
Abstract
Phase difference is an important factor affecting the performances of the synchronous vibrating system driven by the two excited motors. The nonlinear dynamic models of the synchronous vibrating system under the action of the nonlinear elastic force are established. The periodic solutions for the synchronous vibrating system are theoretically derived using the nonlinear dynamic models. The stabilities of periodic solution for the synchronous vibrating system are theoretically analyzed using Jacobi matrix of the amplitude-frequency-characteristic equation. Using Matlab, the amplitude-frequency characteristics are analyzed through the selected parameters. The relations between the phase difference and the amplitude in the synchronous vibrating system are also investigated. Various nonlinear phenomena, such as the jump phenomenon and the multiple-valued periodic solutions, are reproduced using relation between the phase difference and the amplitude. The stable periodic solutions can be obtained by the different initial conditions, using Runge–Kutta method. The effects of the phase difference on the amplitude are presented for the changes of system parameters (including the stiffness of the soil and the damping of the soil, the mass of the eccentric block). The effects of the dynamic characteristics on the phase difference are analyzed through the difference rates of the two excited motors and the initial conditions of the system. It has been shown that the research results can provide a theoretical basis for the research of the synchronous vibrating system.
Keywords
Introduction
Phase difference has been an important factor in the self-synchronous vibrating system with double rotating eccentric rotors. Phase difference is usually explained that the phase difference of the rotating eccentric rotors on two excited motors. When the eccentric rotors on two excited motors are the reverse and synchronous rotation, the synchronous operation stability of the self-synchronous vibrating system with double rotating eccentric rotors can be achieved, which can be named as the vibration synchronization in the vibration system. The vibration synchronization can be obtained through the phase synchronization (or speed synchronization), which is explained that the phase difference of the two eccentric blocks is 0 or constant. 1
In recent years, many models about the vibration synchronization for the self-synchronous vibrating system, such as the linear model with the linear stiffness and the simplified ideal model, have been investigated and found in many studies.2–4 With the development of the nonlinear vibration theory, the researches on the vibration synchronization of the nonlinear model have also been further developed about the self-synchronous vibrating system. For example, some scholars 5 investigated the vibration synchronization characteristics about nonlinear vibration system with piecewise linear stiffness. It had shown from studies6,7 that the harmonic vibration synchronization about the nonlinear vibration system with the flexible nonlinear stiffness was analyzed using the theory of frequency capture. In summary, all of the researches about the vibration synchronization, whether the linear models8–10 or the nonlinear models,11–13 were also about the analysis of the phase difference with zero. So the investigations on the phase difference of the two eccentric rotors have become one of the key issues in the synchronous vibrating system. But the investigations on the relation between the phase difference and the amplitude can be rarely found in many references.14,15,16 Thus the effect of phase difference on dynamic characteristics for the synchronous vibrating system should be studied.
Firstly, the nonlinear vibration models are established to describe the synchronous vibrating system in this paper. Secondly, the dynamic characteristics of the synchronous vibrating system are investigated to find the relation between the phase difference and the amplitude. Finally, the stabilities of periodic solution for the self-synchronous vibrating system are analyzed.
Mathematical model
The vibrating force on the vertical direction will be generated by the eccentric rotors with the reverse rotation on the double excited motors in the synchronous vibrating system. The dynamic model of the synchronous vibrating pile system is shown in Figure 1, as shown in Figure 1, oxy is the coordinate system of the nonlinear vibrating system, O is the center of the system (it is also the midpoint of the line of the rotating shaft for the eccentric rotors), O1 and O2 are the centers of the rotating shafts for the eccentric rotors. Using Lagrange equation, the differential equations of the synchronous vibrating system under the action of the nonlinear elastic force are defined as

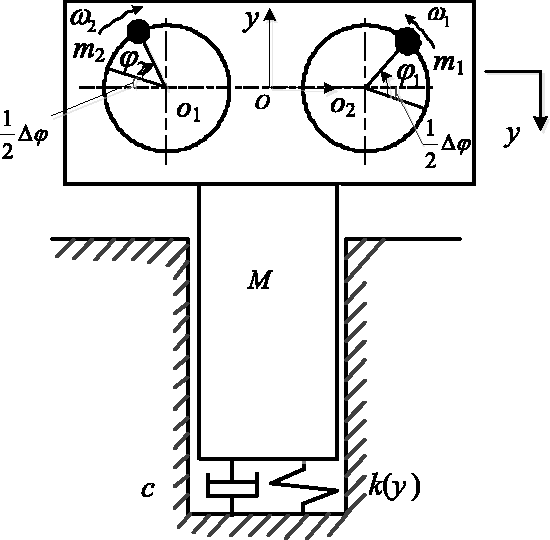
Dynamic model of synchronous vibratory system.
In equation (1),
Theoretical analyses
Analytical solution
The angular velocity

In equation (2),

In equation (3),
The periodic solutions of equation (3) is deduced using two different time scales T0 and T1, namely,

All the coefficients of

The general solution of

The secular term in equation (6) should be removed and can be defined as

In equation (7),

Equation (8) is carried into equation (7) and can be written as

In equation (9),

Equation (10) should be transformed into an autonomous system (T1 is not included in the system), so the first equation is multiplied by

