
Abstract
Harmonic vibration synchronization of the two excited motors is an important factor affecting the performance of the nonlinear vibration system driven by the two excited motors. From the point of view of the hysteresis force, the nonlinear dynamic models of the nonlinear vibration system driven by the two excited motors are presented for the analysis of the hysteresis force with the asymmetry. An approximate periodic solution for the nonlinear vibration system with the hysteresis force is investigated using the nonlinear models. The condition of harmonic vibration synchronization is theoretically analyzed using the rotor–rotation equations of the two excited motors in the nonlinear dynamic models and the stability condition of harmonic vibration synchronization also is theoretically analyzed using Jacobi matrix of the phase difference equation of two excited motors. Using Matlab/Simlink, harmonic vibration synchronization of the two excited motors and the stability of harmonic vibration synchronization for the nonlinear vibration system with the hysteresis force are analyzed through the selected parameters. Various synchronous processes of the nonlinear vibration system with the hysteresis force are obtained through the difference rates of the two excited motors (including the initial phase difference, the initial rotational speed difference, the difference of the motors parameters). It has been shown that the research results can provide theoretical basis for the design and research of the vibration system driven by the two-excited motors.
Keywords
Introduction
Harmonic vibration synchronization of the two excited motors has been an important factor in the vibration system driven by the two excited motors. Harmonic vibration synchronization is usually explained that the two eccentric rotors on the two excited motors must be done synchronous operation when the excitation frequency is close to the definite range of the first natural frequency in the vibration system driven by the two excited motors, namely, the phase difference of the two eccentric rotors is 0 or constant when the excitation frequency is close to the definite range of the first natural frequency. The vibration system driven by the two excited motors can be named as the self-synchronous vibration system. The large amplitude can be obtained in the self-synchronous vibration system with harmonic vibration synchronization. The large amplitude of the vibrating system is very favorable in many engineering field, especially in the vibrating compaction system. So the harmonic vibration synchronization in the self-synchronous vibrating system is very important for performances.
The research on vibration synchronization can be found in many references.1,2 Many models of the self-synchronous vibrating system, such as the linear model with the linear stiffness and the simplified ideal model, have been investigated and can be found in many references.3–5 It is no doubt that linear model is a very good model for the analysis of the vibrating system driven by the multi-excited motors, but it is of very limited to describe vibration synchronization in the vibrating system. With the development of nonlinear vibration theory, many nonlinear models about the vibration synchronization, such as the nonlinear model of the duffing equation, the nonlinear model of the piecewise linear stiffness and so on, have been investigated and found in many literature.6–10 The relationship between the excitation frequency and the natural frequency in the vibrating system driven by the multi-excited motors has been investigated and can be found in many references.11–14 In addition, in order to ensure the synchronous operation of the multi-excited motors and the synchronous stability of the vibrating system, most of the traditional vibration machines can be run on the far-super resonance state, 11 but it is of