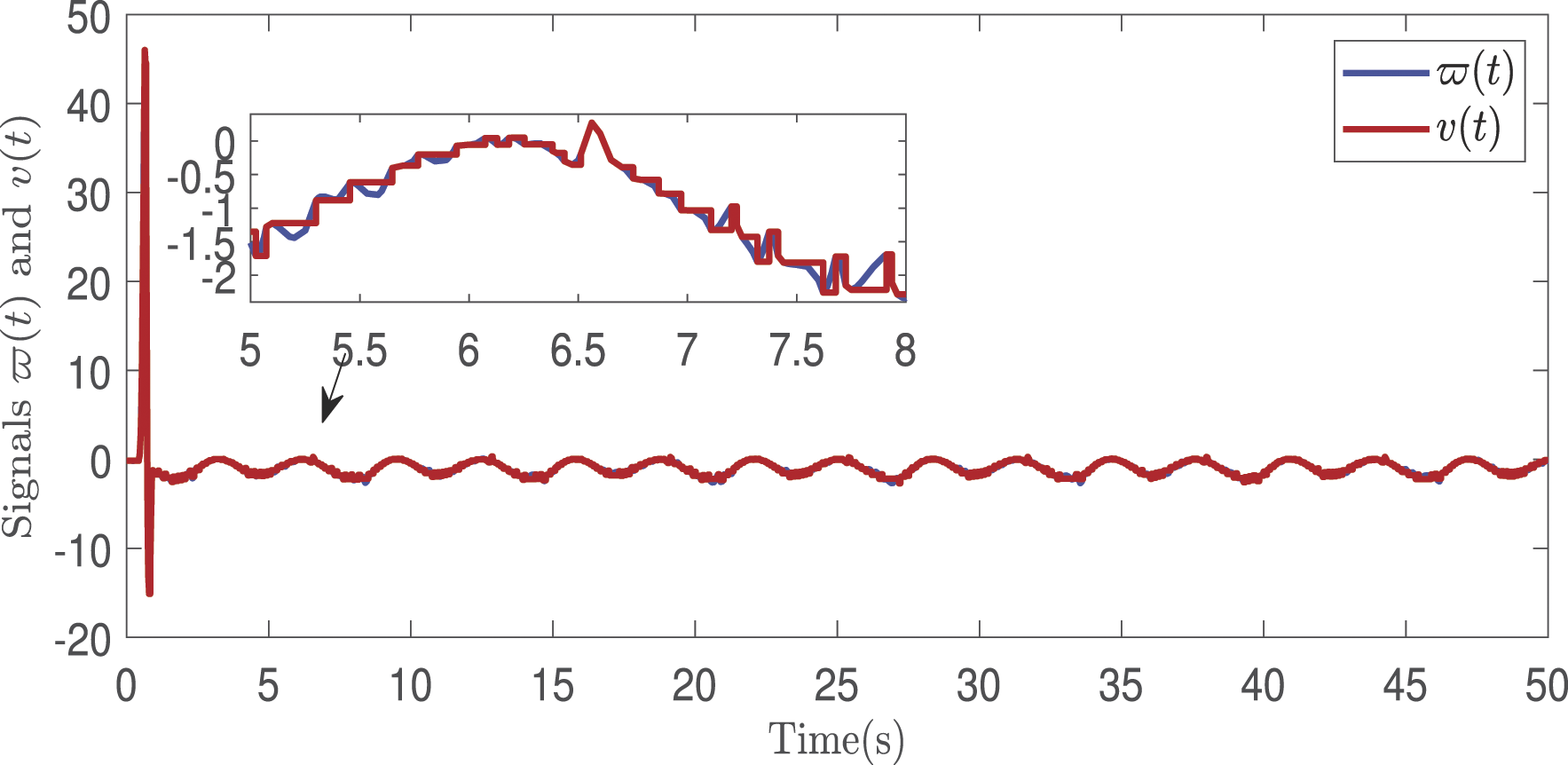
Trajectories ϖ(t) and v(t) (Example 1).
Trajectories ξ2 and N(ξ2) (Example 1).
The state x2 (Example 1).
Adaptive parameter (Example 1).
Intervals tk+1 − tk of triggering events (Example 1).
Example 2: Consider a mass-spring-damper system in63 and,33 the dynamic equation is described as follow
where h1(t) = −2 + 0.5 sin(5), h2(t) = −2 + 0.1 sin(3t), , g(x1, x2) = 0.6x1x2,and m = 2. The desired trajectory is selected as yd = sin(t). The input nonlinearities of system are described below
It is noting that the first subsystem is a linear differential equation. Then, the virtual control is described as and other controls similar to (102). In this simulation, the function is employed as Nussbaum function. The initial states are chosen as , and the other initial values are 0. Then, select the design parameters as and ϶ = 1.
