
Abstract
In this paper, the problem of adaptive control is investigated for a class of non-strict feedback stochastic nonlinear systems with input delay. First, the effect of the input delay is eliminated by constructing an appropriate auxiliary system with the same order as the considered system. Then, with the help of the backstepping technique and the structural characteristics of the radial basis function (RBF) neural network (NN), an adaptive neural control scheme is extended to non-strict feedback stochastic nonlinear systems with input delay, in which uncertain nonlinear functions are approximated by RBF NN. Furthermore, the proposed adaptive controller ensures that all the closed-loop signals remain bounded in probability. Finally, two examples are provided to confirm the effectiveness of the designed strategy.
Keywords
Introduction
In practice, such as in chemical systems and power systems, stochastic uncertainties exist widely, which often lead to performance degradation and instability of closed-loop systems. During the past decades, the control of stochastic nonlinear systems has attracted extensive attention. Specially, the control scheme for deterministic nonlinear systems was successfully extended to stochastic cases by the aid of backstepping technique. A controller was proposed based on quadratic Lyapunov function and risk-sensitive criteria to ensure that the closed-loop system maintains global asymptotic stability (Pan and Basar, 1999). Deng and Krstić (1997a, 1997b) and Deng et al. (2001) used the biquadratic Lyapunov function to design a backstepping method for stochastic nonlinear systems, which was further introduced to inverse optimal control and so on (Duan and Xie, 2011; Liu and Zhu, 2021; Su et al., 2021; Wang et al., 2022; Zhang et al., 2022; Zhao et al., 2022). In addition, for the system with unknown nonlinear function, with the help of the radial basis function (RBF) neural network (NN) and fuzzy logic system approximation ability, an adaptive fuzzy/neural controller was presented to secure the stability of the closed-loop system (Fu et al., 2022; Jiang et al., 2022; Li et al., 2017, 2019, 2022; Liu et al., 2021; Ma et al., 2018; Qiu et al., 2022; Tehrani et al., 2019; Wang et al., 2020, 2022; Yang et al., 2020). In the design of these control strategies, NN and fuzzy logic systems were implemented to estimate unknown nonlinear functions, and ideal controllers were constructed by means of the backstepping method and the Lyapunov stability theorem. Although these control approaches have been successfully applied to practical systems, they were only suitable for strict feedback forms.
It is well known that non-strict feedback systems, such as ball-beam system and hyperchaotic LC oscillating circuit system, are more universal in practical engineering applications (Tsafack et al., 2020; Yu, 2009). Moreover, the function of the non-strict feedback system is related to all the system states, which makes it difficult to design the control strategy using the backstepping technique. Therefore, it is very important to study the control problem of non-strict feedback system. Using a monotone increasing function as boundary function, the variable separation method was proposed (Chen et al., 2012), and the adaptive fuzzy control scheme was introduced to the non-strict feedback form. Then, using the same thought, an adaptive control strategy based on NN was presented for stochastic nonlinear systems with non-strict feedback (Wang et al., 2014) and has been widely promoted (Li and Tong, 2017; Wang et al., 2015a, 2015b). In addition, according to the structural characteristics of RBF NN, the backstepping method was extended to stochastic nonlinear systems with non-strict feedback, and the complexity of the controller design was significantly reduced (Sun et al., 2016a, 2016b; Wang et al., 2020; Wu et al., 2022). However, the effect of input delay is not considered in the above literature. As is known to all, input delay is extremely common in engineering applications.