In equation (11),

In equation (12),

In equation (13),

In equation (14),
Amplitude-frequency characteristic
The certain parameters in the synchronous vibrating system may be selected and be represented in Table 1. The amplitude-frequency characteristic can be analyzed through the selected parameters in equation (12). Then using Matlab, the curve of the amplitude-frequency characteristic is shown in Figure 2.
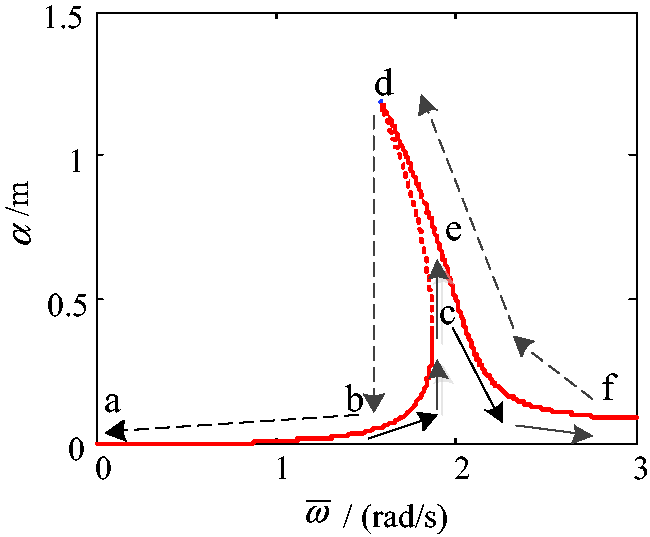
Curve of amplitude-frequency characteristic.
The certain parameters in the synchronous vibrating system.

The effect of phase difference on dynamic characteristics
Stabilities of periodic solution
A stable periodic solution of the synchronous vibrating system in equation (14) can be presented for the analysis of 
The derivatives of equation (15) are substituted into equation (11) and can be re-expressed as

In equation (16), the first equation is multiplied by 
The stabilities of 
The eigenvalues equation of equation (18) can be defined and simplified as

