In the process of guide roller transmission, the geometric nonlinearity caused by the lateral vibration of the flexible electronic membrane will result in the divergence and instability of the membrane velocity, thus affecting the printing accuracy. In this paper, in order to engineer the exact condition that affecting the printing accurancy, the Elliptic integral method, whose effectiveness has been verified for its soluted result, is consistent with the one concluded from L-P method and He's Frequency formula while soluting the nonlinear vibration equation, respectively, on basis of Von Karman’s large deflection theory and Hamilton’s principle, is mainly applied, and thus provide a theoretical support for the design and manufacture of high-precision flexible electronic printing press.
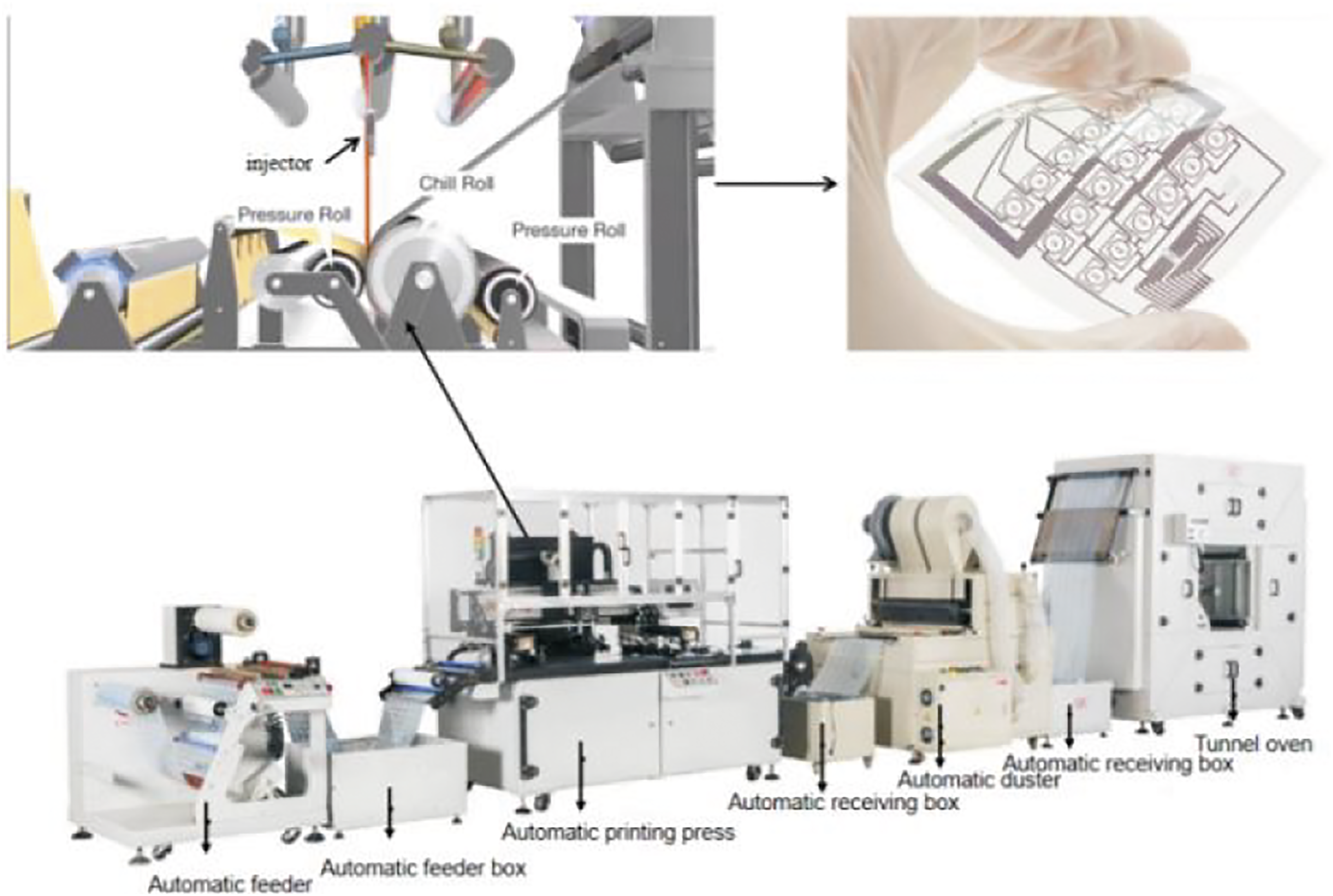
Flexible electronic membrane materials1–5 are widely used in electronic products and people’s demand for flexible electronic membrane materials is daily increasing. The flexible electronic membrane will be pre-tensioned by the guide roller inside the automatic printing machine during the transmission process (as shown in Figure 1).
