
Abstract
The initial value problem for a lumped parameter model arising from design of magneto–electromechanical device with a current-carrying conductor is analyzed. The differential equation is nonlinear because it includes the magnetic force term. The analysis for the dynamic pull-in occurring in the system is presented. The pull-in threshold is given analytically in terms of model parameters. Sufficient conditions for the existence of periodic solutions are proved analytically and verified numerically. The results can be useful for understanding and design of one-degree-of-freedom models of magnetically actuated beams.
Keywords
Introduction
Pull-in effect occurs in micro-electromechanical systems (MEMS) at certain thresholds. The pull-in analysis of electrostatically actuated devices is very important for the efficient operation conditions and reliability of these devices. The analysis of the dynamic pull-in for MEMS models under applied voltages has been well established in literature for linear elastic materials, e.g., Younis. 1 It is well known that the static pull-in phenomenon occurs when the electrostatic force balances the linear restoring force at around one-third of the distance between the actuating plate and the base substrate, see Younis; 1 Ganji;2,3 Zhang. 4 The first mass-spring model for an electrostatically actuated device has been introduced by Nathanson. 5 For the mass-spring system, Zhang 4 specifies the dynamic pull-in and describes it as the collapse of the moving structure caused by the combination of kinetic and potential energies. In general, the dynamic pull-in requires a lower voltage to be triggered compared to the static pull-in threshold, see Flores; 6 Zhang. 4 Mathematical analysis of the one-degree-of-freedom lumped parameter model for an electrostatically actuated beam has been provided in our previous works, see Skrzypacz; 7 Omarov.8 It is well known in physics and engineering that comparing with electrostatic force the magnetic force stated in Ampére’s law is much larger and therefore in many applications using it as the actuating force has advantages as stated and discussed in Lobato-Dauzier,9 Imai and Tsukioka, 10 and Xingdong.11 In particular, in certain devices and applications such as in vibration-based energy harvesting systems, cf. Shishesaz12 and Shirbani,13 the actuation by magnetic force is at an advantage. Authors of these papers have demonstrated the effects of the magnetic force on actuating devices, numerically approximated the corresponding threshold conditions for pull-in, and discussed vibration amplitudes and frequencies with success. In some cases, the effects of dispersion forces on the actuation device are also taken into consideration, see Sedighi et al. 14 and Cheraghbak and Loghman. 15 In considering the Casimir and van der Waals attractions, the nonlinear lumped parameter becomes more difficult due to inverse cubic and quintic forces.
However, the corresponding mathematical analysis and analytic pull-in conditions appear much more complicated and therefore these forces are omitted here. The models based on the results from Sedighi et al. 14 can be considered in our forthcoming works.
The purpose of this short note is to present the detailed analysis for the dynamic pull-in that occurs due to magnetic force in a MEMS model with a current-carrying conductor. In contrast to the MEMS models with electrostatically actuated plates where the inverse quadratic term corresponds to the Coulomb force, our model equation contains the nonlinear term which is only the inverse of the linear distance since the acting force is related to the electromagnetic force between two wires with constant currents. We derive analytically the conditions for the dynamic pull-in, see Theorem 1 and its corollary, and show the dichotomy: either the initial value problem has a periodic solution or pull-in occurs. The conditions which separate periodic solutions from pull-in are demonstrated analytically in terms of the operating currents, the linear material parameter, and the associated geometric dimensions.
In the second section, we describe the basic principles in magneto-electromechanical systems, and present the model. In the third section, we demonstrate the analytic pull-in conditions and we illustrate the analytic results numerically. We draw the conclusions in the fourth section.
Model problem
In the following, we describe the basic principles in systems based on the magnetic actuation. In magnetostatics, the force of attraction or repulsion between two current-carrying wires is often called Ampére’s force law. The origin of this force is that each wire generates a magnetic field, following the Biot–Savart law, and the other wire experiences a magnetic force as a consequence, following the Lorentz force law, cf. Assis and AKT.16 The force f per unit length between two straight wires can be computed by

We consider the motion of a current-carrying wire of length l and mass m in the field of an infinite current-carrying conductor and restrained by linear elastic springs, see Figure 1. The mathematical model and the bifurcation analysis for the static pull-in have been presented in the textbook of Nayfeh and Mook. 17 Here, we consider the corresponding analysis for the dynamic pull-in.