The stabilities of the periodic solution in the synchronous vibrating system can be theoretically explained as the following three points
When
Obviously, b. When c. When
Phase difference-amplitude characteristic
When the excited frequency is close to the definite range of the first natural frequency in the vibrating system (namely,
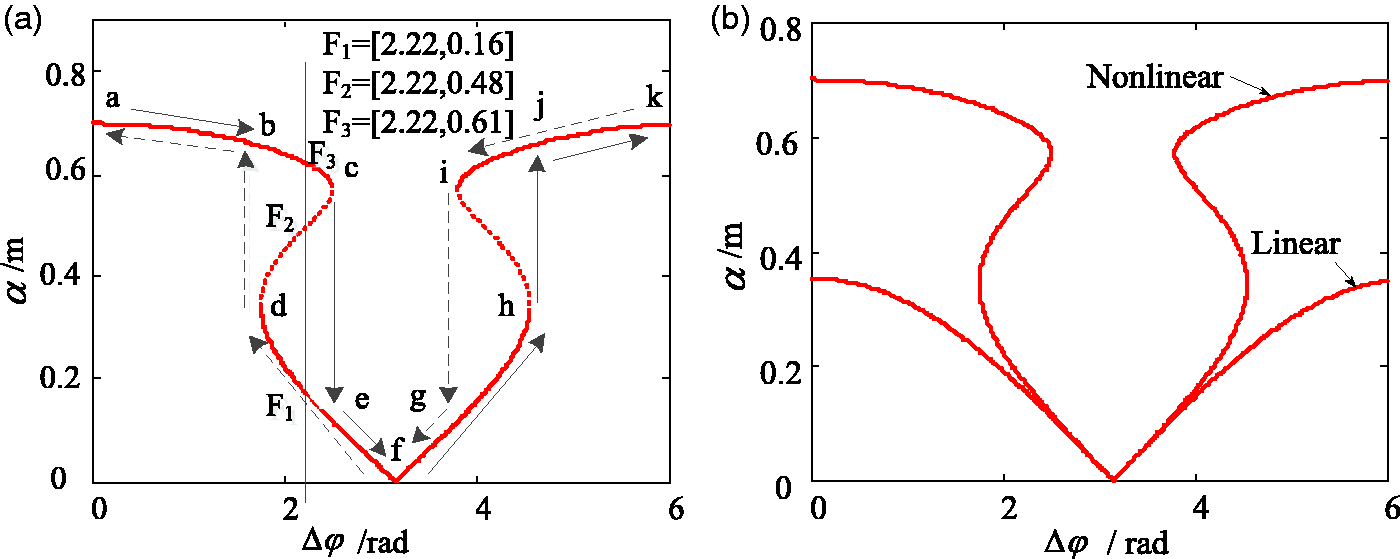
Relation between the phase difference and amplitude. (a) Under nonlinear conditions and (b) Under linear and nonlinear conditions.
As shown in Figure 3(a), the maximum amplitude is presented for the phase difference
As shown in Figure 3(a), when the phase difference
When the nonlinear coefficient ε of the soil is 0 and removed in equation (12), the linear system can be displayed in Figure 3(b). As shown in Figure 3(b), “Linear” in Figure 3(b) represents the linear system, and “Nonlinear” represents the nonlinear system. The amplitude in the linear system is obviously decreased from the maximum amplitude, but the maximum amplitude in the nonlinear system is dropped slowly at these two intervals ab hi and kj, which is named as the stable