Shaanxi People B624 Flexible Press.
Chinese scholar Chen LQ6–8 systematically studied the nonlinear vibration of string, beam, and ring. Nosier9 studied the influence of material properties and boundary conditions on the vibration characteristics of solid circular plate by establishing a dynamic model of functionally graded circular plate under transverse mechanical load. Huang JL10 proposed a new incremental harmonic balance method to study the quasi periodic motion of an axially moving beam, which is verified the effectiveness by comparing the frequency and amplitude. Tornabene F11 established the governing equation of the thin shell by using Hamilton’s principle and get it solved by using the generalized differential quadrature method. MH Ghayesh12 obtained the nonlinear dynamic equation of the forced motion of the axially moving plate based on the energy method. Li HY13 established the motion equation based on the classical thin plate theory, which is discretized by the Galerkin method and solved by using the multi-scale method to obtain the frequency response equation under the steady motion condition. RM Soares14 established a nonlinear static model of pre stretched hyperelastic annular membrane under finite deformation. Li MZ15 analyzed the free vibration of functionally graded plates with simply supported boundary conditions. Based on Hamilton principle, the governing differential equations and boundary conditions were derived. Ke LL16 studied the nonlinear free vibration of beam and obtained the influence of volume fraction, amplitude, and slenderness ratio on the nonlinear free vibration of beam. Feng C17 established the nonlinear free vibration equation of composite beam, and calculated the vibration frequency and amplitude of the beam by using Ritz method. Wang YB18 used Hamilton principle to obtain the equation of a beam under axial time-varying load. He Jihuan has done a lot of work on the stability of nonlinear vibration equations by using He-Laplace method19 and Homotopy Perturbation Method.20
To sum up, previous studies rarely considered the large deformation of the middle surface of the flexible electronic membrane caused by the pre-tension of the roller, and as well failed to offer the actual motion speed of the flexible electronic membrane while dimensionless method is adopted to solute the motion equation.
Establishment of dynamic model
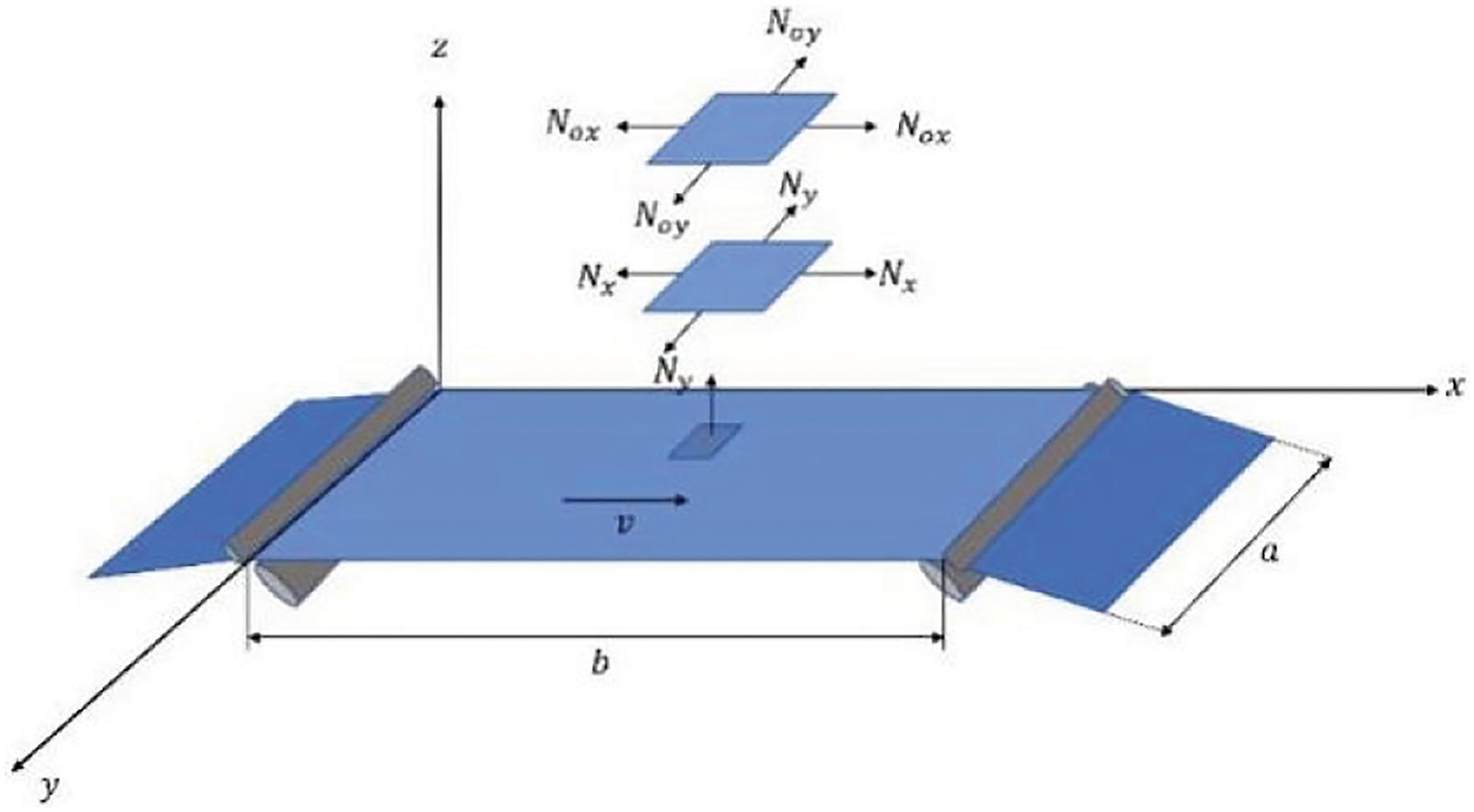
Figure 2 shows the dynamic model of flexible electronic membrane, where and show the pulling force in and , respectively, of the guide roller during its transmission process. and show the tension caused by the large deflection deformation because of the transverse vibration within membranes. denotes the longitudinal length of the membrane, a denotes the width, and denotes the longitudinal transmission velocity.