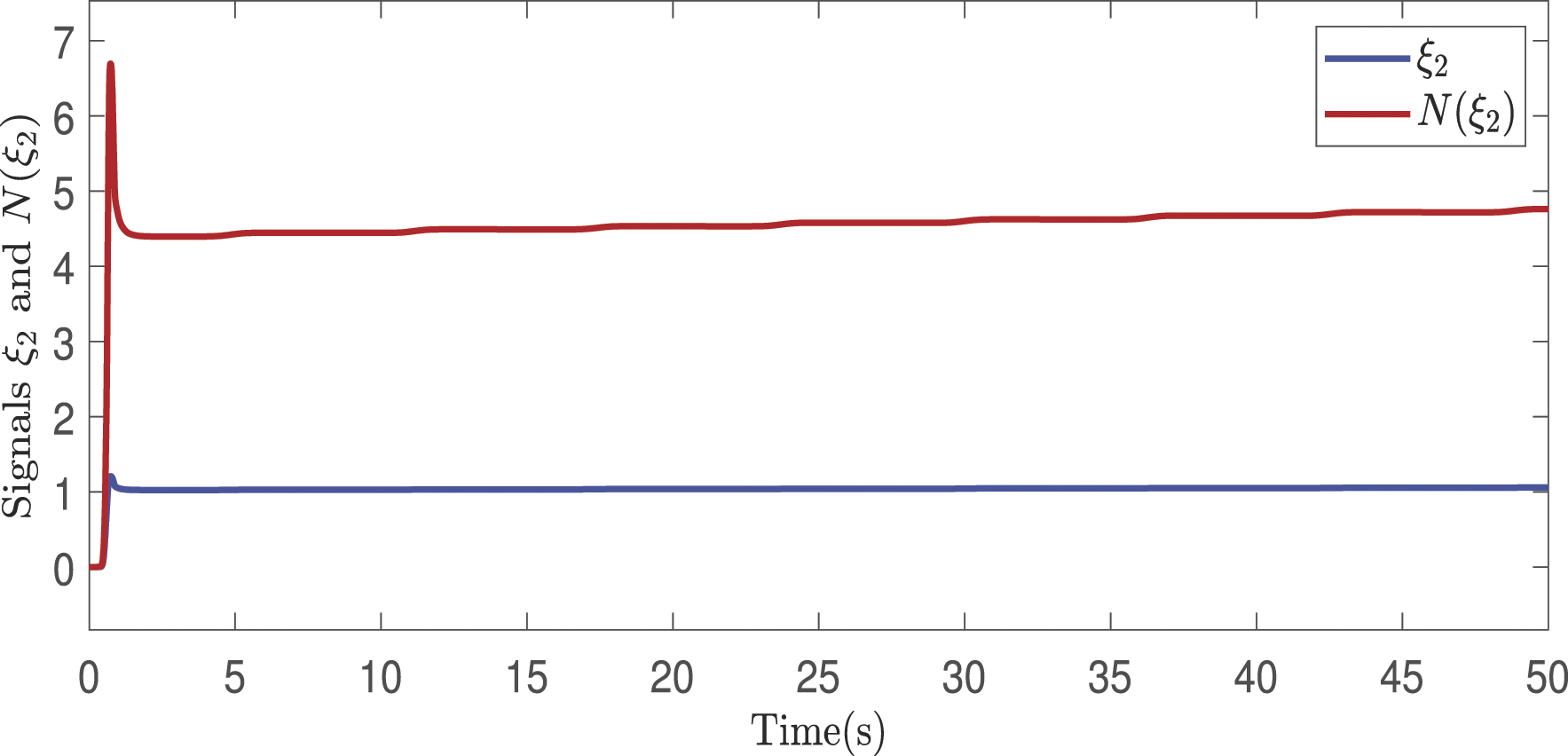
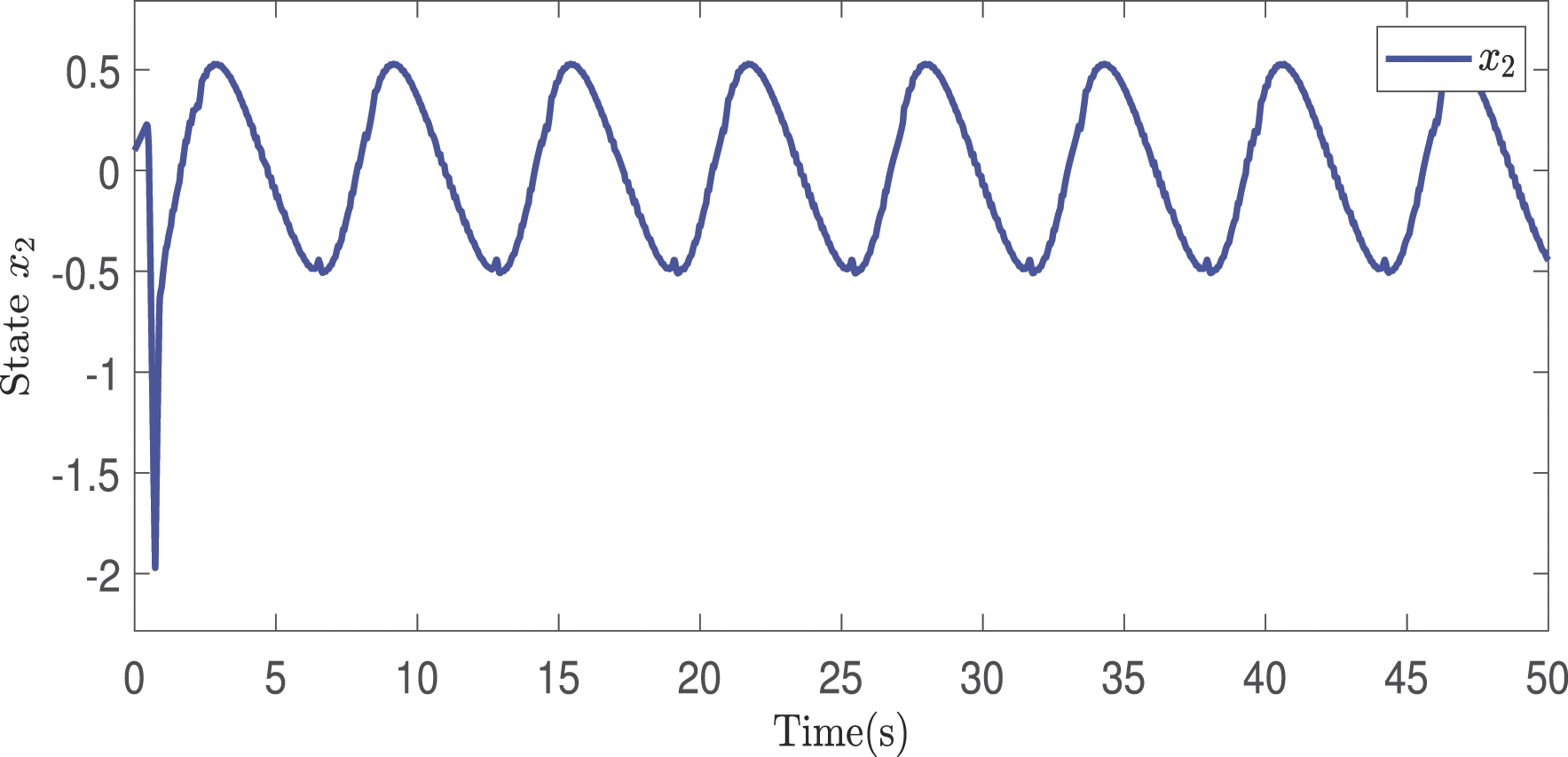
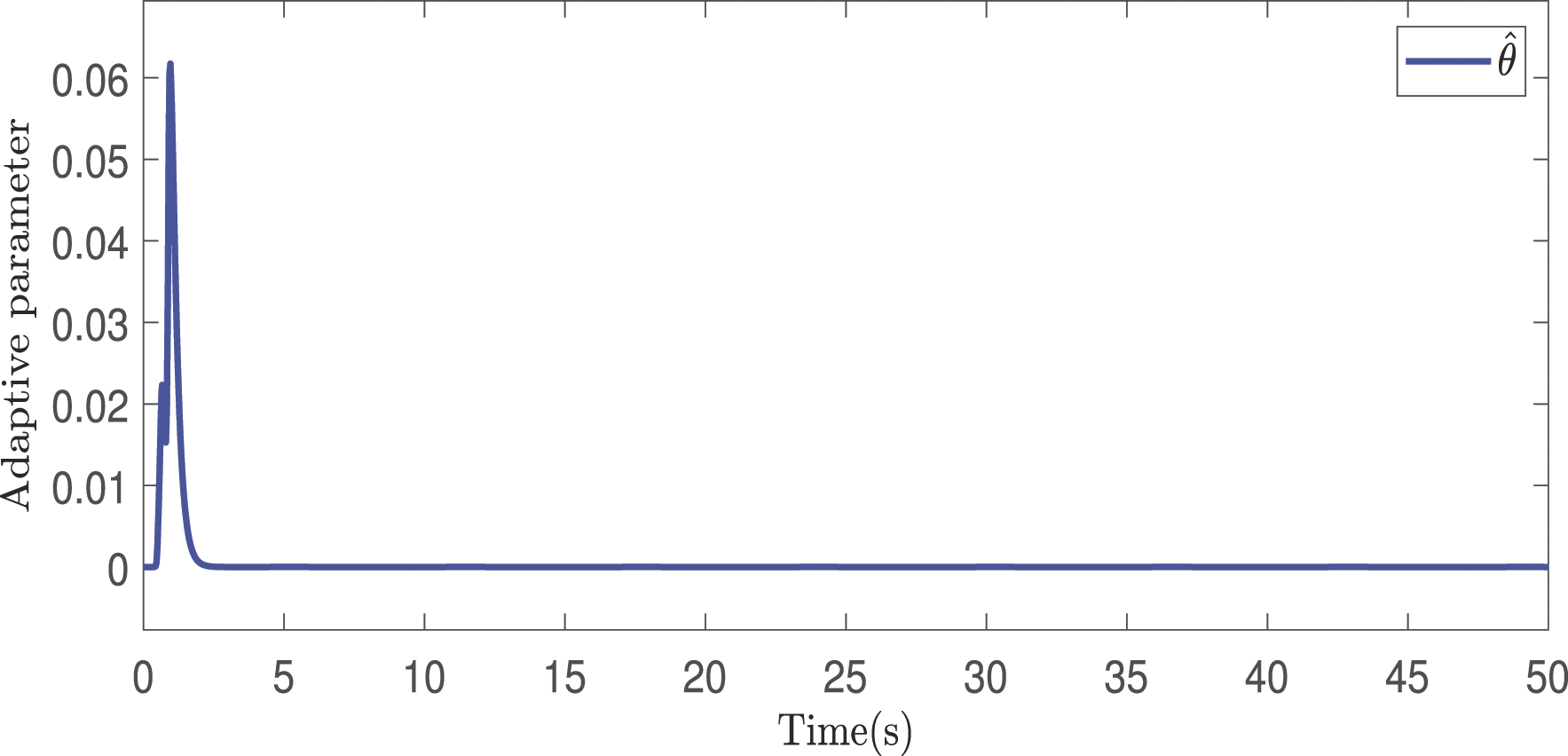
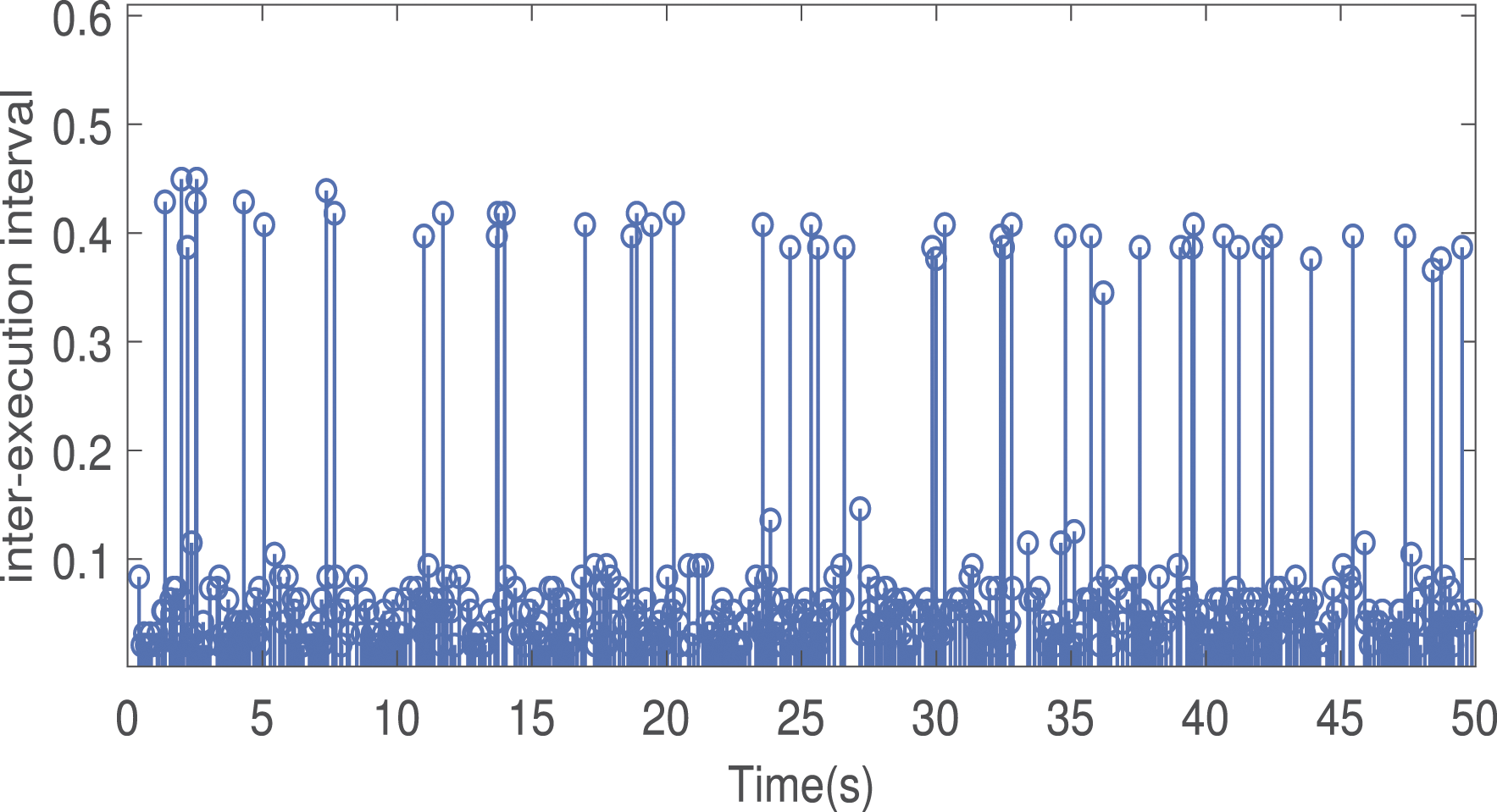
The simulation results are obtained as Figure 10. Specifically, From Figure 10, the trajectory of the system output x1 and the desired trajectory yd are presented. The tracking error z1 is illustrated in Figure 11 to converge to a small residual set of the origin in a finite time. Output of actuator nonlinearities u(v(t)) and event-triggered control input v(t) are shown in Figure 12. Time-triggered control signal ϖ(t) and event-triggered control input v(t) are illustrated in Figure 13. The curves of ξ2 and N(ξ2) are presented in Figure 14. The system state x2 and the adaptive parameter are exhibited in Figure 15 in Figure 16, respectively. Time intervals tk+1 − tk of event-triggered mechanism are shown in Figure 17.
Trajectories of x1 and yd(Example 2).
The tracking error z1 (Example 2).
Trajectories u(v(t)) and v(t) (Example 2).
