
Abstract
This paper investigates adaptive fuzzy finite-time output feedback fault-tolerant tracking control problem for multiple-input multiple-output (MIMO) stochastic non-strict feedback nonlinear systems with non-affine nonlinear faults and states unmeasured. Firstly, high-gain fuzzy state observers are constructed to overcome the state unmeasured problem in the system. Secondly, the mean-value theorem and input compensation techniques are employed to decouple non-affine nonlinear faults, and the resulting unknown control coefficients problem is handled using Nussbaum functions. In addition, dynamic surface control techniques and error compensation mechanisms are considered in the controller design, which effectively decreases the computational complexity of the control scheme. By combining the adaptive backstepping technique with finite-time control, a novel adaptive fuzzy dynamic surface finite-time output feedback fault-tolerant tracking control algorithm is proposed. The designed controller guarantees that all signals in the stochastic systems are semi-global finite-time stable in probability (SGFSP) as well as the tracking errors can converge to a small neighborhood within the origin in finite-time. Finally, two simulation examples are introduced to verify the effectiveness of the suggested control strategy.
Keywords
Introduction
In recent years, the problem of controller design for nonlinear systems received extensive attention and achieved fruitful results,1–6 among which the adaptive backstepping technique gradually stands out due to its unique superiority in controller design. Recently, fuzzy logic systems (FLSs) and neural networks (NNs) attracted the attention of scholars for their powerful approximation ability of nonlinear unknown functions, and scholars combined them with adaptive backstepping techniques to design a series of new adaptive fuzzy or NN control strategies for nonlinear systems.7–10 Among them, Xiao et al. 7 designed fuzzy adaptive tracking control for pure feedback systems with unknown dead zones and full state constraints. Shi et al. 8 proposed a dynamic surface-based fuzzy adaptive robust asymptotic tracking control scheme for nonlinear systems with unknown control directions. In literature, 9 Cui et al. designed fuzzy adaptive tracking control algorithms for MIMO switching nonlinear systems, and in literature, 10 Sui et al. investigated the problem of prescribed performance fuzzy adaptive finite-time output feedback control for MIMO nonlinear systems. However, the above control approaches do not apply to more general non-strict feedback nonlinear systems (NSFNSs). For this reason, in the literature, 11 the variable separation technique was used to solve the adaptive control design problem for NSFNSs. It is worth noting that the nonlinear functions 11 are restricted to monotonically increasing functions, which are certainly a strict condition. Subsequently, in literatures,12,13 the authors cleverly removed the restriction of monotonically increasing nonlinear functions by using the properties of the FLS/NN, and designed a new fuzzy adaptive fixed-time tracking control strategy and a novel adaptive NN tracking control strategy for NSFNSs, respectively. On this basis, Li et al. 14 investigated the observer-based fuzzy adaptive finite-time dynamic surface tracking control problem for MIMO nonlinear systems with non-lower triangular structure. Nevertheless, the control objects studied7–14 are all deterministic systems, which overlook the effects of stochastic disturbances.
Admittedly, many practical systems are usually accompanied by stochastic disturbances, which are the source of instability in control systems, and therefore, it is necessary to consider the influences of many stochastic disturbances such as external disturbances and modeling errors in controller design. For stochastic NSFNSs limited by other external disturbances, Pan et al. 15 developed an asymptotic tracking control scheme and implemented disturbance decay, which is the first application of the backstepping technique to the stochastic nonlinear systems. Wang et al. 16 designed event-triggered adaptive fuzzy tracking controller for stochastic pure feedback nonlinear systems, and the designed controller ensured that overall signals in the stochastic closed-loop systems are semi-globally uniformly and ultimately bounded in probability. In literatures,17,18 adaptive NN tracking control schemes were proposed for stochastic NSFNSs and switched stochastic NSFNSs, respectively, and the designed control schemes achieve that output signal of the systems asymptotically track to the desired signal. Compared to the asymptotic tracking,15–18 finite-time control received much attention because of its advantages of quicker response performance, higher robustness, and better control accuracy. Yin et al. 19 first introduced the concept of finite-time stability for stochastic nonlinear systems, and Min et al. 20 introduced the related stochastic Lyapunov function theorem and defined SGFSP. In the literature, 21 Sui et al. proposed a new adaptive fuzzy control scheme for MIMO stochastic NSFNSs based on finite-time stability, and the designed controller ensures that overall signals in the systems considered are SGFSP. However, one point should be emphasized that the control elements of the control systems in the above control results are fault-free.
In many practical systems, control elements often occurred faults, which often lead to the instability of control systems. Therefore, how to design suitable control strategies for nonlinear systems with faults become important and many results have been achieved.22–28 Among them, Liu et al. 22 first investigated adaptive neural finite-time FLC problem for switched nonlinear systems with bias and loss of effectiveness faults in the actuators. Zhang et al. 23 employed the Nussbaum function to address the loss of effectiveness faults in the actuators and proposed an event-triggered adaptive output feedback control strategy for switched large-scale nonlinear systems. In literatures,24–27 fuzzy adaptive fault-tolerant tracking control, adaptive NN output feedback fault-tolerant tracking control, fuzzy adaptive nonsingular fixed-time fault-tolerant tracking control, and finite-time adaptive NN fault-tolerant tracking control were studied for nonlinear systems, respectively, and the systems considered24–27 were limited to lock-up and the loss of effectiveness faults in the actuators. Furthermore, Xiong et al. 28 had designed the adaptive output feedback FTC strategy for nonlinear systems with sensor faults. However, the above FLC schemes are not effective for nonlinear systems with non-affine nonlinear faults. In the literature, 29 Li et al. employed the Butterworth low-pass filter to deal with the non-affine nonlinear fault problem and designed an adaptive fuzzy output feedback FLC scheme for nonlinear systems. Subsequently, this treatment approach was widely utilized. Dong et al. 30 proposed a prescribed performance fuzzy output feedback FLC strategy for multiagent systems with non-affine nonlinear faults, and Shao et al. 31 designed a fuzzy adaptive fixed-time FLC scheme for nonlinear interconnected systems with non-affine nonlinear faults. In literatures,32,33 the fuzzy adaptive output-constrained FLC problem and the adaptive fuzzy optimal FLC problem were investigated separately for stochastic nonlinear systems with non-affine nonlinear faults. It is worth noting that none of the above FTC strategies29–33 consider finite-time control. To the best of the authors’ knowledge, the adaptive fuzzy finite-time FTC problem for MIMO stochastic nonlinear systems with non-affine nonlinear faults and non-lower triangular structure is rarely investigated in existing results, which is one of the motivations of this paper. In addition, the treatment method that uses the Butterworth low-pass filter for non-affine nonlinear faults in Refs. [29–33] has certain limitations, therefore, how to eliminate the limitations in Refs. [29–33] and to design a new treatment method, is another motivation of this paper. Moreover, the consideration of MIMO stochastic NSFNSs makes controller design more challenging.
In addition, actual systems are often subject to special environmental and other factors, which cause the states of the control system to be unmeasured. Therefore, output feedback control needs to be taken into account in controller design. By constructing the state observer, Chen et al. 34 designed an adaptive output feedback tracking control algorithm for NSFNSs. In the literature, 35 Tong et al. constructed the fuzzy state observer to design an adaptive fuzzy output feedback tracking control strategy for NSFNSs with unmeasured states. The adaptive fuzzy finite-time output feedback controller design problem for MIMO nonlinear systems was addressed in Ref.[36]. Sun et al. 37 proposed an adaptive NN output feedback control scheme for stochastic nonlinear systems with states unmeasured, and Li et al. 38 presented a fuzzy adaptive output feedback control strategy for stochastic MIMO nonlinear systems with unknown control coefficients and unknown dead zones. In the literature, 39 Zhang et al. constructed a high-gain fuzzy state observer as a special structure to overcome the problem that the system is not being processed by the fuzzy function, and designed a finite-time adaptive fuzzy output feedback FLC algorithm for NSFNSs with actuator faults. Furthermore, the problem of “complexity explosion” is also frequently encountered during the traditional controller design process. In the literature, 40 the dynamic surface control (DSC) technology was used to address the problem, which introduces the first-order filter in the backstepping design process. However, more errors will be produced when the order of the system is increased. To tackle this problem, the corresponding error compensation system is constructed 41 to address the influence of the error generated with the DSC.
Based on the above discussion, this paper aims to design adaptive fuzzy dynamic surface finite-time FTC strategies for MIMO stochastic NSFNSs with non-affine nonlinear faults and state unmeasured. In the process of designing the controller, the FLS is used to deal with the unknown nonlinear functions in the system. On this basis, the high-gain fuzzy state observers are constructed. Combining the finite-time control, the backstepping technique, and Nussbaum functions, and employing DSC techniques and the error compensation mechanism, an observer-based adaptive fuzzy dynamic surface finite-time FTC scheme is proposed. In contrast to the existing results, the main characteristics and advantages of this paper are as follows:
1) Compared to stochastic nonlinear systems,17–20 MIMO nonlinear systems,9,10,16 and NSFNSs,11–13,34 MIMO stochastic NSFNSs are considered, which means that the controller designs more challenging due to simultaneously considering non-strict structure and stochastic disturbance.
2) Distinct from the linear fault problem considered,22–28 the system in this paper is subject to more complex non-affine nonlinear faults. Inspired by work in literature, 42 the mean-value theorem and the compensation techniques are employed to deal with the non-affine nonlinear fault problem, and the resulting unknown control coefficients are handled using Nussbaum functions. In contrast to29–33,43 using Butterworth low-pass filters to overcome the above-mentioned issue, this paper directly decouples the non-affine nonlinear faults, which removes the limitation,29–33,43 such as the high-frequency and low-pass properties, and the boundedness for functions.
3) Different from the adaptive fuzzy FTC approaches,23,25,26,28–33 the finite-time control theory is considered in the adaptive fuzzy FTC design algorithm of this paper, which the controller designed in this article not only has better tracking performance but also ensures that all signals in the stochastic systems are SGFSP. In addition, the DSC technique and error compensation mechanisms are incorporated into the process of designing the controller, which effectively eliminates the issue of “explosion of complexity,”22–33 and optimizes the control algorithm.
Problem formulation and Preliminaries
Problem formulations
Consider the following MIMO stochastic NSFNSs with non-affine nonlinear faults




Substituting (4) into (1), one gets

The control objective in this study is to propose an adaptive fuzzy dynamic surface finite-time output feedback FTC algorithm for the MIMO stochastic NSFNSs (1) with non-affine nonlinear fault and unmeasurable states such that (i) Overall signals within the closed-loop MIMO systems are SGFSP; (ii) Output signals of the system y
i
can track given signals yi,d in the mean square sense within finite-time.
Preliminaries
Stochastic finite time stability
The following stochastic system is given







Nussbaum-type function


Fuzzy logic systems

Adaptive fuzzy finite time output feedback fault-tolerant control design
This section will design fuzzy state observers with high gain, and by using the adaptive backstepping technique, an adaptive fuzzy dynamic surface finite-time output feedback FTC strategy will be designed.
High gain fuzzy state observers design
According to Lemma 6, the functions

Therefore, equation (5) can be rewritten as follows


For the system (18), the high-gain fuzzy state observer is designed as follows



The coordinate transformations are defined as follows

Then, (21) can be written as



The Lyapunov function candidate is chosen as

Combining (26) and (27), one has

By employing Lemma 4 and

Adaptive fuzzy dynamic surface finite-time output-feedback fault-tolerant control design
This section will design the adaptive fuzzy dynamic surface finite-time output feedback FTC scheme by using the backstepping technique and the high-gain fuzzy state observer described before.
The tracking error variable is defined as


Meantime, the following compensation function qi,j, j = 1, …, n
i
is depicted to disposal of the error caused by filter αi,j−1 − xi,j,d, which has an impact on the stability of the system


The detailed process of designing the controllers is shown in the following
Step1: According to vi,1 = zi,1 − qi,1 and zi,1 = xi,1 − xi,d, one gets

The Lyapunov function candidate is selected as


Substituting

By utilizing Lemma 4 and
Substituting (39) into (38), one has
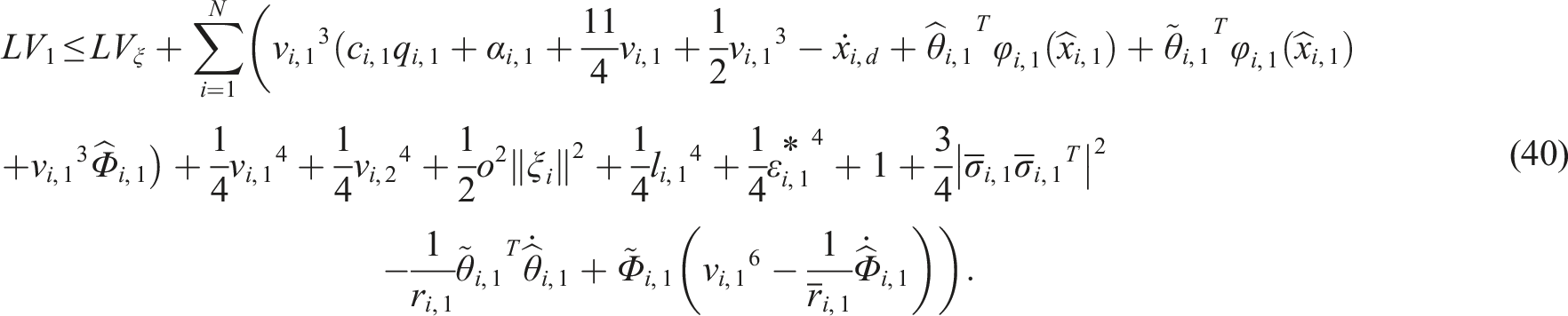
The virtual controller αi,1 and adaptive law