Dynamic model of flexible electronic membrane.
According to Von Karman’s large deflection theory, the vibration equation and compatibility equation of flexible electronic membrane subjected to the pretension are
Substituting equations into (1) and (2), we have Separating variables, we obtain
Substituting equations (5) and (6) into equation (4) yields
The modes corresponding to different frequencies are orthogonal, we multiply
When , we have
He’s Frequency Formula
Here, L-P perturbation method is compared with He’s frequency formula.21 The square of its frequency can be obtained, which is
where is the amplitude,
when , the frequency of equation (19) is easily obtained as follows
When , equation (47) is equivalent to that obtain by L-P Perturbation Method. When we increase the size of N in equation (46), the calculation accuracy of frequency can be improved.
When , it can be obtained by integrating equation (19)
We assume the initial conditions: , =0. By integrating equation (48), we obtain
When , We obtain
Substituting equations (50) into equation (49), We also get the solution of equation (19)
The integral of equation (52) is obtained as follows
Bring above in the following formula
When , the vibration period is obtained
Then the vibration frequency is
Namely,
Numerical calculation
Taking Shaanxi People B624 high-precision flexible electronic printing press as the research object, its parameters are shown in Table 1.
Basic parameters of Shaanxi People B624 High-Precision Flexible Electronic Printing Press.
printed material
membrane length b (m)
membrane width a (m)
Density (Kg/m2)
Elastic modulus E
Maximum transverse and longitudinal tension N0xN0Y(N/m)
TPU membrane
2
1.25
1.7
0.9*109
120
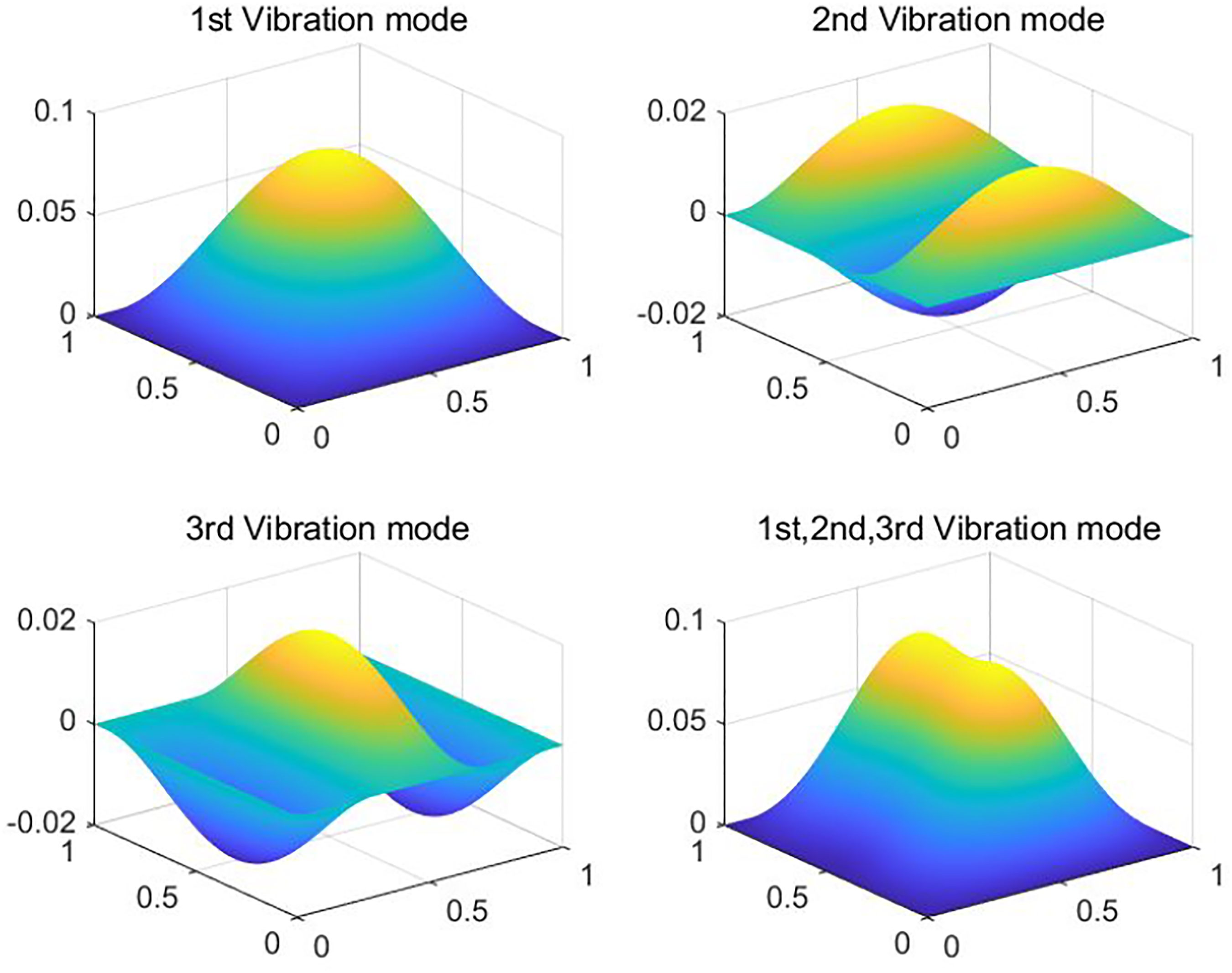
Use the formula (43) obtained by L-P perturbation method, taking , as well as ,, , and to calculate the first three modes of flexible electronic membrane.
The first mode shape: .
The second mode shape: .
The third mode shape: .
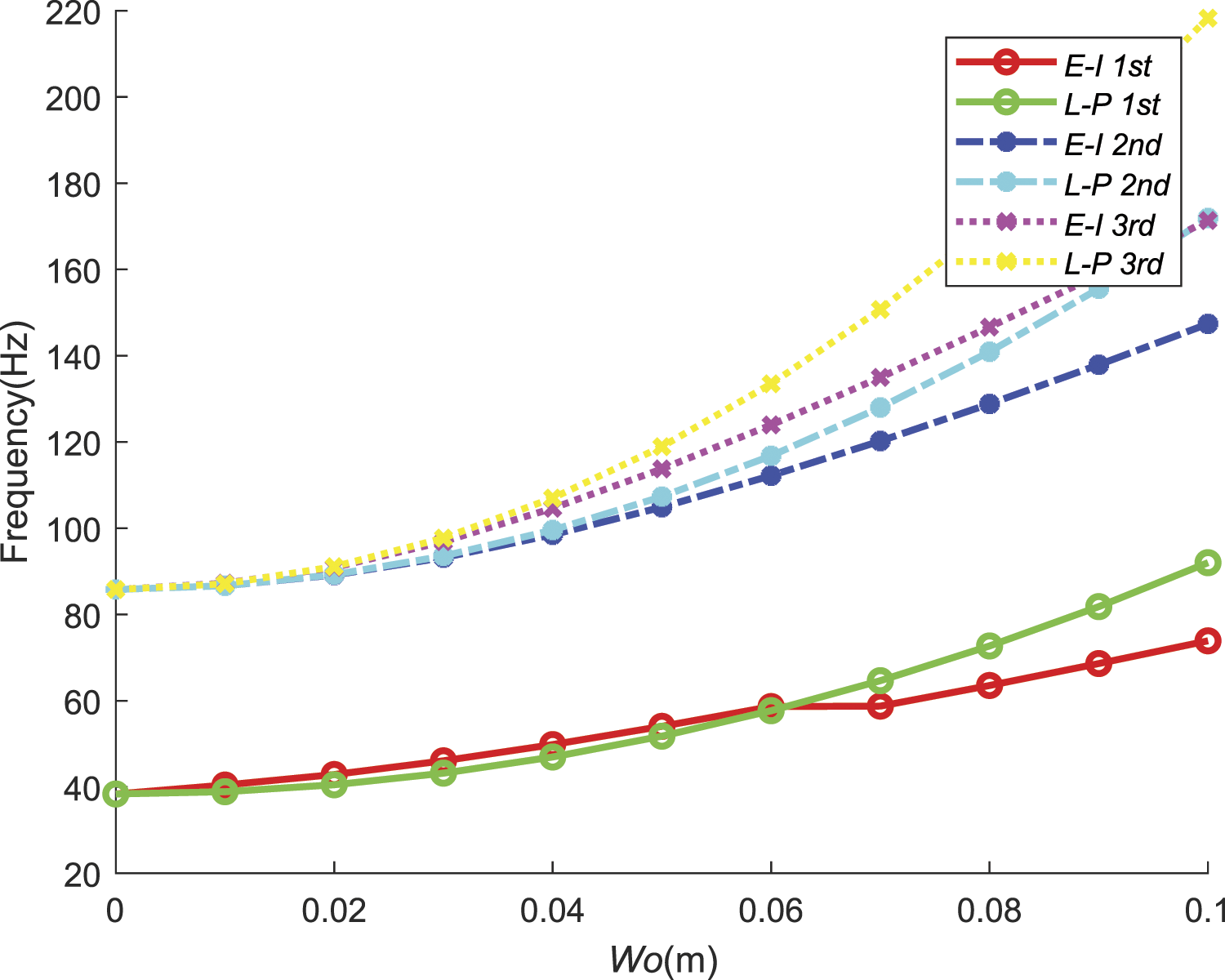
From Figure 3, we can see that with the increase of mode order, the amplitude of flexible electronic membrane gradually decreases, and the total modes present the saddle surface. The amplitude of the first mode decreases compared with the second mode. The results show that the L-P perturbation method is effective. From Figure 4, we calculate the first three order vibration frequencies of flexible electronic membrane by using the L-P perturbation method and the Elliptic Integral method, respectively. The vibration frequency of the membrane decreases with the decrease of mode. The horizontal ordinate is the initial amplitude and the longitudinal