Trajectories ϖ(t) and v(t) (Example 2).
Trajectories of ξ2 and N(ξ2) (Example 2).
The state x2 (Example 2).
Adaptive parameter (Example 2).
Intervals tk+1 − tk of triggering events (Example 2).
From the above simulation images, the designed event-triggered adaptive neural finite-time tracking control scheme can achieve the desirable control performance and the Zeno behavior can be avoided.
Conclusion
In this paper, a dynamic-surface-based event-triggered adaptive neural finite-time tracking control scheme has been developed for a class of non-strict feedback stochastic nonlinear systems subject to time-varying unknown control directions, and input nonlinearities. To begin with, an improved event-triggered mechanism is presented to preserve communication resources and lessen the strain of communication. Secondly, a novel criterion is proposed in Lemma 1 to provide a powerful tool for analyzing time-varying unknown control directions, and input nonlinearities of stochastic systems. Furthermore, neural networks (NNs) are utilized to cope with unknown functions.
Note that this work considers only the condition in which system states can be measurable. Supposing that system states cannot be measurable, how to design an event-triggered adaptive neural finite-time tracking controller for the systems is interesting and meaningful. Therefore, we will further tend the event-triggered adaptive finite-time control for stochastic nonlinear multi-agent systems when system states are unmeasurable.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Science Foundation of Xi'an University of Architecture and Technology (ZR18037), Shaanxi Province Natural Science Fund of China (2020JM-490), Special Fund of the National Natural Science Foundation of China; 11626183): National Natural Science Foundation of China (12001418), Postdoctoral Science Foundation of China (2018M633476), Scientific Research Plan Projects of Shaanxi Education Department (19JK0466), Youth Talent Promotion Program of Shaanxi Association for Science and Technology (20180505).
ORCID iDs
Hongyun Yue
Wufei Zhang
References
1.
FangLDingSParkJH, et al.Adaptive fuzzy control for nontriangular stochastic high-order nonlinear systems subject to asymmetric output constraints. IEEE Trans Cybern2020; 52; 1–12. DOI: 10.1109/TCYB.2020.3000920
2.
LiDLiuLLiuYJ, et al.Adaptive nn control without feasibility conditions for nonlinear state constrained stochastic systems with unknown time delays. IEEE Trans Cybern2019; 49(12): 4485–4494. DOI: 10.1109/TCYB.2019.2903869
3.
LiuHLiXLiuX, et al.Adaptive neural network prescribed performance bounded-h∞ tracking control for a class of stochastic nonlinear systems. IEEE Trans Neural Networks Learn Syst2020; 31(6): 2140–2152. DOI: 10.1109/TNNLS.2019.2928594
4.
ShuYTongYYuC. Robust neural tracking control for switched nonaffine stochastic nonlinear systems with unknown control directions and backlash-like hysteresis. J Franklin Inst2020; 357(5): 2791–2812. DOI: 10.1016/j.jfranklin.2019.12.011
5.