Substituting LV
ξ
into (44), we can get

Step j(2 ≤ j ≤ n
i
− 1): From vi,j = zi,j − qi,j, and

The Lyapunov function candidate is chosen as



By utilizing Lemma 4 and
Substituting (50) into (49), one can yield that

The virtual controller αi,j and adaptive law




Substituting LVj−1 into (55), one gets

Stepn
i
: Considering

The Lyapunov function candidate is selected as

Then, the time derivative of V is obtained as

Letting γ
i
= α
i
(t − T0)a
i
+ 1, and substituting

By utilizing Lemma 4 and

Substituting (61) into (60), one can yield that

The controller



Substituting (63)–(65) into (62), one has

Substituting

The block diagram of adaptive fuzzy dynamic surface finite-time output feedback FTC algorithm.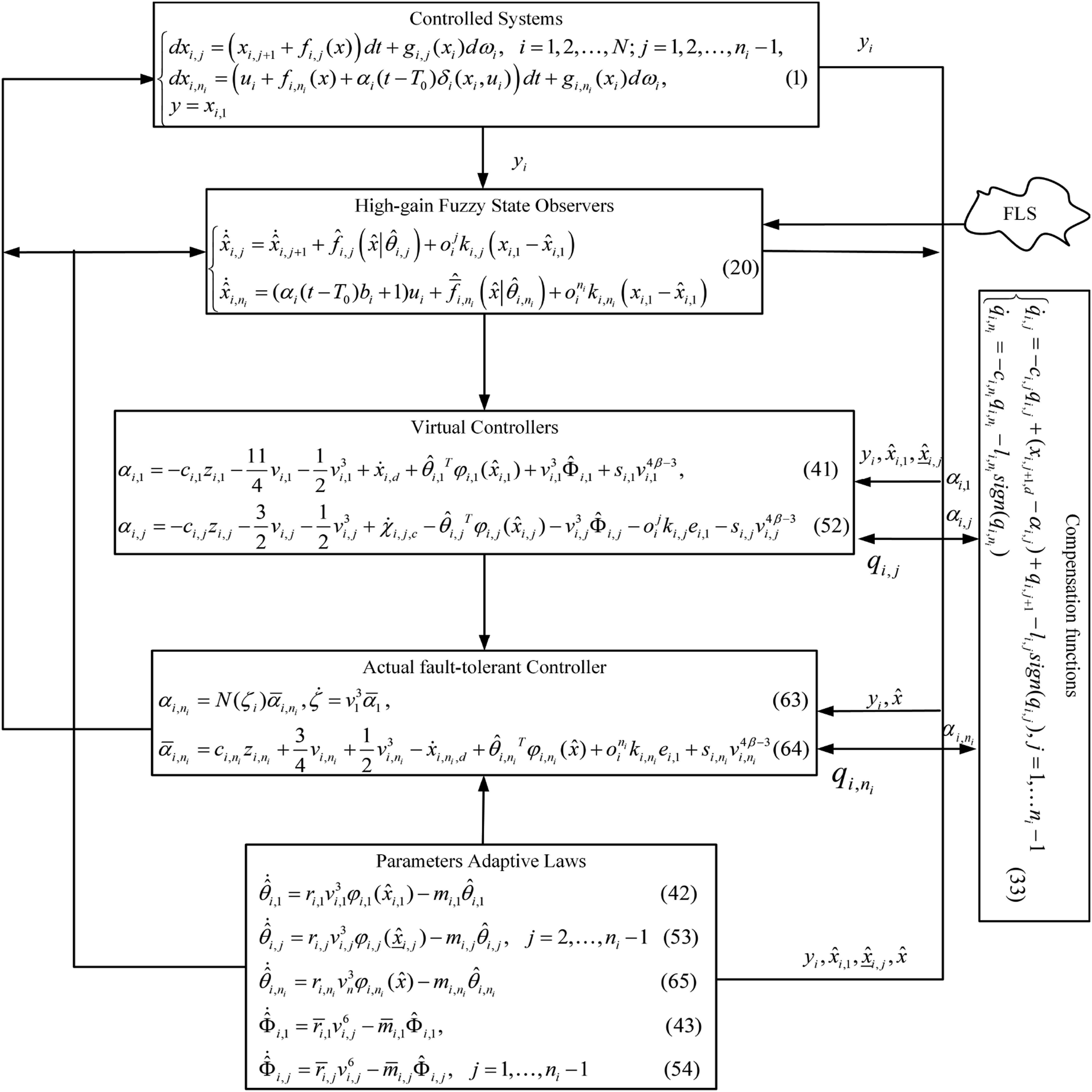
Stability analysis
Theorem 1. Consider the MIMO stochastic NSFNSs (1) with non-affine nonlinear faults and unmeasured states under assumption 1. The fuzzy state observer with high gain is established by (20), the adaptive fuzzy dynamic surface finite-time output feedback FTC algorithm consists of virtual controllers (41), (52), and the actual controller (64), and the parameter adaptive laws (42), (43), (53), (54), and (65) can ensure that overall signals with the studied system (1) are SGFSP, and the tracking errors of the controller developed in this study can coverage to a small neighborhood around the origin within finite-time.
Proof: Combining the definition of θ, the following inequality holds

According to Lemma 3, by choosing

Substituting (68) and (69) into (67), one has

According to the above analysis, and defining

Then, one gets

Multiplying both sides of (72) by e
at
at the same time and integrating it over [0,t] yields

From (73), and using Lemma 5, it follows that

Therefore, equation (71) can be written as

From Lemma 1 and (75), it is easy to know that the system (1) is SGFSP. By choosing 0 < τ < 1, V will converge to the set

By defining ϵ = {C/(1 − τ)b}1/β, the following inequality can be obtained


The following proves the above additional compensating function qi,j can coverage in finite-time T1. The Lyapunov function is chosen as

Moreover, it can deduce that

Substituting (80) into (79), one has

By choosing the appropriate parameter to make li,j ≥ ηi,j hold, it can be obtained that

From (77), (78), and (82), the
The proof is completed.
Simulation
In this section, two simulation examples are presented to verify the effectiveness of the proposed adaptive fuzzy dynamic surface finite-time output feedback FTC strategy.
Example 1: Consider the MIMO stochastic NSFNSs with non-affine nonlinear faults as follows


The fuzzy state observer is designed as

In the simulation experiment, the compensating signal can be designed as follows

In addition, the virtual controllers α
i
and adaptive law θ
i
, Φ1 are designed as follows