coordinates is the frequency. By comparison, it can be seen that with the change of initial displacement, when tends to 0, the first three order frequencies obtained by the two methods will converge to 38.37 Hz, 85.79 Hz, and 85.79 Hz. The values obtained by both methods converge. It is proved that the properties of equation (42) and equation (49) are the same.
The first three modes of L-P perturbation method.
Comparison of the first three frequencies obtained by L-P perturbation method and Elliptic Integral method.
Analysis of the calculation results
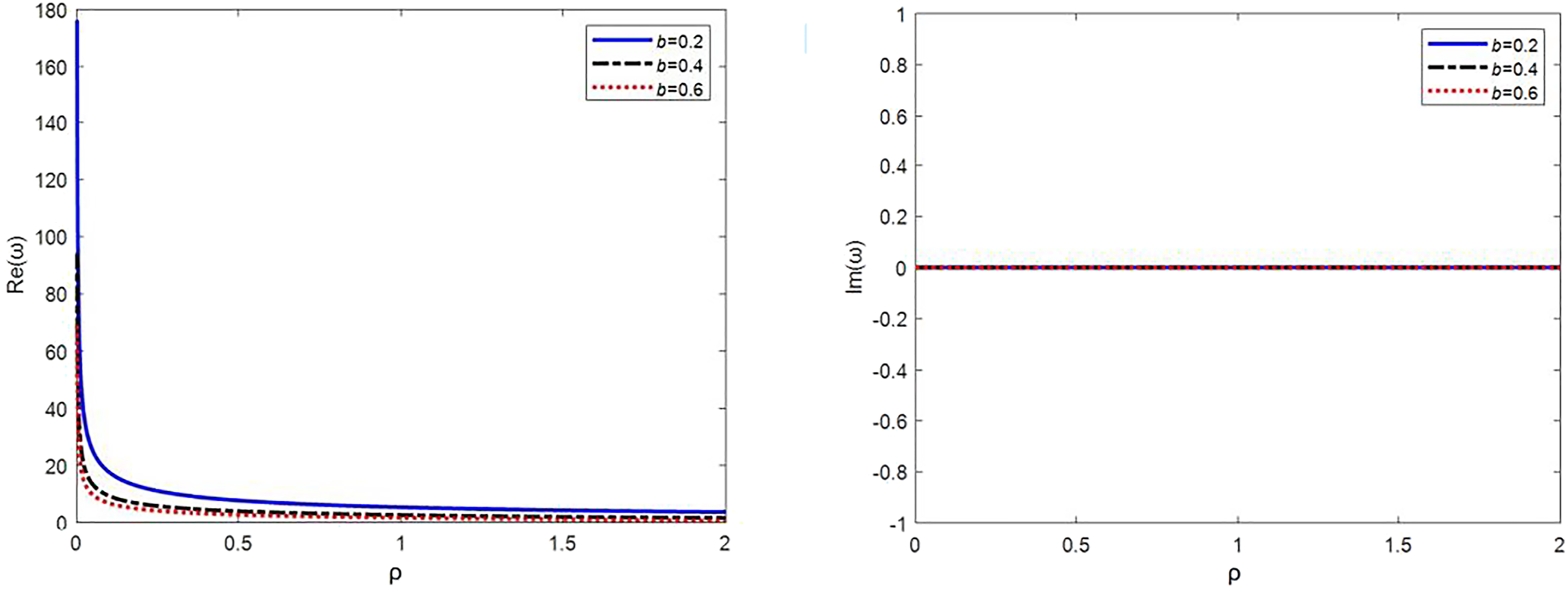
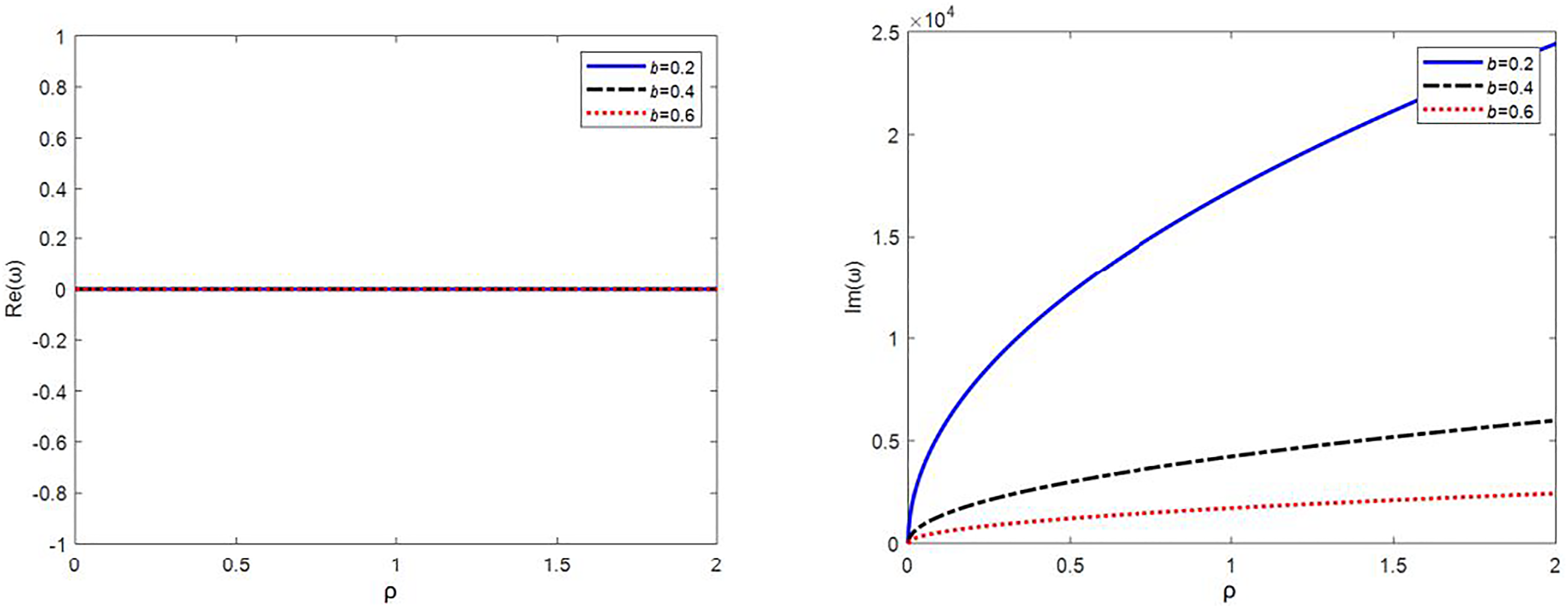
In the process of membrane production, the guide roller length and membrane density have a great influence on the nonlinear vibration of membrane, so these two quantities are taken to study the nonlinear vibration of membrane on the basis of equation (49). When setting , respectively, and other parameters , Figure 5 shows the relationship between density coefficient and complex frequency . With the increase of membrane length , the real part of the complex frequency of the membrane becomes smaller, the imaginary part tends to 0, and the membrane remains in a stable working state. This shows that by increasing the membrane length , it will reduce the real part of the complex frequency of the system, so it is necessary to control the length .