SuHZhangW. Adaptive fuzzy control of stochastic nonlinear systems with fuzzy dead zones and unmodeled dynamics. IEEE Trans Cybern2020; 50(2): 587–599. DOI: 10.1109/TCYB.2018.2869922
6.
YuXWangTQiuJ, et al.Barrier lyapunov function-based adaptive fault-tolerant control for a class of strict-feedback stochastic nonlinear systems. IEEE Trans Cybern2021; 51(2): 938–946. DOI: 10.1109/TCYB.2019.2941367
7.
TakácsÁKovácsLRudasIJ, et al.Models for force control in telesurgical robot systems. Acta Polytech Hung2015; 12(8): 21. DOI: 10.12700/aph.12.8.2015.8.6
8.
ZhaoEYuJLiuJ, et al.Neuroadaptive dynamic surface control for induction motors stochastic system based on reduced-order observer. ISA Trans2021. DOI:10.1016/j.isatra.2021.09.006
9.
LiYYangTTongS. Adaptive neural networks finite-time optimal control for a class of nonlinear systems. IEEE Trans Neural Networks Learn Syst2020; 31(11): 4451–4460. DOI: 10.1109/TNNLS.2019.2955438
10.
LiuJDNiuBKaoYG, et al.Decentralized adaptive command filtered neural tracking control of large-scale nonlinear systems: an almost fast finite-time framework. IEEE Trans Neural Networks Learn Syst2021; 32(8): 3621–3632. DOI: 10.1109/TNNLS.2020.3015847
11.
ZhangJXiaJSunW, et al.Command filter-based finite-time adaptive fuzzy control for nonlinear systems with uncertain disturbance. J Franklin Inst2019; 356(18): 11270–11284. DOI: 10.1016/j.jfranklin.2019.05.042
12.
YinJKhooSManZ, et al.Finite-time stability and instability of stochastic nonlinear systems. Automatica2011; 47(12): 2671–2677. DOI: 10.1016/j.automatica.2011.08.050
13.
LiHXuXPengY, et al.Efficient learning for selecting important nodes in random network. IEEE Trans Automatic Control2021; 66(3): 1321–1328. DOI: 10.1109/TAC.2020.2989753
14.
ZhangHLiuYDaiJ, et al.Command filter based adaptive fuzzy finite-time control for a class of uncertain nonlinear systems with hysteresis. IEEE Trans Fuzzy Syst2021; 29(9): 2553–2564. DOI: 10.1109/TFUZZ.2020.3003499
15.
WangFLiuZZhangY, et al.Adaptive finite-time control of stochastic nonlinear systems with actuator failures. Fuzzy Sets Syst2019; 374: 170–183. DOI: 10.1016/j.fss.2018.12.005
16.
FangLMaLDingS, et al.Finite-time stabilization for a class of high-order stochastic nonlinear systems with an output constraint. Appl Maths Comput2019; 358: 63–79. DOI: 10.1016/j.amc.2019.03.067
17.
LiuYZhuQ. Adaptive neural network finite-time tracking control of full state constrained pure feedback stochastic nonlinear systems. J Franklin Inst2020; 357(11): 6738–6759. DOI: 10.1016/j.jfranklin.2020.04.048
18.
WangHLiuSYangX. Adaptive neural control for non-strict-feedback nonlinear systems with input delay. Inf Sci2020; 514: 605–616. DOI: 10.1016/j.ins.2019.09.043
19.
ChenBLiuKLiuX, et al.Approximation-based adaptive neural control design for a class of nonlinear systems. IEEE Trans Cybern2014; 44(5): 610–619. DOI: 10.1109/TCYB.2013.2263131
20.
LiuYZhuQZhaoN, et al.Fuzzy approximation-based adaptive finite-time control for nonstrict feedback nonlinear systems with state constraints. Inf Sci2021; 548: 101–117. DOI: 10.1016/j.ins.2020.09.042
21.
WangYZhangJZhangH, et al.Finite-time adaptive neural control for nonstrict-feedback stochastic nonlinear systems with input delay and output constraints. Appl Maths Comput2021; 393: 125756. DOI: 10.1016/j.amc.2020.125756
22.
DuJGuoCYuS, et al.Adaptive autopilot design of time-varying uncertain ships with completely unknown control coefficient. IEEE J Oceanic Eng2007; 32(2): 346–352. DOI: 10.1109/JOE.2007.893684
23.
SuY. Cooperative global output regulation of second-order nonlinear multi-agent systems with unknown control direction. IEEE Trans Automatic Control2015; 60(12): 3275–3280. DOI: 10.1109/TAC.2015.2426273
24.
NussbaumRD. Some remarks on a conjecture in parameter adaptive control. Syst Control Lett1983; 3(5): 243–246. DOI: 10.1016/0167-6911(83)90021-x
25.