MEMS with a current-carrying wire.
The dynamic lumped parameter differential equation describing the motion of the wire as a point mass can be derived based on the equation (1) and the theory of lumped parameter modeling of elastic Euler beam as follows



Analysis of dynamic pull-in
Multiplying equation (3) by



The phase diagrams for several values of K are presented in Figure 2. The closed orbits in phase diagrams represent periodic solutions. We see in Figure 2 that the periodic solutions are expected for small parameter values of K > 0. The following theorem determines the range of the positive parameter K for which the dynamic pull-in occurs.
Phase trajectories for




The assertion follows from the numerical solution of the above inequality.
Consequently, it holds true.
Several solution profiles of x(t) obtained by the standard Maple Ordinary Differential Equation (ODE) solver Hunt et al.
18
for different sets of parameter K > 0 are presented in Figures 3 and 4. Notice that the time axis corresponds to the normalized time. Clearly, the periods and pull-in times depend on the positive parameter K. The critical value
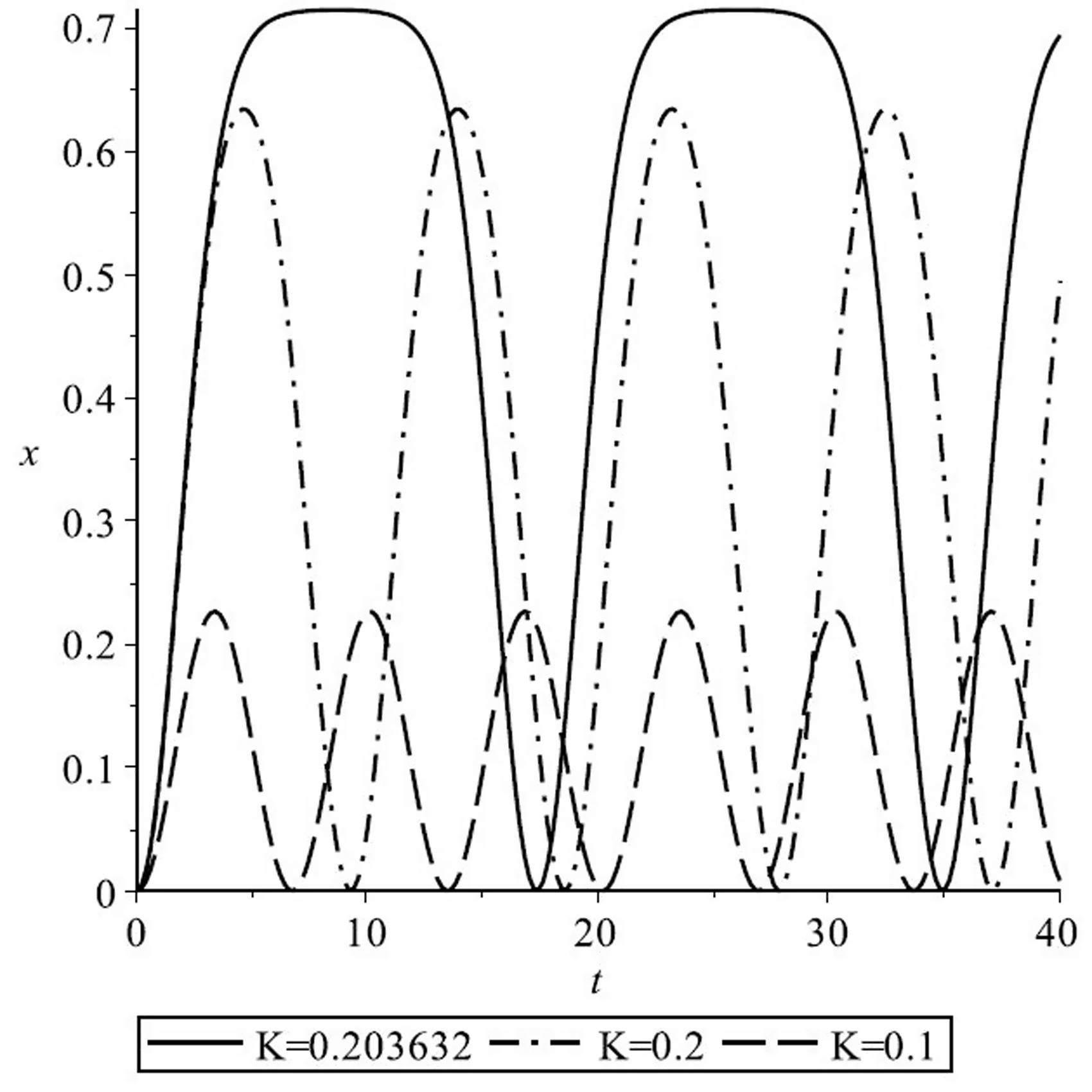
Profiles of periodic solutions for different values of K > 0.