In this simulation, the
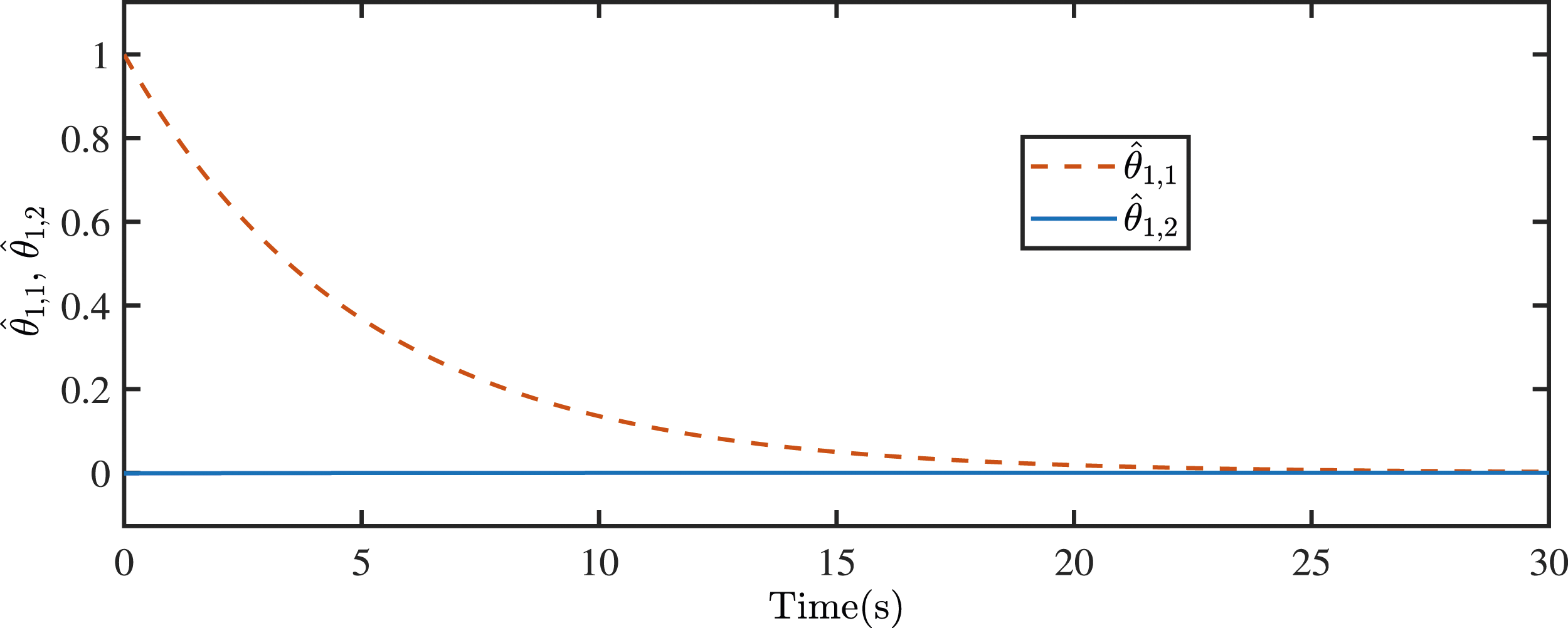
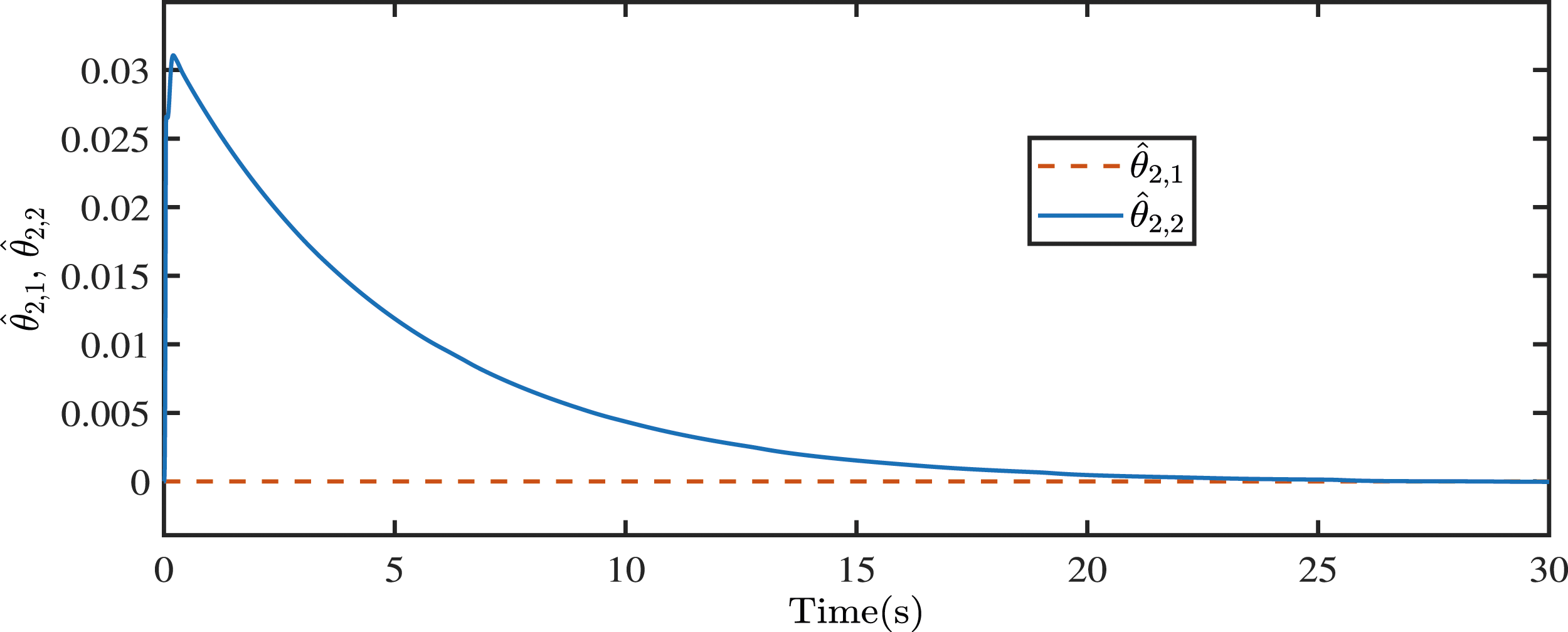
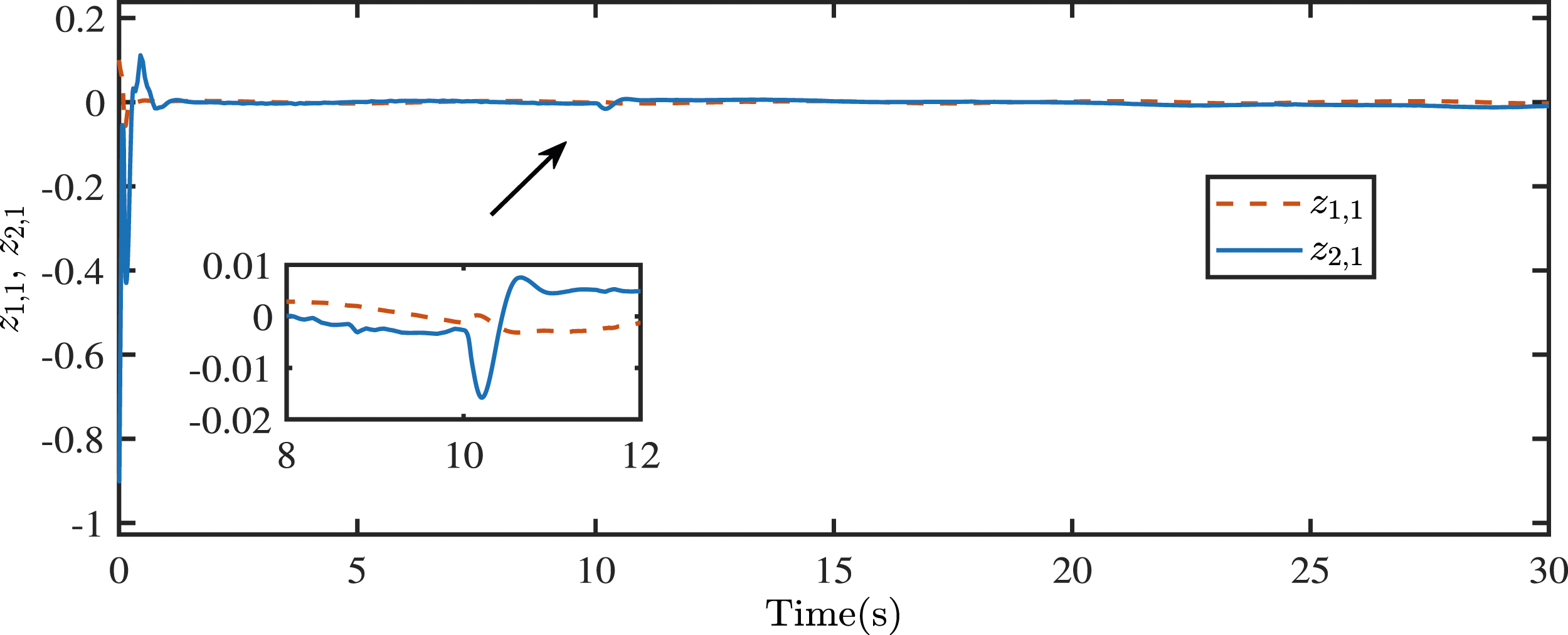
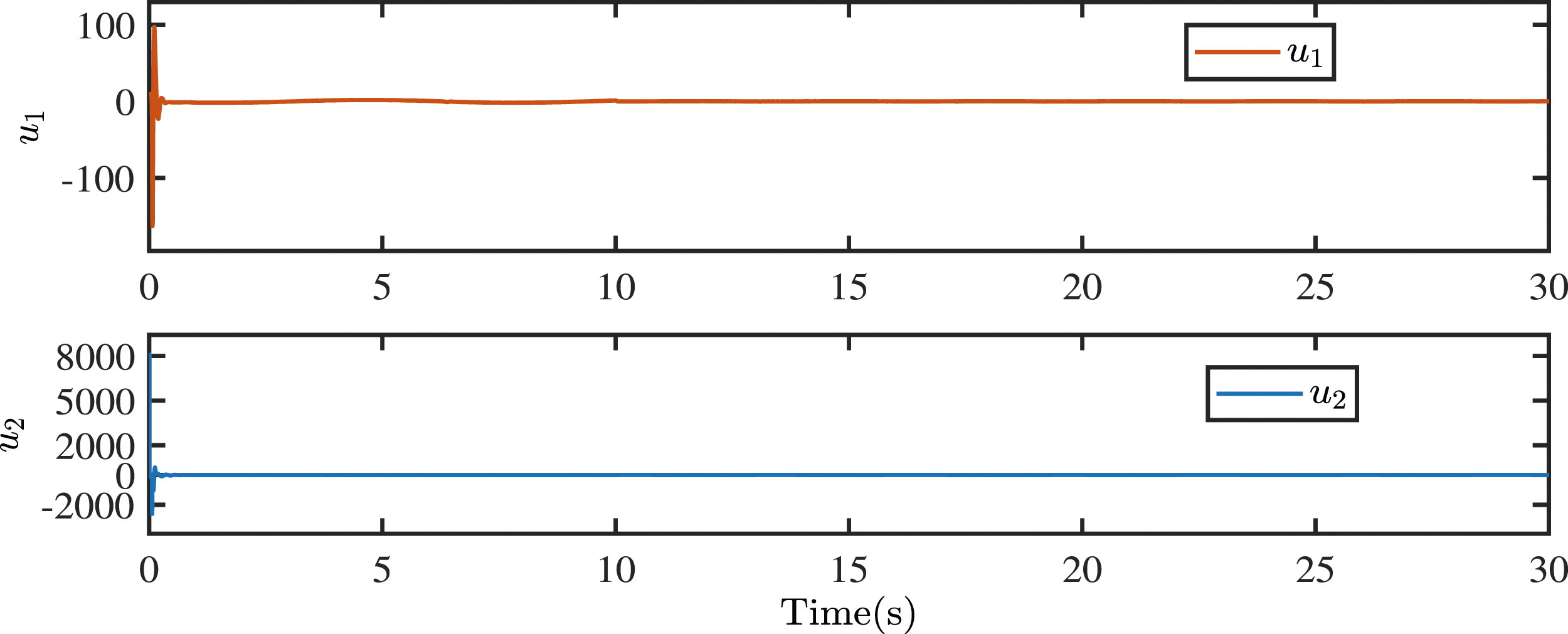
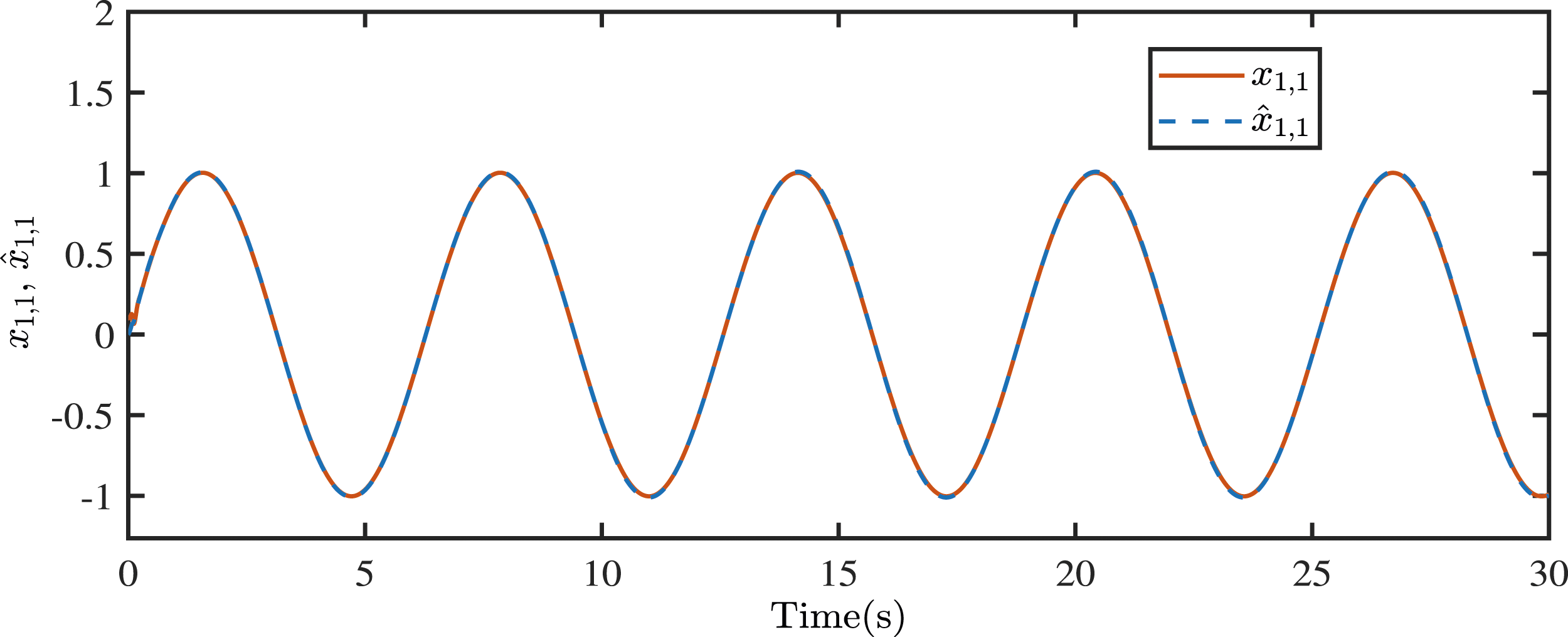
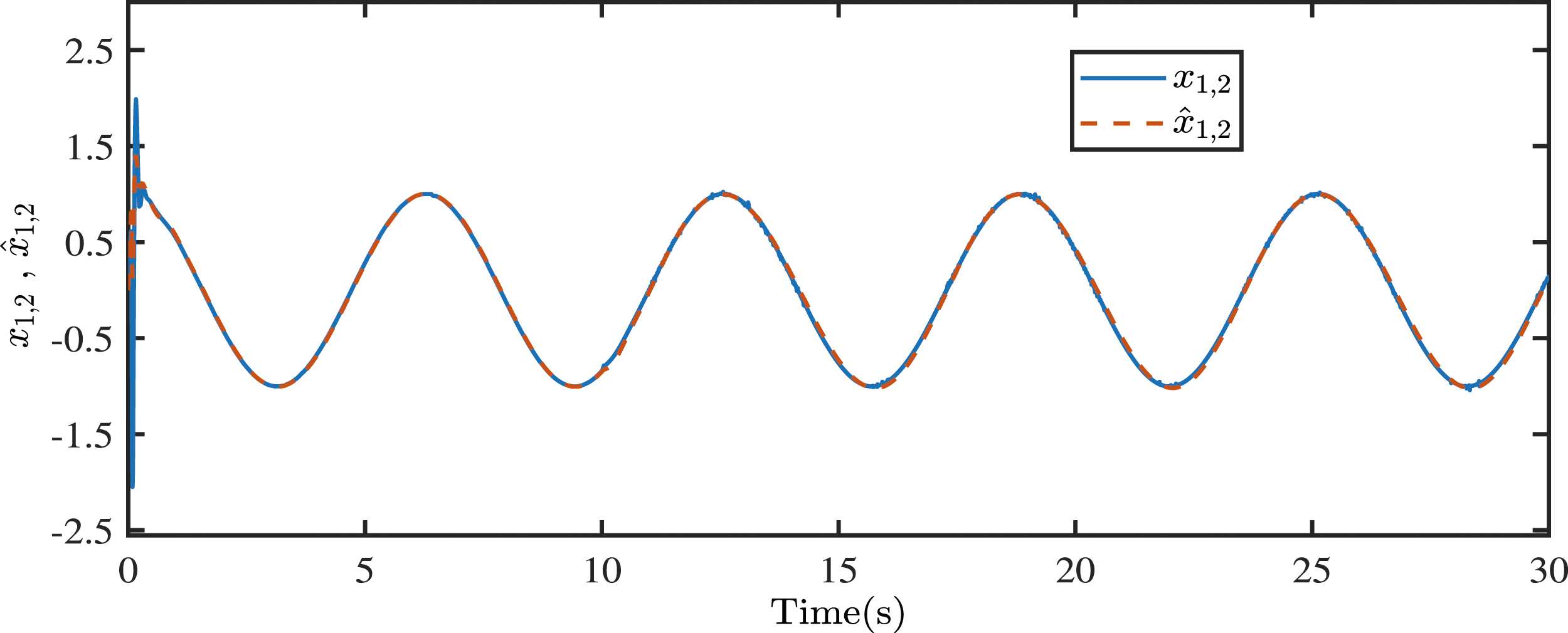
The simulation results are depicted in Figures 2–15. Figure 2 shows the system output x1,1 and the given signal y1,d. Figure 3 shows the system output x2,1 and the given signal y2,d. Figure 4 shows the tracking errors z1,1 and z2,1. Figure 5 shows the controllers u1 and u2. Figure 6 shows the system state x1,1 and the system state estimate The system output x1,1 and the given signal y1,d (Example 1). The system output x2,1 and the given signal y2,d (Example 1). The tracking error z1,1 and z2,1 (Example 1). The controllers