regions of the maximum amplitude. The stable regions of the maximum amplitude in the nonlinear system are more stable than in the linear system, which are very beneficial to the vibrating machine.
The effect of phase difference on stability of periodic solution
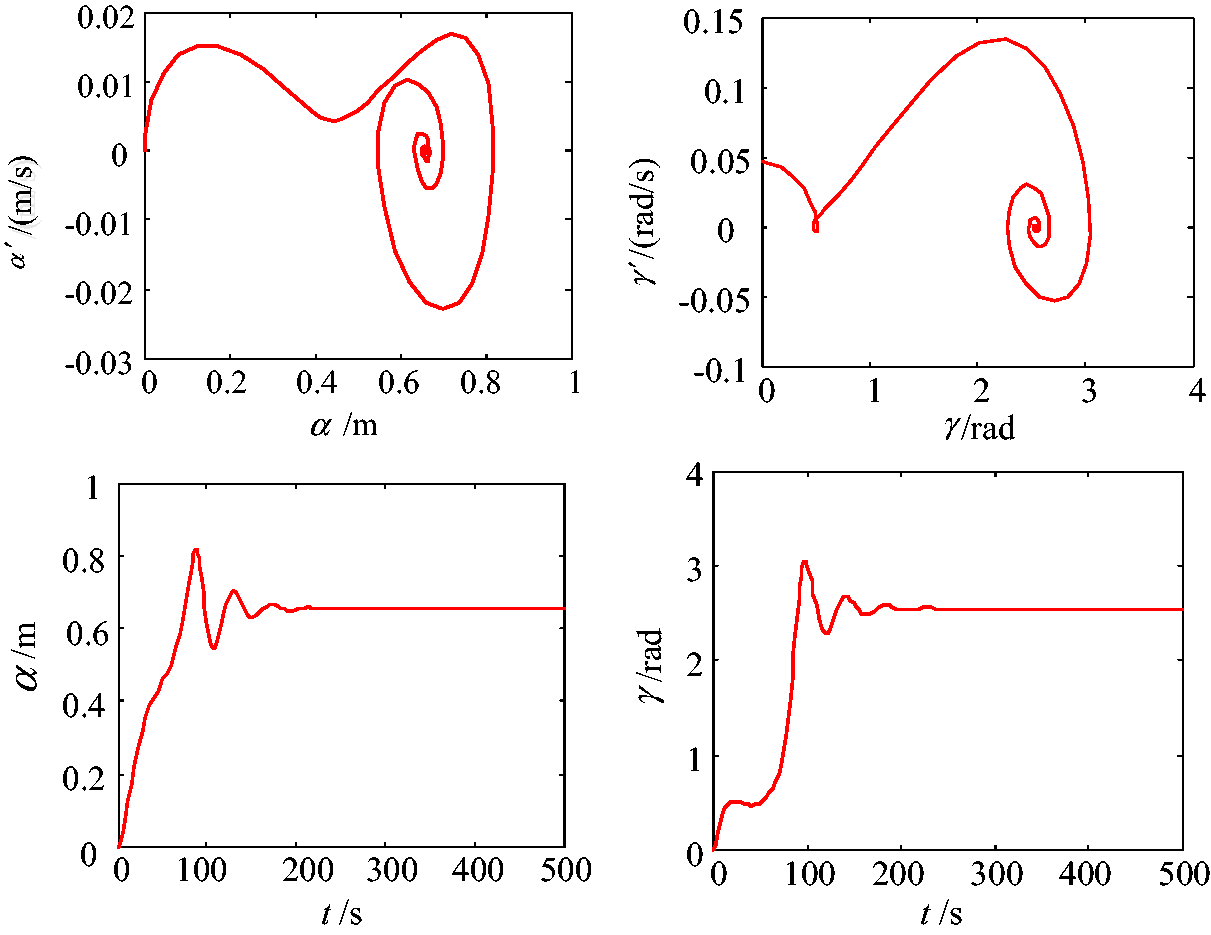
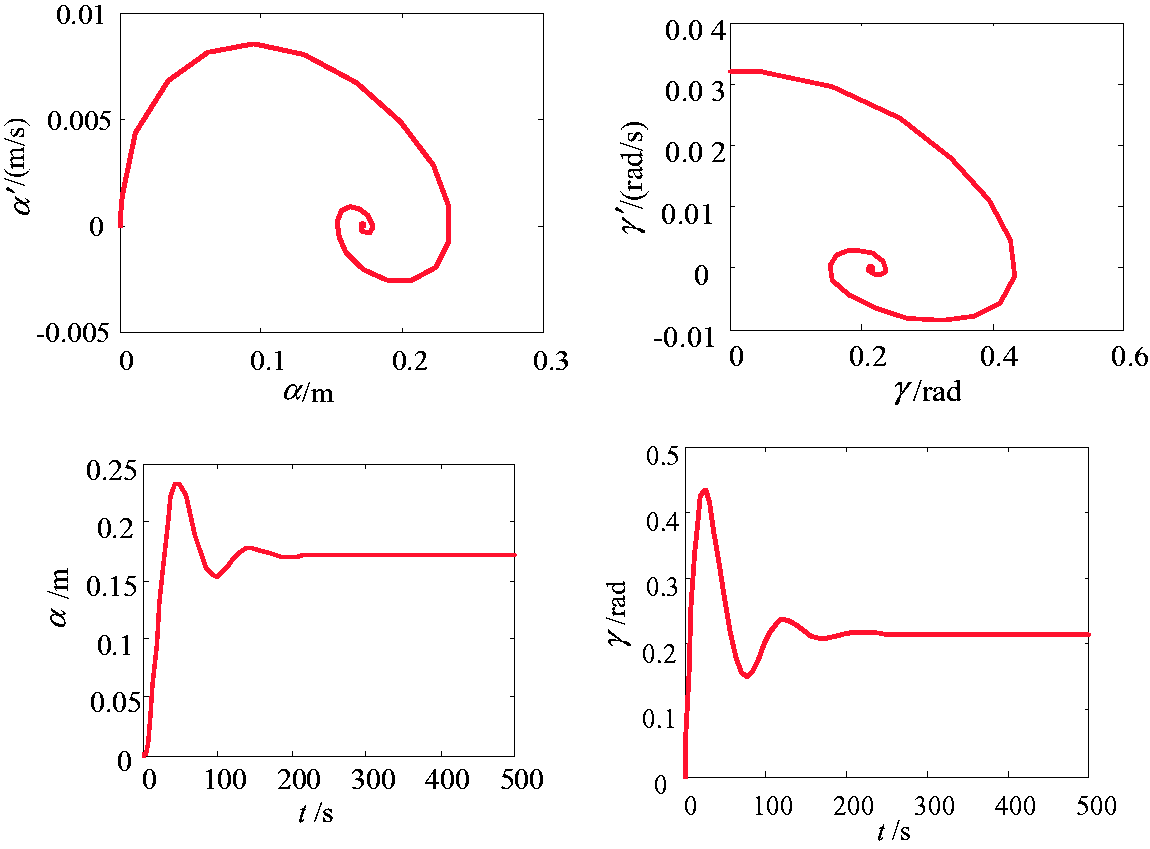
Based on the theoretical analysis about the stability of the periodic solution in the first section, the stability of the periodic solution can also be determined using the relation between the phase difference and the amplitude. As shown in Figure 3(a), these three points on the region of the multiple-valued amplitudes can be found for F1=(2.22, 0.16), F2=(2.22, 0.48), F3=(2.22, 0.61). F2 is on the dotted line and should be unstable point. The periodic solution at F2 is unstable solution. So F2 cannot be achieved in any experiment. F1 and F3 should be stable points and the periodic solution at F1 and F3 are stable solution in Figure 3(a). The selected system parameters in the synchronous vibrating system are substituted to equation (19). Equation (19) can be written as

