
Abstract
For a class of stochastic nonlinear systems, this paper proposes a novel event-triggered adaptive control scheme by means of multi-dimensional Taylor network (MTN) approach for the first time, which has the advantages of alleviating computational burden and reducing communication frequency. In addition, the event-triggered control (ETC) strategy can effectively save network resource by alleviating the computational burden and reducing the communication frequency. Therefore, the proposed control approach can not only reduce communication frequency but also further alleviate computational burden, thereby saving network resource to a greater extent. The proposed control scheme ensures that all signals of the system are semi-global uniformly ultimately bounded (SGUUB) in probability and the tracking error can be made arbitrarily small by choosing appropriate design parameters. Meanwhile, Zeno behavior can be avoided. Finally, two simulation results are given to illustrate the effectiveness of the proposed scheme.
Introduction
Stochastic disturbance is a major factor leading to system instability, which widely exists in most practical systems. Therefore, the research on stochastic nonlinear systems has become a hot research topic in recent years, and many effective control methods and theories have been reported, such as adaptive control (Liu et al., 2007, 2008), backstepping control (Deng and Krstic, 1999), Lyapunov stability theory (Florchinger, 1994), sliding mode control (Qi et al., 2020), and LaSalle’s invariance principle (Mao, 1999). Recently, adaptive backstepping control has also emerged as an effective method to address the unknown parameters in stochastic nonlinear systems (Gao et al., 2014; Wu et al., 2007). It is worth noting that this method is especially suitable for control nonlinear systems with structure uncertainties since it overcomes the shortcomings of the traditional control methods. However, with the increase in systematic complexity and the occurrence of parameter uncertainty, it will no longer be applied.
To address the above problems, the approximation-based adaptive neural networks (NNs) or fuzzy logic systems (FLSs) control methods for nonlinear systems were developed in the work by Leu et al. (1999), Li et al. (2021), and Ye et al. (2020). Moreover, the above control methods have also been extended to stochastic nonstrict-feedback systems (Wang et al., 2014; Wu et al., 2022), switched nonlinear systems (Han et al., 2009), strict-feedback nonlinear systems (Chen et al., 2018; Li et al., 2021), and pure-feedback nonlinear systems (Wang and Huang, 2002). Recently, the multi-dimensional Taylor network (MTN), a new NN with special structure, has been used to deal with the complex unknown nonlinearity of the systems. Immediately, many control schemes based on the MTN approximation have been reported for different systems, including single-input single-output (SISO) stochastic nonlinear systems (Han and Yan, 2018), large-scale stochastic nonlinear systems (Yan and Han, 2019), and switched nonlinear systems (Zhu et al., 2020b). In addition, the work by Han (2018), Yan et al. (2018), and Zhu et al. (2020a) focused on the study of output-feedback control problems for different systems. Under the MTN-based approximation framework, a tracking control scheme for stochastic nonlinear systems (Han, 2020) with input delay was studied, and the input delay problem for switched nonlinear systems was further studied in the work by He et al. (2022). Although the above MTN-based schemes can save network resource to a certain extent by alleviating the computational burden, these control schemes come up against difficulties when the communication channel bandwidth of the network is limited.
Compared with the above-traditional control schemes, the event-triggered based control scheme can save the consumption of network resource by alleviating the computational burden and reducing communication frequency. Therefore, event-triggered control (ETC) has attracted the attention of more and more researchers (Jetto and Orsini, 2014; Lehmann and Lunze, 2011; Lunze and Lehmann, 2010; Shen et al., 2016). It is worth noting that the controllers and triggering event conditions in the above-cited article were designed relatively independently. However, this design method cannot achieve the optimal control design of the controller and triggering event condition, which leads to the situation that the number of control execution is greater than the optimal control on the basis of ensuring the stability of the system. In response to the above problem, three event-triggered schemes were proposed for uncertain nonlinear systems in the work by Xing et al. (2017), in which the controllers were designed based on event-triggered mechanism. Then, this controller design method has been developed for different systems, such as strict-feedback nonlinear systems (Li and Yang, 2018; Wang and Li, 2021), non-strict-feedback nonlinear systems (Hu et al., 2021; Wang et al., 2021a), pure-feedback nonlinear systems (Zhang et al., 2020), multi-input multi-output nonlinear systems (Wang et al., 2021b), and stochastic nonlinear systems (Liu et al., 2018; Wang et al., 2019; Xia et al., 2021). To our knowledge, there have been few reports on studying event-triggered adaptive control of stochastic nonlinear systems so far, especially it has not been reported under the framework of MTN approximation.
According to the above analysis, the event-triggered adaptive MTN control problem for stochastic nonlinear systems is studied for the purpose of saving network resource. In the process of controller design, the MTNs are used to approximate the unknown nonlinearity, and then a novel event-triggered adaptive MTN control scheme is developed via backstepping technique. The main contributions are summarized as follows.
A new event-triggered adaptive MTN control method is proposed to solve the control problem of stochastic nonlinear systems. In this paper, by introducing ETC strategy, the proposed control method can not only ensure the stability of the system but also simultaneously save network resource. Meanwhile, all signals of the system are semi-global uniformly ultimately bounded (SGUUB) in probability and Zeno behavior is avoided.
The event-triggered adaptive controller in this paper is designed based on MTN. From the work by Han (2018) and Zhu et al. (2020a, 2020b), it is known that the controllers based on MTN can alleviate the computational burden. Therefore, compared with the event-triggered adaptive NNs controllers in the work by Li and Yang (2018), Wang et al. (2019, 2021b), and Zhang et al. (2020), the controller designed in this paper can further alleviate the computational burden, thereby saving network resource to a greater extent.
Although the MTN-based controllers designed in the work by Han (2018) and Zhu et al. (2020a, 2020b) can alleviate the computational burden, they still cannot solve the problem of limited communication channel bandwidth. In this paper, an ETC strategy is applied to adaptive MTN controller design to overcome the problem of limited channel bandwidth by reducing the communication frequency.
System description and preliminary
Problem description
The following stochastic nonlinear system is considered
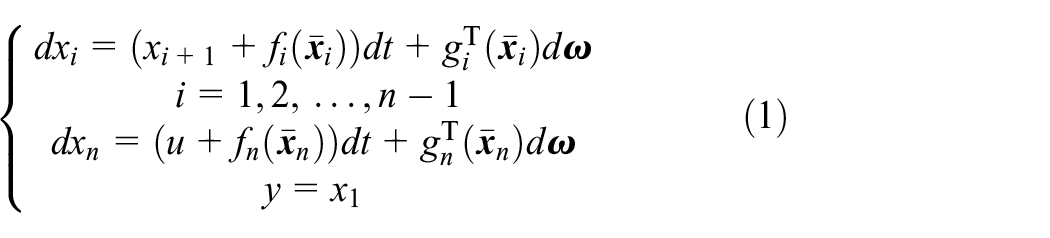
where
The purpose of this paper is to design an event-triggered adaptive MTN controller for system (1) to ensure that (1) the system output
Stability theory
To introduce the necessary definitions and lemmas, the following stochastic nonlinear system is considered