u1 and u2 (Example 1). The system state x1,1 and the system state estimate The system state x1,2 and the system state estimate The system state x2,1 and the system state estimate The system state x2,2 and the system state estimate The ζ1 and N(ζ1) (Example 1). The ζ2 and N(ζ2) (Example 1). The adaptive parameters The adaptive parameters The system output x1,1 and given signal y1,d without the FTC technology (Example 1). The system output x2,1 and given signal y2,d without the FTC technology (Example 1).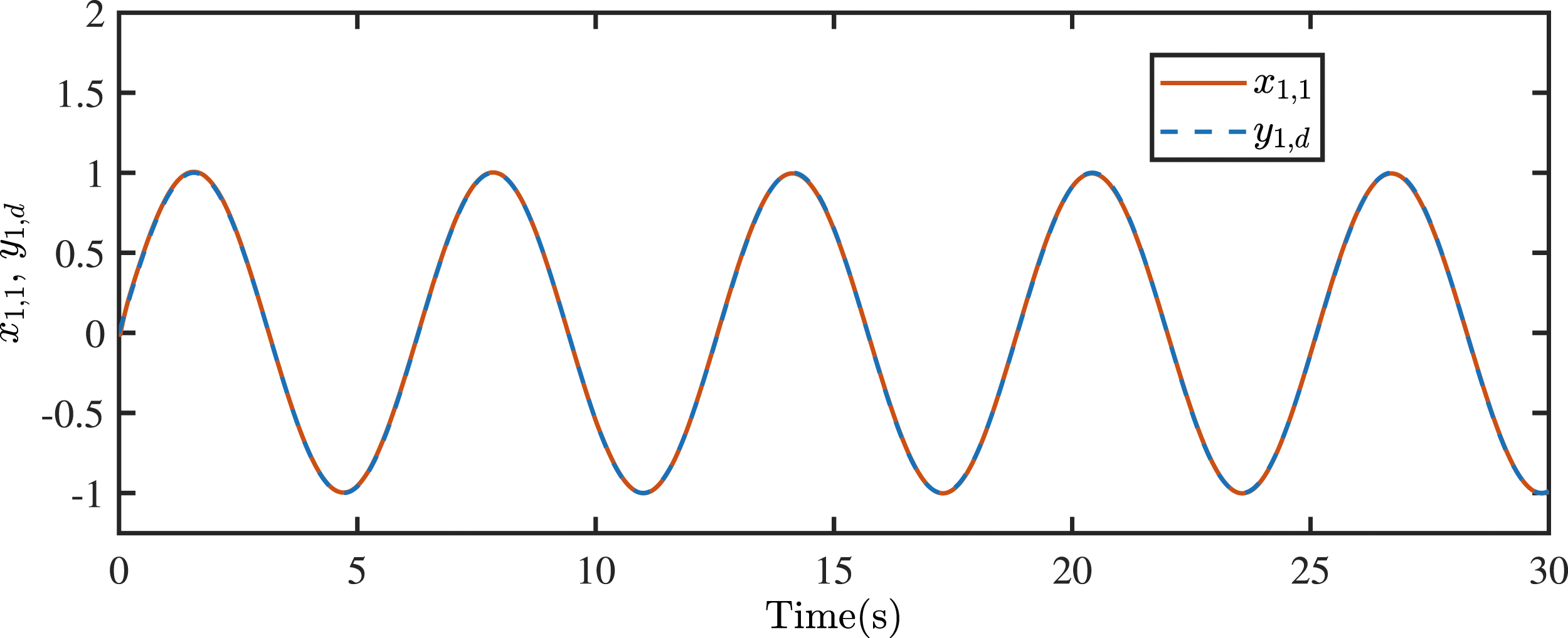
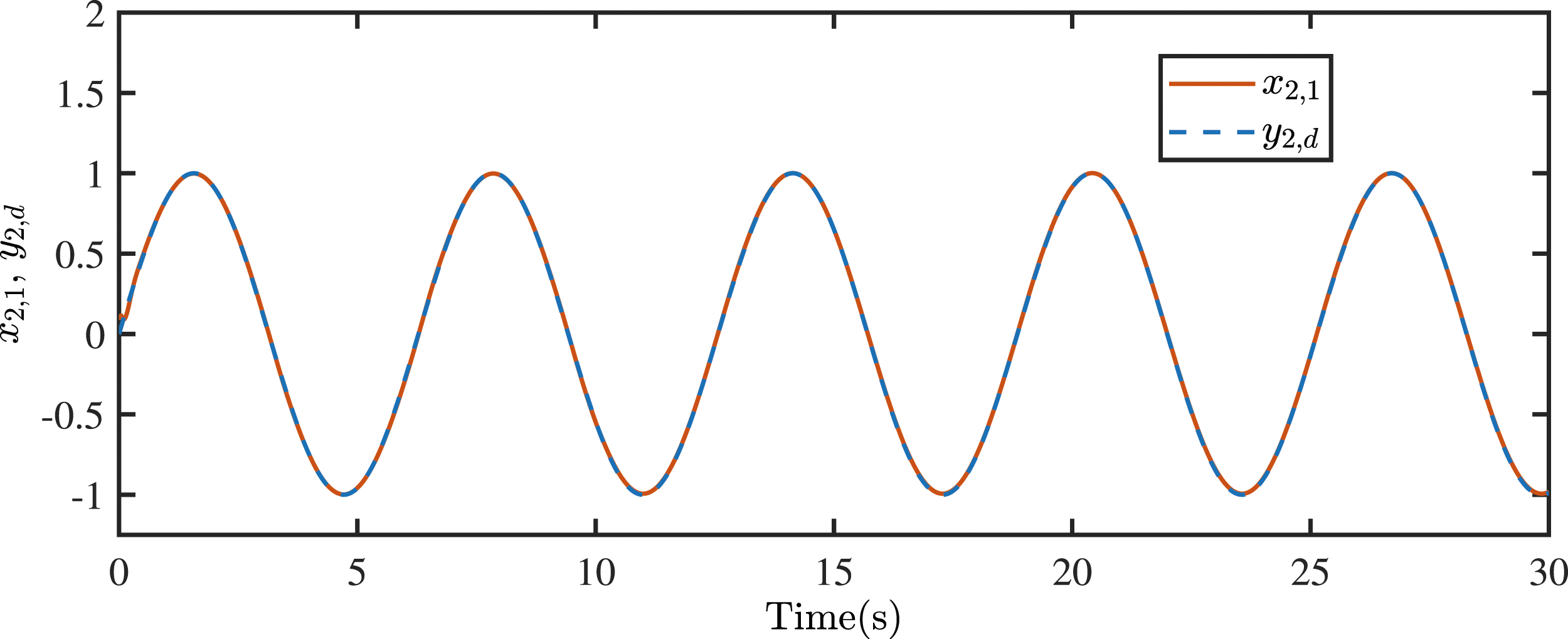
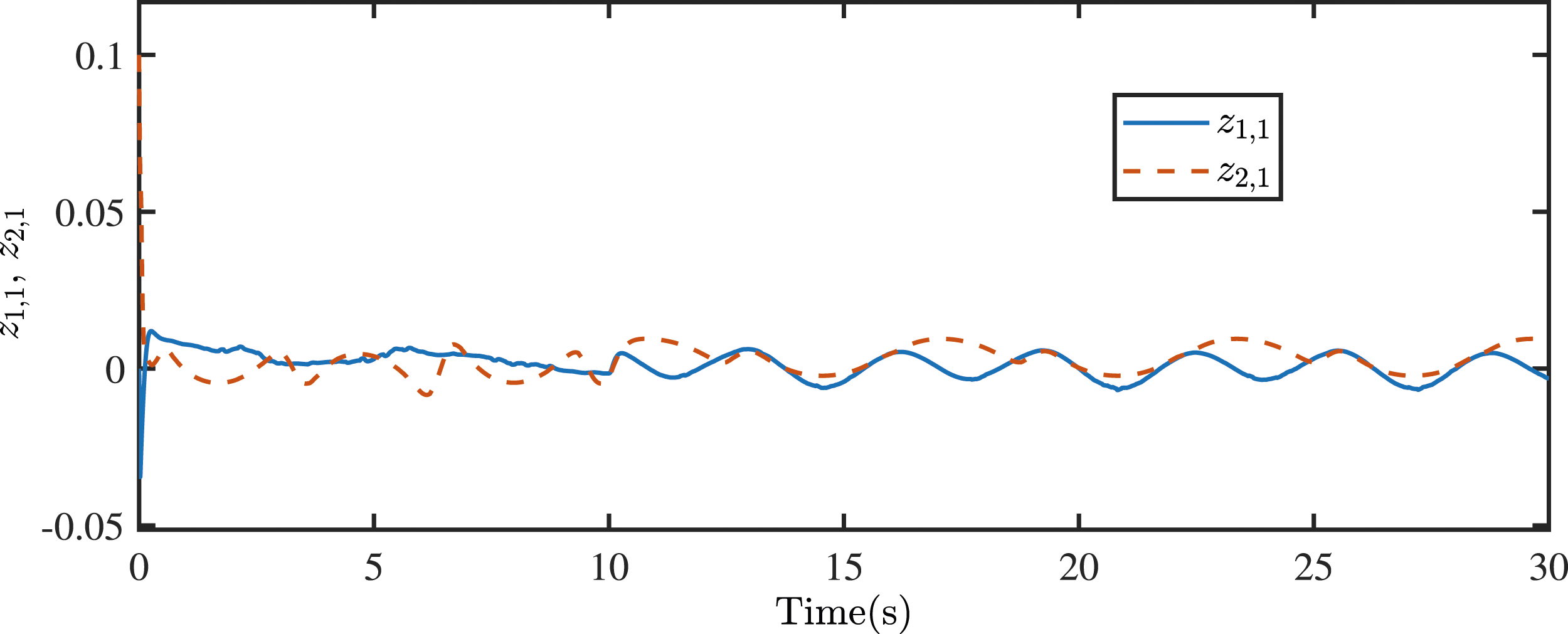
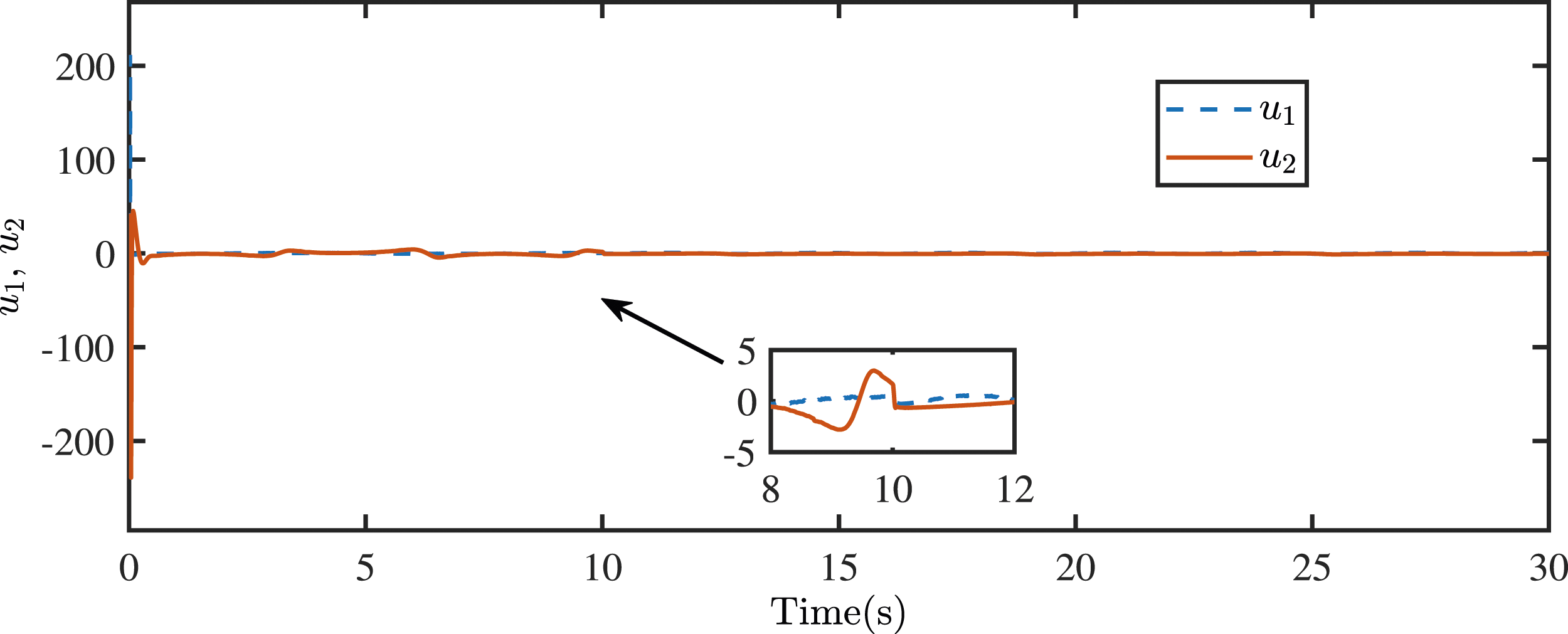
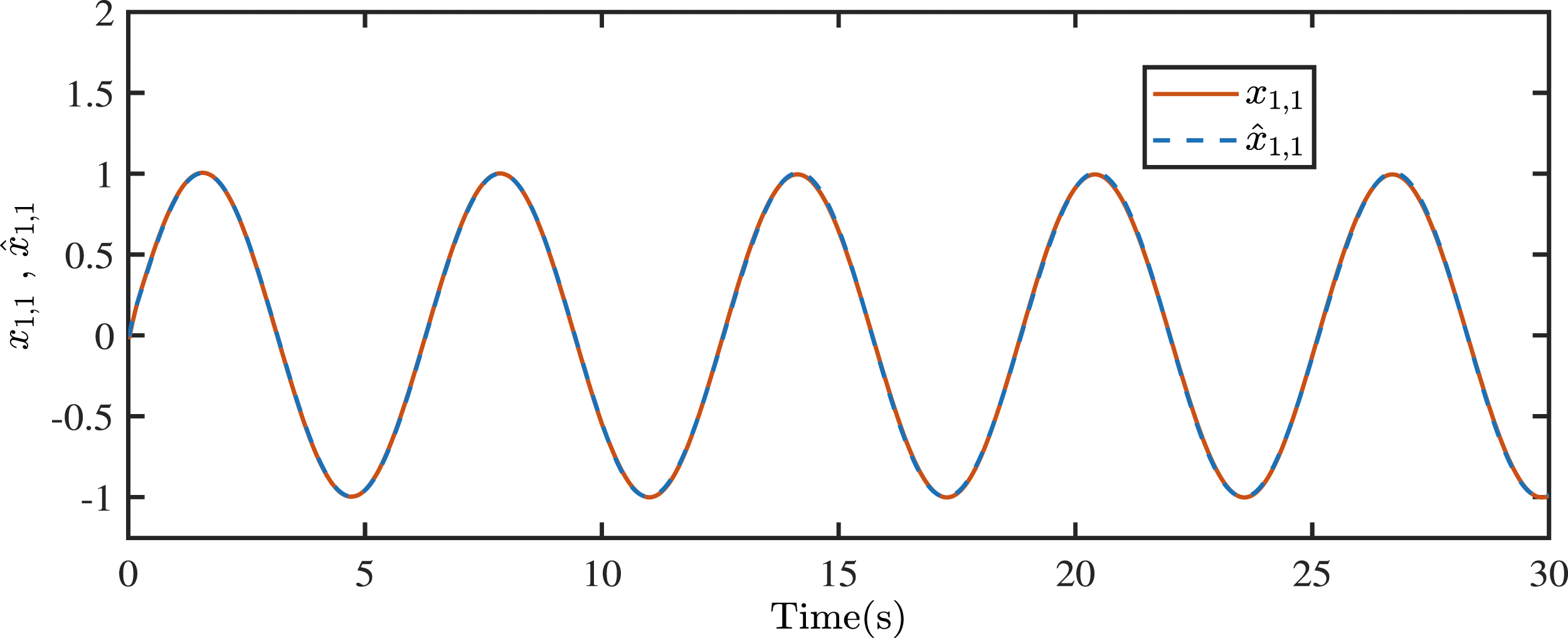
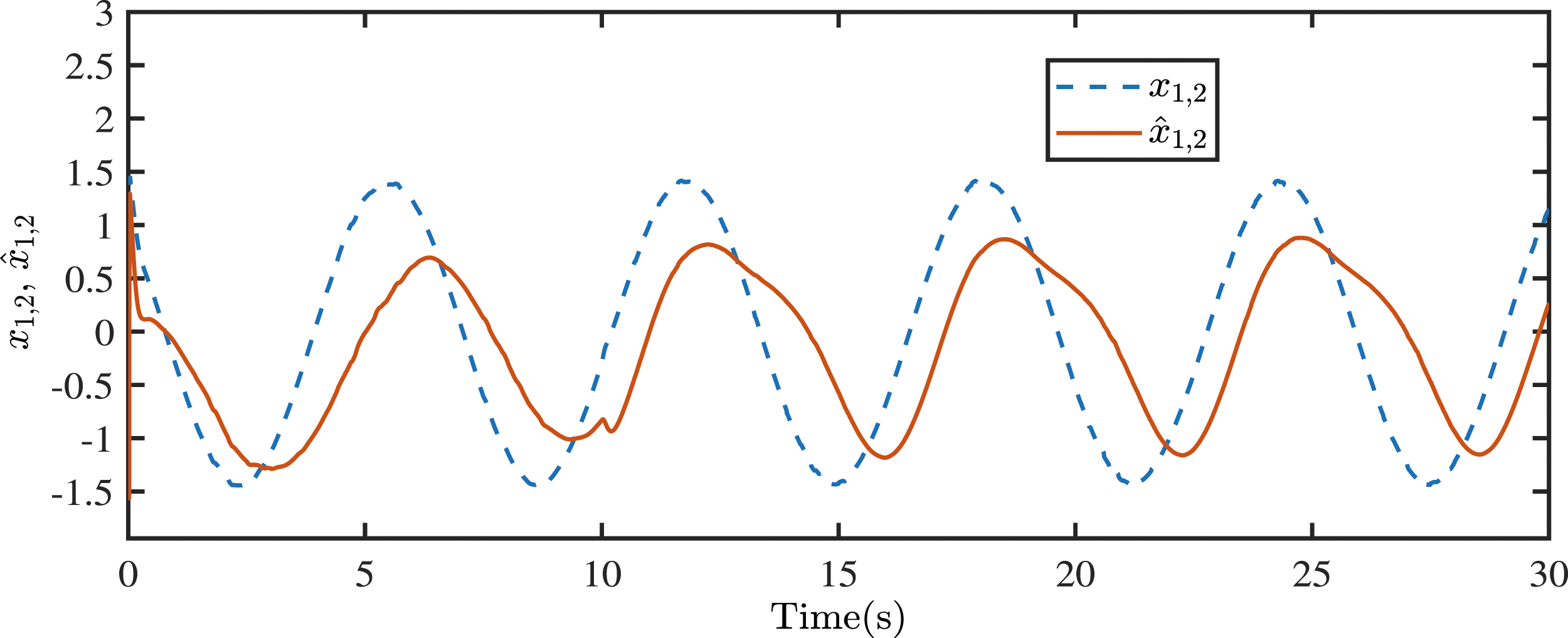
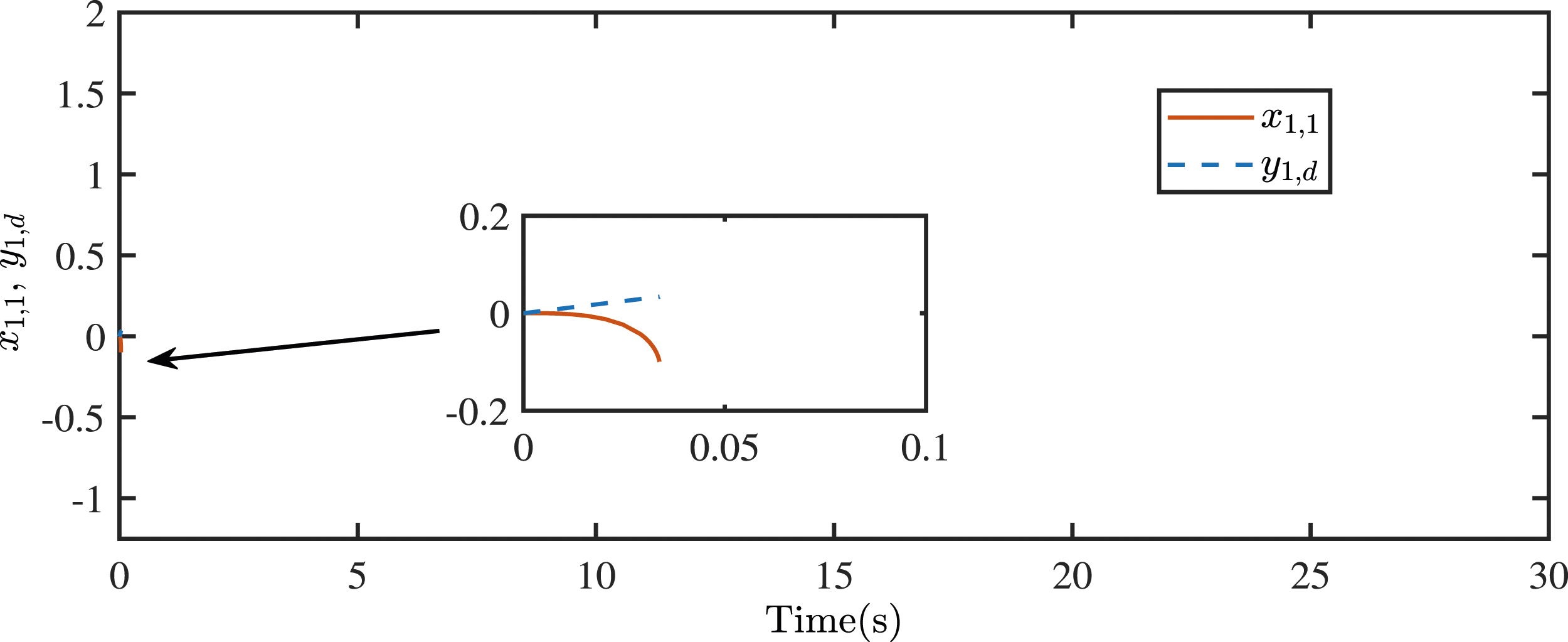