very limited to obtain the stable operation and the large vibration.With the development of vibration theory, the frequency range of the vibrating system driven by the multi-excited motors, such as a super-resonant vibrating system, 12 a non-resonant vibrating system13,14 and the combination of the resonance and non-resonance vibrating system,15–17 has been greatly expanded. Obviously, the occurrence of vibration synchronization in the vibrating system driven by the multi-excited motors can also be impacted by the relationship between the excitation frequency and the natural frequency. The large amplitude can be obtained in the vibration system with harmonic vibration synchronization. Thus the investigations on harmonic vibration synchronization for a nonlinear vibrating system with the hysteresis force have become one of the key issues in the nonlinear vibrating system driven by the multi-excited motors.
In this paper, from the point of view of the hysteresis force with the asymmetry, the nonlinear dynamic models of the self-synchronous vibrating system also are presented for the analysis of the hysteretic characteristics. The condition and the stability condition of harmonic vibration synchronization for the self-synchronous vibrating system with the hysteresis force is theoretical analyzed using the rotor–rotation equations of the two excited motors. Using Matlab/Simlink, the synchronous operation of the two-excited motors and the synchronous and stable operation of the self-synchronous vibrating system with the hysteresis force are analyzed through the selected parameters.
Mathematical model and solution
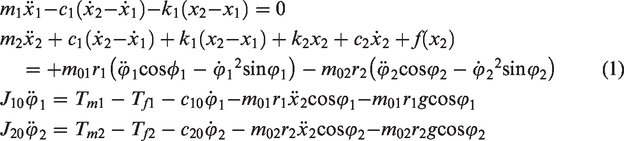
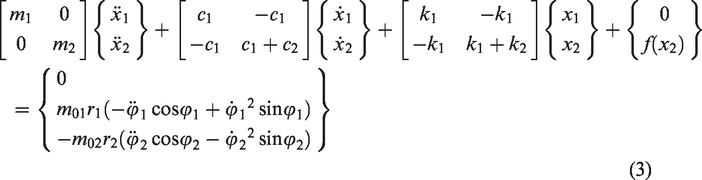
The nonlinear dynamic model of the nonlinear vibration system driven by the two excited motors are presented and shown as Figure 1. As shown in Figure 1, The nonlinear model of the nonlinear vibration system has two vibrating bodies. The two excited motors are installed on the vibrating body 2. Δφ is named as the phase difference angle of the eccentric blocks on the two excited rotors. The vibrating force in the vertical direction can be generated by the two eccentric rotors with the reverse rotation on the two excited motors in the nonlinear vibration system. O1, O2 is the center of the rotating shaft for the two excited motors. Using Lagrange equation, the differential equations of the self-synchronous vibrating system under the action of the hysteresis force are defined as
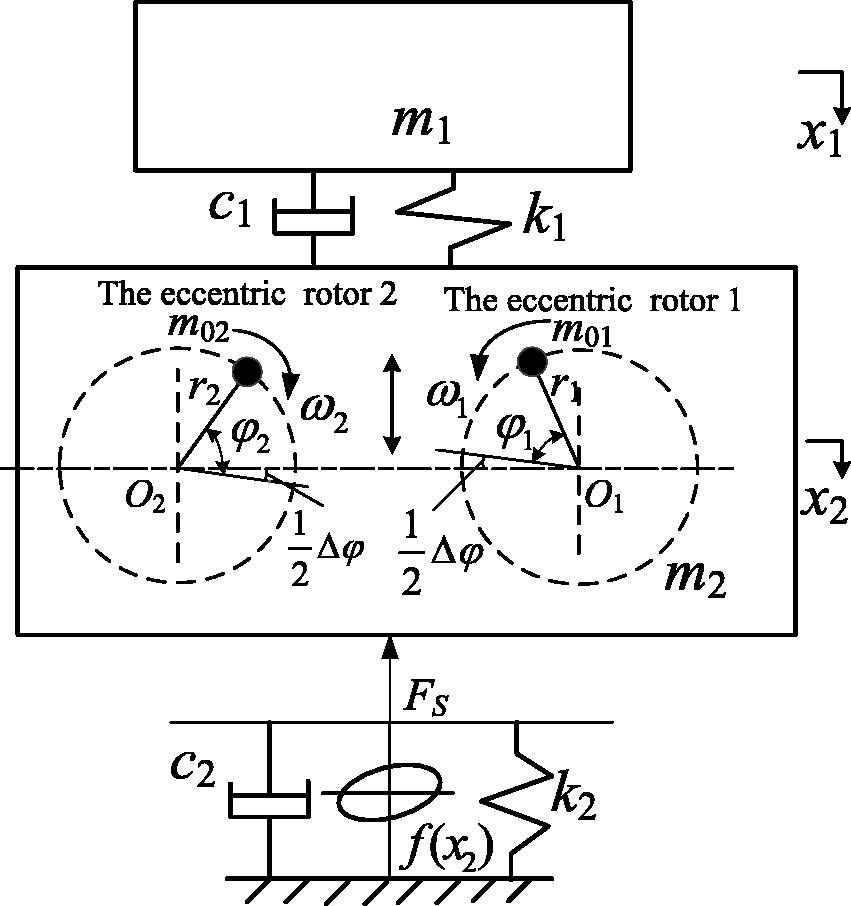
The model of the nonlinear vibration system driven by the two excited motors.
In this equation,
The hysteretic force
The hysteretic force
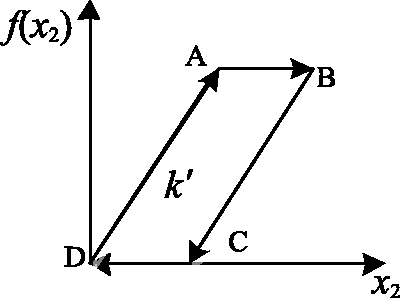
The hysteretic force with the asymmetry.
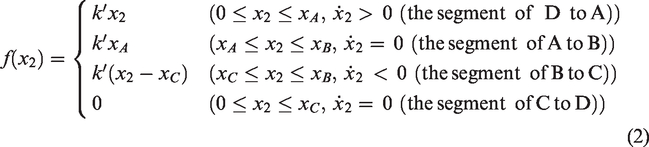
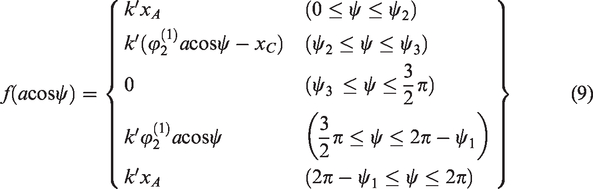
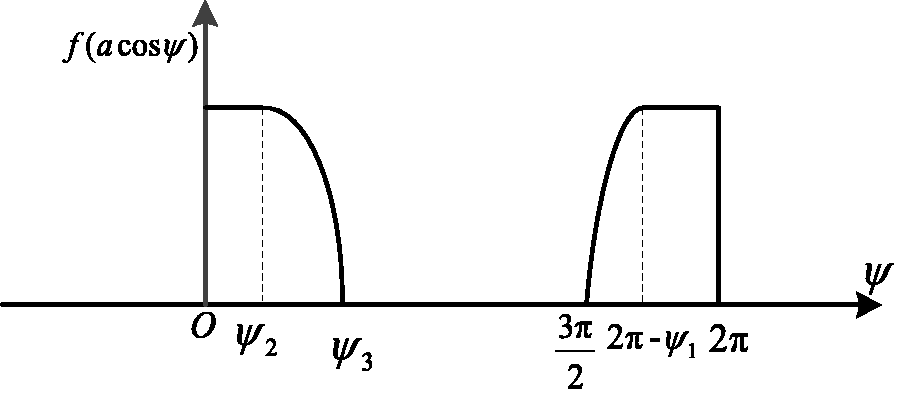
In this equation, x2 is described as the direction of displacement of the hysteretic force. f(x2) is the hysteretic force with the asymmetric quadrilateral.
The first and second equations in equation (1) can be arranged in matrix form and transformed into
In this equation,
When harmonic vibration synchronization occurs in the nonlinear vibration system driven by the two excited motors, the excitation frequency of the two excited motors must be close to the definite range of the first natural frequency of the nonlinear vibration system. When the excitation frequency of the two excited motors is close to the first natural frequency of the primary resonance for the nonlinear vibration system in the theoretical analysis, the vibration excited by the hysteretic force at the second natural frequency can be reduced. So the first approximate stable solutions of the nonlinear vibration system with the hysteretic force can be solved using nonlinear asymptotic method. The characteristic equation of equation (3) can be expressed as