In practical engineering applications, the input delay is inevitable because of the time needed for signal transmission and material transportation, which often results in the instability of the system (Ai et al., 2016). To solve this issue, some meaningful control approaches were put forward for the nonlinear systems with input delay. Nguyen (2023) presented an adaptive delay compensation scheme, and a novel finite-time delay compensation mechanism was proposed to reduce the impact of input delay (Lin et al., 2023). A control method based on the predictor was constructed (González and García, 2021; Lhachemi and Prieur, 2022; Liu and Lin, 2022; Sun et al., 2022; Wu and Lian, 2022), while Yang et al. (2020) and Li et al. (2017, 2019, 2022) presented a coordinate transformation scheme combined with the Pade approximation to compensate for the input delay. An adaptive fuzzy control strategy for nonlinear input delay systems was designed (Yang et al., 2020), in which the problem of input delay was solved by fuzzy Laplace transform. Niu and Li (2018) dealt with the effect of input delay by adding an integral compensation term to the error transform. And Ma et al. (2018), Wang et al. (2020), Liu et al. (2019), and Zhai et al. (2023) proposed an adaptive neural control method by introducing an appropriate auxiliary system with the same order as the considered system to address the influence of input delay. However, to the author’s knowledge, there were few literatures on the use of auxiliary systems to solve the input delay problem. In addition, most of the existing methods were focused on the deterministic strict feedback system, and few involved non-strict feedback cases. This means that the research of non-strict feedback stochastic nonlinear systems with input delay is a valuable topic, which is also the motivation of this paper.
Motivated by the above considerations, in this paper, an NN-based adaptive control approach is proposed for non-strict feedback stochastic nonlinear systems with input delay. The main contributions of this paper are listed as follows:
Compared with the existing results, a more general non-strict feedback stochastic nonlinear input delay system is considered. In the design process of controller, RBF NN is used to model unknown nonlinear functions. In addition, with the aid of the structural characteristics of RBF NN, the backstepping method is extended to the non-strict feedback form, which significantly reduces the complexity of the controller design.
A suitable auxiliary system with the same order as the considered system is utilized to compensate for the influence of the input delay.
With the help of backstepping technique and the Lyapunov stability theorem, an NN-based adaptive controller is introduced to a class of non-strict feedback stochastic nonlinear systems with input delay. The presented controller in this paper guarantees that all signals in the closed-loop system are bounded in probability.
The remainder of this paper is organized as follows: Some preliminaries are given in section “Preliminary.” Section “Main Results” discusses the design and stability analysis of the controller. Two simulation examples are provided in section “Simulation.” And section “Conclusion” draws the conclusion.
Preliminary
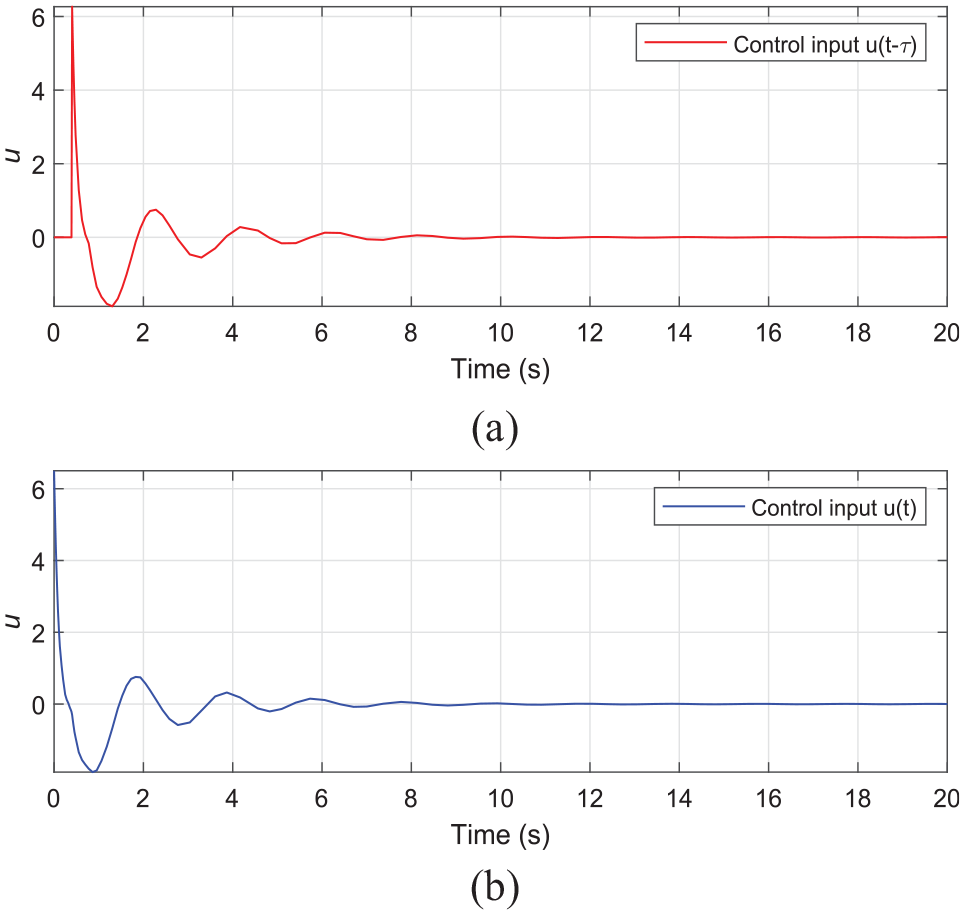
In this paper, a class of non-strict feedback stochastic nonlinear systems with input delay is considered as follows
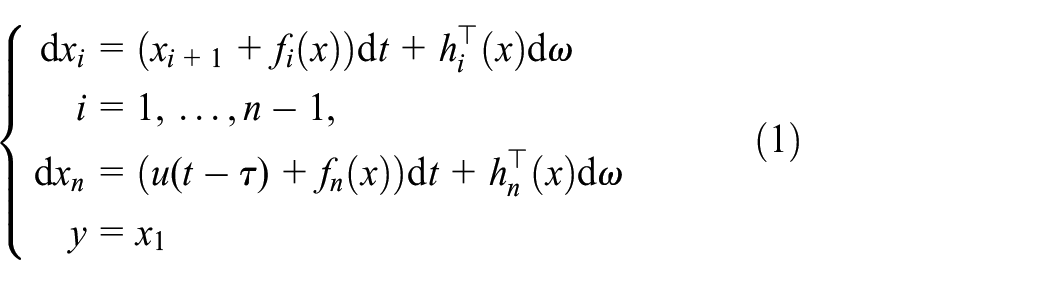
where
The goal of this paper is to create an adaptive NN control law for system (1) so that all the closed-loop signals remain bounded in probability. To this end, some preliminary information on stochastic systems is presented below. Consider the following nonlinear stochastic system

