
Abstract
Generally, the synchronization studies on two or multiple exciters are preconditioned by being a single frequency, while the multiple-frequency synchronization problems in a vibrating system, including double-frequency and triple-frequency, are less considered, which are also very significant in engineering. This paper attempts to solve this issue by considering a dynamical model with an isolation frame, driven by the four exciters. The synchronization for the four exciters and its stability under the double-frequency and triple-frequency conditions are studied in detail. Firstly, the mathematical modeling of the system is established, and the corresponding motion differential equations are derived. Using the asymptotic method and the average method, yields the theoretical condition of implementing multiple-frequency synchronization, and the theoretical condition for stability of the system complies with the Routh–Hurwitz criterion. The dynamic characteristics of the system, including stable phase differences, stability abilities, responses of the system, and relative motion relationship, are qualitatively discussed by numeric. Finally, simulations are performed by applying a Runge–Kutta program to validate the theoretical and numerical qualitative results. It is shown that, by reasonably matching the key parameters of the system, the stronger, stable, and valuable motion states of vibrating machines, including vibration amplitudes, frequencies, and motion trajectory, can be realized, which are exactly the desires in engineering.
Keywords
Introduction
Synchronization as a common phenomenon in nature exists widely in human life and production, such as: synchronous satellites, pendulum clock, neuronal networks, coupling oscillators, self-sustained electromechanical devices, and so on.1–4 Researches for synchronization have a long history, as early as the 1960s, Blekhman5,6 first gave the theoretical explanation on synchronization of two identical exciters (unbalanced rotors driven by motors separately) by using the method of direct separation of motion. Inoue 7 studied the synchronization of a mechanical system with multiple cycles. Subsequently, Wen8,9 applied such theory to engineering and established a branch of vibration utilization engineering, and invented plenty of self-synchronous vibrating machines. In the year of 2005, Acebrón et al. 10 applied the Kuramoto model to propose more detailed analyses of the synchronization problem for the cluster oscillator. Perlikowski et al. 11 described the relationship between the full synchronization of the response oscillator and the generalized synchronization of a driving system. Besides, Balthazar et al.12,13 gave a brief review of self-synchronization of two or four non-ideal exciter by numerical simulations, and a special phenomenon called “sommerfeld effect” was discussed. The synchronization problem of flow shop was studied by Bultmann, 14 which improved the working efficiency of the machines.
Since the concept of synchronization is put forward and developed, vibratory synchronization theory has a wide range of applications in engineering, especially in materials screening and transportation, including vibrating screens, vibrating feeders, vibrating dryers, and conveyors, etc. Currently, many vibrating machines are driven by double motors, which take advantage of motion form of the system in the far super-resonant state.