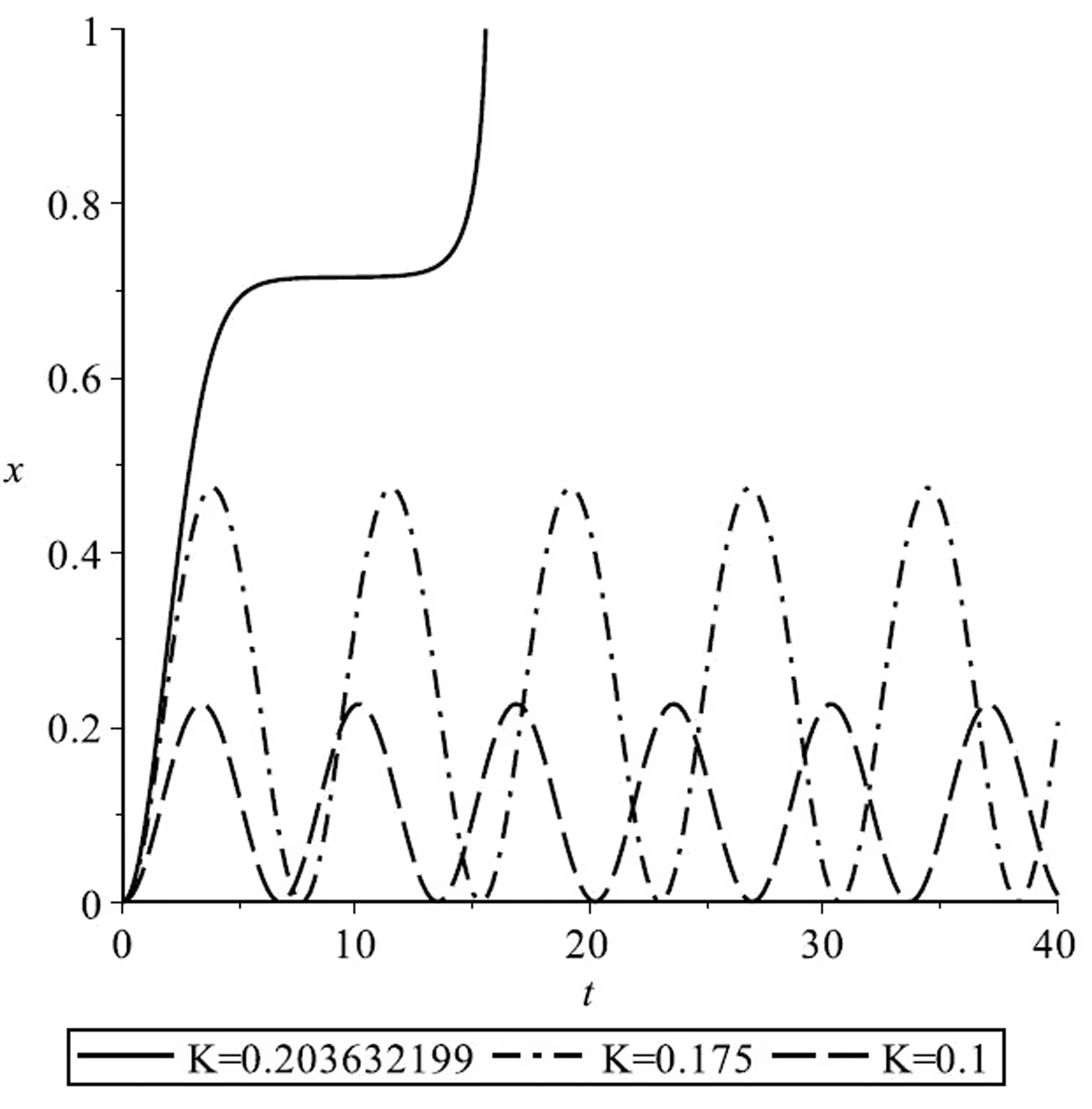
Profiles of periodic and pull-in solutions for different values of K > 0.