where

where

For all

where

MTN
As a new type of approximation network, MTN is used to approximate unknown nonlinearity in compact set

where
Controller design and stability analysis
Event-triggered adaptive MTN controller design
In this section, a new event-triggered adaptive MTN controller is designed by combining backstepping technology and ETC strategy. To implement the controller design, the coordinate transformation is defined as follows

where

Selecting the appropriate first Lyapunov function as follows

where
Then, according to Definition 1, one can obtain the following formula

Using Young’s inequality, the inequality is obtained as follows

where
Substituting equation (11) into equation (10), one gets the following inequality

where
Because

where
Based on equations (12) and (13), it follows that

The following inequality can be obtained using Young’s inequality


By combining equations (15) and (16), equation (14) can be rewritten as
Then, constructing the first virtual control signal


where
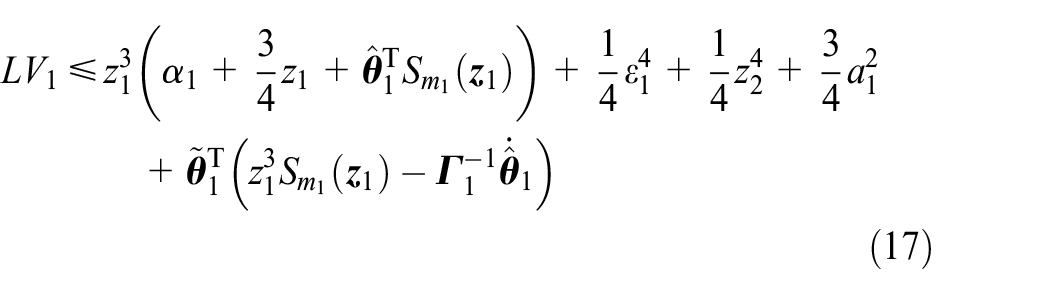
Substituting equations (18) and (19) into equation (17) yields