where

Then stochastic system (2) has a unique solution almost surely and is said to be bounded in probability.
In this paper, the continuous function

where

where
For any given accuracy

where


Main results
Controller design
First, the following auxiliary system is introduced to address the issues raised by input delay (Ma et al., 2018; Wang et al., 2020)

where
A controller based on NN is designed in this part, which is realized by the coordination transformation as follows

where
The design procedure is shown in the following steps.
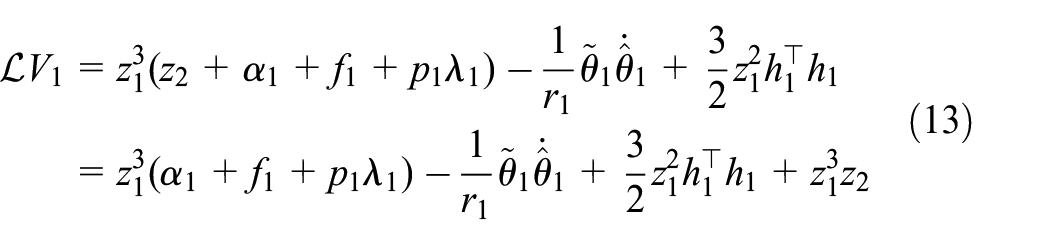
Consider the following Lyapunov function

where
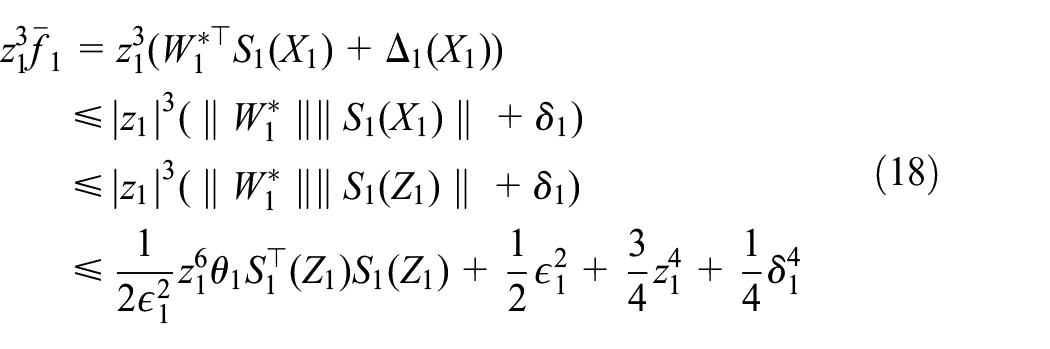
According to Young’s inequality, the inequalities can be obtained as follows


where

where

where
where
Next, choose the following virtual control signal


where

where
Let

where
Applying Young’s inequality to the final two terms in equation (26) demonstrates that


with

where

where

where
Next, the virtual control signal


where
where
Let

where
With the help of Young’s inequality, we have

where

where

with

where
Next, select the control signal


with
Stability analysis
According to the above discussion, the main results are expressed as follows:

Based on equation (47), it follows that
Since

The inequality equation (49) can be further expressed as
Let

Based on Lemma 1, it can be concluded that the closed-loop signals

By integrating equation (53) over

And according to equation (48), we have

Using the inequality

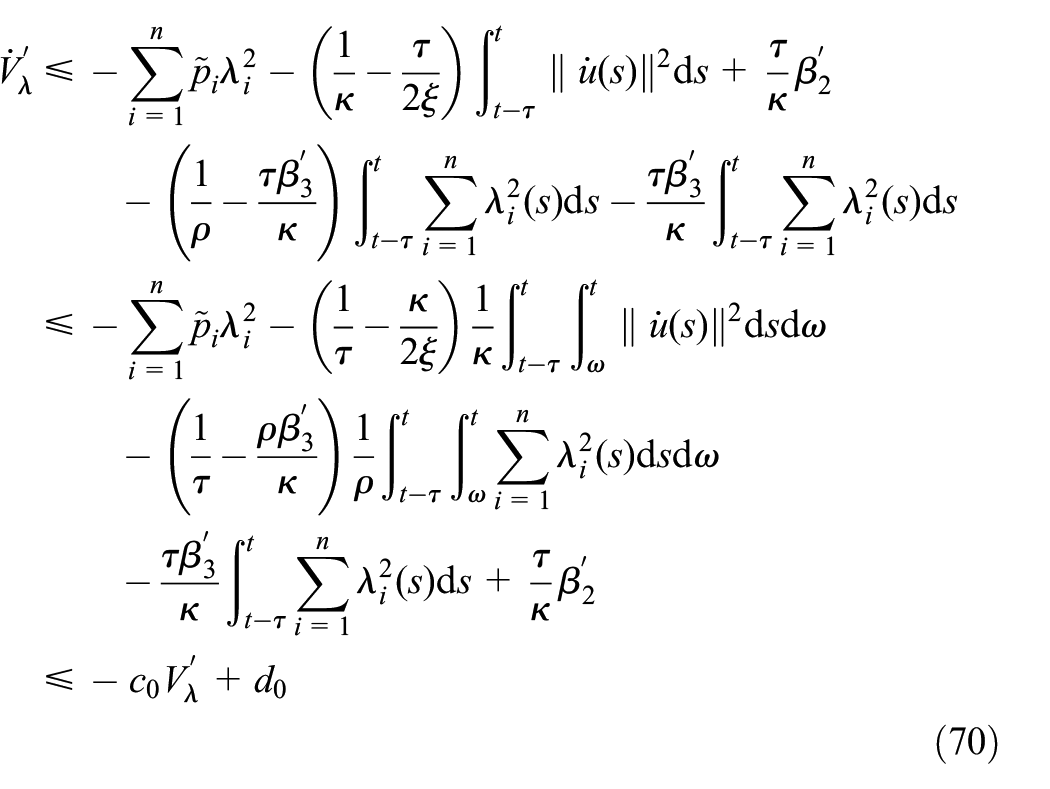
Then, this paper discusses the boundedness of

where
where
Then, substituting equation (58) into equation (57) yields
Then the term


where


where
where

Next
where
Subsequently, for auxiliary system (9), the Lyapunov functional is chosen as follows
where
where
Substituting equation (69) into equation (68) gives
where
Integrating the above differential inequality from