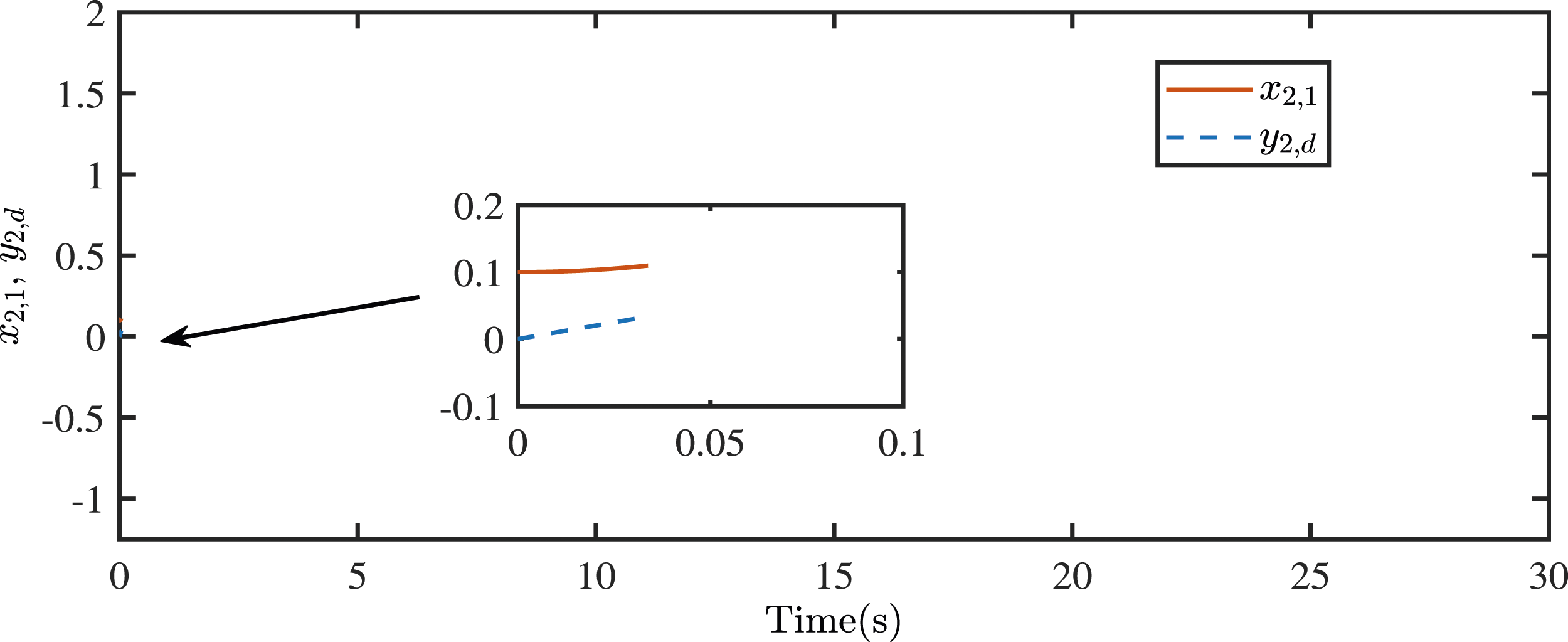
The results in Figures 2–13 show that the controller designed in this paper can ensure that the overall signals with the system (83) is SGFSP and the tracking errors of the study controller can converge in a small neighborhood around the origin within finite-time. It is obvious from Figures 14 and 15 that the control system without the FTC technique proposed is unstable.
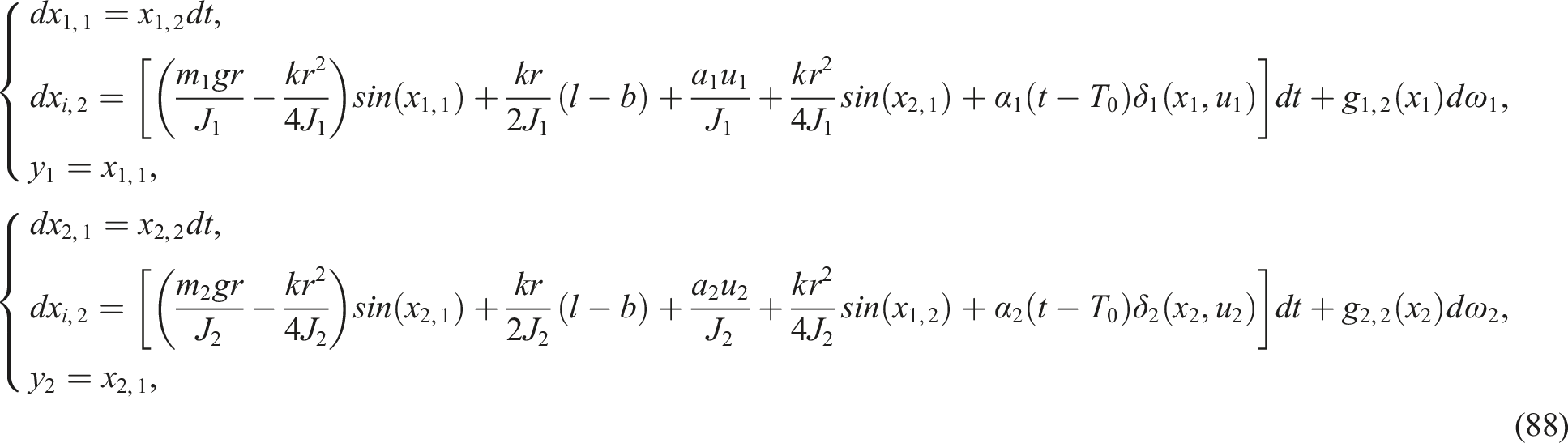
Example 2: Consider the system of two inverted pendulums connected by springs in Ref. [52] which is depicted in Figure 16, when the system is subjected to non-affine nonlinear faults, the actual system in Ref.[52] can be rewritten as follows Two inverted pendulums connected by springs.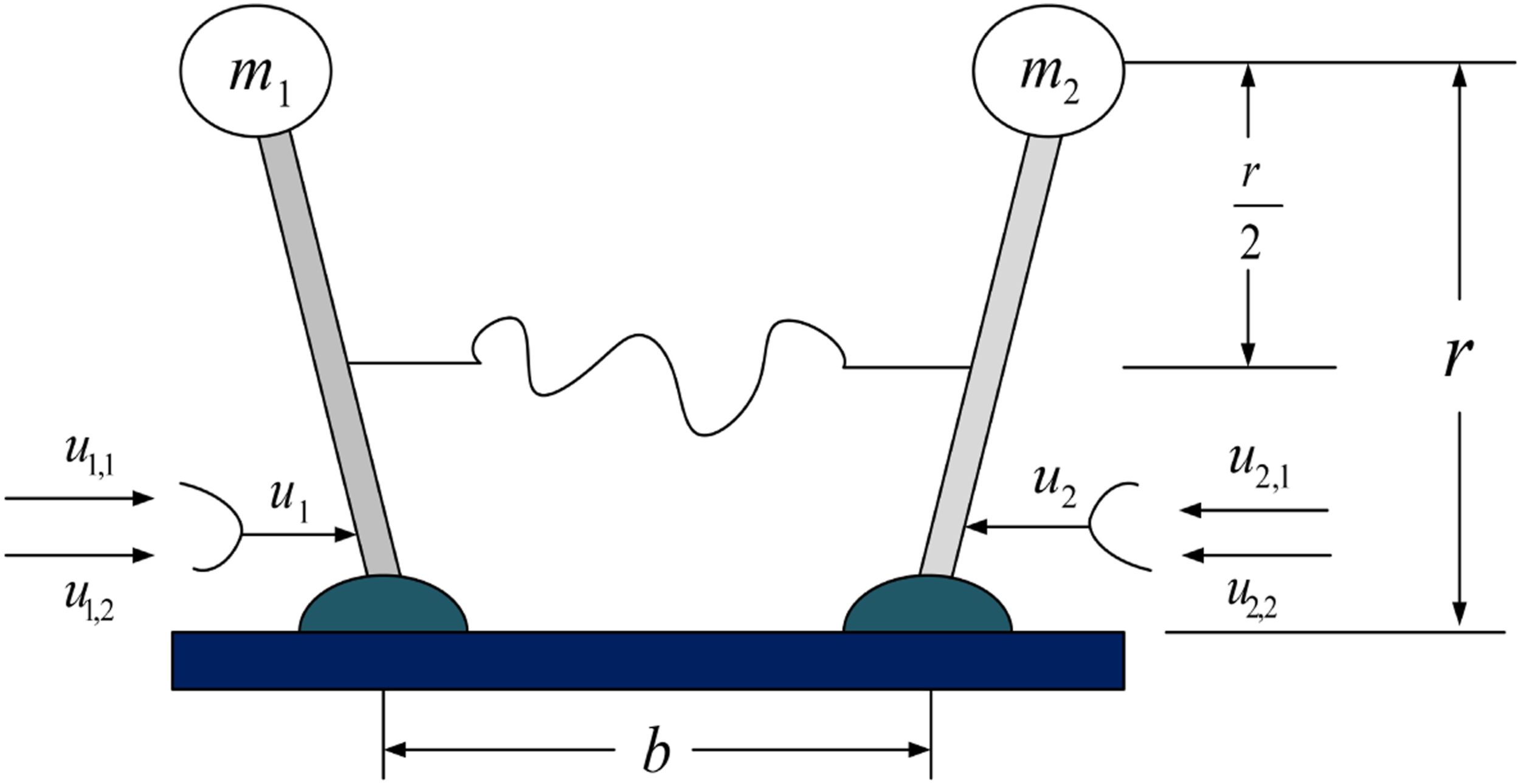