where

where
Selecting the appropriate second Lyapunov function as follows

where
Then, according to Definition 1, one can obtain the following formula

Using Young’s inequality, the inequality is obtained as follows

where
Substituting equations (24) into (23), one gets the following inequality

where
Because

where
Based on equations (25) and (26), it follows that

The following inequality can be obtained using Young’s inequality


By combining equations (28) and (29), equation (27) can be rewritten as
Then, constructing the second virtual control signal


where
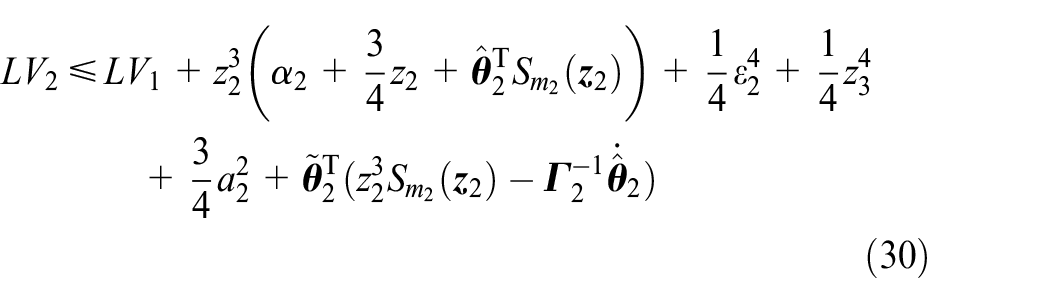
Substituting equations (31) and (32) into equation (30) yields
where

where
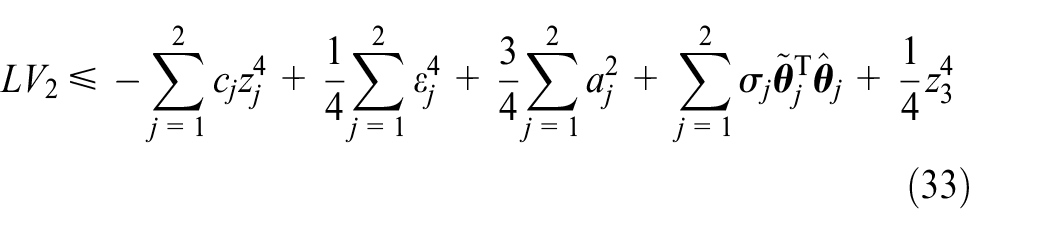
Selecting the appropriate

where
Then, according to Definition 1, one can obtain the following formula

Using Young’s inequality, the inequality is obtained as follows

where
Substituting equation (37) into equation (36), one gets the following inequality

where
Similarly, by virtue of Lemma 4, for

where
Based on equations (38) and (39), it follows that
The following inequality can be obtained using Young’s inequality


By combining equations (41) and (42), equation (40) can be rewritten as
Then, constructing the


where
Substituting equations (44) and (45) into equation (43) yields
where

where
Selecting the appropriate

where
Then, according to Definition 1, one can obtain the following formula

Using Young’s inequality, the inequality is obtained as follows

where
Substituting equation (37) into equation (36), one gets the following inequality

where
Similarly, by virtue of Lemma 4, for

where
The following inequality can be obtained using Young’s inequality

By combining equations (52) and (53), equation (51) can be rewritten as
According to the above analysis, the event-triggered adaptive MTN controller and the adaptive law


The triggering event condition using fixed threshold is designed as

where
From equation (57), obviously,
Substituting equation (55) into equation (58) yields
By applying Lemma 3, equation (59) can be transformed into the following form
Selecting
where
Stability analysis