Relation curve between complex frequency and density with different membrane width .
Figure 6 shows the relationship between the complex frequency and the density coefficient, subject to the condition that the initial amplitude and other parameters remain unchanged. With the growing of the initial amplitude, the real part of the dimensionless complex frequency of the membrane tends to 0, the imaginary part diverges, and the membrane becomes unstable. This indicates, the increase of the initial amplitude will make the membrane into the unstable working state in advance, so the initial amplitude should be controlled.
Relation curve between complex frequency and density with different membrane width .
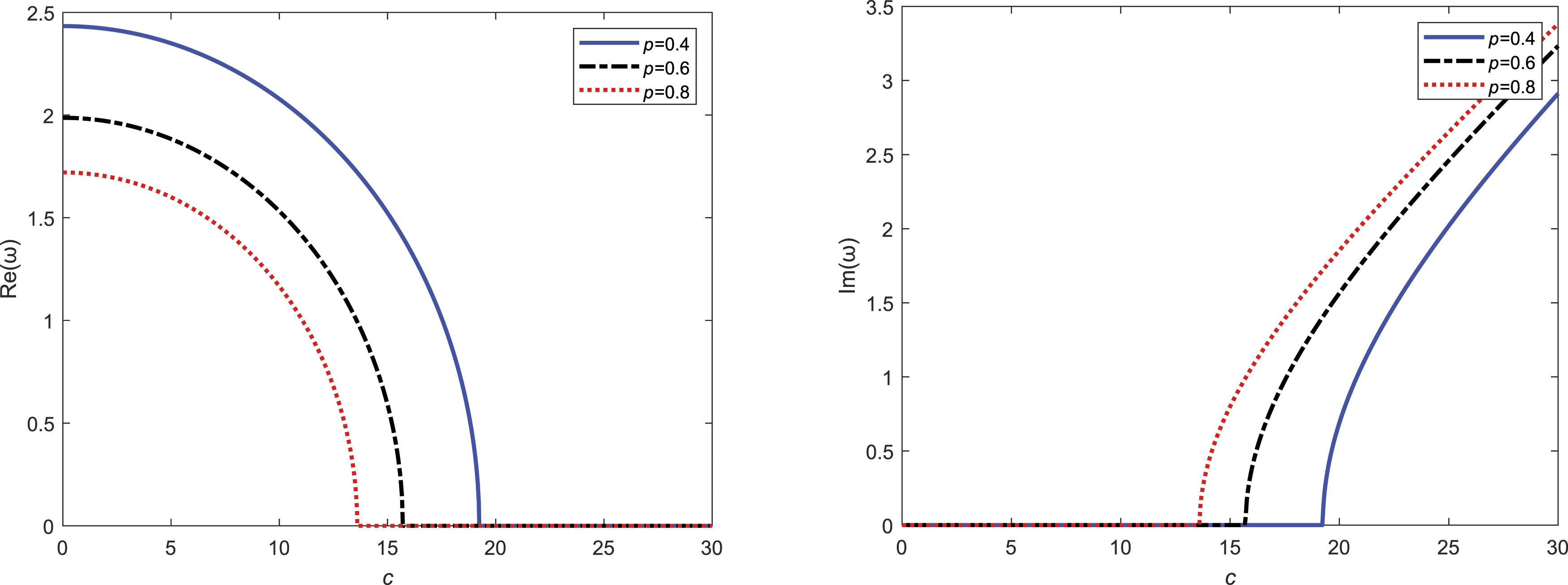
Taking a further step, we continue to study the influence of membrane density on system vibration. As with and other parameters as , the relation curve between complex frequency and velocity is shown in Figure 7. When , , , the maximum velocity of moving membrane is accordingly , , and . With the increase of membrane density, the critical velocity of moving membrane decreases.
Relation curve between complex frequency and velocity with different membrane density .
Conclusion
Considering the additional tension, the nonlinear dynamic model of flexible electronic membrane is established. The following conclusions are obtained:
1. The initial amplitude of the membrane should be controlled in the motion process. as the increase of the initial amplitude will make the flexible electronic membrane unstable, and the imaginary part of the complex frequency will always increase, which makes the membrane system divergent and unstable.