The synchronization problems of two or more than two exciters with the same driving frequencies have been investigated by many scholars. For example, the synchronization of two eccentric rotors driven by hydraulic motors was given by Zhang. 15 Fang et al.16,17 studied the synchronization characteristics of the two exciters in the rotor-pendulum system. Considering the synchronization problem of the two eccentric rotors with common rotational axis, Chen 18 gave its theory and experiment analysis. Combining the vibratory synchronization with controlled synchronization, the composite synchronization of the four eccentric rotors was investigated by Kong. 19 Zhang et al.20–22 studies the stability of three homodromy exciters, revealed the Sommerfeld Effect of a vibrating system with two vibrators, and gave the synchronization of rollers driven by two vibrators considering the dry friction effect.
In engineering, the multiple-frequency synchronization of multiple exciters, driven separately by multiple motors, has also very high applicable value. For example, some new types of vibrating machines with different driving frequencies and different motion trajectories, can be designed, manufactured, and used in the industrial production process by utilizing the multiple-frequency synchronization theory, based on which the processing effect of materials is significantly improved, such as the compacting/polishing efficiency of vibrating machines driven synchronously by multiple frequencies is remarkably enhanced, etc.
In the previous literatures, the synchronization problem of two or multiple non-identical exciters which were powered by the same frequency in a vibrating system was studied well.15–22 However, theoretical problems for multiple-frequency synchronization are less considerations in the published literatures. To make up the above drawbacks, it is necessary to study the multiple-frequency synchronization (such as double-frequency or triple-frequency) of the multiple exciters, which aims at providing a theoretical foundation for designing some new types of vibrating machines with multiple driving frequencies.
In this paper, our attentions are restricted to a far super-resonant vibrating system [i.e., the operating frequency of system is about (3–10) times of its natural frequency], and taking a dynamical model with double rigid frames (RFs), and four counter exciters, for example, the double-frequency and triple-frequency synchronization and stability of the four exciters, will be investigated in detail, and some corresponding dynamic characteristics of the system are provided.
The structure of this paper is as follows: Firstly, the dynamic model and differential equations of motion of the system are given. In theoretical analyses of synchronization, the multiple-frequency synchronization theory of the system is analyzed. Double-frequency synchronization of the four exciters and triple-frequency synchronization of the four exciters are, respectively, devoted to deriving the conditions of implementing multiple-frequency synchronization and their stabilities. The synchronization and stability characteristics of the system are numerically discussed in the following. Simulation results are provided in Simulations. Finally, conclusions are presented.
Dynamical model and differential equations of motion of the system
A considered dynamical model is shown in Figure 1, which can represent a real application, that is, it can be seen as a core dynamical model of some new types of vibrating machines (such as vibrating compacting/polishing equipments in engineering). Dynamical model of a considered vibrating system.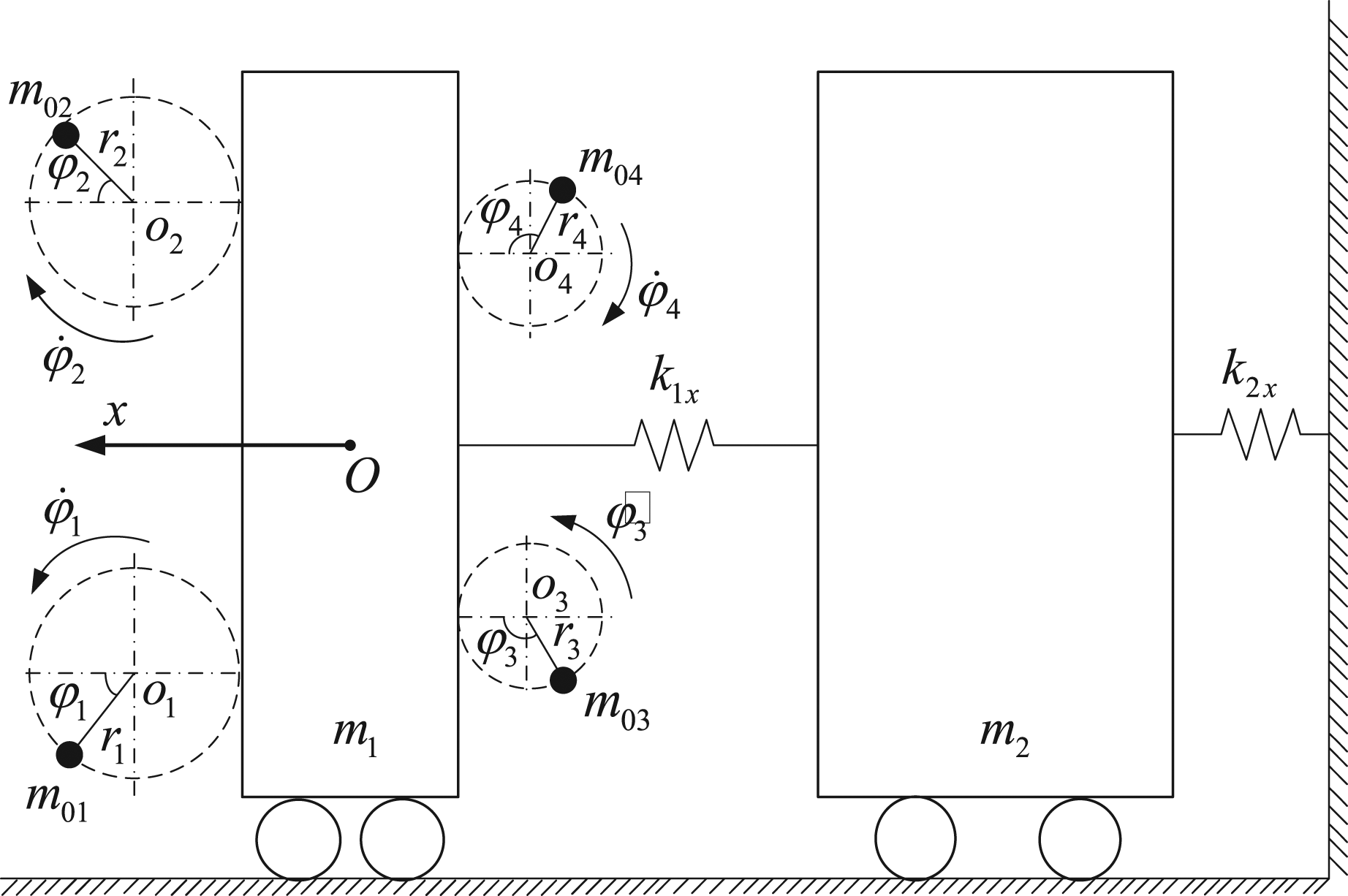
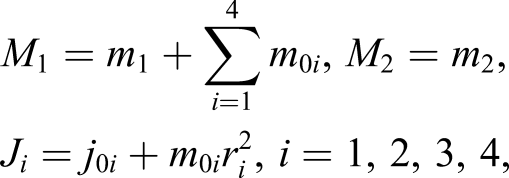
Figure 1 consists of the two RFs: the main vibrating RF1 (mass
Based on Lagrange equations, the differential equations of motion of the system can be obtained as follows:

Theoretical analyses of synchronization
Since the considered dynamical model not only is a system with small damping but also it operates in a far super-resonant state, so the second and third items on the left side of the equal sign in the first expression of equation (1) can be omitted. After the above treatment yields



The rotational phase angles are expressed as:


Substituting equation (4) into equation (2), yields

Equation (5) is the basic expression for exciters to reach synchronization. Since the equation obtained is not the standard form, we have to rearrange it into the Bogoliubov standard form.
23

Taking the derivation of
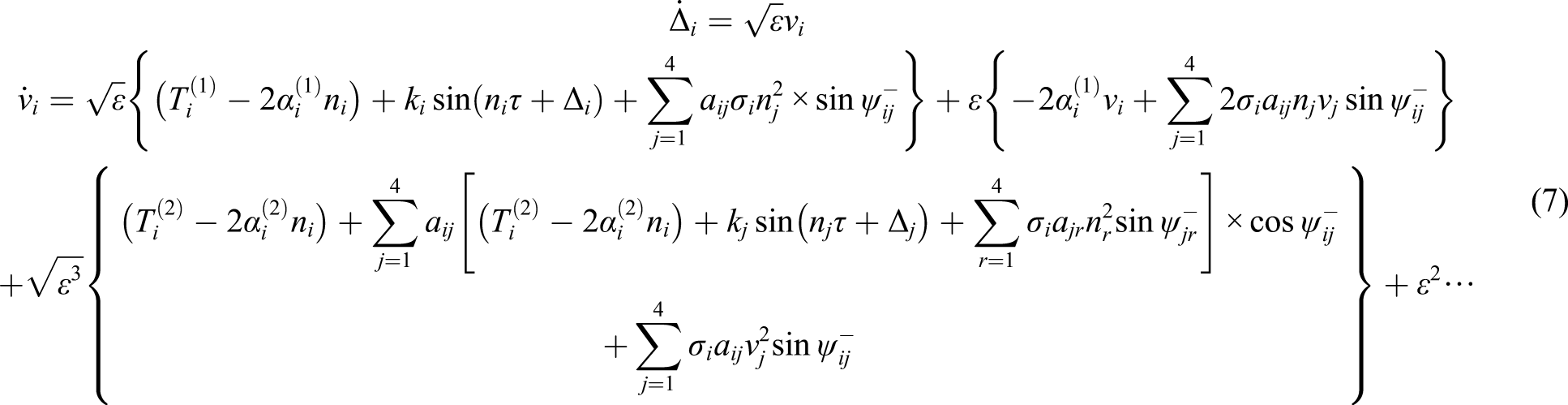
In the second expression of equation (7),



Similarly, the second approximate solution is improved,

Taking into account that the small vibration terms do not exert influence on the systematic change of
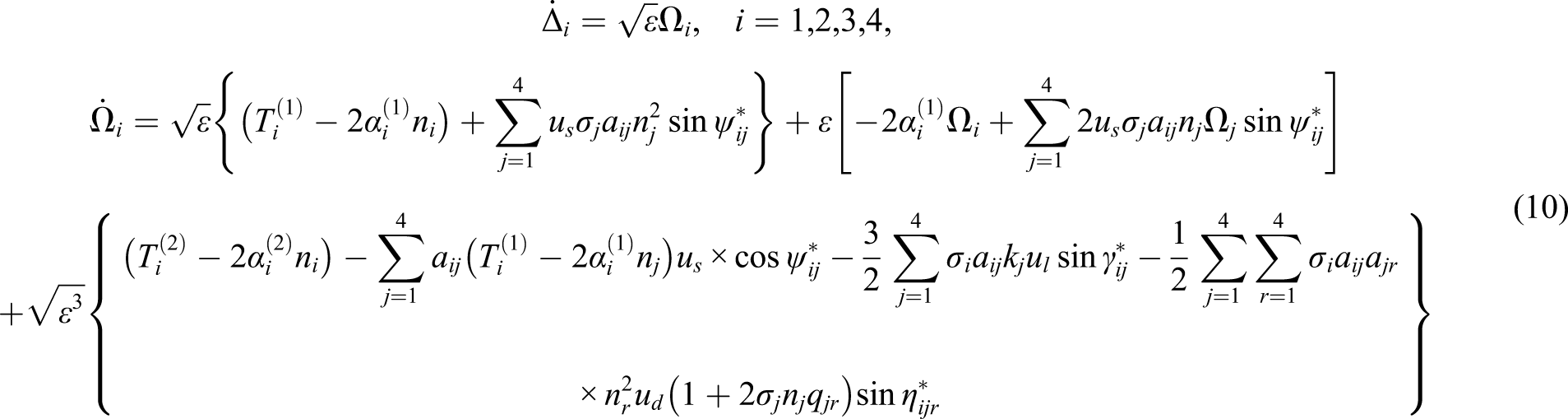



Here, the stable solutions are derived at
The items of

When the system is operating in the steady state, the expressions of the parameter in equation (11) are:

Therefore, the conditions for implementing the synchronization among exciters at the same frequency (speed ratio of 1:1) are:

Double-frequency synchronization of the four exciters
Synchronization criterion for double-frequency
When
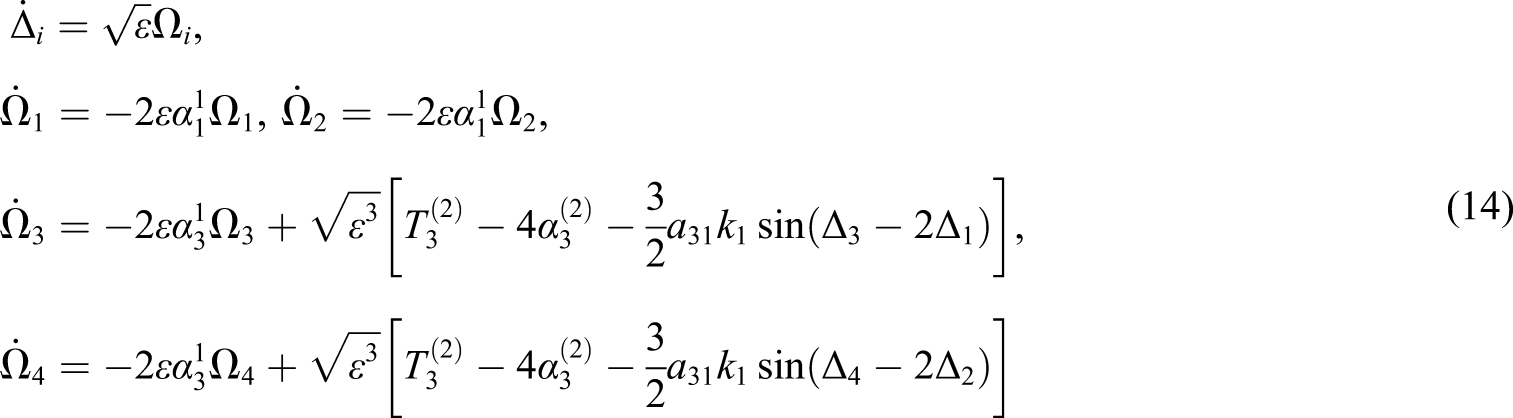
From equation (14), the conditions for double-frequency synchronization in the steady state can be written as:

Stability condition of the synchronous states for double-frequency
In order to get

Substituting equation (16) into equation (10) yields the differential expressions of the system:
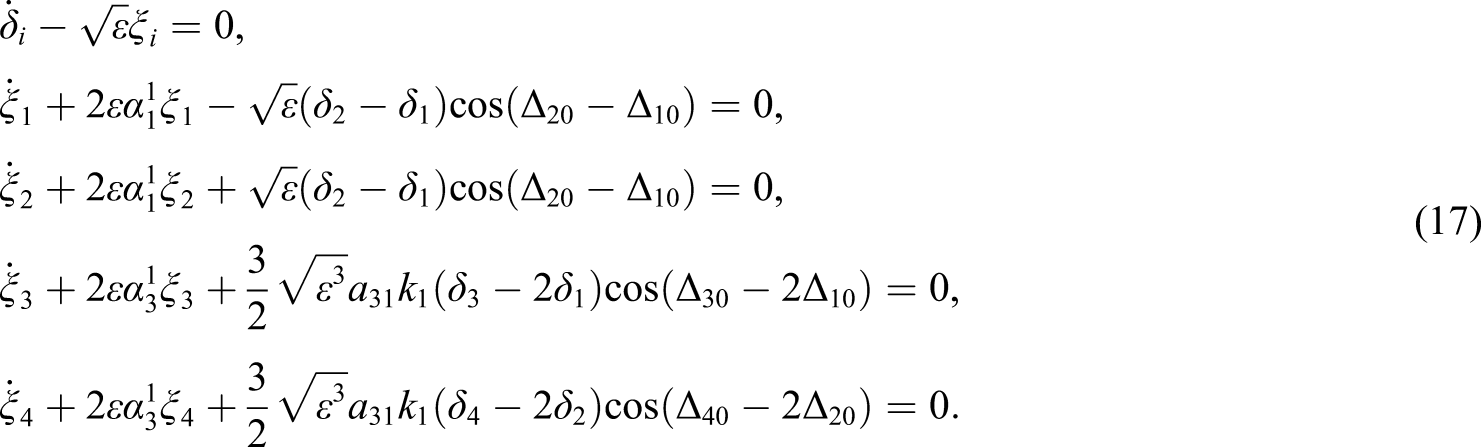
Arranging equation (17) yields the expressions of
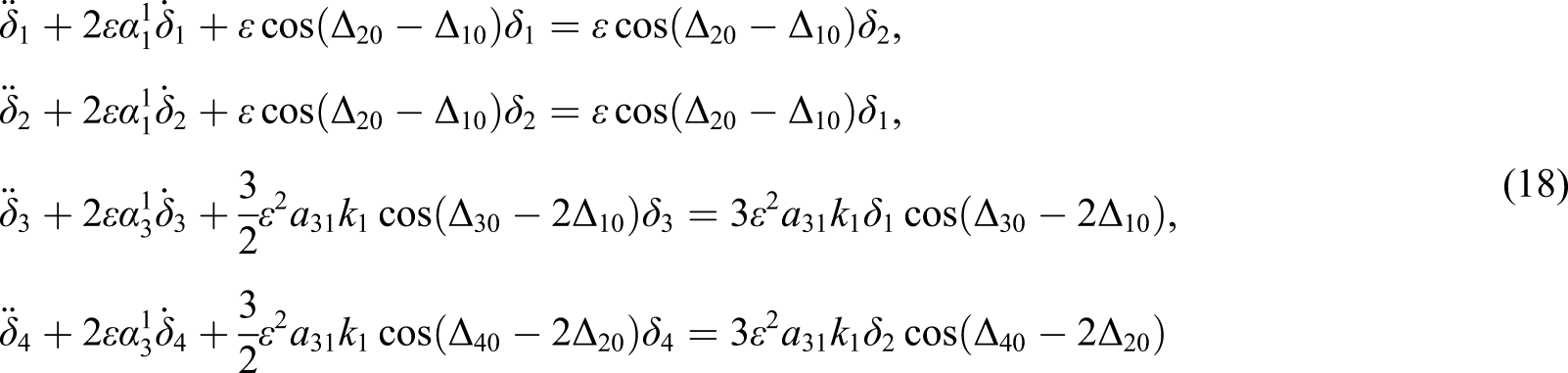
The characteristic equations of the eigenvalue
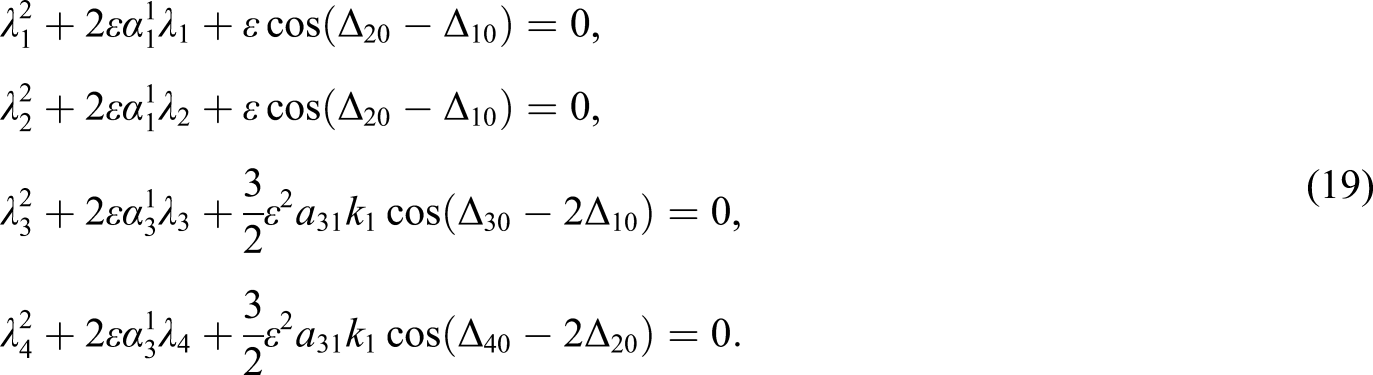
According to Routh-Hurwitz criterion, the following stability criterion is analyzed,