In this equation,

If the mode function at the first natural frequency was defined and expressed as

Using the above equation, the mode ratio at the first natural frequency can be expressed as

In this equation, if
The vibration displacements of the vibrating body 1 and the vibrating body 2 in the nonlinear vibration system with the hysteretic force can be assumed and expressed as

In this equation,
The hysteretic force expressed as a trigonometric function.
In this equation,
The principal mass at the first natural frequency can be expressed as

In this equation,
Equation (3) on the first principal coordinate can be transformed into and expressed as
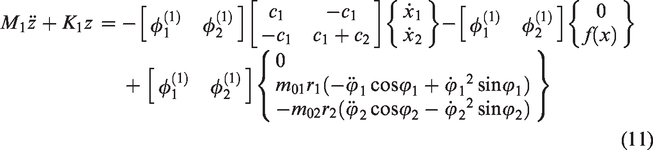
Equation (11) can be rewritten as

In this equation, the angular velocity

In the vibration equation about z, the parameter terms of the nonlinear vibration system with the hysteretic force, such as the damping term and the hysteretic force term and the exciter force terms, are of very small quantity. An approximate periodic solution z in equation (13) at the first natural frequency can be solved using nonlinear asymptotic method and has been defined as
In this equation,
Using the parameters of the hysteretic force in equation (2) and the triangular function transform of

When

In this equation,
The equivalent natural frequency

When

If

Equation (20) can be rewritten as

In this equation,

In this equation,
Theoretical analysis about harmonic vibration synchronization
Theoretical analysis about the synchronization condition
The two excited motors must done synchronous operation when the excitation frequency is close to the definite range of the first natural frequency, and harmonic vibration synchronization can be obtained in the nonlinear vibration system with the hysteretic force. Namely, the phase difference of the two eccentric rotors on the two excited motors is 0 or constant in a certain range when the excitation frequency is close to the definite range of the first natural frequency, and then the synchronous operation of the two excited motors can be realized to run safely and stably in the nonlinear vibration system with the hysteretic force. The rotor rotational motion equations (the last two formulas in equation (1)) may be transformed to obtain the synchronization condition of harmonic vibration synchronization through the theoretical analysis. In the last two formulas in equation (1),

It has been assumed that the relevant parameters of the two excited motors is equal, namely,
In this equation,

If

In equation (26),

In this equation,
If

The absolute value of H can be used to characterize the synchronization of the self-synchronous system.When
When harmonic vibration synchronization can be obtained in the nonlinear vibration system with the hysteresis force, the excitation frequency is close to the definite range of the first natural frequency (namely,

In this equation,
As shown in equations (27) to (29), if the synchronization condition H is positive, namely,
Theoretical analysis about synchronous stability condition
Using Jacobian matrix in equation (26), the synchronous stability condition of harmonic vibration synchronization can be deduced to present the synchronization stability of the nonlinear vibration system with the hysteresis force. Namely, the stable solution of the phase different for the two excited motor should be analyzed. Jacobian matrix of equation (26) can be expressed as