In equation (20), when F1=(2.22, 0.16), the phase difference
The effect of the phase difference on the stability of the periodic solution can be obtained using the phase planes and the waveforms of
The phase plane and the waveform at
The phase plane and the waveform at
As shown in Figure 3(a), when the phase difference
The phase plane and the waveform at
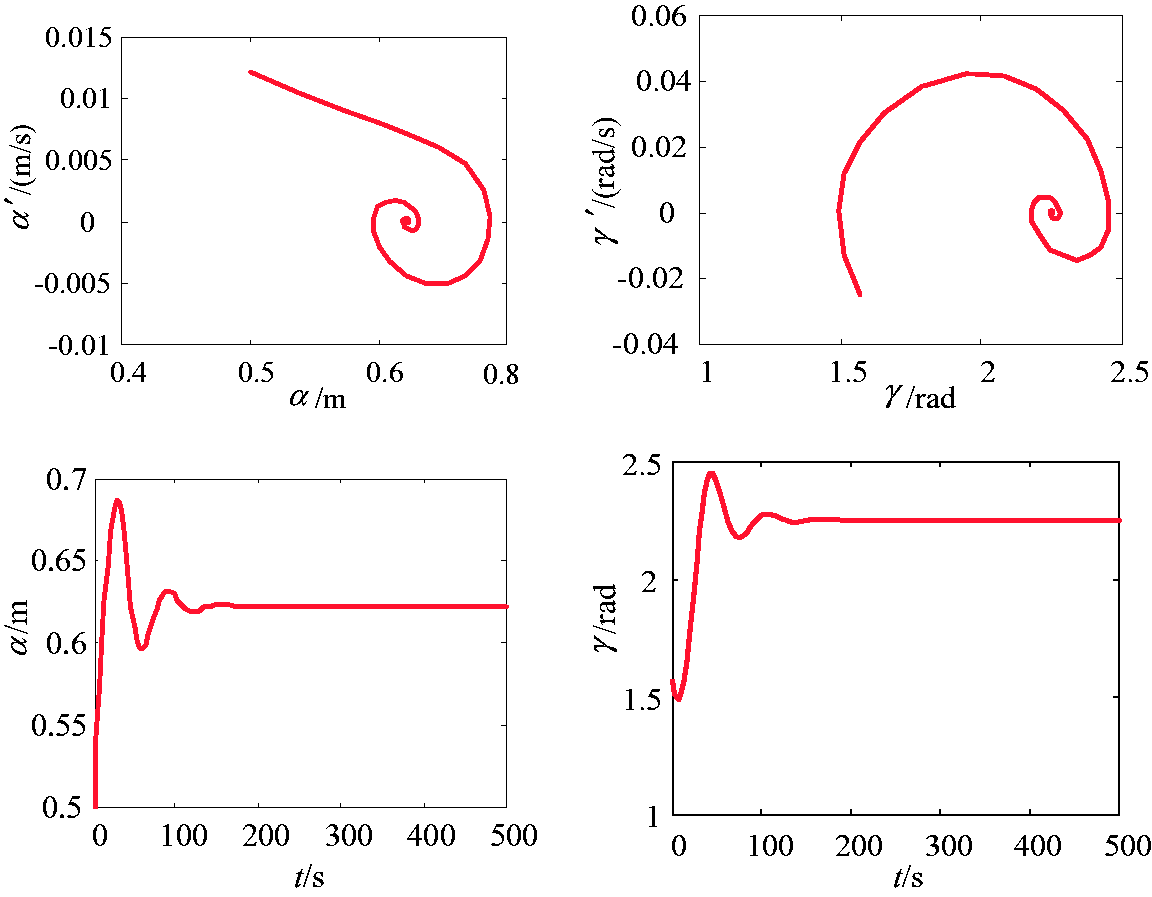
The phase plane and the waveform at
The effect of phase difference on the amplitude
When the system parameters are changed in the synchronous vibrating system, the relation between the phase difference and the amplitude is shown in Figure 8. As shown in Figure 8, the maximum amplitude at 0 and 2π can be increased with the decrease of the system parameters (such as the soil damping c and the nonlinear elastic coefficient ε of soil). The maximum amplitude can also be increased through the increase of the linear stiffness
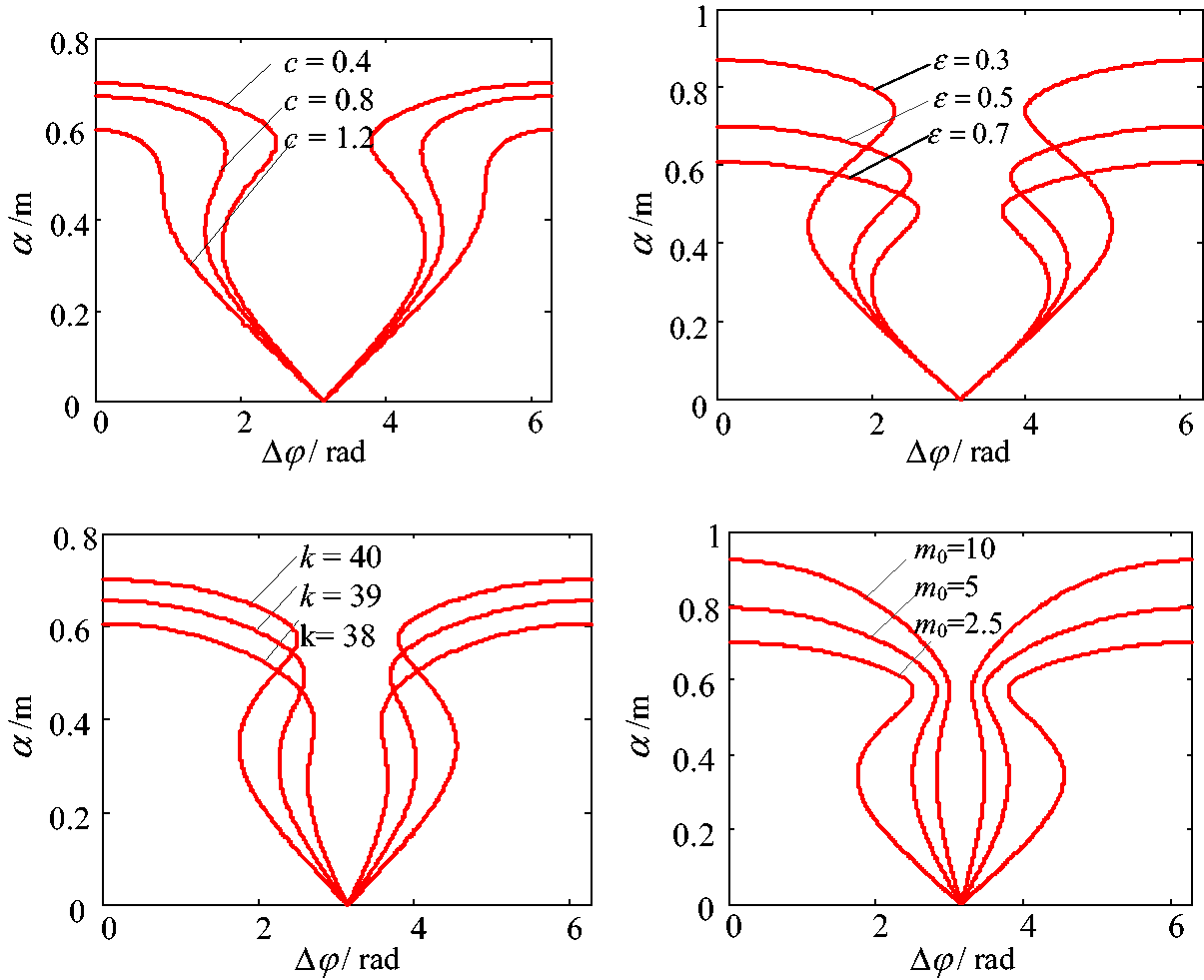
Relation between the phase difference and amplitude under the change of parameters.
The effect of dynamic characteristics on phase difference
The synchronous states of the double eccentric rotors are influenced by the dynamical characteristics of the synchronous vibrating system. Moreover, the dynamical characteristics of the synchronous vibrating system also affect the synchronous state of the double eccentric rotors. So the effect of dynamic characteristics on phase difference should be analyzed as the following.
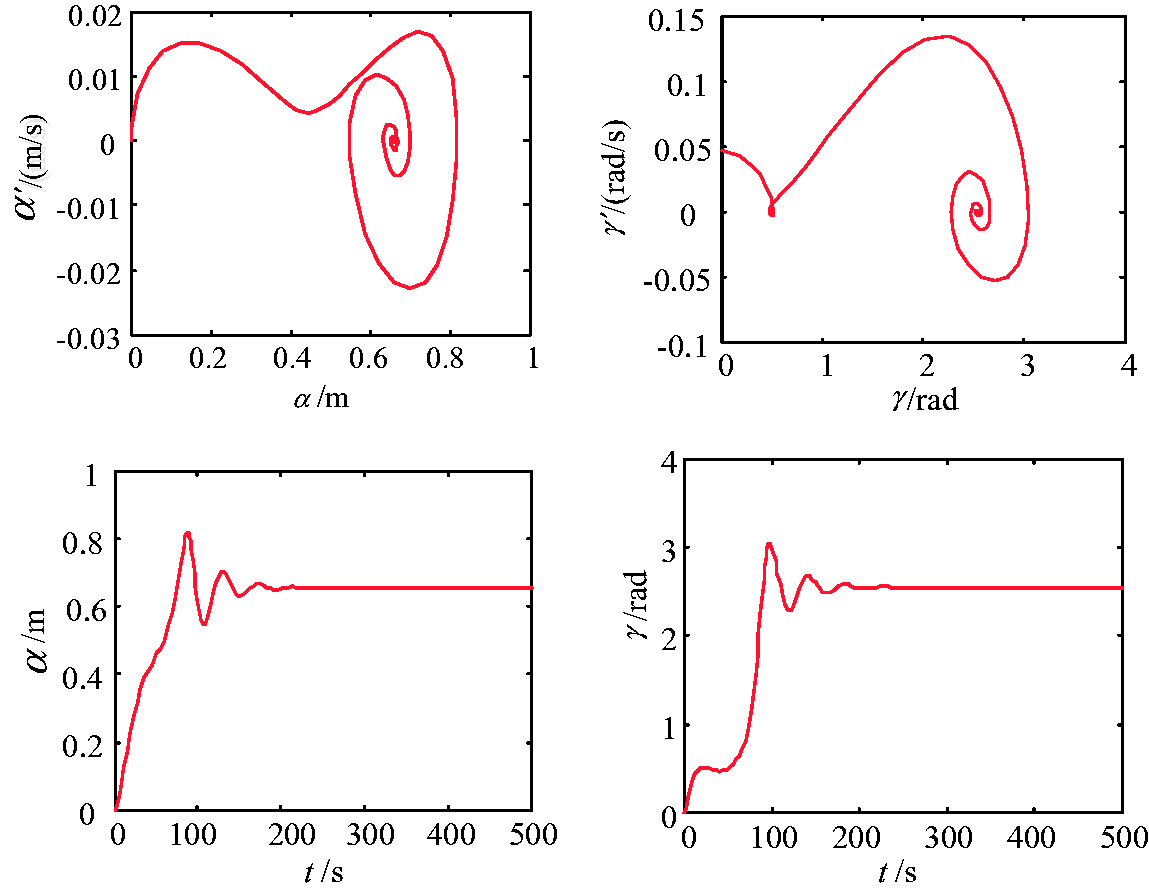
The last two equations of equation (1) are named as the rotation equation of the double eccentric rotors; they can reflect the effect of dynamic characteristics on phase difference. The simulation is performed using Matlab/Simulink and the responses of the phase difference and dynamic characteristics in the model of the self-synchronous vibrating pile system have been obtained using the combination of equation (1) with the electromagnetic torque equation and the rotor motion equations about the motor. From the point of view of simulation analysis, when the difference rate of the two excited motors is 0 and the initial conditions of the system are 0, the vibration displacement and the response of phase difference are obtained as shown in Figure 9. As shown in Figure 9(a), the vibration displacement tends to be stable and does periodic motion. The displacement of the periodic motion is eventually stabilized at about 0.68 m. As shown in Figure 9(b), when the initial phase difference is 0, the phase difference are always 0.