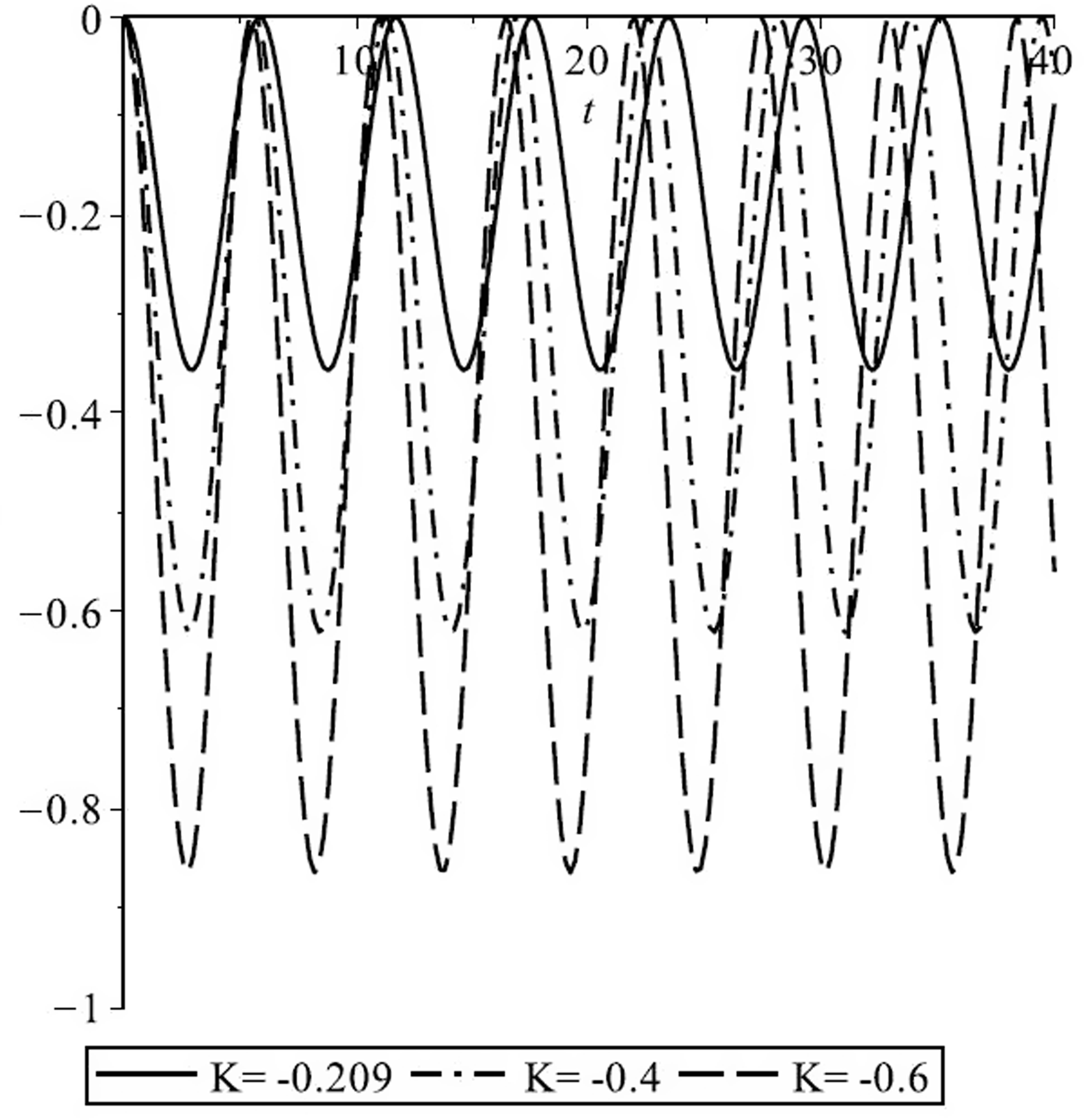
Solution profiles for different values of K < 0.