Similarly, based on equation (67), we obtain

Therefore, it is obtained from equation (55) and equation (72) that

Then

This means that the system state
From the above discussion, according to Lemma 1, equation (52), and equation (70), it is easy to prove that the signals
The design scheme of the aforementioned adaptive controller could be visualized in Figure 1.
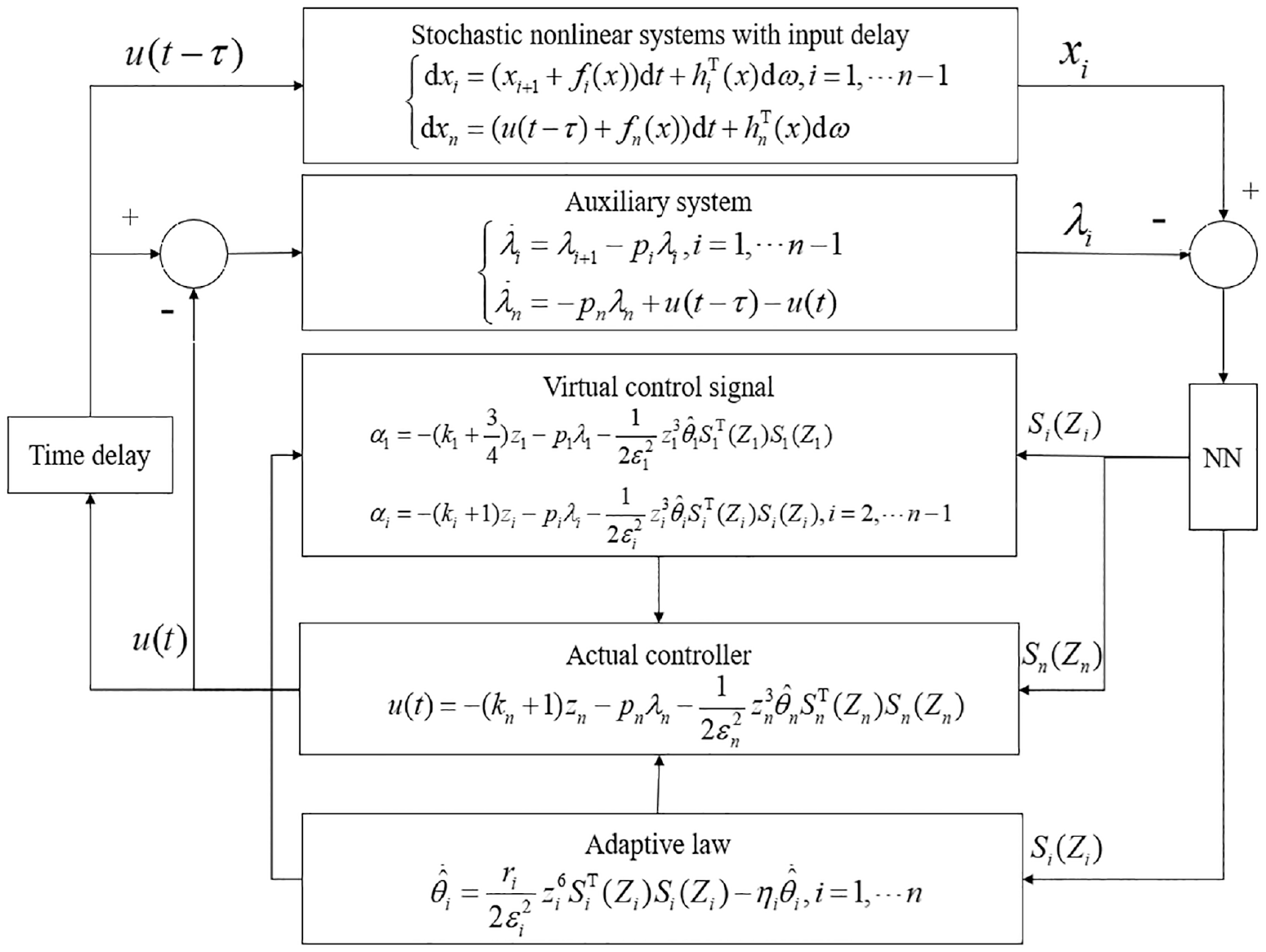
The block diagram of controlled system.
Simulation
In order to demonstrate the effectiveness of the proposed control scheme, two examples are provided as follows:
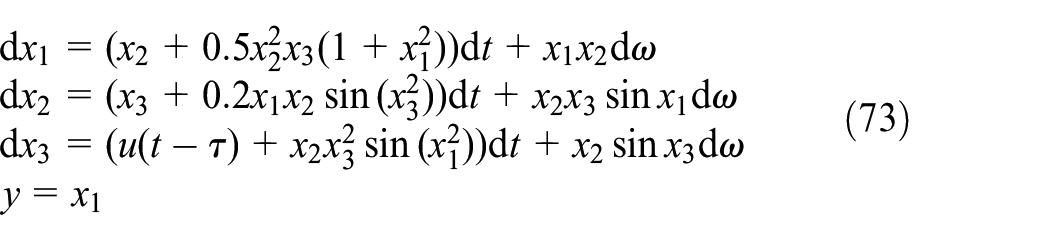
where

Based on Theorem 1, the virtual control
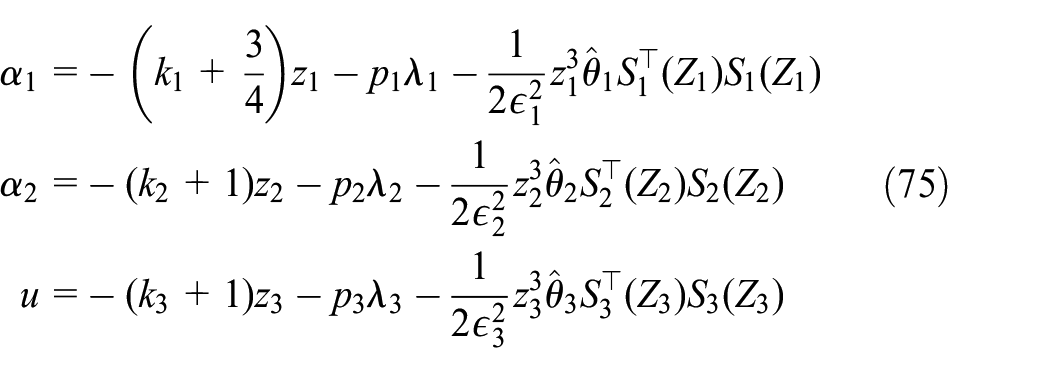
where