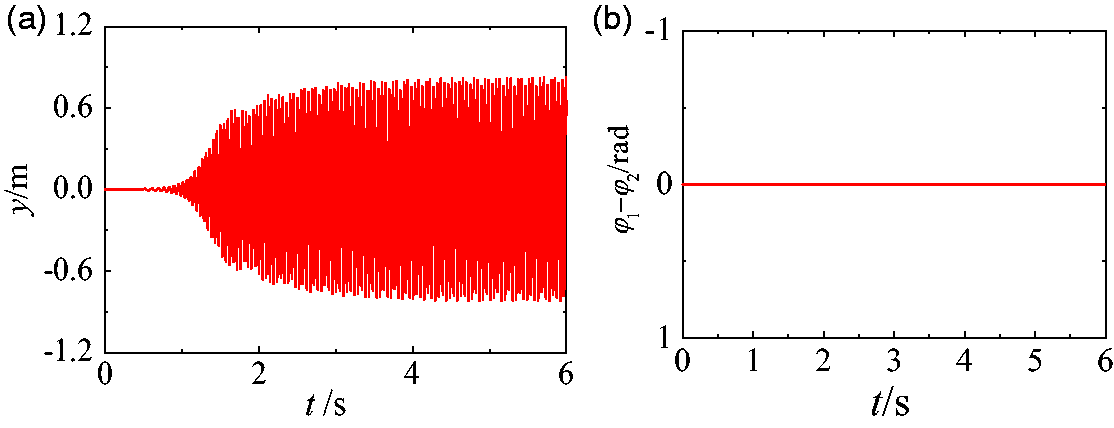
Parameters simulation of the system under ideal conditions. (a) The initial displacement (0 m) and (b) The initial phase difference (0 rad).
When the initial displacement of vibration system is −0.02 m, the vibration displacement of the system is shown in Figure 10(a). The vibration displacement tends to be stable and do periodic motion. Finally, the displacement of the periodic motion is eventually stabilized at about 0.68 m, after a significant periodic movement. But the response of the phase difference is the same as the response in Figure 9(b); the phase difference is still 0 and it has no change. It has been shown that the changes of the initial displacement cannot affect the phase difference.
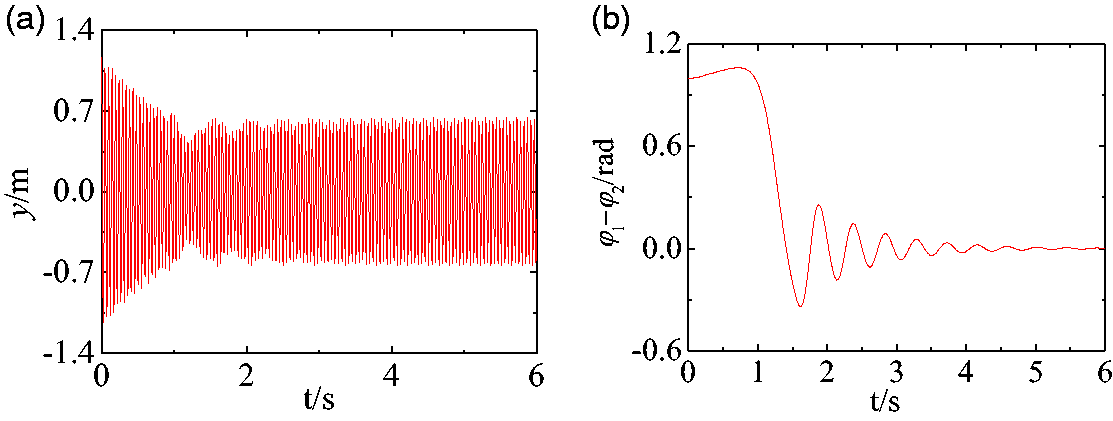
The system parameter response in different initial conditions. (a) The initial displacement (−0.02 m) and (b) The initial phase difference (1 rad).
When the initial phase difference of vibration system is 1 rad, the response of the phase difference is shown in Figure 10(b). When the initial phase difference of vibration system is π rad, the vibration displacement of the system and the response of phase difference are obtained as shown in Figure 11. As shown in Figures 10(b) and 11, as a result of some differences about the initial phases between double eccentric rotors, the phase differences are all experienced a gentle transition process, and then, high fluctuations of the phase difference are shown; finally, the phase difference is stable at 0 or π rad. When the phase difference is finally stable at 0 in Figure 10(b), the diagram of vibration displacement does not change, which is basically the same as vibration displacement in Figure 9(a). When the phase difference is finally stable at π rad, as shown in the second small graphs of Figure 11, the vibration displacement does the periodic motion in a very small range; finally, the amplitude of the periodic motion is eventually stabilized at about 0. As a result of no vibration displacement, this is not expected in the engineering practice.
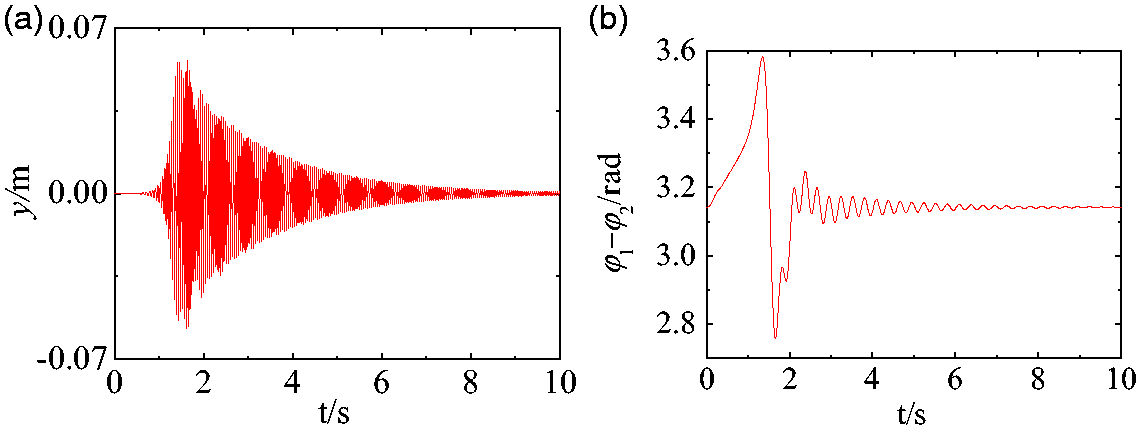
The system parameter response in different initial conditions.