YeXDJiangJP. Adaptive nonlinear design without a priori knowledge of control directions. IEEE Trans Autom Control1998; 43(11): 1617–1621. DOI: 10.1109/9.728882
26.
DingZ. Adaptive consensus output regulation of a class of nonlinear systems with unknown high-frequency gain. Automatica2015; 51: 348–355. DOI: 10.1016/j.automatica.2014.10.079
27.
ChenCLiuZXieK, et al.Adaptive fuzzy asymptotic control of mimo systems with unknown input coefficients via a robust nussbaum gain-based approach. IEEE Trans Fuzzy Syst2017; 25(5): 1252–1263. DOI: 10.1109/TFUZZ.2016.2604848
28.
Shahriari-KahkeshiMMeskinN. Adaptive cooperative control of nonlinear multi-agent systems with uncertain time-varying control directions and dead-zone nonlinearity. Neurocomputing2021; 464: 151–163. DOI: 10.1016/j.neucom.2021.08.065
29.
TongSSuiSLiY. Adaptive fuzzy decentralized output stabilization for stochastic nonlinear large-scale systems with unknown control directions. IEEE Trans Fuzzy Syst2014; 22(5): 1365–1372. DOI: 10.1109/TFUZZ.2013.2291554
30.
YuZLiSYuZ, et al.Adaptive neural output feedback control for nonstrict-feedback stochastic nonlinear systems with unknown backlash-like hysteresis and unknown control directions. IEEE Trans Neural Networks Learn Syst2018; 29(4): 1147–1160. DOI: 10.1109/TNNLS.2017.2669088
31.
XiaJLianYSuSF, et al.Observer-based event-triggered adaptive fuzzy control for unmeasured stochastic nonlinear systems with unknown control directions. IEEE Trans Cybern2021: 1–12. DOI: 10.1109/TCYB.2021.3069853
32.
ShuYTongYYuC. Robust neural tracking control for switched nonaffine stochastic nonlinear systems with unknown control directions and backlash-like hysteresis. J Franklin Inst2020; 357(5): 2791–2812. DOI: 10.1016/j.jfranklin.2019.12.011
33.
LiuYLMaHJ. Adaptive fuzzy tracking control of nonlinear switched stochastic systems with prescribed performance and unknown control directions. IEEE Trans Syst Man, Cybern Syst2020; 50(2): 590–599. DOI: 10.1109/TSMC.2017.2764685
34.
ShuYTongYYuC. Robust neural tracking control for switched nonaffine stochastic nonlinear systems with unknown control directions and backlash-like hysteresis. J Franklin Inst2020; 357(5): 2791–2812. DOI: 10.1016/j.jfranklin.2019.12.011
35.
ChenCLiuZXieK, et al.Adaptive neural control of mimo stochastic systems with unknown high-frequency gains. Inf Sci2017; 418–419: 513–530. DOI: 10.1016/j.ins.2017.08.027
36.
QiuJSunKWangT, et al.Observer-based fuzzy adaptive event-triggered control for pure-feedback nonlinear systems with prescribed performance. IEEE Trans Fuzzy Syst2019; 27(11): 2152–2162. DOI: 10.1109/TFUZZ.2019.2895560
37.
KongLYuXZhangS. Neuro-learning-based adaptive control for state-constrained strict-feedback systems with unknown control direction. ISA Trans2021; 112: 12–22. DOI: 10.1016/j.isatra.2020.12.001
38.
WuLBParkJHXieXP, et al.Adaptive asymptotic tracking control of uncertain nonlinear systems based on taylor decoupling and event-trigger. IEEE Trans Syst Man, Cybern Syst2021; 52: 1–8. DOI: 10.1109/TSMC.2020.3034579
39.
LiYXHouZCheWW, et al.Event-based design of finite-time adaptive control of uncertain nonlinear systems. IEEE Trans Neural Networks Learn Syst2021: 1–10. DOI: 10.1109/TNNLS.2021.3054579
40.
WangHXuKQiuJ. Event-triggered adaptive fuzzy fixed-time tracking control for a class of nonstrict-feedback nonlinear systems. IEEE Trans Circuits Syst I Regular Pap2021; 68(7): 3058–3068. DOI: 10.1109/TCSI.2021.3073024
41.
ZhuZPanYZhouQ, et al.Event-triggered adaptive fuzzy control for stochastic nonlinear systems with unmeasured states and unknown backlash-like hysteresis. IEEE Trans Fuzzy Syst2021; 29(5): 1273–1283. DOI: 10.1109/TFUZZ.2020.2973950
42.
LiuYZhuQ. Event-triggered adaptive neural network control for stochastic nonlinear systems with state constraints and time-varying delays. IEEE Trans Neural Networks Learn Syst2021: 1–13. DOI: 10.1109/TNNLS.2021.3105681
43.