Combining equations (13), (15), and (21), the stable phase relationships among exciters, can be obtained,

Triple-frequency synchronization of the four exciters
Synchronization criterion for triple-frequency
When

In this case, the synchronization condition with a speed ratio of 1:3 can be written as:

Stability condition of the synchronous states for triple-frequency
Similar to the double-frequency synchronization analysis, the characteristic equations are derived as follows:

By applying Routh-Hurwitz criterion, the stability criterion of the synchronous states is obtained as:

Arranging and solving equation (26), yields

By combining equations (13), (24), and (27), the stable phase relationships among exciters can be obtained:

Numerical characteristic analyses based on the theoretical results
In order to clearly describe the dynamic characteristics of the system and qualitatively verify the above theoretical results, some numerical qualitative results are given in this section.
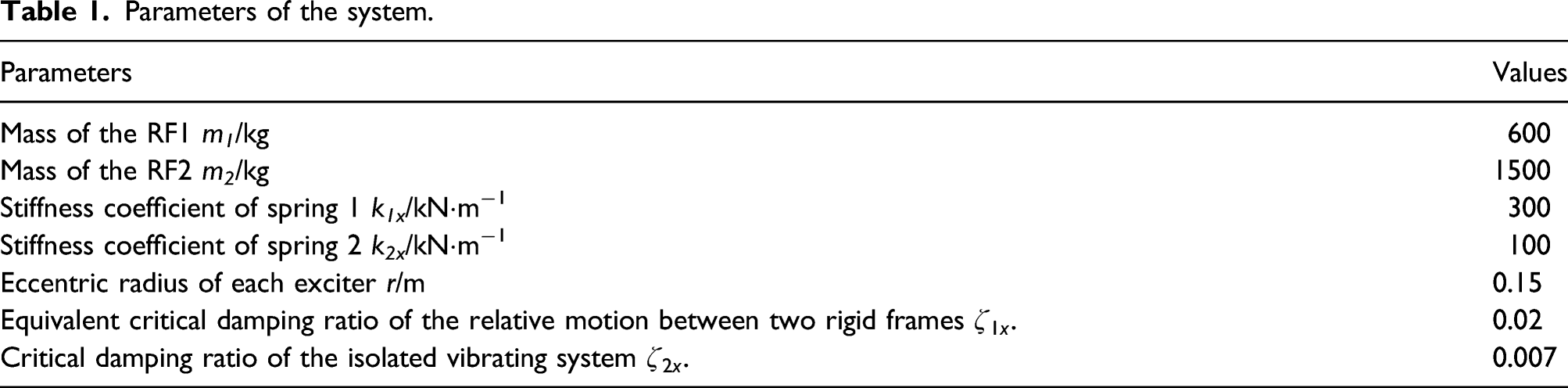
Parameters of the system.
According to the multiple-synchronization stability criterions, equations (20) and (26),
Figure 2 shows the plots of Curves of stability index versus operating frequency 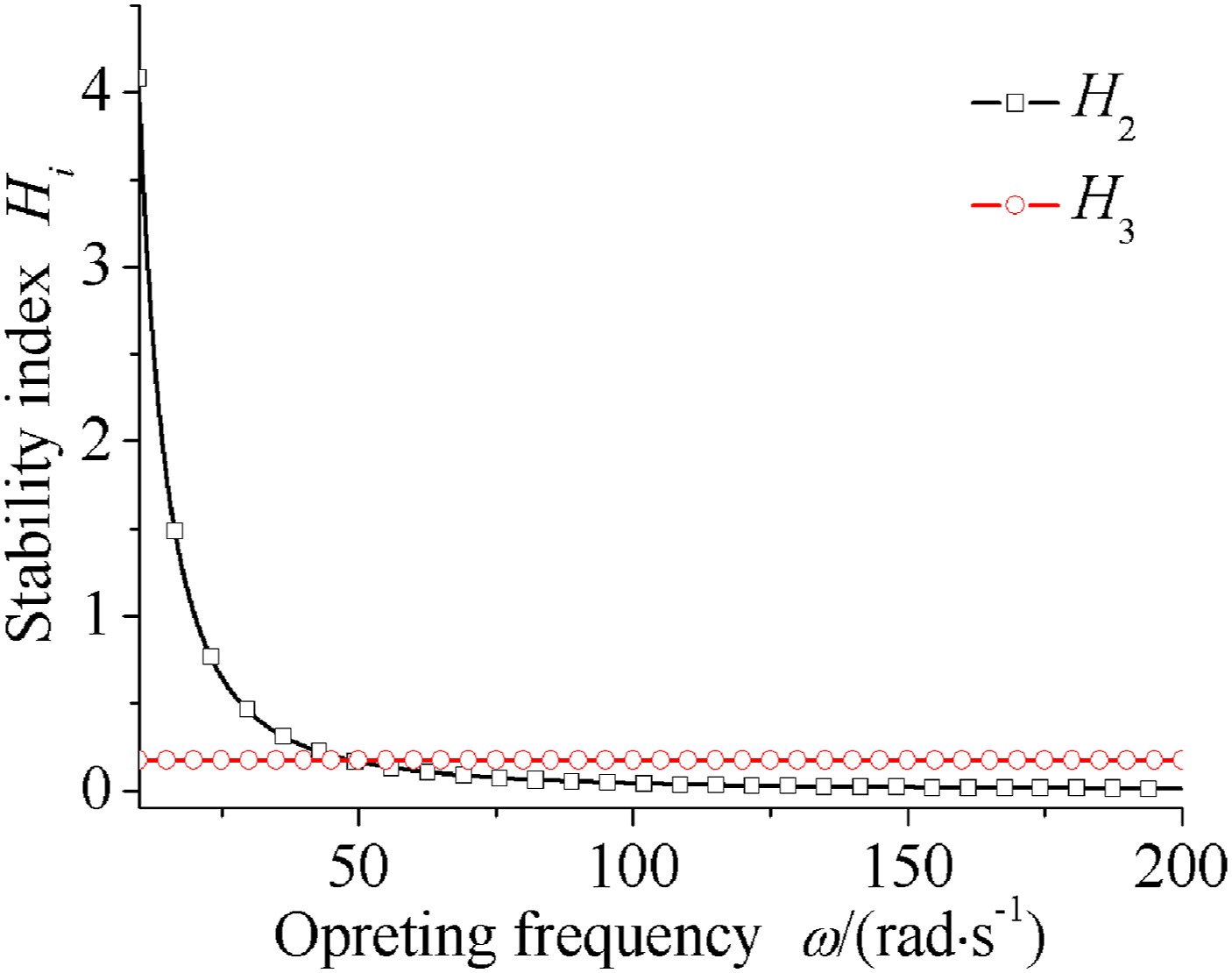
Changing the masses of the exciters obtains the curves of the double-frequency and triple-frequency synchronization stability index under different operating frequency conditions, as shown in Figure 3. It can be seen that the change of the value of Curves of stability index versus operating frequency for different 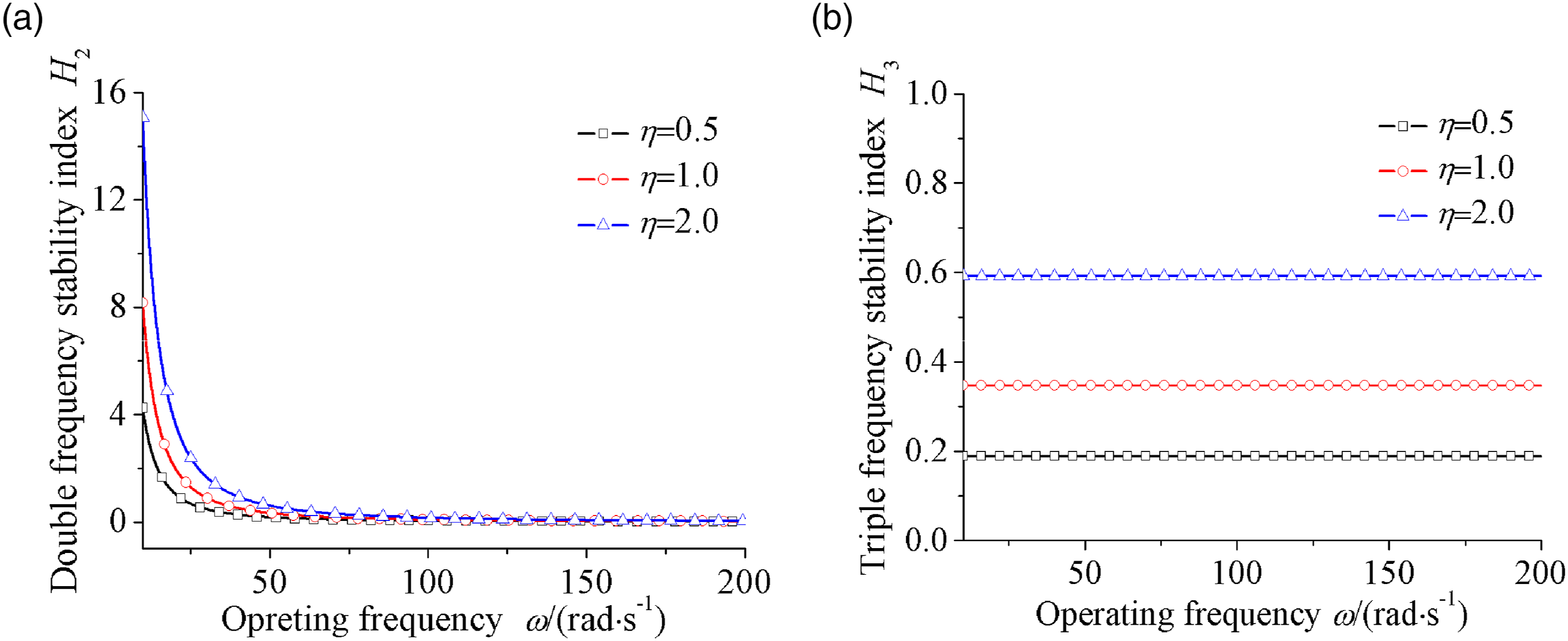
Simulations