As shown in Figure 3(a), when the phase difference is at 0 or 2π, the maximum amplitude can be obtained at 0 or 2π. But when the phase difference is at π rad, the amplitude is 0. As shown in Figures 9 to 11, when the phase difference is eventually stabilized at 0, the maximum amplitudes can be obtained. When the phase difference is eventually stabilized at π rad, the amplitude of the periodic motion is very small or even 0. This is consistent with the theoretical conclusions in Figure 3(a).
When the difference rates of two excited motors producing the excited force are in a certain range, the synchronous state of the double eccentric rotors can still be realized by itself. The phase difference and the phase plane of the phase difference and the rotational speed difference are shown in Figure 12. As shown in Figure 12, when the difference rates of two excited motors (including the difference of the eccentric mass distance in exciting forces, the different initial conditions about the motors parameters, the difference of the motors parameters) are in a certain range, the phase difference can be stable at 0 (or 2π) and π. The phase plane graph about the phase difference has a limit cycle. It has been shown that the phase difference is stable and the synchronous state of the double eccentric rotors can be achieved. When the phase difference can be stable at 0 or 2π (namely, Figure 12(a) and (b)), the synchronous state of the double eccentric rotors and the synchronous stability operation of the self-synchronous vibrating system can be obtained to achieve the large amplitude of the vibration. When the phase difference can be stable at π rad (namely, Figure 12(c)), the synchronous state of the double eccentric rotors can also be achieved. But the minimum amplitude or even the amplitude of 0 is obtained, which means that there is no vibration in the synchronous vibrating system. So the phase difference can be stable at π rad, which should be avoided in the engineering practice.
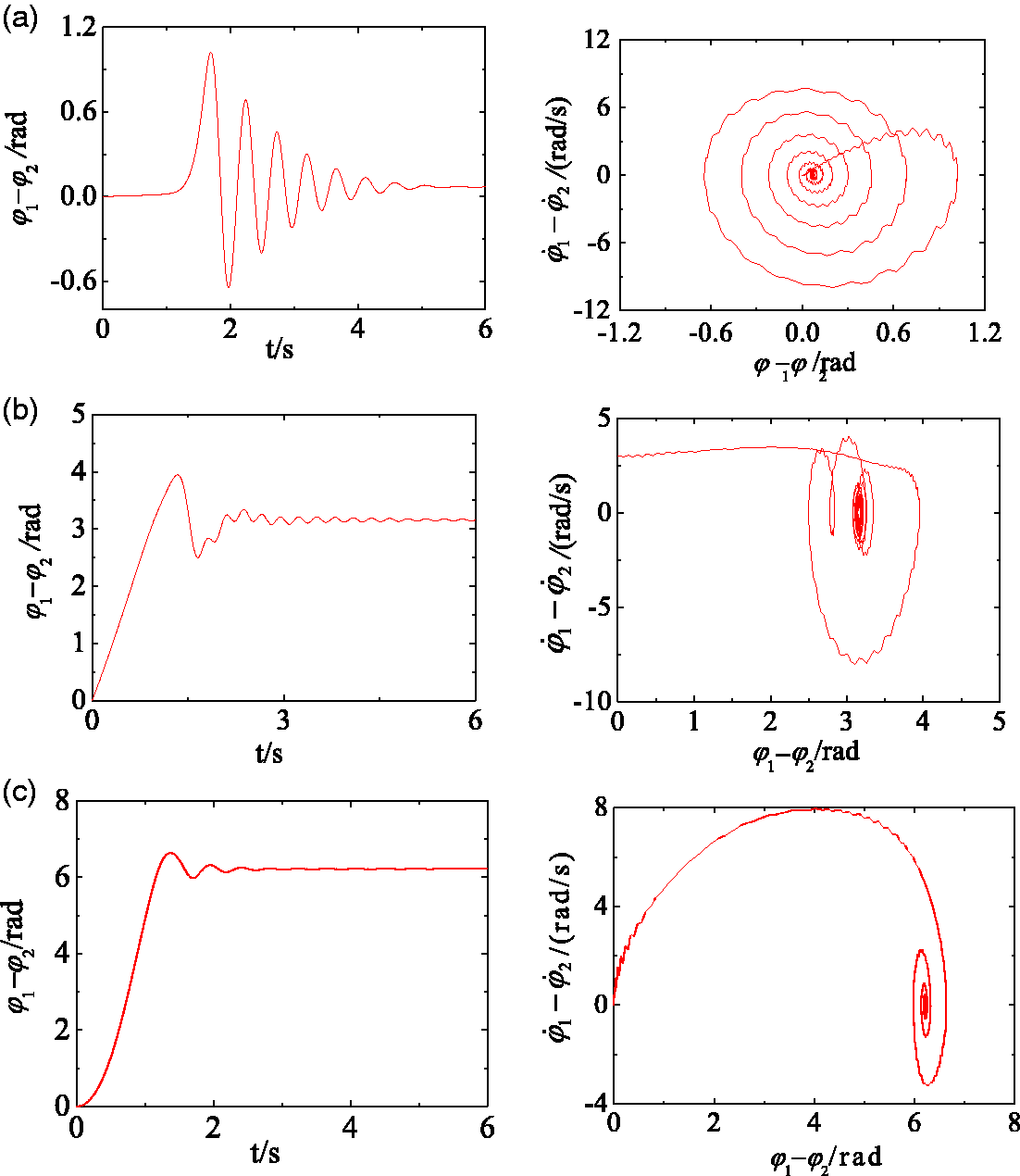
Simulation of the system in the difference of the motors parameters. (a) In the difference of the eccentric mass distance in exciting forces. (b) In the different initial conditions about the motors parameters. and (c) In the difference of the motors parameters.
Conclusion