In Figure 6, we numerically demonstrated how the pull-in time decreases when the parameter
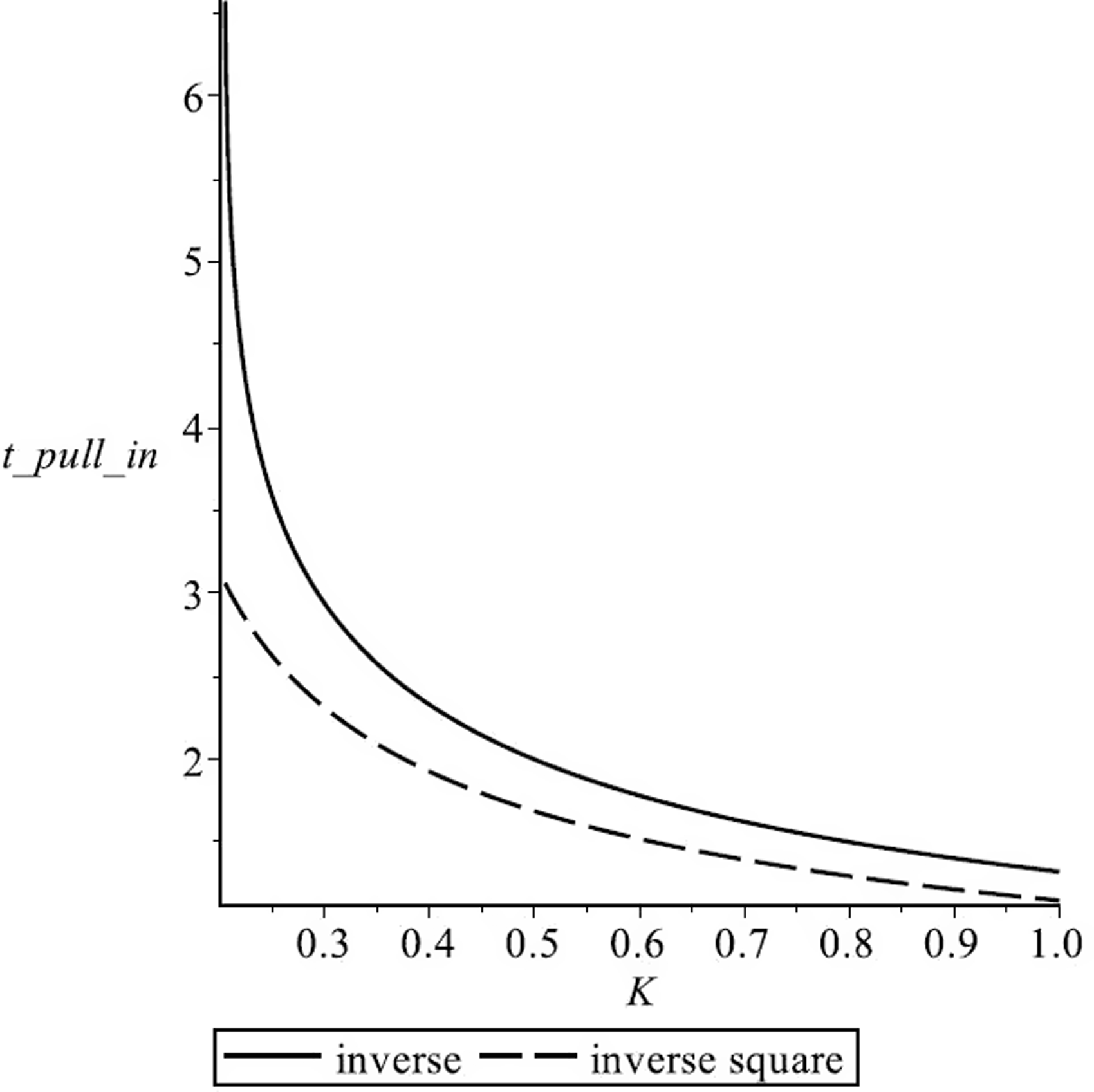
Scaled pull-in time for
The formula

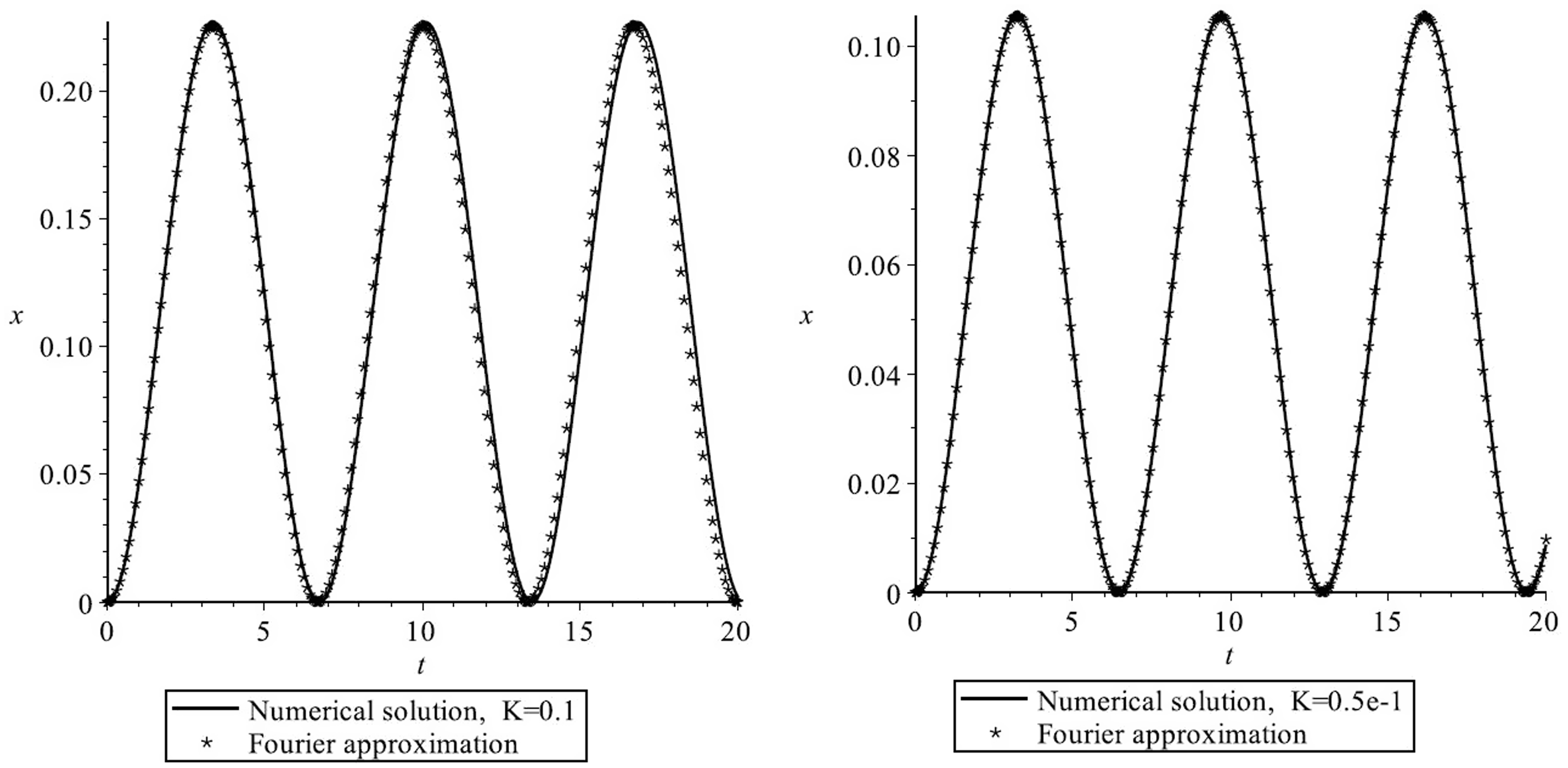
Fourier approximations of periodic solutions for different values of K.
Conclusions
Dynamic pull-in conditions for a MEMS switch with current carrying conductor subject to the electromagnetic force with the linear restoring force are obtained. Specific conditions for dynamic pull-in phenomenon to occur in the model are presented in the case of zero initial conditions in terms of the operating currents, the spring parameter, and the geometric dimensions. Numerical illustrations and validations of the analytic solutions are also presented. The results obtained in this short note are novel and can be useful for design of some MEMS with current-carrying conductor.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the Nazarbayev University ORAU grant “Modeling and Simulation of Nonlinear Material Structures for Mechanical Pressure Sensing and Actuation Applications” awarded to Dr. Dongming Wei.