The fourth-order Runge-Kutta program is applied to equation (1) to achieve the simulation results of the system, under the conditions of double-frequency and triple-frequency synchronization. The parameters are the same as that in Numerical characteristic analyses based on the theoretical results.
Simulations for double-frequency synchronization
During the process of simulations, adjusting the power supply frequencies of the motors can change the speeds of the motors.
The rotational speeds of motors are illustrated in Figure 4a. One can see that the speeds of motors 1 and 2 are stabilized at 1000 r/min, and the speeds of motors 3 and 4 are about 2000 r/min, so the system realizes the double-frequency synchronization, and the operating frequency Simulation results of the double-frequency synchronization for 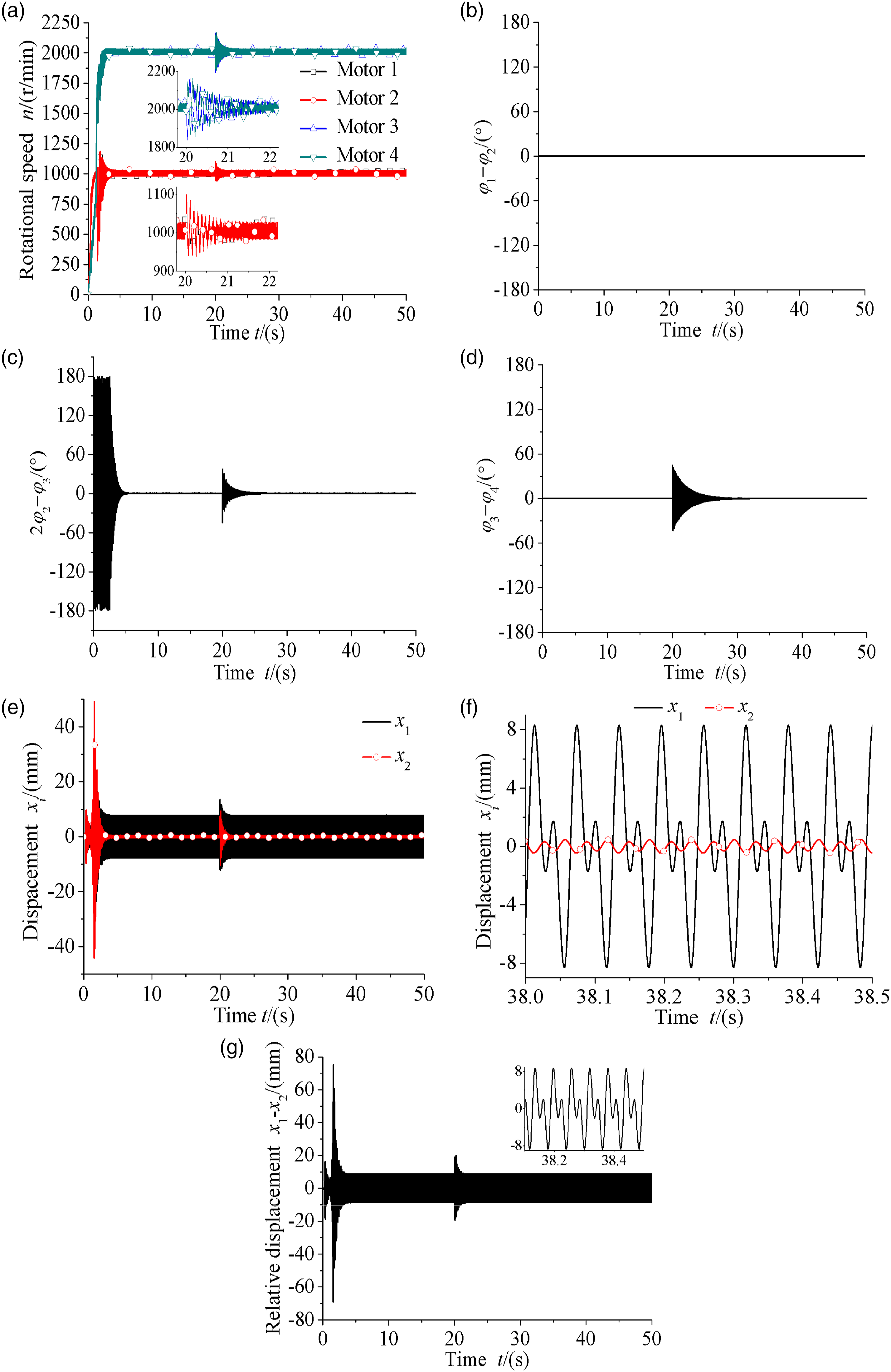
According to Figures 4b–d, the phase differences between arbitrary two exciters are all stabilized around 0°, and the transition time to achieve the steady state under the double-frequency synchronization is longer, which indicates that the double-frequency synchronization is more difficult to implement than fundamental frequency (the single frequency) synchronization. After adding a disturbance, the phase differences have some rapid fluctuations and then returns to their previous states, i.e., the stable value is the same as the previous one. The displacement response curves of the two RFs in x-direction are shown in Figure 4e. In Figure 4f, it can be clearly seen that the amplitude of the RF1 is larger, about 8.0 mm; while the vibration of the RF2 is relatively weaker, and the maximum displacement is around 0.5 mm.