2. The increase of length b—the distance between guide rollers—will reduce the film complex frequency and make the system enter into the unstable working state in advance. Therefore, it is necessary to control this distance in the design of high-precision printing press.
3. The increase of the density of flexible electronic membrane will lead to the decrease of the working speed of the coater machine. When , , , , and , the coater machine can reach the maximum working speed of .
This paper mainly discuss the influence of length and membrane density on the vibration of flexible electronic membrane, and thus determine the maximum working speed of flexible electronic printing equipment, which provides a theoretical basis for the structural design of flexible electronic printing press.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The author gratefully acknowledges the support of the National Natural Science Foundation of China (No. 52075435) and the Natural Science Foundation of Shaanxi Province (No. 2021JQ-480,2020JM-457).
ORCID iDs
Yao Feng
Mingyue Shao
References
1.
ParkSVosguerichianMBaoZA. A review of fabrication and applications of carbon nanotube membrane-based flexible electronics. Nano Scale2013; 5(5): 1727–1752.
2.
KooMParkK-ILeeSH, et al.Bendable inorganic thin-film battery for fully flexible electronic systems. Nano Lett2012; 12(9): 4810–4816.
3.
ZardettoVBrownTMRealeA., et al.Substrates for flexible electronics: a practical investigation on the electrical, film flexibility, optical, temperature, and solvent resistance properties. J Polym Sci B: Polym Phys2011; 49(9): 638–648.
4.
HeremansPTripathiAKde Jamblinne de MeuxA., et al.Mechanical and electronic properties of thin-film transistors on plastic, and their integration in flexible electronic applications. Adv Mater2016; 28(22): 4266–4282.
5.
LiuYZhouHChengR., et al.Highly flexible electronics from scalable vertical thin membrane transistors. Nano Lett2014; 14(3): 1413–1418.
6.
ChenL-Q. Analysis and control of transverse vibrations of axially moving strings. Appl Mech Rev2005; 58(2): 91–116.
7.
ChenL-QYangX-D. Steady-state response of axially moving viscoelastic beams with pulsating speed: comparison of two nonlinear models. Int J Sol Structures2005; 42(1): 37–50.
8.
ChenL-QZhangN-HZuJW. The regular and chaotic vibrations of an axially moving viscoelastic string based on fourth order Galerkin truncaton. J Sound Vibration2003; 261(4): 764–773.
9.
NosierAFallahF. Non-linear analysis of functionally graded circular plates under asymmetric transverse loading. Int J Non-Linear Mech2009; 44(8): 928–942.
10.
HuangJLZhuWD. A new incremental harmonic balance method with two time scales for quasi-periodic motions of an axially moving beam with internal resonance under single-tone external excitation. J Vibration Acoust2017; 139(2): 1–15.
11.
TornabeneFViscotiMDimitriR, et al.Higher order theories for the vibration study of doubly-curved anisotropic shells with a variable thickness and isogeometric mapped geometry. Compos Structures2021; 267: 113829.
LiHYLiJLangTY, et al.Dynamics of an axially moving unidirectional plate partially immersed in fluid under two frequency parametric excitation. Int J Non-Linear Mech2018; 99: 31–39.
14.
SoaresRMGonçalvesP. Nonlinear vibrations and instabilities of a stretched hyperelastic annular membrane. Int J Sol Struct2012; 49(3): 514–526.
15.
LiMYanRGuedes SoaresC. Free vibration of advanced composite plates using a new higher order shear deformation theory. Eur J Mech - A/Solids2021; 88: 104236.
ChuangFKitipornchaiSJieY, et al.Nonlinear free vibration of functionally graded polymer composite beams reinforced with graphene nanoplatelets (GPLs). Eng Struct2017; 140: 110–119.
18.
WangYZhuW. Nonlinear transverse vibration of a hyperelastic beam under harmonic axial loading in the subcritical buckling regime. Appl Math Model2021; 94: 597–618.
19.
HeJ-HMoatimidGM.MostaphaDR. Nonlinear instability of two streaming-superposed magnetic Reiner-Rivlin Fluids by He-Laplace method. J Electroanalytical Chem2021; 895: 115388.
20.
HeJ-HMostaphaDR. Insight into the significance of hall current and joule heating on the dynamics of Darcy-Forchheimer peristaltic flow of Rabinowitsch fluid. J Math2021: 2021: 1.
21.
HeJ-HYangQHeHeC-H, et al.A simple frequency formulation for the tangent oscillator. Axioms2021; 10(4): 320.