The characteristic equation of Jacobi matrix in equation (30) can be written as

When the real part of the characteristic root is negative in equation (31), the phase difference equation is asymptotically stable. Using Hurwits theorem, equation (32) must be satisfied and can be expressed as the following

As shown in equation (21), the equivalent natural frequency
Simulation analysis about harmonic vibration synchronization
Using the model of the nonlinear vibration system with the hysteresis force about equations (1) and (2), some parameters for the nonlinear vibration system with the hysteresis force are selected as follows m1 = 89 kg, m2 = 56 kg, k1 = 6,500,000 N/m, k2 = 4,000,000 N/m, c1 = 100 Nm·s/rad, c2 = 100 Nm·s/rad, m01 = 3.5 kg, m02 = 3.5 kg, r1 = r2 = 0.08 m, c01 = 0.01 Nm·s/rad, c02 = 0.01 Nm·s/rad, J01 = 0.01 kg·m2, J02 = 0.01 kg·m2. Using Matlab/Simlink, the response of the parameters in the model of the nonlinear vibration system with the hysteresis force can be obtained using the combination of equations (1) and (2) with the electromagnetic torque equations and the rotor motion equations about the motors. The first natural frequency
The first natural frequency of the vertical direction is 23.5 Hz for the nonlinear vibration system with the hysteresis force. Namely, When the initial phase difference of the two excited motors is −3.14 rad, such as the initial phase of the excited motor 1 is −