According to equation (61), we can get
with

with

Substituting equations (64) and (65) into equation (63) yields
where
Let

Then, according to Lemma 1 and for

Therefore, we have


From equations (69) and (70), we know that
Then we need to prove that

From equation (55), the time derivative of

Obviously,
From equation (70), we can get

According to the above inequality, we can further get

Therefore, we can make the tracking error converges to an arbitrarily small range by increasing the control parameters
Simulation results
In this note, a numerical example and a practical example are used to demonstrate the effectiveness of the design strategy.

with the initial states
According to Theorem 1, the MTN-based event-triggered adaptive tracking control strategy of system (75) can be designed as follows




where
In simulation, the design parameters of the system controller and the triggering event condition are selected as
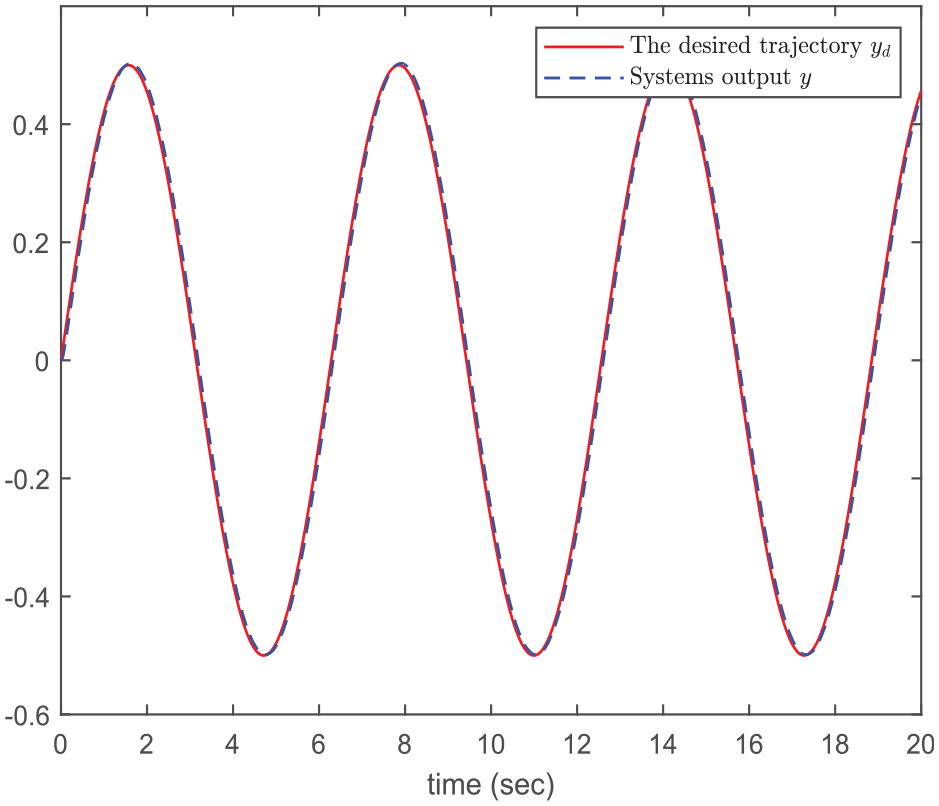
The trajectories of