The fuzzy state observer is designed as

It is noting that xi,1 are linear differential equations. Then, the virtual control αi,1 is described as
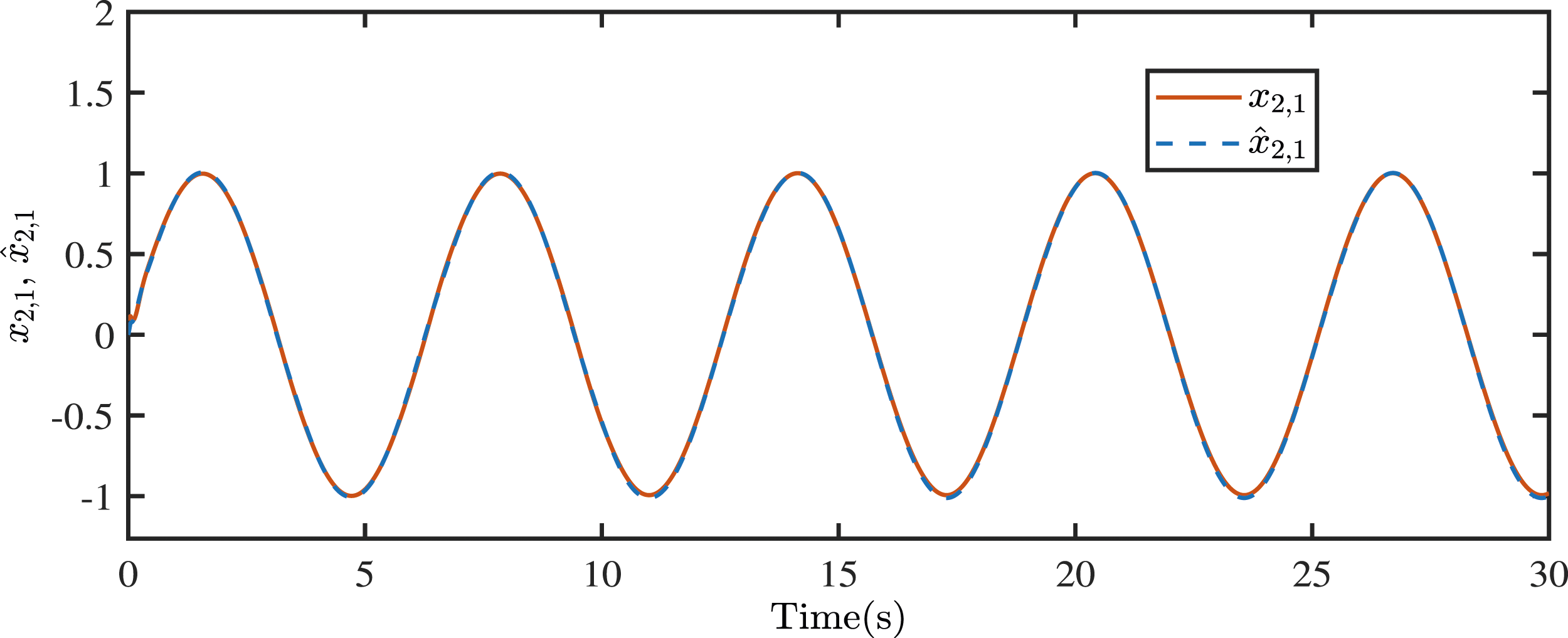
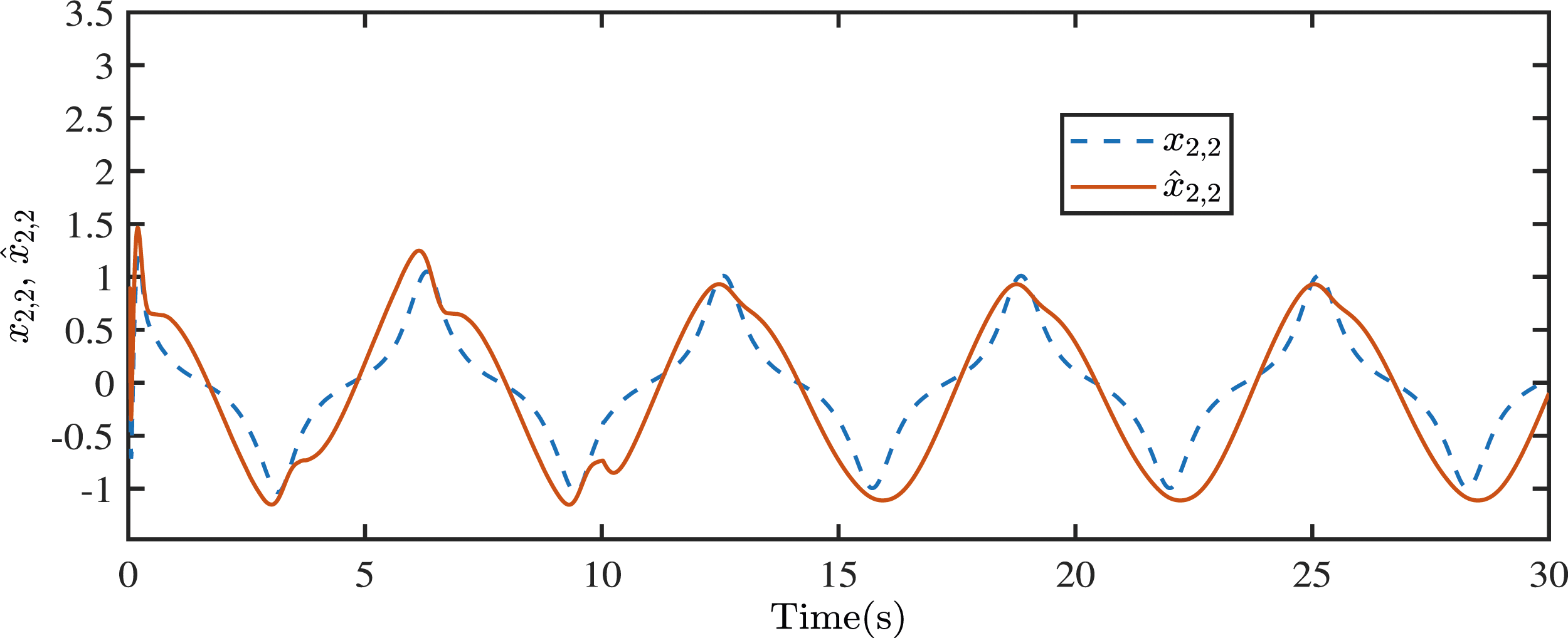
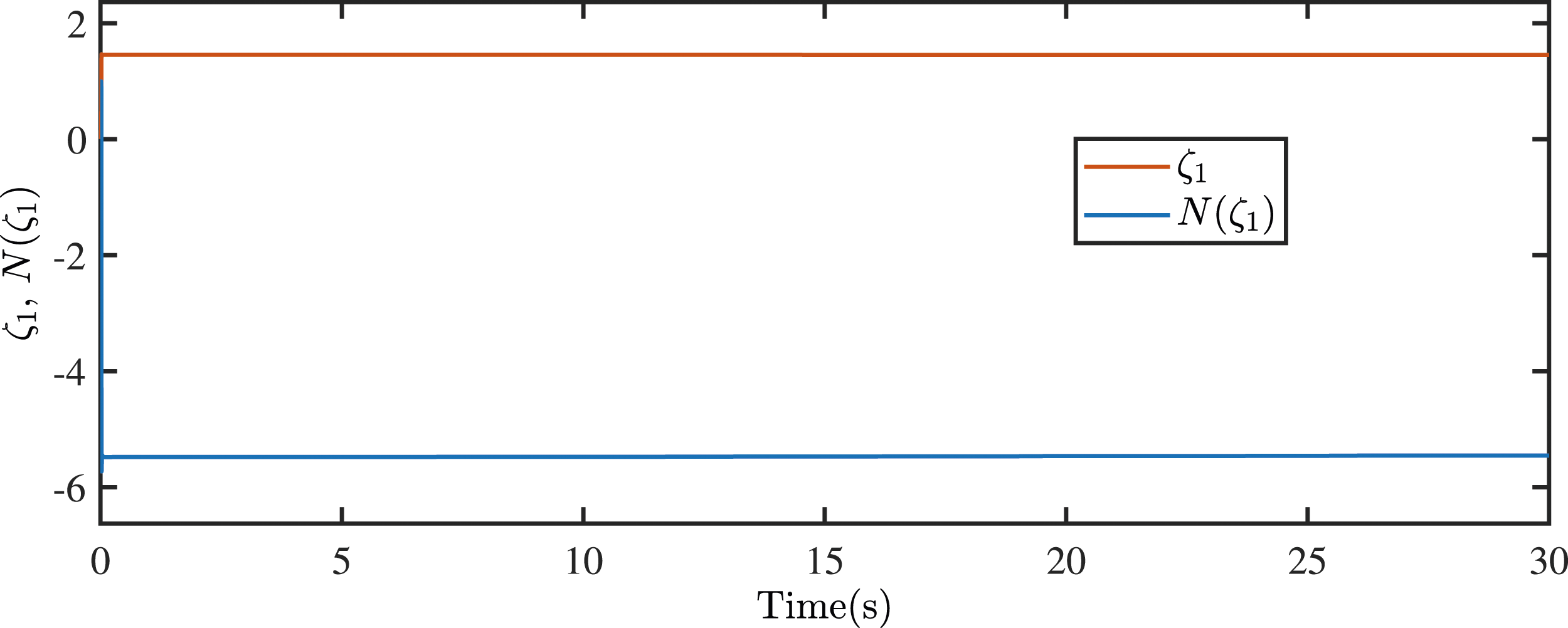
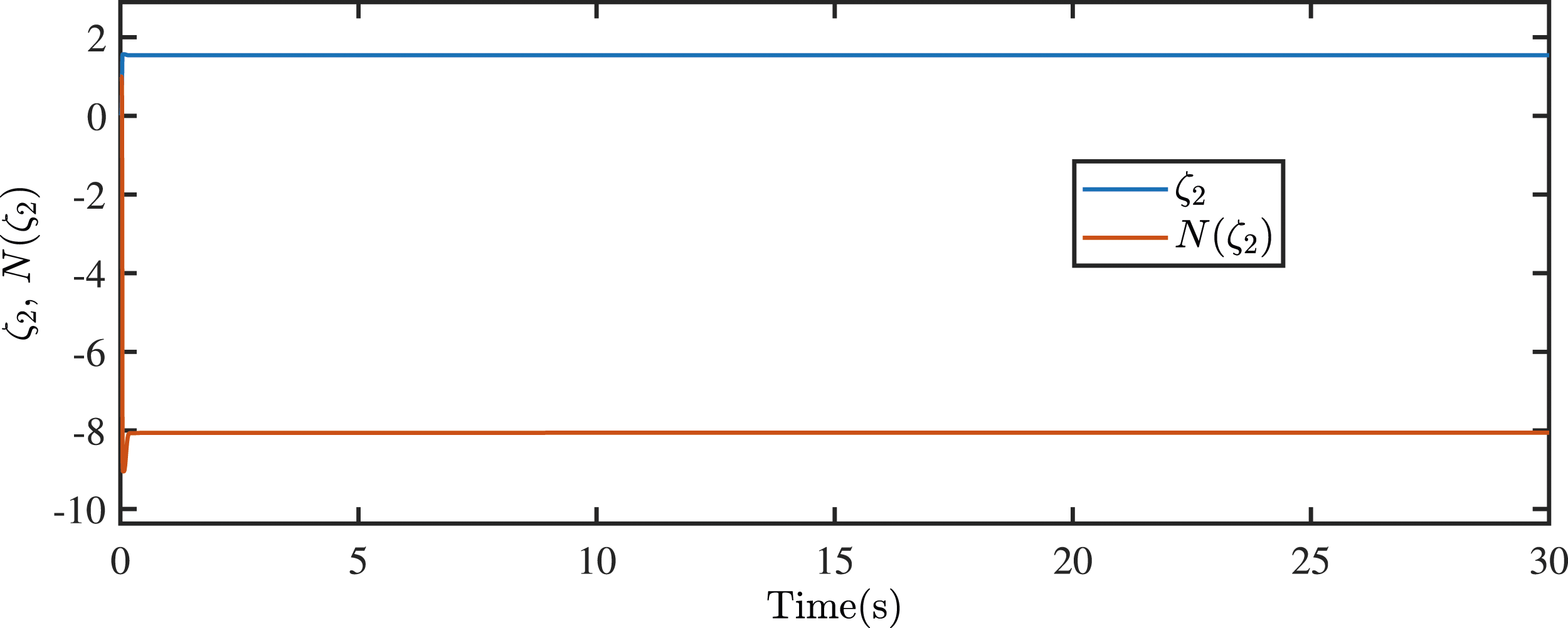
The simulation results are depicted in Figures 17–30. Figure 17 shows the system output x1,1 and the given signal y1,d. Figure 18 shows the system output x2,1 and the given signal y2,d. Figure 19 shows the tracking errors z1,1 and z2,1. Figure 20 shows the controllers u1 and u2. Figure 21 shows the system state x1,1 and the system state estimate The system output x1,1 and the given signal y1,d (Example 2). The system output x2,1 and the given signal y2,d (Example 2). The tracking error z1,1 and z2,1 (Example 2). The controllers u1 and u2 (Example 2). The system state x1,1 and the system state estimate The system state x1,2 and the system state estimate The system state x2,1 and the system state estimate The system state x2,2 and the system state estimate The ζ1 and N(ζ1) (Example 2). The ζ2 and N(ζ2) (Example 2). The adaptive parameters The adaptive parameters The system output x1,1 and given signal y1,d without the FTC technology (Example 2). The system output x2,1 and given signal y2,d without the FTC technology (Example 2).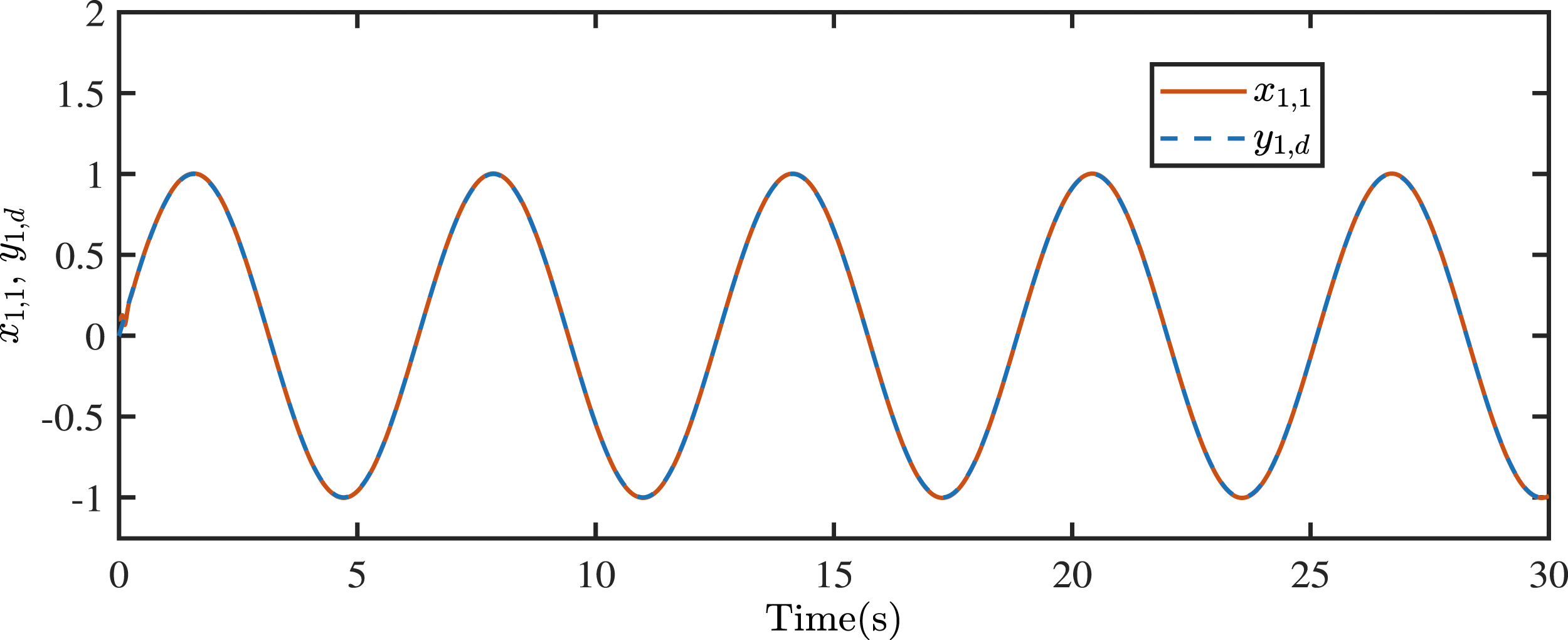