where,
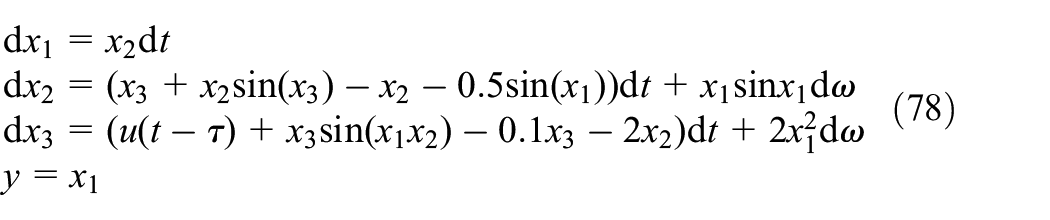
The simulation results are illustrated in Figures 2–4. The state trajectories
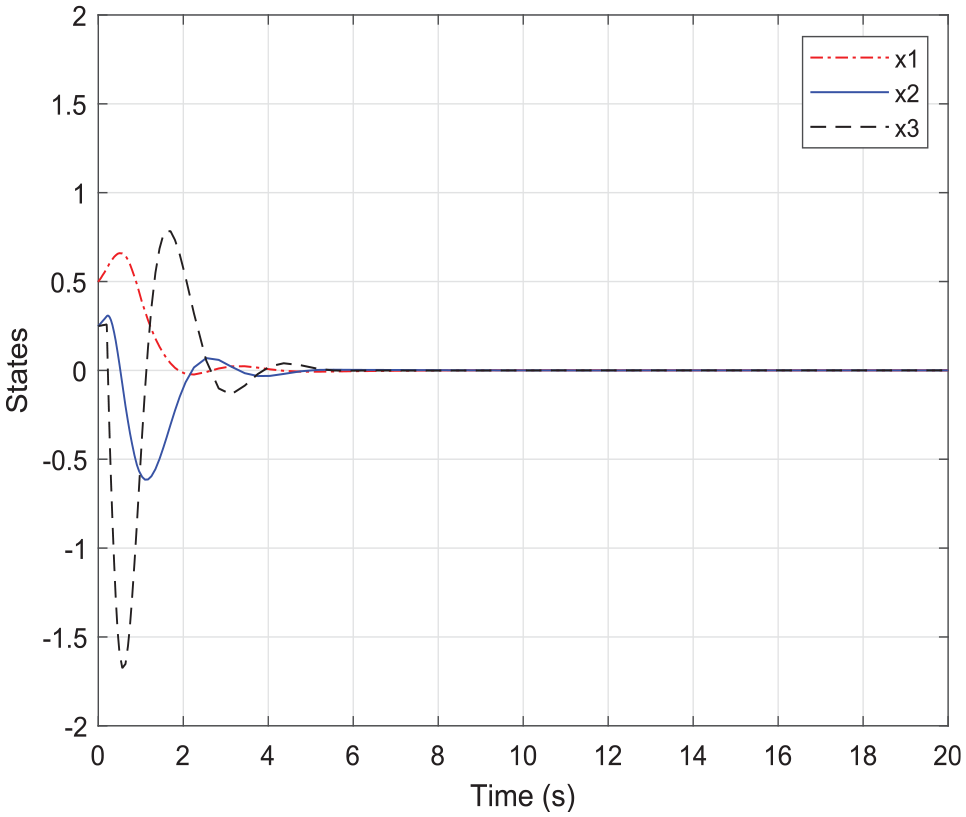
The trajectories of system states
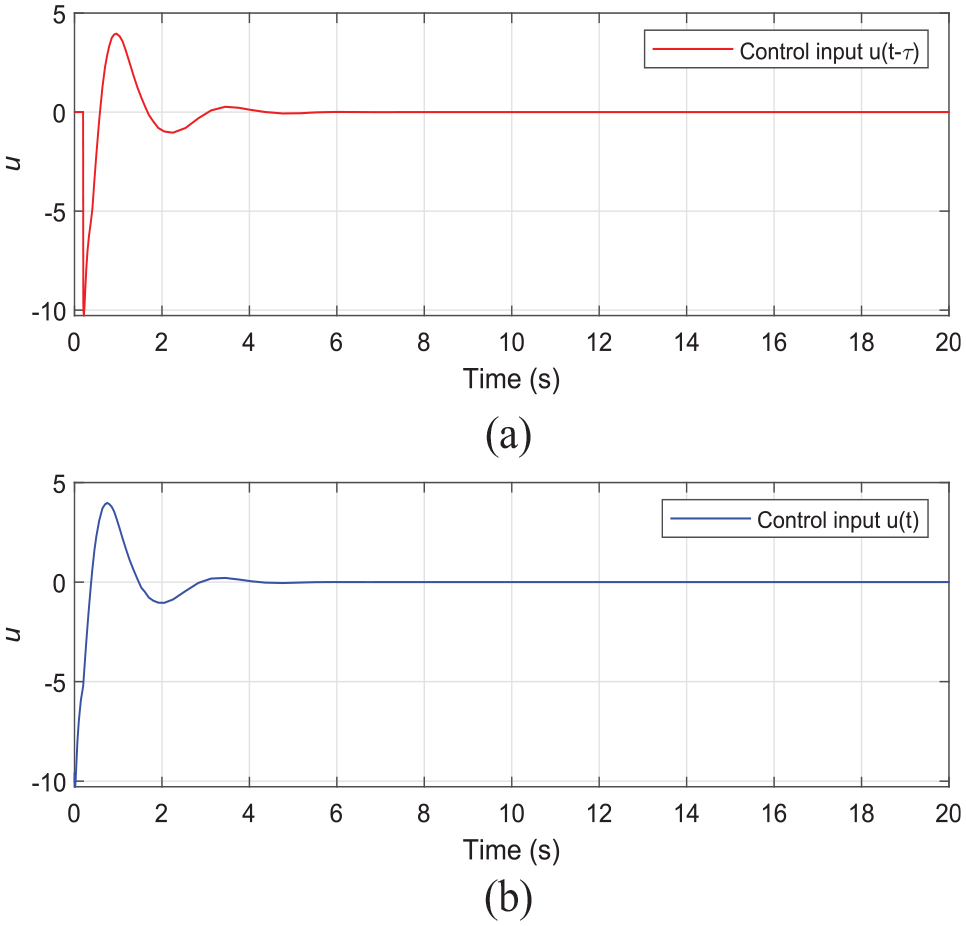
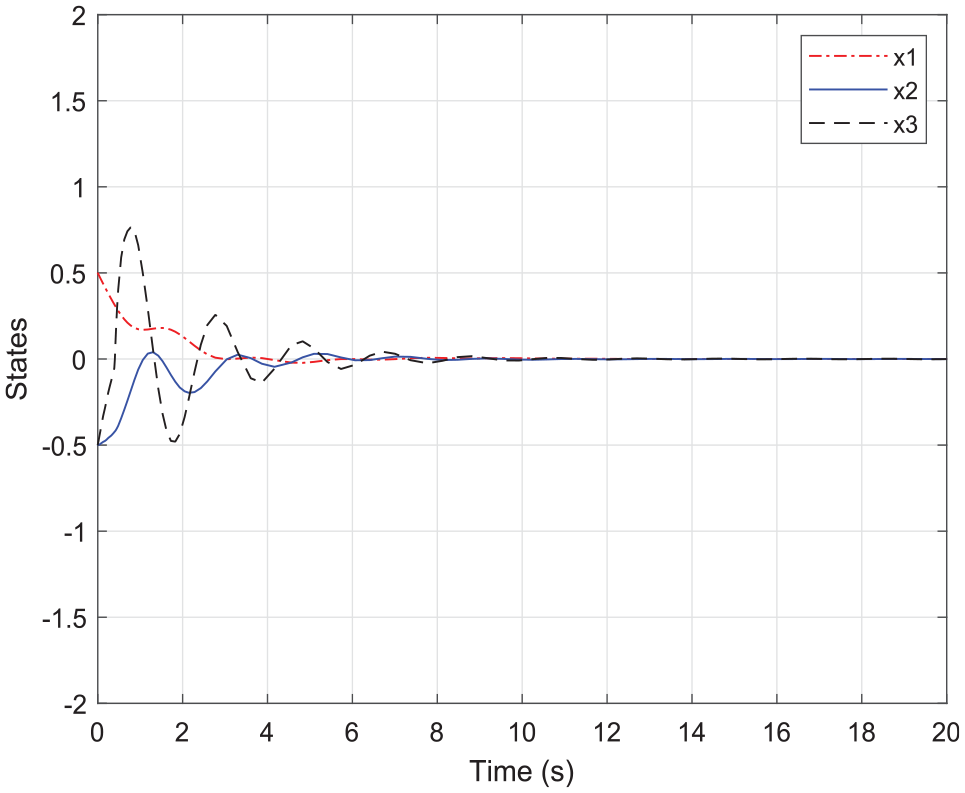
(a) The control signal
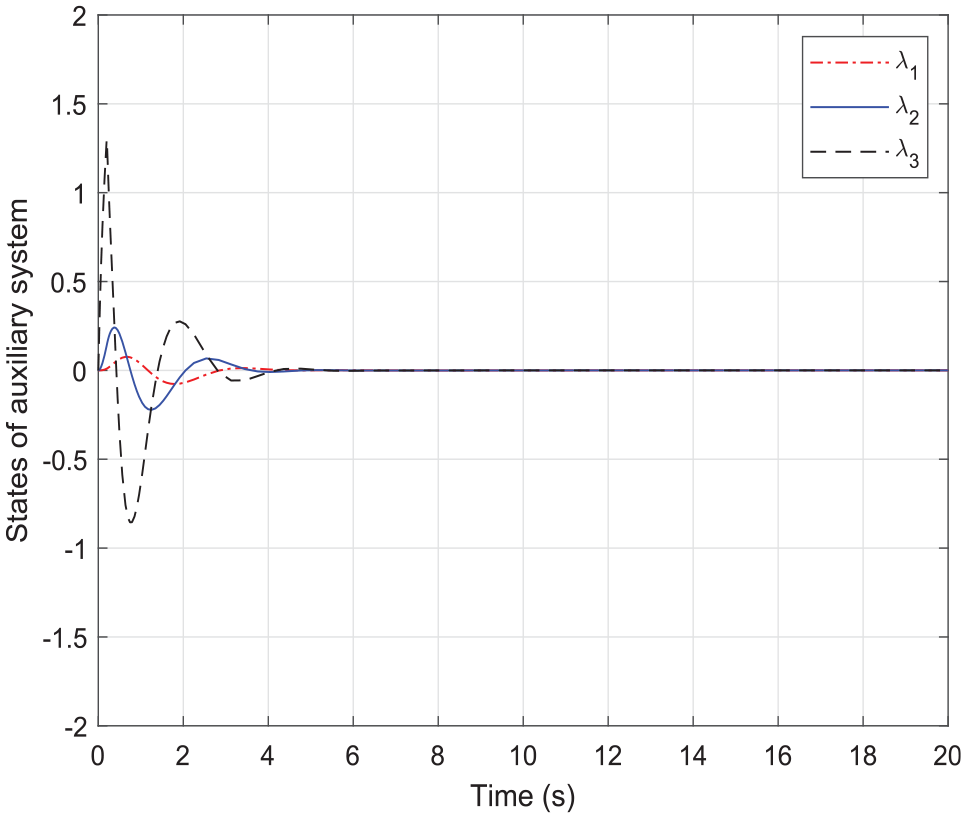
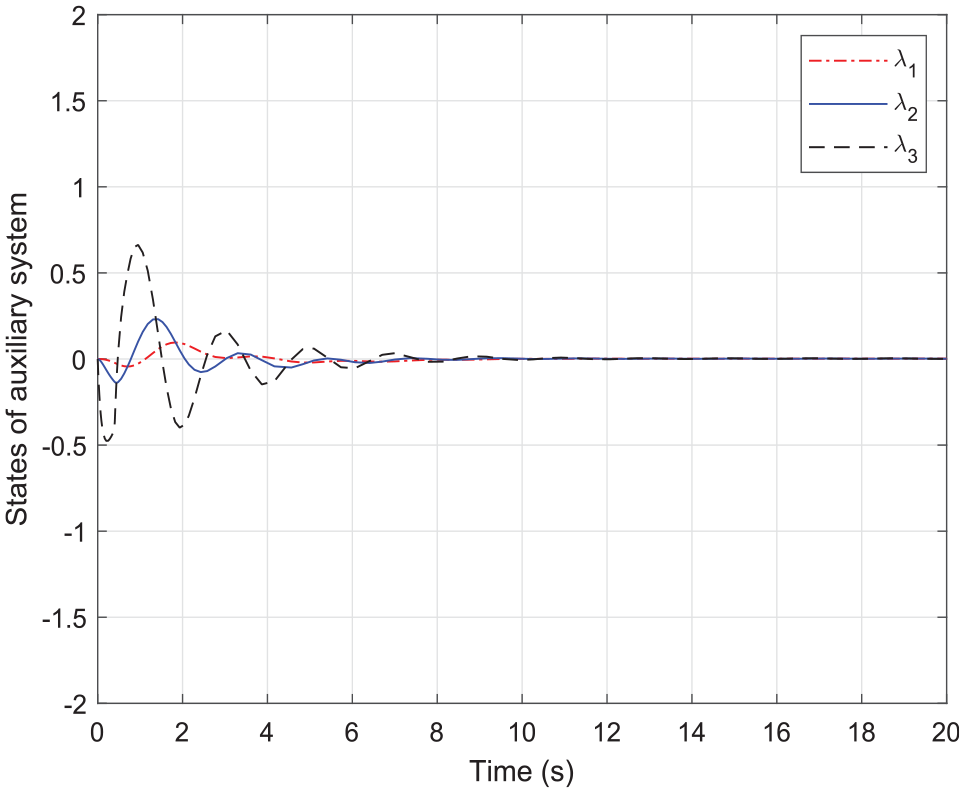
The states

where
Let
For the above system, an appropriate controller is designed to ensure that all the closed-loop signals are bounded in probability. According to the above introduction, the corresponding auxiliary system, virtual control
The simulation results are depicted in Figures 5–7. Similar to Example 1, the simulation results show that all the closed-loop signals are bounded in probability, which further proves the effectiveness of the proposed control strategy.
The trajectories of system states
(a) The control signal
The states
Conclusion
In this paper, an adaptive neural control strategy was designed for a class of non-strict feedback stochastic nonlinear systems with input delay, in which RBF NN was introduced to model the uncertain nonlinear functions. Then, a suitable auxiliary system was implemented to compensate for the effect of input delay. Moreover, by means of the structural characteristics of RBF NN, the controller’s design difficulty of non-strict feedback form was reduced. Meanwhile, the proposed adaptive controller secured that all the closed-loop signals remain bounded in probability. And the effectiveness of the constructed control scheme was further verified by two simulation examples.
Footnotes
Acknowledgements
The authors would like to thank the editors and anonymous reviewers for their valuable suggestions about this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.