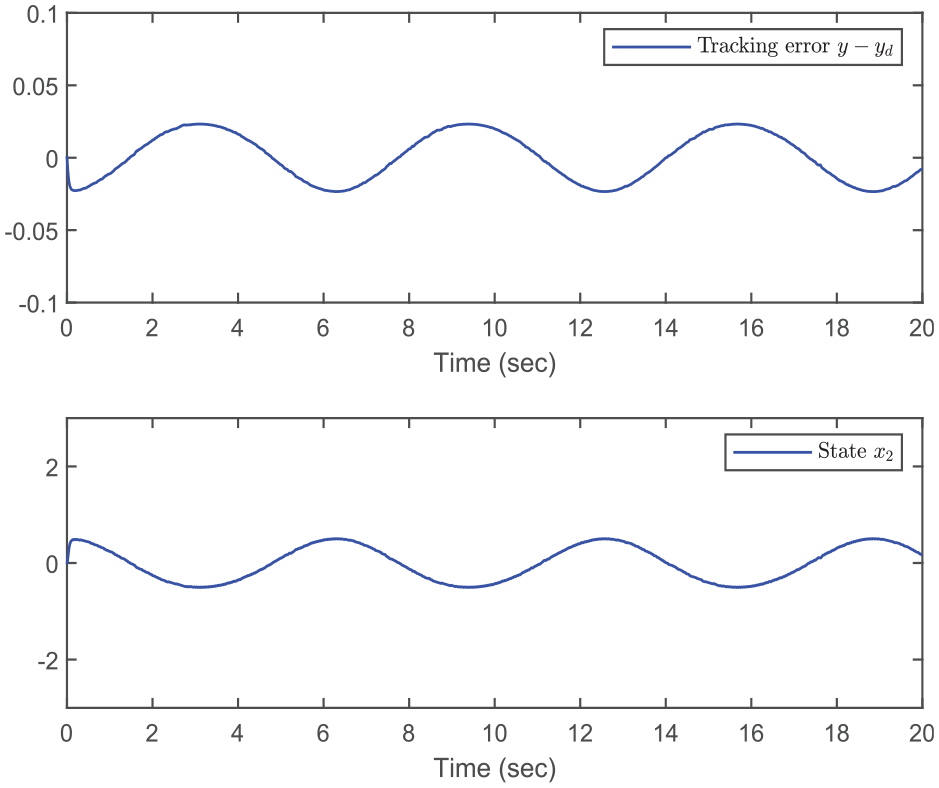
The trajectories of tracking error
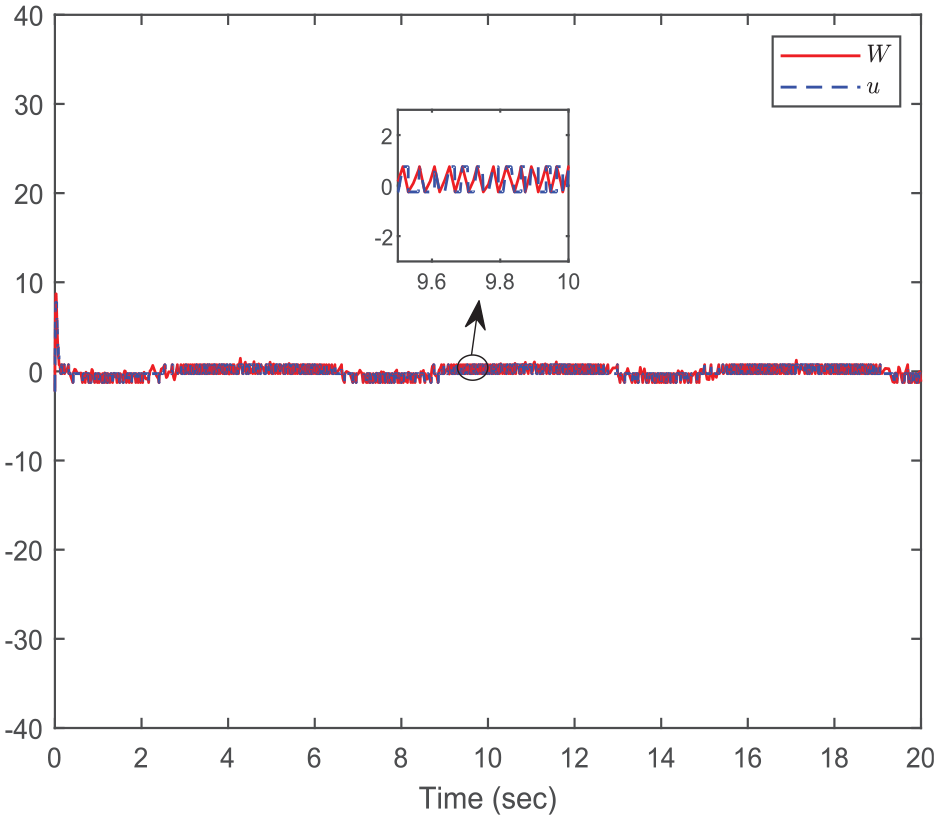
The trajectories of
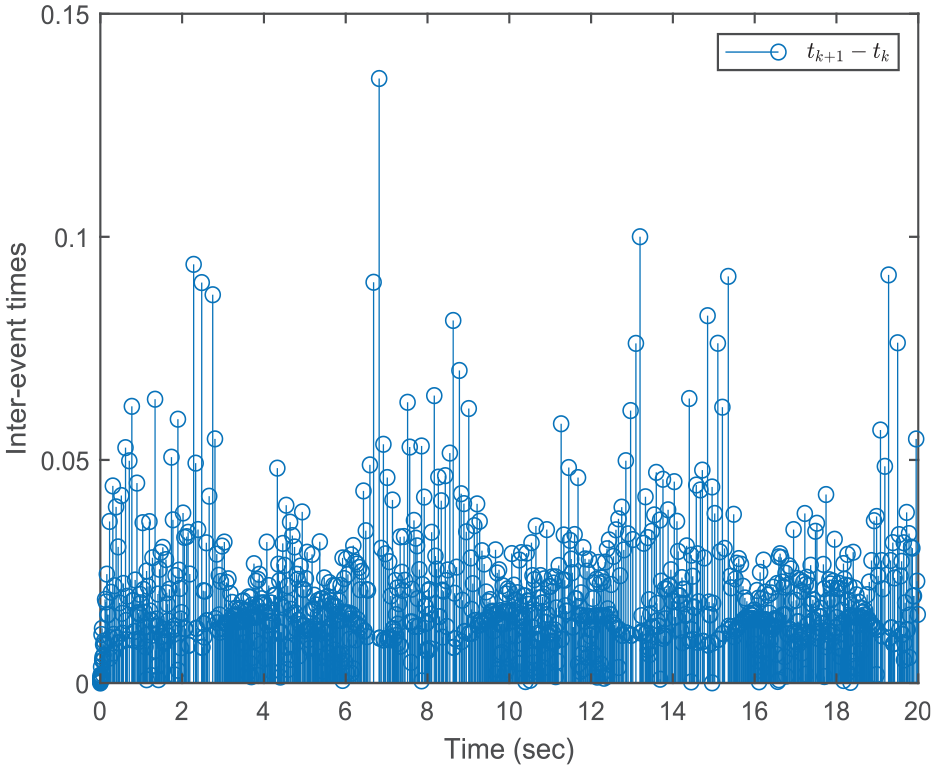
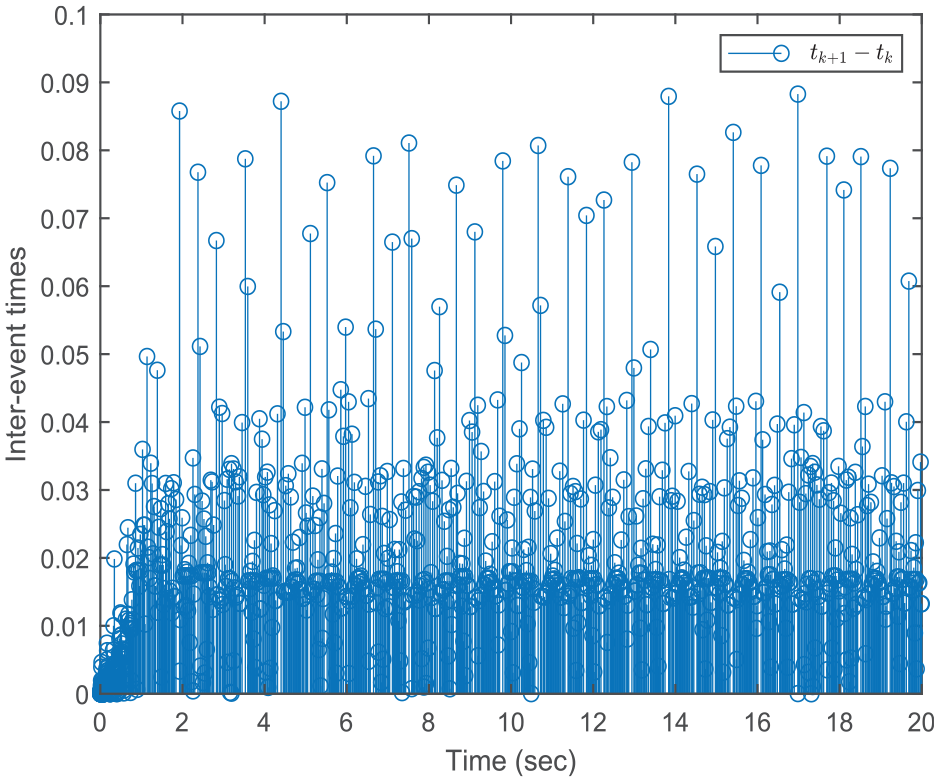
The time interval of triggering events of equation (75).
Figure 1 depicts the curves of the desired signal
with the initial values of the system are defined as
According to Theorem 1, the MTN-based event-triggered adaptive tracking control strategy of system (76) can be designed as follows