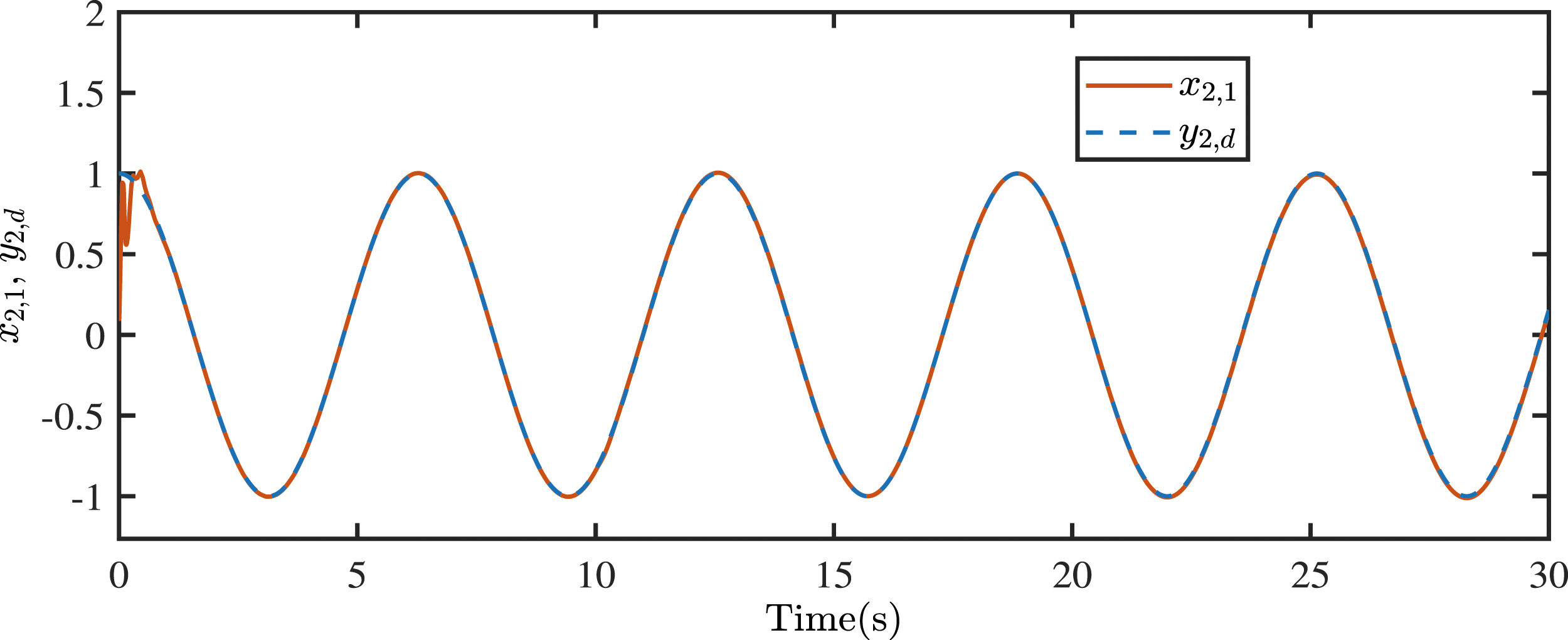
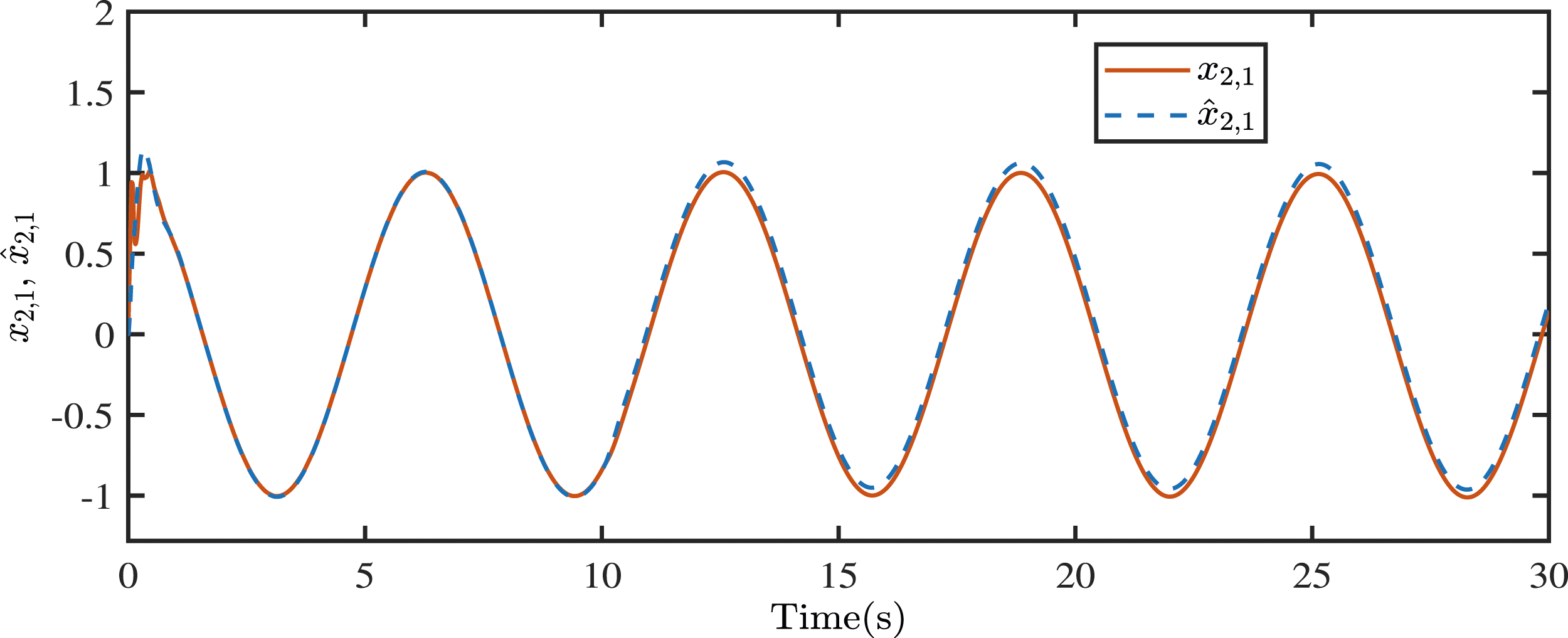
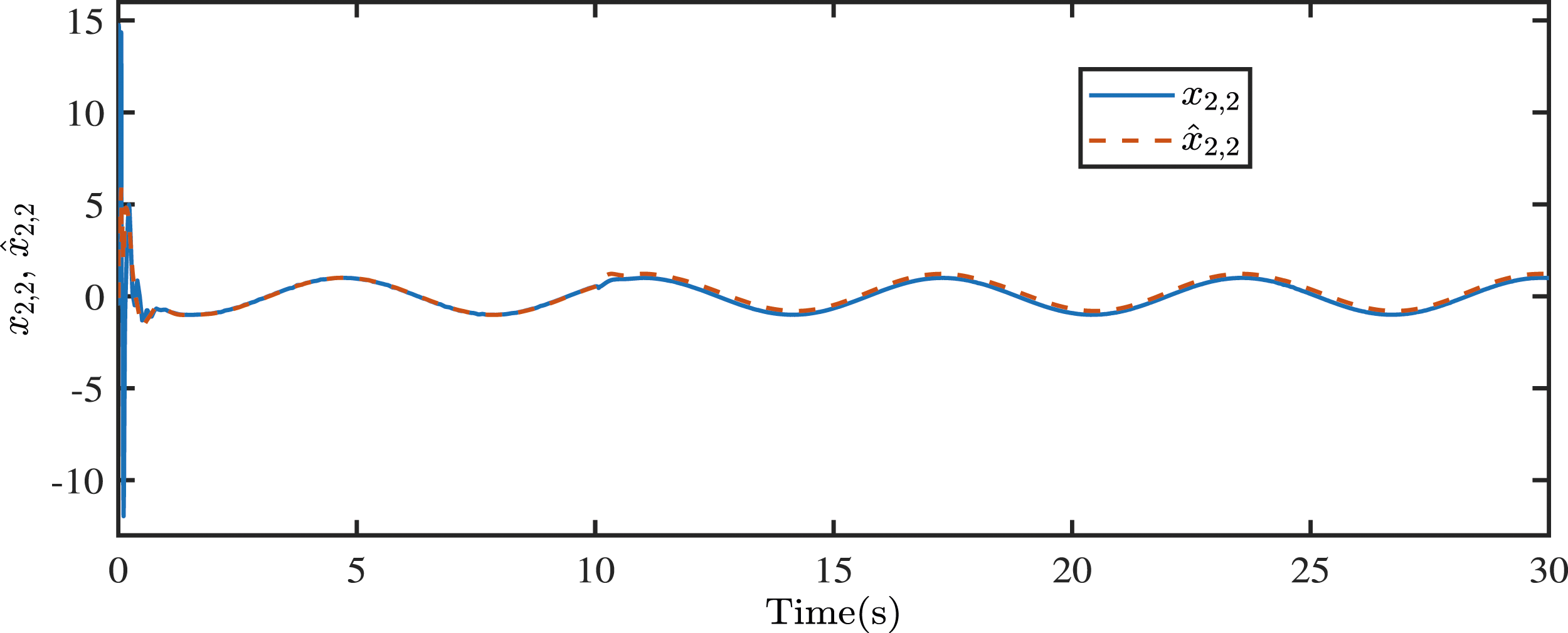
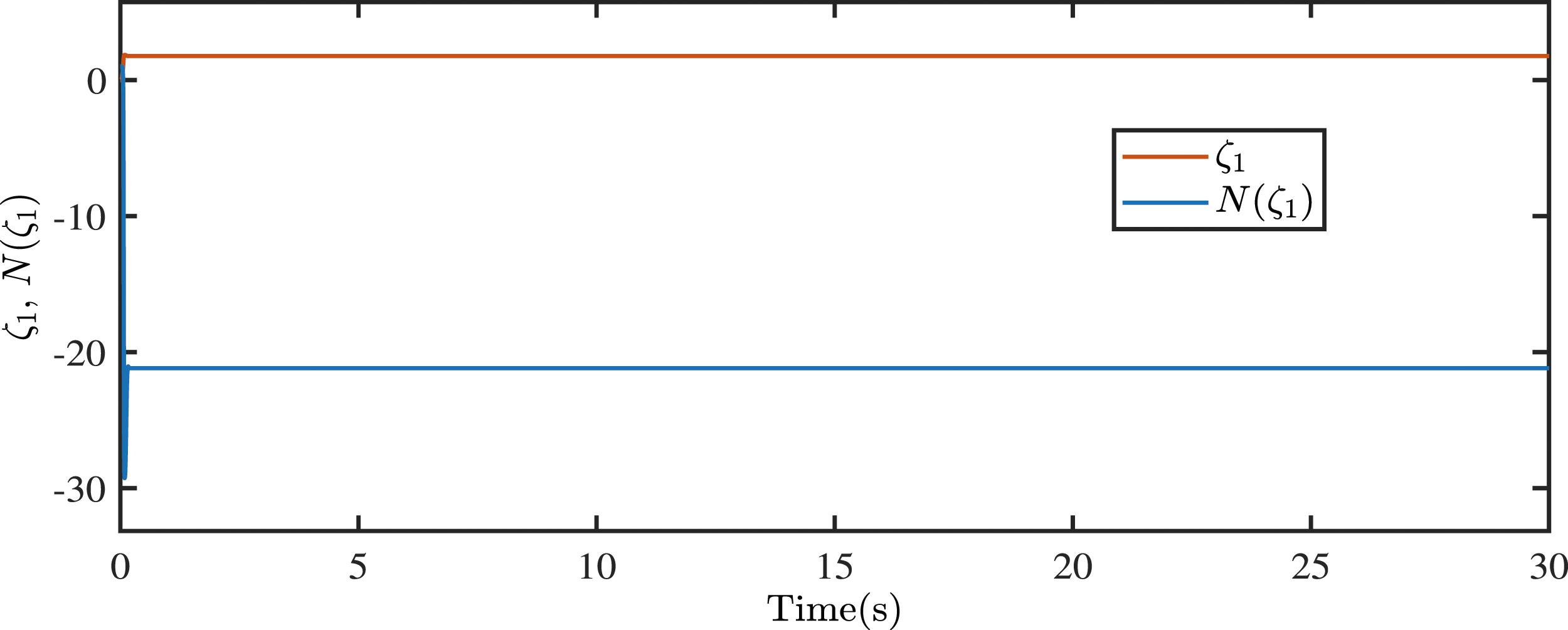
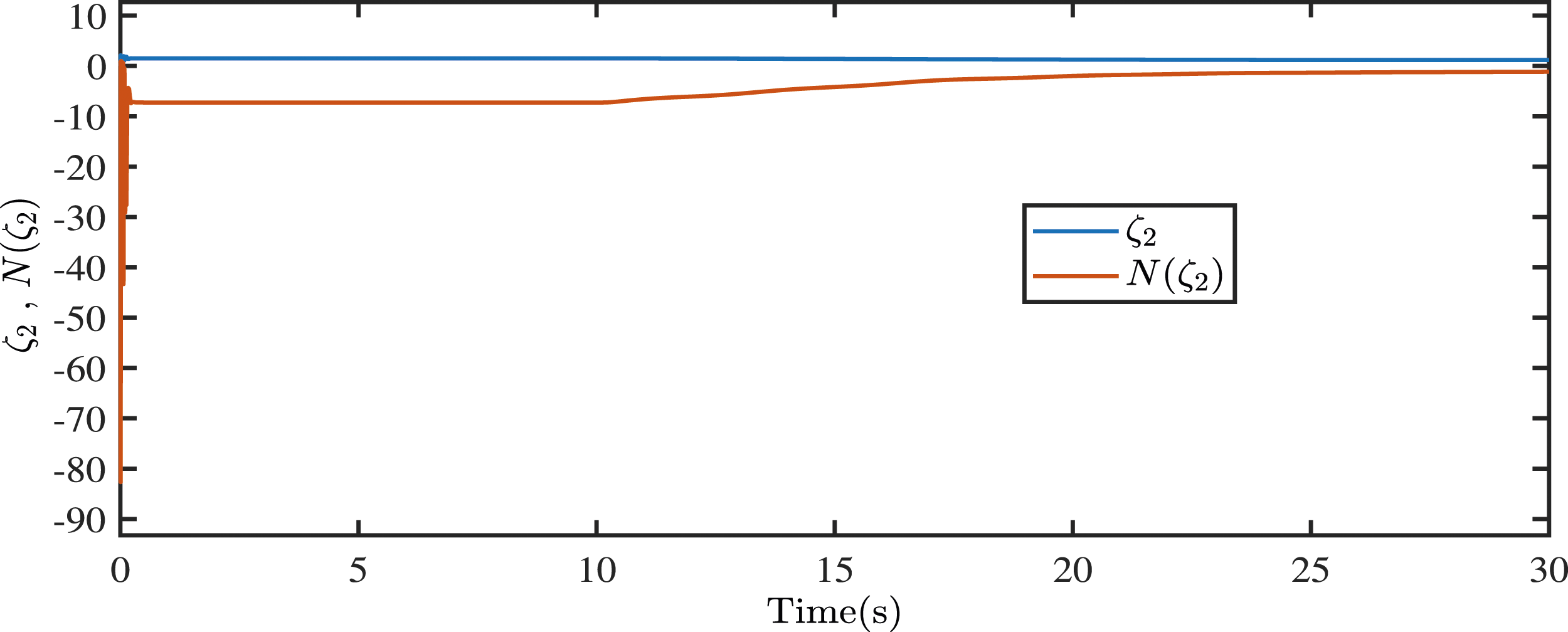
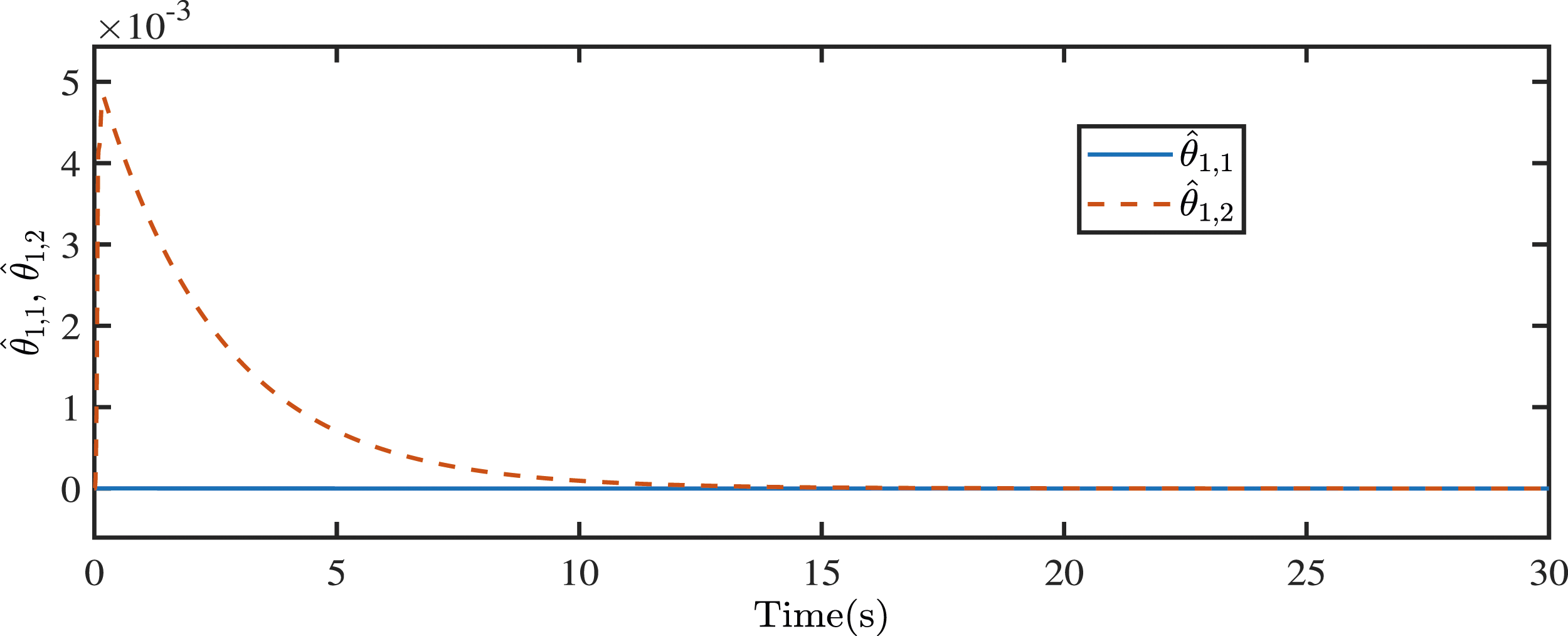
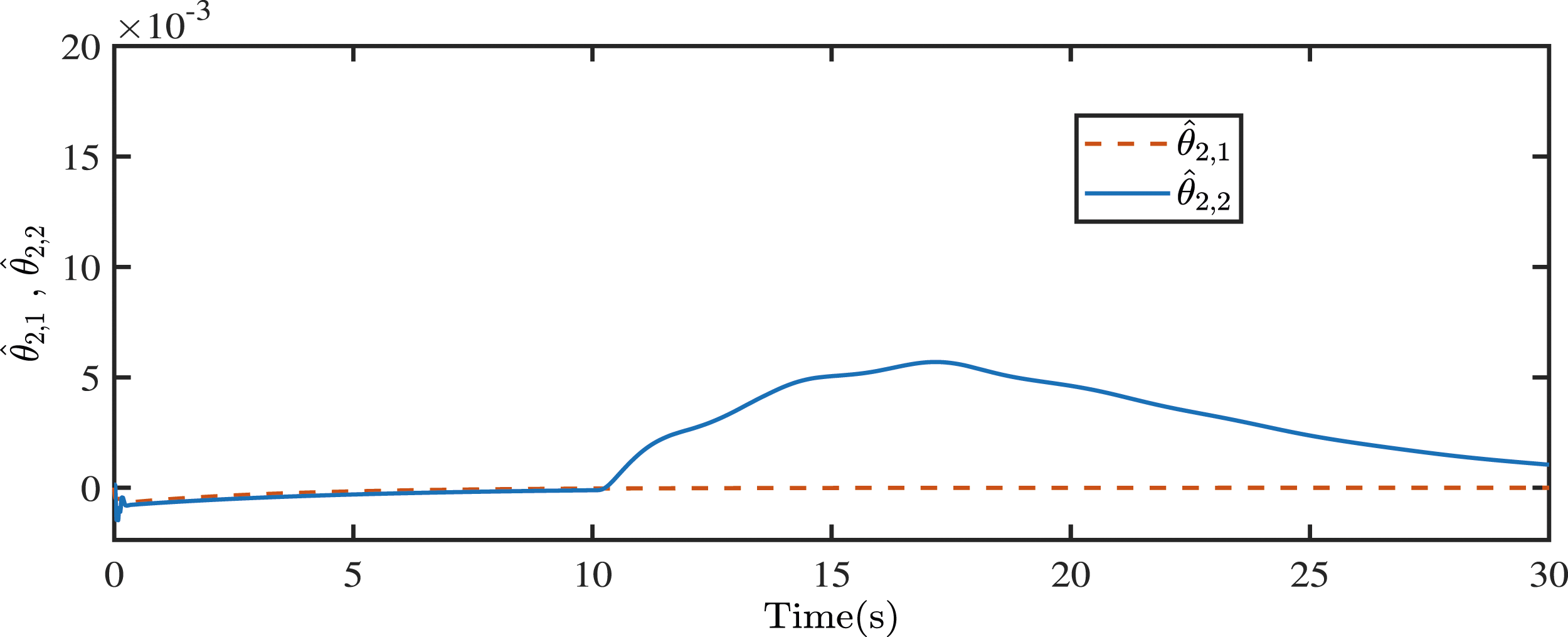
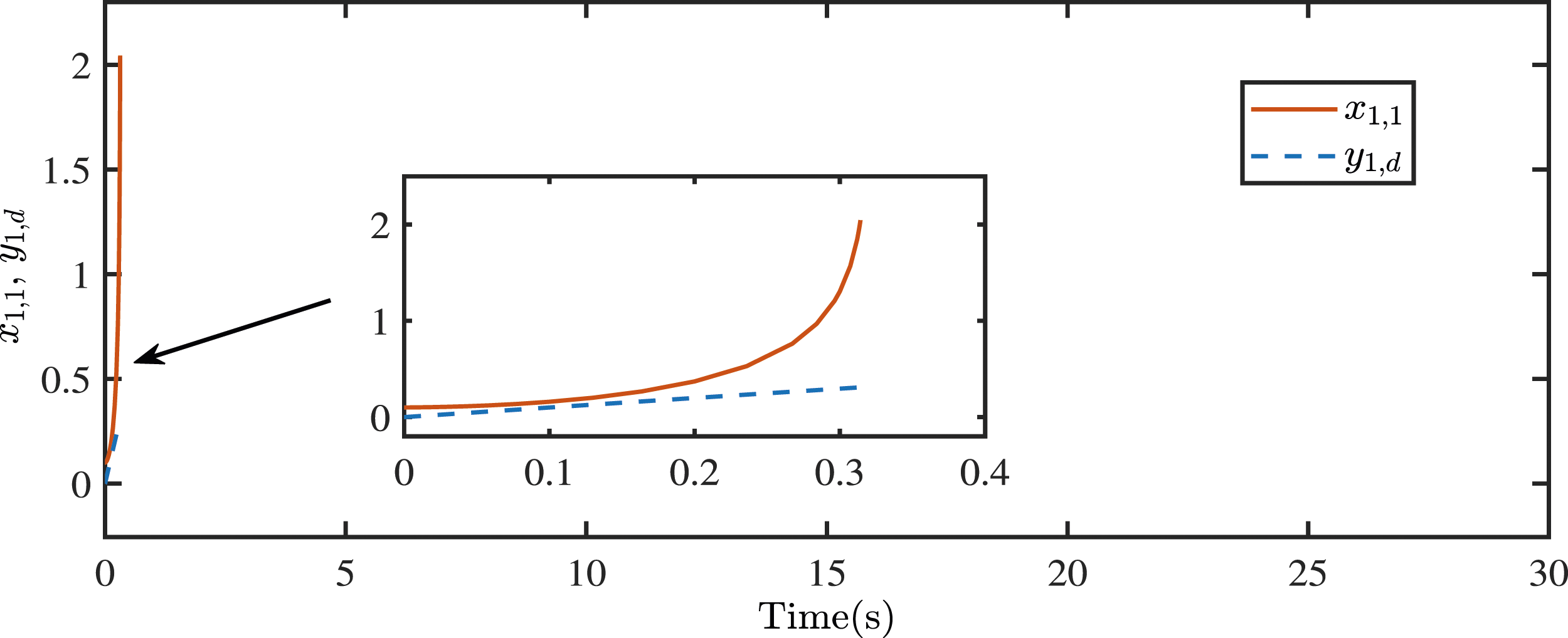
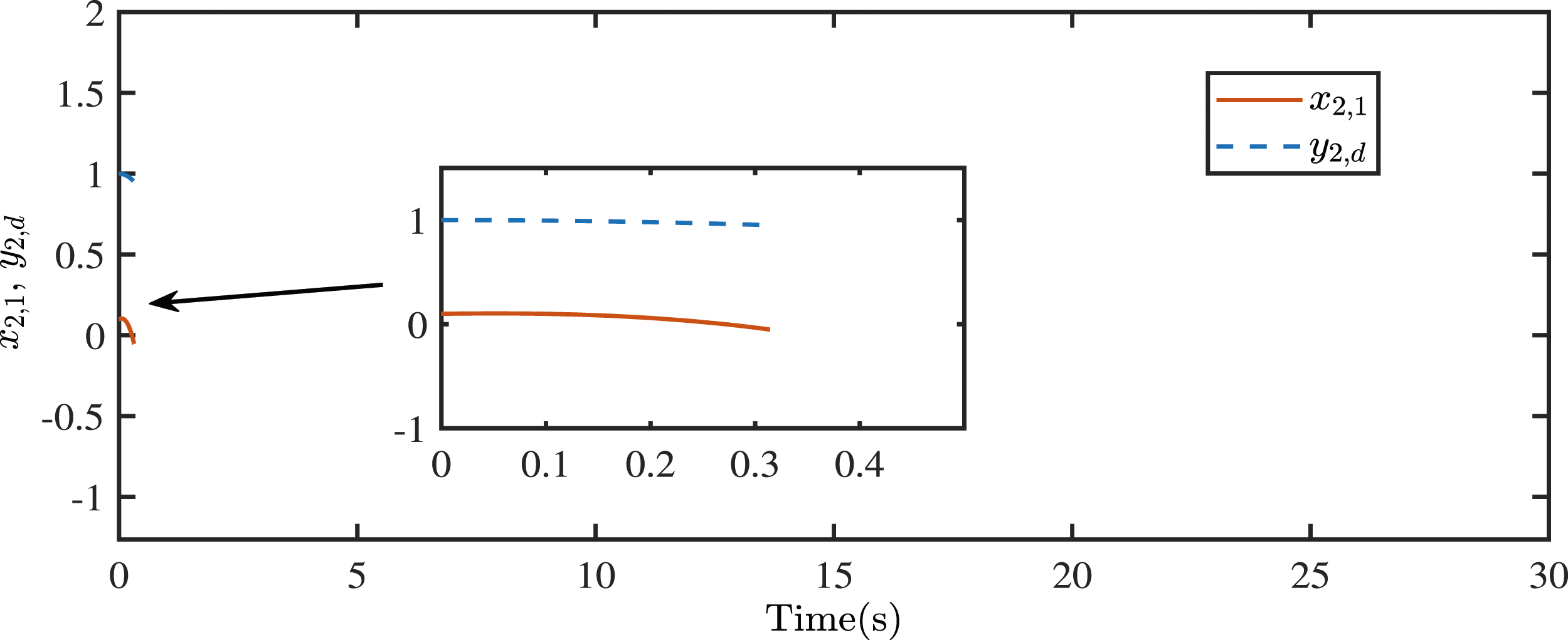
The results in Figures 17–28 show that the controller designed in this paper can ensure that the overall signals with the system (88) is SGFSP and the tracking errors can converge in a small neighborhood around the origin within finite-time. It is obvious from Figures 29 and 30 that the control system without the FTC algorithm proposed is unstable.
Conclusion
This paper considers the controller design challenge for MIMO stochastic NSFNSs with non-affine nonlinear faults and unmeasurable states. Employing input compensation techniques and mean-value theorems to deal with the non-affine nonlinear fault problem, which results in unknown nonlinear functions and unknown control coefficients being handled using FLSs and Nussbaum functions, respectively. In addition, fuzzy state observers with high gain have been established to address the unmeasurable states. By combining the adaptive backstepping technique, DSC approaches, error compensation mechanisms, and finite-time control theory, a novel adaptive fuzzy dynamic surface finite-time output feedback FTC algorithm is designed, which ensures that overall signals in the stochastic system are bounded, and the tracking errors of the controller developed in this paper can converge in a small neighborhood around the origin within finite-time. Finally, two simulation results have been presented to verify the effectiveness of the proposed control strategy. Extending the results of this research to the event-triggered adaptive fuzzy finite-time output feedback FLC and the prescribed performance adaptive fuzzy finite-time output feedback, FLC is one future area of interest.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The project is supported by the National Natural Science Foundation of China (62203347, 62103316), the National Natural Science Foundation of China (12001418), Shaanxi Province Natural Science Fund of China (2020JM-490), the Postdoctoral Science Foundation of China (2018M633476), the Youth Talent Promotion Program of Shaanxi Association for Science and Technology (20180505), Natural Science Foundation of Shaanxi Province (2017JQ6059), the Scientific Research Plan Projects of Shaanxi Education Department (19JK0466).