According to Figure 4g, the relative displacement between two RFs can be obtained, which is about 8.5 mm in the steady state. The displacements of the two RFs are superimposed positively, and the motion form of the system is the relative motion with inverse phases.
Simulations for triple-frequency synchronization
The simulation results of the system under the triple-frequency condition can be seen in Figure 5. From Figure 5a, it can be seen that the speeds of motors 1 and 2 are stabilized at around 770 r/min, and the speeds of motors 3 and 4 are about 2300 r/min. The operating frequency is about 80.6 rad/s, and a disturbance of Simulation results of the triple-frequency synchronization for 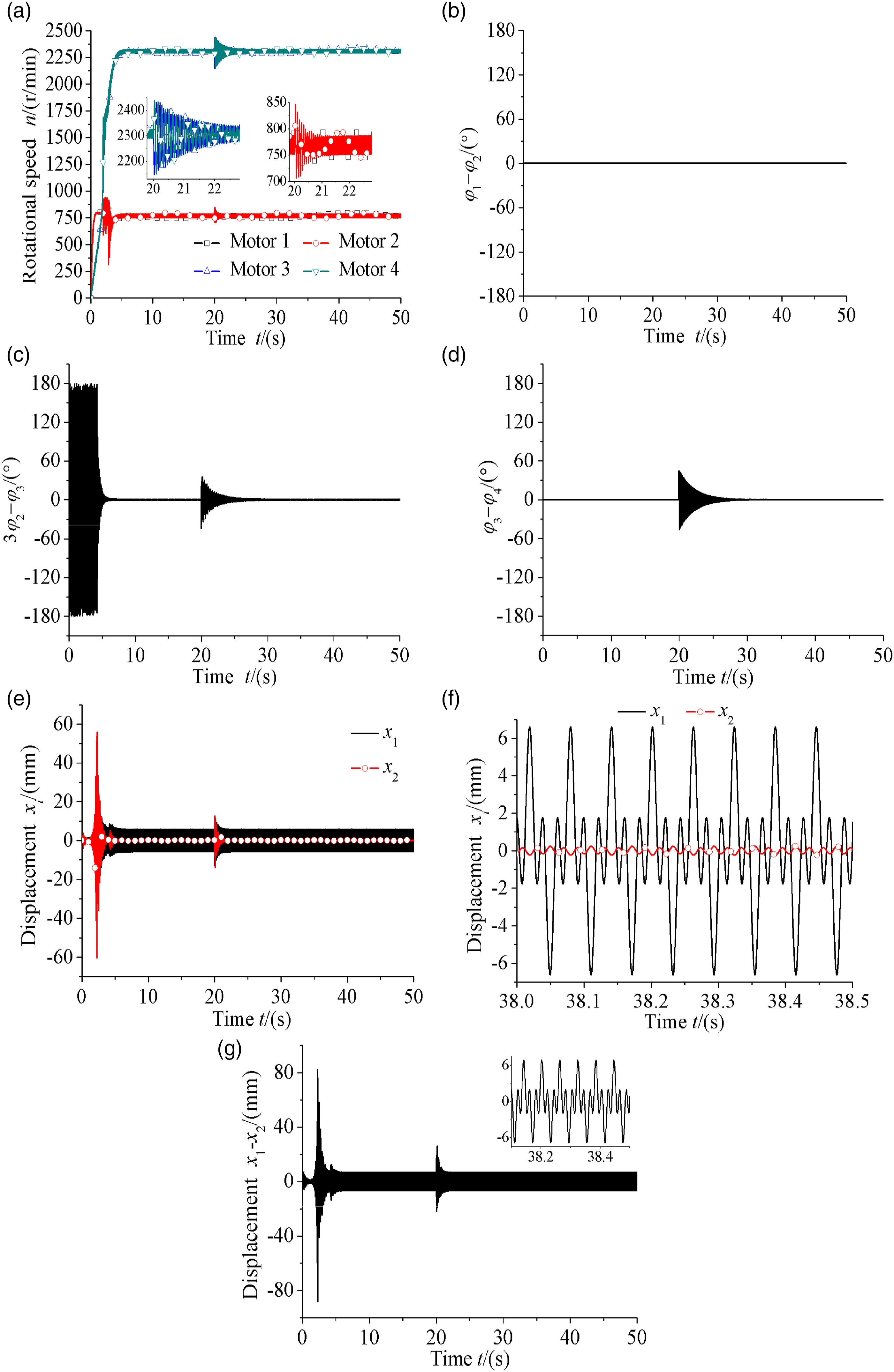
The phase differences among exciters are shown in Figures 5b–d. We can see that the phase differences between any two exciters are all stabilized at around 0°, and the stable phase difference is not influenced after adding the interference.
Figure 5e shows the displacement response curves of the RFs 1 and 2, according to Figure 5f, the specific process of motion in the steady state is known. The amplitude of the RF1 is larger than that of the RF2, while the motion directions of the two RFs are exactly opposite, indicating that the system implements the relative motion with reverse phases. The displacement curves of relative motion between two RFs are illustrated in Figure 5g. There is a response shock wave generated in the steady state, which can rapidly increase the displacements of the RFs, and it is required in engineering.
Conclusions
Based on the above theory, numeric and simulation analyses, the following conclusions are drawn: (1) The multiple-frequency synchronization criterion of the system and the stability criterion of the synchronous state are introduced theoretically, and the stability index is defined to obtain the stable phase relationships among exciters. (2) Based on the mechanical system with two RFs driven by four motor under the vibration isolation condition, the double-frequency and triple-frequency synchronization can be implemented, and the phase differences between arbitrary two exciters are all stabilized at around 0 degree under the condition of double-frequency or triple-frequency synchronization. The system realizes the relative motion with reverse phases, and the motion forms of the main vibrating RF and the isolative RF are almost the same, which verifies the feasibility of the theoretical results. (3) In the steady state, the system will generate displacement response shock wave during the vibration process, which can rapidly increase the displacement of the RFs, which can provide a theoretical guidance for the design of some new types of vibrating machines with multiple frequencies, such as vibrating compacting/polishing equipments. (4) Since there are very few literatures on multiple-frequency synchronization of exciters, and the asymptotic method and the average method in present work are used by us in recent years, some comparisons with other analysis methods are not given here. The experiment system corresponding to the present dynamical model is setting up, and we will give its experimental verification in the future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundations of China [52075085] and the Fundamental Research Funds for the Central Universities [N2103019].