Here, the stabilities of the periodic solutions in the synchronous vibrating system with double rotating eccentric rotors have been theoretically derived. The stability of the periodic solutions has been discussed in theory and also determined using the relation between the phase difference and the amplitude. Phase difference-amplitude characteristic has been presented for the analysis of the relation between the phase difference and the amplitude, which is induced by the equation of amplitude-frequency characteristic. It has been shown that three periodic solutions can be obtained at the regions of the phase difference with the multiple-valued amplitudes. Two periodic solutions among the three periodic solutions are stable, while the other is unstable. In addition, the jump phenomenon is occurred at the critical point of the multi-valued amplitude region. Then the stable solution with the large amplitude can be obtained through the choices of the initial conditions. The amplitude can be improved through the appropriate chance of the system parameters. For example, the maximum amplitude can be increased through the decrease of the system parameters (such as the soil damping c and the nonlinear elastic coefficient ε of soil) and the increases of the stiffness of the soil. When the difference rates of the two excited motors and the initial conditions of the system are in a certain range, the synchronous state of the double eccentric rotors can still be realized by itself. The changes of the initial displacement cannot affect the phase difference. But some differences about the initial phases can affect the phase difference. When the phase difference can be stable at 0 or 2π, the synchronous state of the double eccentric rotors and the synchronous stability operation of the self-synchronous vibrating system can be obtained to achieve the large amplitude of the vibration. When the phase difference can be stable at π rad, the synchronous state of the double eccentric rotors can be obtained to achieve the minimum amplitude or even the amplitude of 0, which should be avoided because of no vibration in the synchronous vibrating system.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The author gratefully acknowledges that this project was supported by the National Natural Science Foundation of China (grant no. 51605022), the Fundamental Research Funds for Beijing University of Civil Engineering and Architecture (serial numbers: X18096 and X18116) and the science research foundation of Beijing University of Civil Engineering and Architecture under the project no. ZF16082.