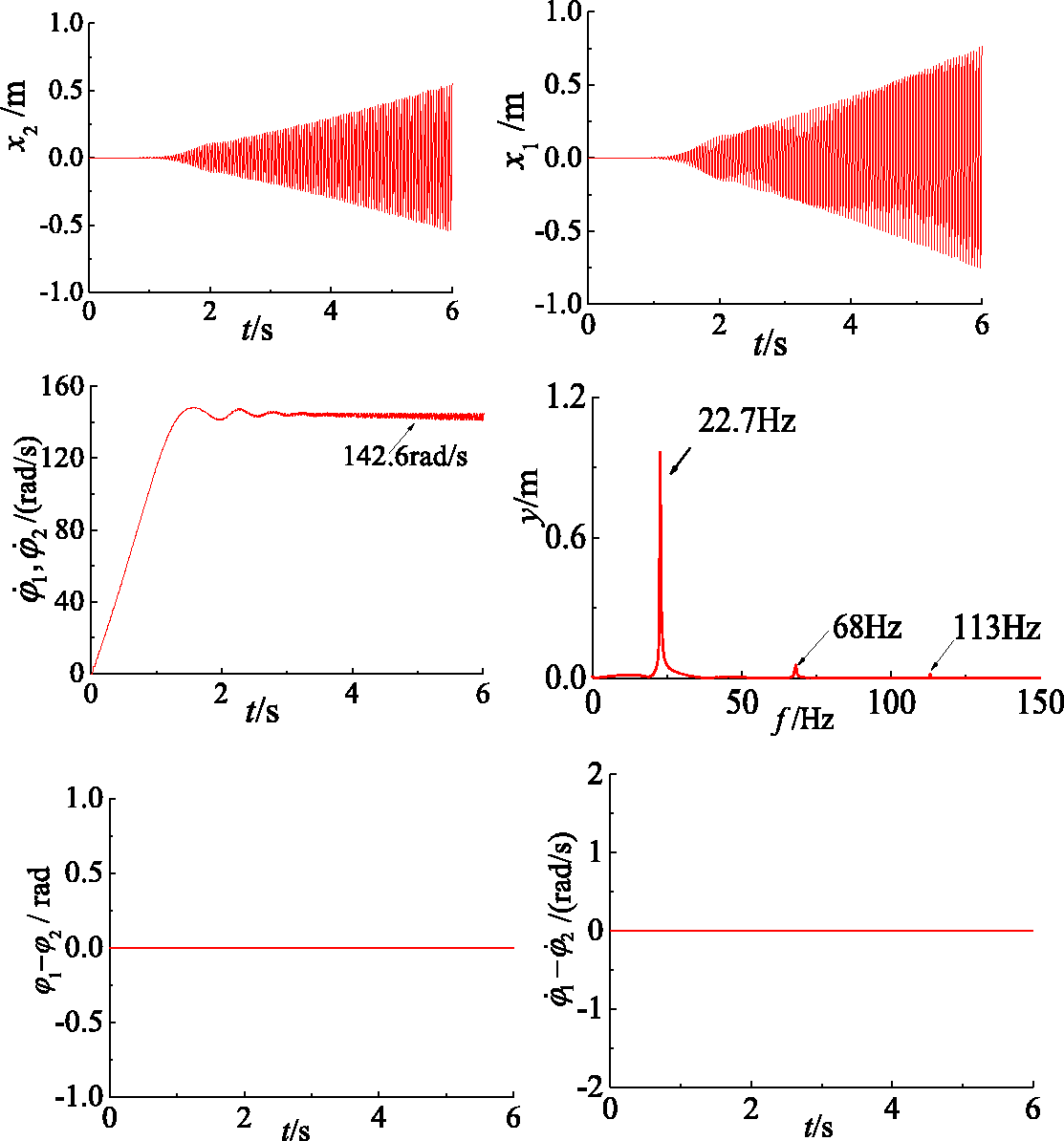
Responses and the spectrum under no difference rates conditions.
As shown in the angular velocity curves of Figures 5 to 7, when the initial phase difference of the two excited motors is within a range, the synchronous operation of the two excited motors is obtained in the nonlinear vibration system under the action of the hysteretic force with the asymmetry. The violent irregular vibration of the angular velocities is presented and then the stable values of the angular velocities are about 142.6 rad/s. As shown in Figures 5 to 7, when the initial phase difference of the two excited motors is within a range, the violent irregular vibrations of the angular velocity difference and the phase difference are presented and the angular velocity difference is stable at 0 rad/s and the phase difference is finally stable at about 0 rad or b. When the two excited motors are with the different initial angular velocities, such as the initial angular velocity of the excited motor 1 is −10 rad/s and the initial angular velocity of the excited motor 2 is 0 rad/s, the responses of the parameters for the nonlinear vibration system with the hysteretic force are shown in Figure 8.
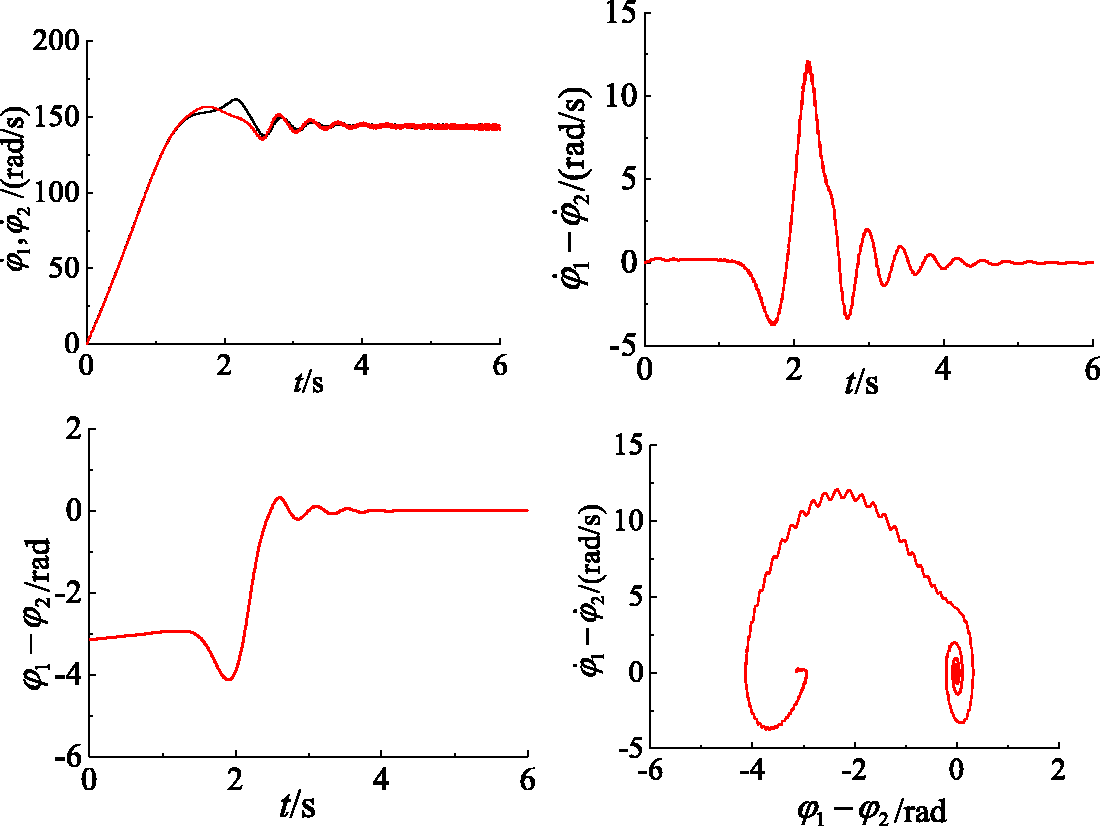
Simulation of the system under the different initial phase (- π rad) conditions.