where
In simulation, the design parameters of the system controller and the triggering event condition are selected as
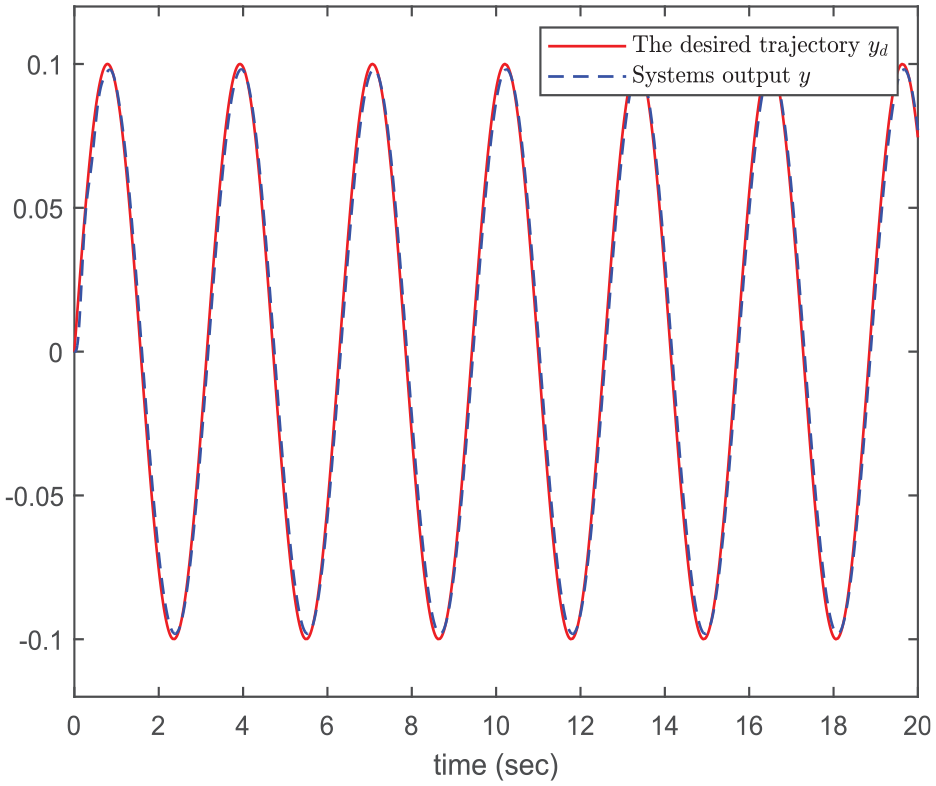
The trajectories of
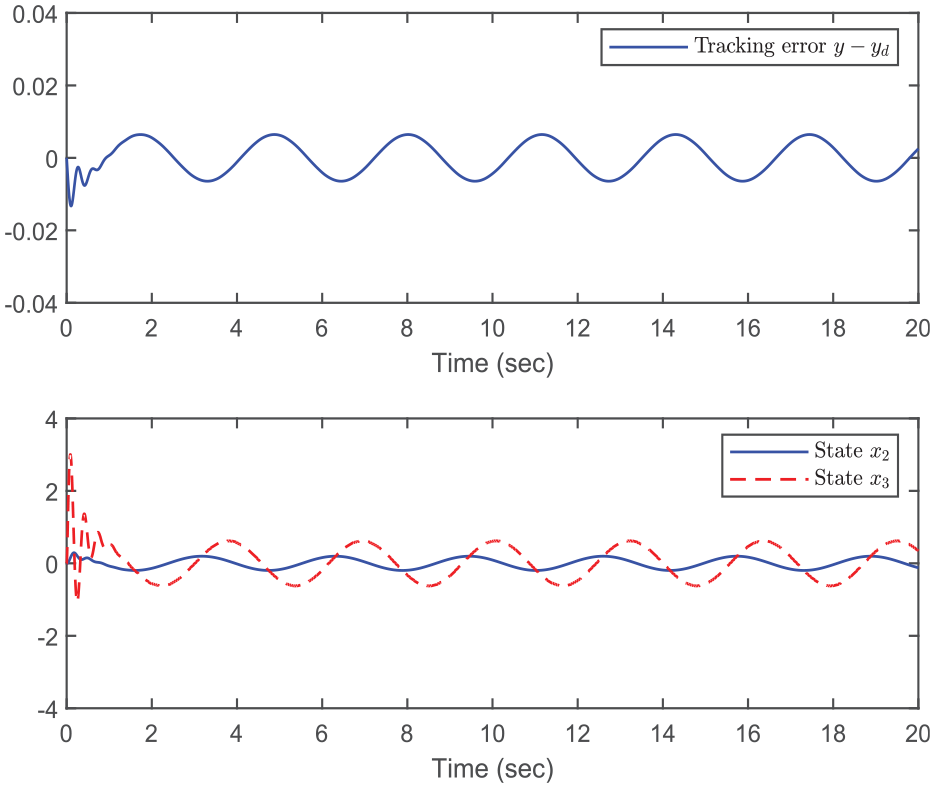
The trajectories of tracking error
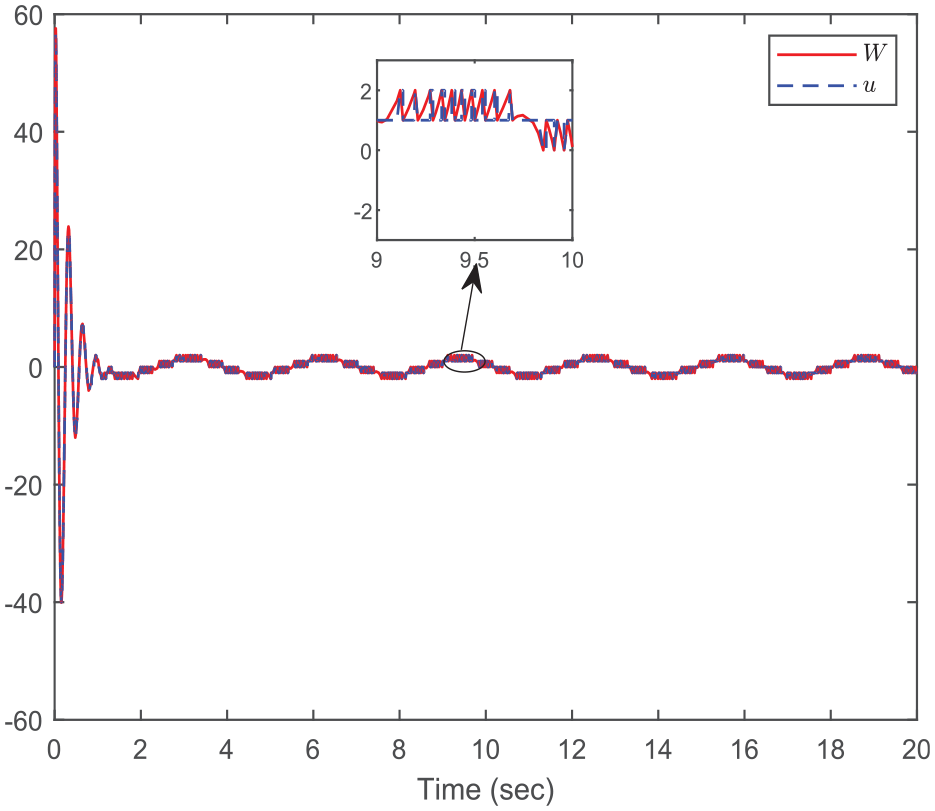
The trajectories of
The time interval of triggering events of equation (76).
Figure 5 depicts the curves of the desired signal and the output signal. The responses of the tracking error
Conclusion
In this paper, an MTN-based event-triggered adaptive tracking control scheme for stochastic nonlinear systems is proposed, which successfully saves network resource to a greater extent by alleviating computational burden and reducing communication frequency. Meanwhile, the proposed control scheme can avoid the Zeno behavior and achieve the satisfactory tracking control performance. Finally, the effectiveness of the proposed controller is demonstrated by two examples.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Shandong Provincial Natural Science Foundation, China (Grant No. ZR2020QF055).