ZouariFIbeasABoulkrouneA, et al.Neural network controller design for fractional-order systems with input nonlinearities and asymmetric time-varying pseudo-state constraints. Chaos, Solitons Fractals2021; 144: 110742. DOI: 10.1016/j.chaos.2021.110742
44.
MalekSAShahrokhiMVafaE, et al.Adaptive prescribed performance control of switched mimo uncertain nonlinear systems subject to unmodeled dynamics and input nonlinearities. Int J Robust Nonlinear Control2018; 28(18): 5981–5996. DOI: 10.1002/rnc.4352
45.
KamalamiriAShahrokhiMMohitM. Adaptive finite-time neural control of non-strict feedback systems subject to output constraint, unknown control direction, and input nonlinearities. Inf Sci2020; 520: 271–291. DOI: 10.1016/j.ins.2020.02.005
46.
ZhangJXiaJSunW, et al.Finite-time tracking control for stochastic nonlinear systems with full state constraints. Appl Maths Comput2018; 338: 207–220. DOI: 10.1016/j.amc.2018.05.040
47.
ZhaoNNWuLBOuyangXY, et al.Finite-time adaptive fuzzy tracking control for nonlinear systems with disturbances and dead-zone nonlinearities. Appl Maths Comput2019; 362: 124494. DOI: 10.1016/j.amc.2019.06.008
48.
DongWJFarrellJAPolycarpouMM, et al.Command filtered adaptive backstepping. IEEE Trans Control Syst Technol2012; 20(3): 566–580. DOI: 10.1109/TCST.2011.2121907
49.
FarrellJAPolycarpouMMSharmaM, et al.Command filtered backstepping. IEEE Trans Automatic Control2009; 54(6): 1391–1395. DOI: 10.1109/TAC.2009.2015562
50.
SuiSChenCLPTongS. Fuzzy adaptive finite-time control design for nontriangular stochastic nonlinear systems. IEEE Trans Fuzzy Syst2019; 27(1): 172–184. DOI: 10.1109/TFUZZ.2018.2882167
51.
HuangJWangQG. Decentralized adaptive control of interconnected nonlinear systems with unknown control directions, ISA Trans2018; 74: 60–66. DOI: 10.1016/j.isatra.2018.01.008
52.
DingZ. Adaptive consensus output regulation of a class of nonlinear systems with unknown high-frequency gain. Automatica2015; 51: 348–355. DOI: 10.1016/j.automatica.2014.10.079
LiYDChenBLinC, et al.Adaptive neural decentralized output-feedback control for nonlinear large-scale systems with input time-varying delay and saturation. Neurocomputing2021; 427: 212–224. DOI: 10.1016/j.neucom.2020.11.027
55.
HardyGHLittlewoodJEPolyaG, Inequalities. Cambridge:Cambridge University Press, 1952.
56.
QianCLinW. Non-Lipschitz continuous stabilizers for nonlinear systems with uncontrollable unstable linearization. Syst Control Lett2001; 42 (3): 185–200. DOI: 10.1016/s0167-6911(00)00089-x
57.
SiWDongXYangF. Decentralized adaptive neural control for high-order stochastic nonlinear strongly interconnected systems with unknown system dynamics. Inf Sci2018; 424: 137–158. DOI: 10.1016/j.ins.2017.09.071
58.
XiaXNZhangTPZhuJM, et al.Adaptive output feedback dynamic surface control of stochastic nonlinear systems with state and input unmodeled dynamics. Int J Adaptive Control Signal Process2015; 30(6): 864–887. DOI: 10.1002/acs.2644
59.
PolycarpouMM. Stable adaptive neural control scheme for nonlinear systems. IEEE Trans Automatic Control1996; 41(3): 447–451. DOI: 10.1109/9.486648
60.
XingLWenCLiuZ, et al.Event-triggered adaptive control for a class of uncertain nonlinear systems. IEEE Trans Automatic Control2017; 62(4): 2071–2076. DOI: 10.1109/TAC.2016.2594204
61.
YueHYWeiZChenQJ, et al.Dynamic surface control for a class of nonlinearly parameterized systems with input time delay using neural network. J Franklin Inst2020; 357(4): 1961–1986. DOI: 10.1016/j.jfranklin.2019.10.034
62.
WangFChenBSunYM, et al.Finite-time fuzzy control of stochastic nonlinear systems. IEEE Trans Cybernetics2019; 50: 1–10. DOI: 10.1109/tcyb.2019.2925573
63.
LiuYZhangHWangY, et al.Adaptive fuzzy prescribed finite-time tracking control for nonlinear system with unknown control directions. IEEE Trans Fuzzy Syst2021; 30: 1993–2003. DOI: 10.1109/tfuzz.2021.3072696