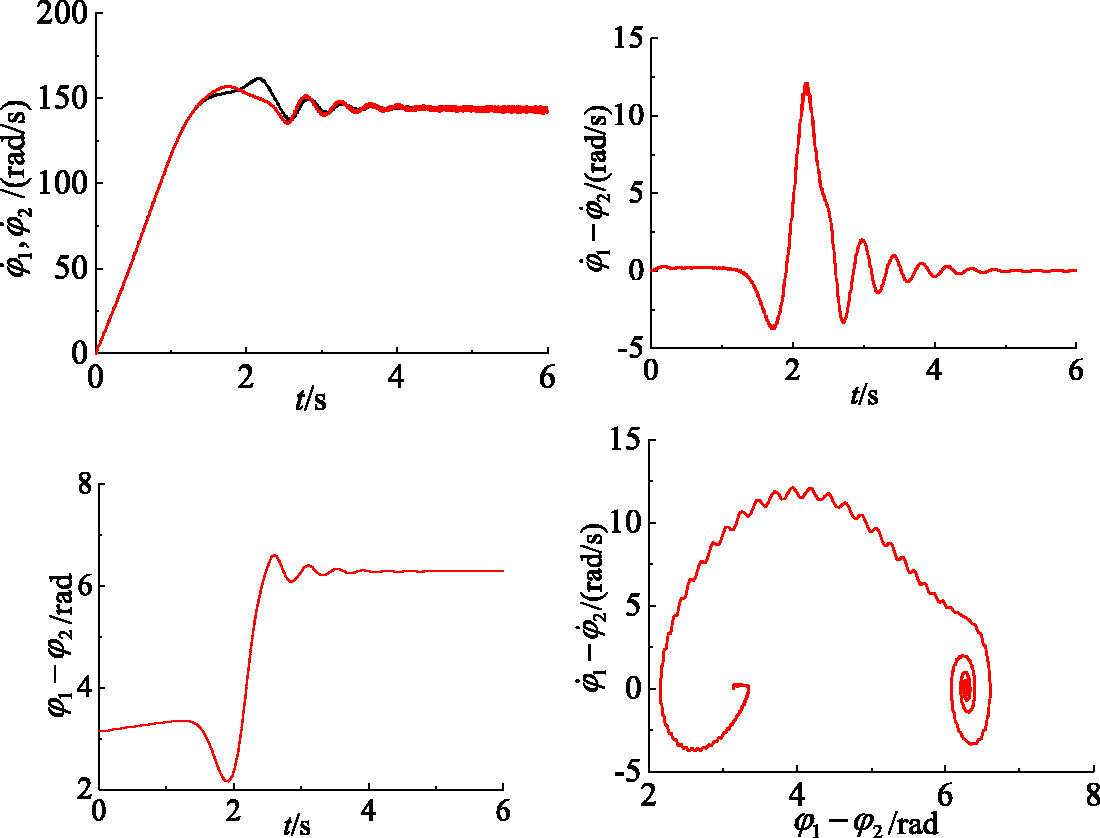
Simulation of the system under the different initial phase (π rad) conditions.
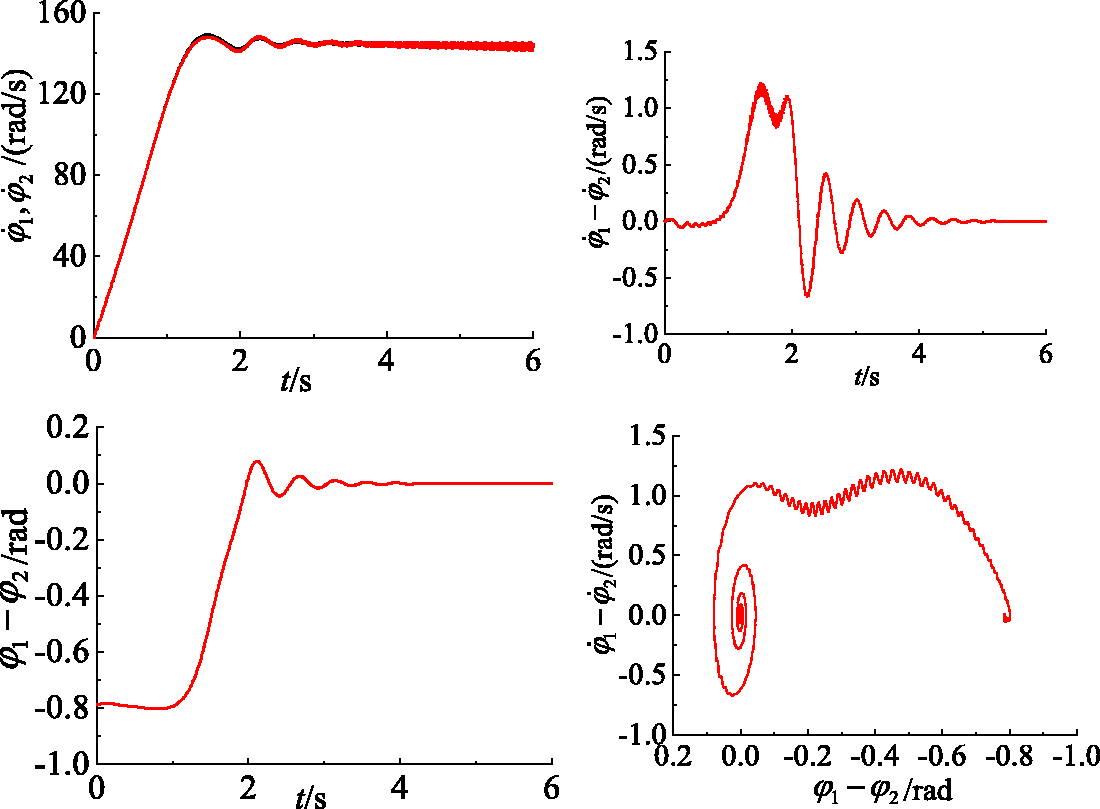
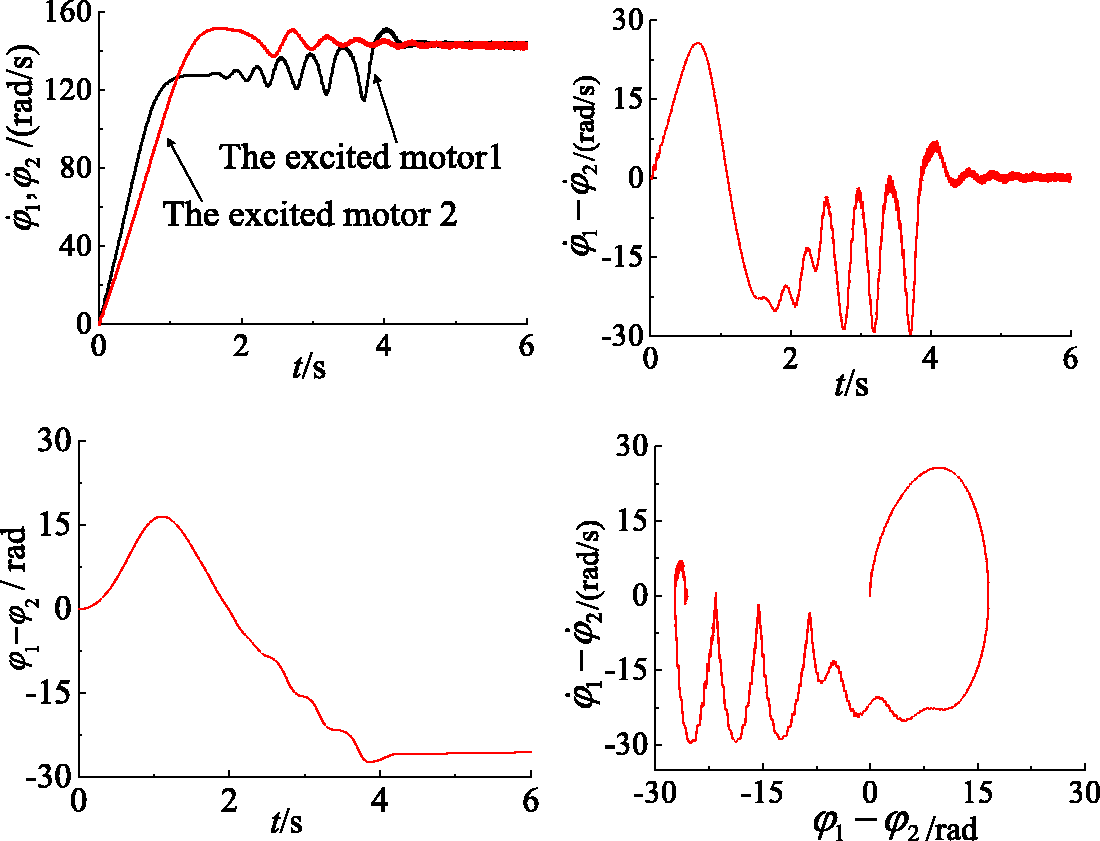
Simulation of the system under the different initial phase (- π 4 rad/s) conditions.
As shown in the angular velocity curve of Figure 8, the angular velocities are with obvious repeated shocks after 2 s and then the stable values of the angular velocities are also about 142.6 rad/s after 4 s. The excited motor 1 and the excited motor 2 do the synchronous operation, together. The synchronous operation of the two excited motors can be achieved. As shown in Figure 8, the big shocks of the angular velocity difference and the phase difference are presented for the two excited motors, subsequently. Finally, the angular velocity difference and the phase difference are also stable, such as the angular velocity difference can be stable at about 0 rad/s and the phase difference can be eventually stabilized at
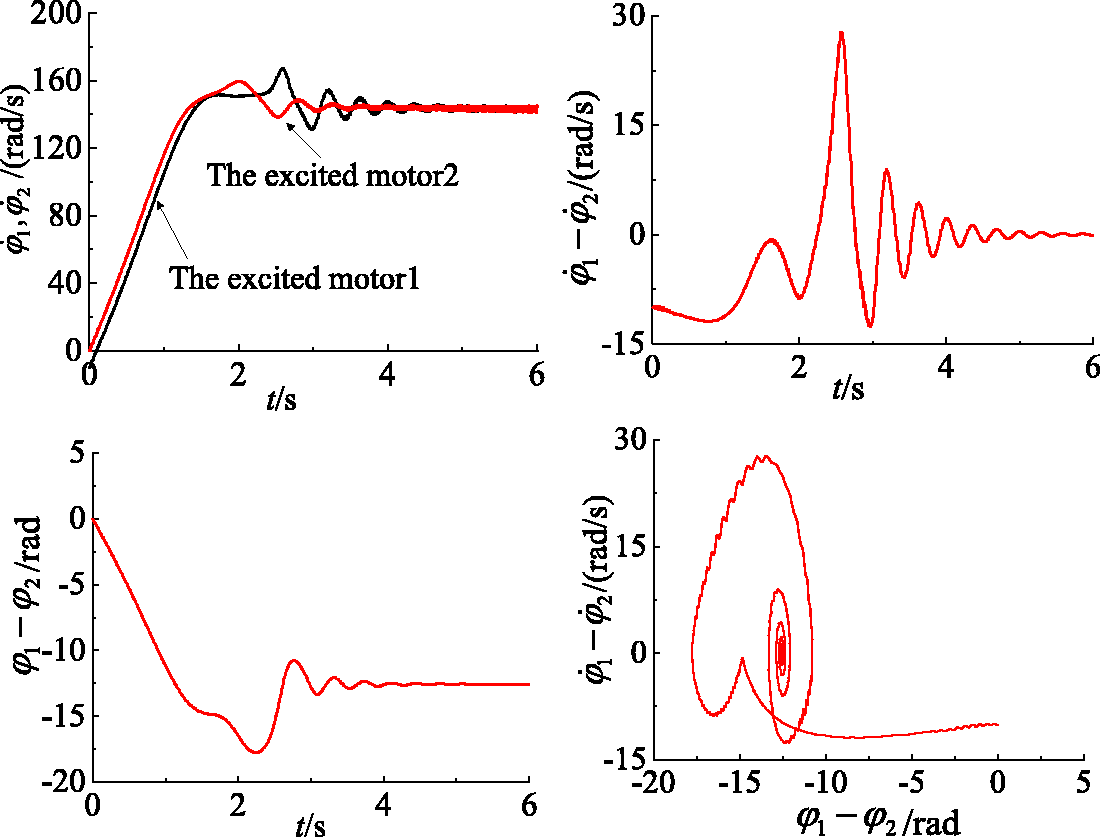
Simulation of the system under the different initial angular velocity conditions.
Simulation of the system under the different excited-motor parameters conditions.
c. When the difference rate of the excited-motors parameters is in a certain range, the responses of the parameters for the nonlinear vibration system with the hysteresis force can be obtained and shown in Figure 9. The angular velocities are with obvious repeated shocks in 4 s, and finally, the stable values of the angular velocities are also about 142.6rad/s. Finally, The angular velocity difference can be eventually stabilized at 0 rad/s and the phase difference can be eventually stabilized at
Conclusions
In this paper, the self-synchronization characteristics of the nonlinear vibration system with the asymmetrical hysteresis have been proposed when harmonic vibration synchronization occurs. Firstly, nonlinear dynamic model of the self-synchronous vibrating system is presented for the analysis of the hysteretic characteristics of the compacted soil. An approximate periodic solution for the self-synchronous vibrating system with the asymmetrical hysteresis has been investigated using nonlinear asymptotic method. Second, the synchronization condition of the two excited motors is theoretically analyzed using the rotor–rotation equations of the two excited motors, and the synchronization stability condition of the self-synchronous vibrating system with the asymmetrical hysteresis are theoretically analyzed using Jacobi matrix of the phase difference equation of the two excited motors. Thirdly, using Matlab/Simlink, the synchronous operation of the two excited motors and the synchronous stability operation of the nonlinear vibration system with the hysteretic force have been quantitatively analyzed through the difference rates of the two excited motors (including the initial phase difference, the initial angular velocity difference and the difference of the motors parameters).
Finally, it has been revealed that the synchronous operation of the two excited motors and the synchronous stability operation of the self-synchronous vibrating system with the asymmetrical hysteresis can still be achieved when the harmonic vibration synchronization of the nonlinear vibration system with the hysteretic force can occur. So the self-synchronous vibrating system under the action of the hysteretic force with the asymmetry has the ability to restore synchronization and the self-synchronous vibrating system is with the self-synchronizing characteristics.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of thisarticle: The author gratefully acknowledges that this project was supported by the National Natural Science Foundation of China (Grant No. 51605022), the Fundamental Research Funds for Beijing University of Civil Engineering and Architecture (Serial Numbers: X18096 and X18116) and the science research foundation of Beijing University of Civil Engineering and Architecture under the Project Number ZF16082.