
Abstract
The model of a clamped–clamped Euler–Bernoulli beam is presented in order to study nonlinear vibration control of electrostatically actuated nanobeam with nanocapacitive sensor, considering primary and superharmonic resonances. The capacitance of nanobeam capacitor changes with the nanobeam deformation. The nanocapacitive sensor is applied to extract vibration signals and to transform enlarged signals into controller to control nanobeam vibrations. The method of multiple scales is used to obtain the first-order approximate solutions and derive the amplitude–frequency equation. The nonlinear vibration characteristics and amplitude–frequency response of nanobeam vibration system are studied under different excitation voltage, feedback gains, and damping. The relationships between amplitude and system parameters are discussed in detail. The presented analytical and numerical simulations show that dynamic response of nanobeam is stable when the appropriate parameters are chosen. This investigation provides a better understanding of the nonlinear vibration of nanoelectromechanical systems devices based on nanobeam.
Keywords
Introduction
Nanoelectromechanical systems (NEMS) are becoming one of the most commonly used components in the field of sensing and actuating because of its compact structure, high response speed, and high accuracy. However, nonlinearity plays a negative role in the NEMS devices. Nonlinear vibration systems generally are characterized by instable response, chaos, bifurcation phenomena, and other relatively complex behaviors of vibration. In most cases, these vibration phenomena causing damage to the nanodevices arise from a large number of factors such as electric field force, nonlinear damping, and large elastic deformation. Thus, a better understanding of the nonlinear vibration systems is essential, and it is important to control nonlinear vibrations of NEMS in order to get stable vibration for the nanodevices.
Nanobeam as a fundamental part in NEMS devices can be found in sensors, actuators, resonators, and oscillators.1–4 The widespread applications of nanobeam motivate a great many investigations on the dynamic behaviors of nanobeam. For example, the Euler–Bernoulli beam theory is used to examine the influence of surface effects on the vibrational and buckling behaviors of nanobeams.5,6 Li et al. 7 employed the nonlocal elasticity theory in order to investigate steady-state resonance and stability for the transverse vibrations of a nanobeam subjected to a variable initial axial force and reported that the nonlocal nanoscale had significant effects on vibration behavior. The modified couple stress theory was applied to investigate the complex subcritical and supercritical dynamics of a parametrically excited microbeam subject to a time-dependent axial load via Ghayesh et al.8,9 Arani et al. 10 examined nonlinear vibration of a nanobeam coupled with a piezoelectric nanobeam subjected to an external electric voltage using the strain gradient theory. Han et al. 11 used multiple-scales method to investigate static bifurcation and primary resonance of a doubly clamped microbeam actuated by two symmetrical electrodes. Nayfeh and Younis12,13 presented analysis and simulations for the nonlinear response of microbeams actuated by a DC electrostatic force and an AC harmonic force to analyze the influence factors of vibration stability and the response of the amplitude and phase.
Nanobeam vibration presents clearer nonlinearity due to nanoscale effects. Therefore, to develop advanced NEMS devices, researchers have been devoted to investigating nonlinear characteristics and control methods of nanobeam vibration in recent years. Zhang et al. 14 used piezoelectric actuator to examine the adaptive vibration control of microcantilever beam in NEMS. Liu et al. 15 studied the nonlinear vibration control of beam with piezoelectric sensor and actuator using the piezoelectric optimal delayed feedback control. The nonlocal theory and Timoshenko beam theory were used to investigate the nonlinear vibration of the piezoelectric nanobeams subjected to an applied voltage.16,17 Pourseifi et al. 18 used a linear classical optimal control algorithm with a time-varying gain matrix and displacement–velocity feedback in order to suppress the vibration of nanotube structure. Maccari 19 dealt with the vibration control of a cantilever beam considered the primary resonance under the state feedback control with a time delay and concluded that the appropriate time delay and feedback gains can perform the vibration control and amplitude suppression. Moeenfard et al. 20 used a homotopy perturbation method to analyze the nonlinear free vibrational behavior of Timoshenko microbeams considering the effects of rotary inertia. In this article, a control method of nanocapacitive sensor is employed to control the nonlinear vibration of nanobeam.
The nonlinear control of nanobeam vibration needs signals containing the dynamic information of nanobeam. However, it is not easy to extract the vibration information. Nanocapacitive sensors, which have played an important role in the nonlinear dynamic investigation of NEMS, have characteristics of the higher sensitivity and resolution, lower power consumption, and lower temperature cross-sensitivity compared with other sensors.21,22 Many nanocapacitive sensors, built on the measurement of motion, acceleration, and displacement,23,24 have been developed and applied as chemical sensors, biosensors, and other sensors as well.25,26 The capacitive sensing is achieved by using the variable capacitance feature for control circuits and it adds no mass to the controlled structure. 27 In this article, the capacitive sensor is applied to extract the vibration signals of nanobeam and to transform enlarged singles into the controller as control information to eventually achieve the effective control performances for the nanobeam nonlinear vibration.
The purpose of this article is to investigate the capacitive control of nonlinear vibration of electrostatically actuated nanobeam with both the primary resonance and superharmonic resonance taken into consideration. The capacitance of nanobeam capacitor formed between the nanobeam and a grounded substrate changes with the nanobeam deformation. The nanocapacitive sensor is applied to extract vibration singles and produce the single voltage as control information transformed into the controller to control the nonlinear vibration of nanobeam. The equations of motion for nanobeam with control force are obtained based on the Hamilton’s principle and the clamped–clamped Euler–Bernoulli beam. The multiple scales method is used to solve the first-order approximate solutions and the amplitude–frequency response equation is derived. In order to control the nonlinear vibration, it is necessary to investigate the effects of excitation voltage, feedback gains, damping, and other system parameters on the vibration response.
Nanobeam nonlinear vibration model
A flexible nanobeam suspended over a grounded substrate is considered (Figure 1). The distance between the nanobeam and the upper grounded substrate is equal to that between the nanobeam and the lower grounded substrate. The nanobeam is electrostatically actuated by applying DC excitation voltage and AC excitation voltage. The value of nanobeam length is relatively longer compared with its width and thickness. The nanobeam is modeled as an Euler–Bernoulli beam.
Nonlinear vibration model of nanobeam.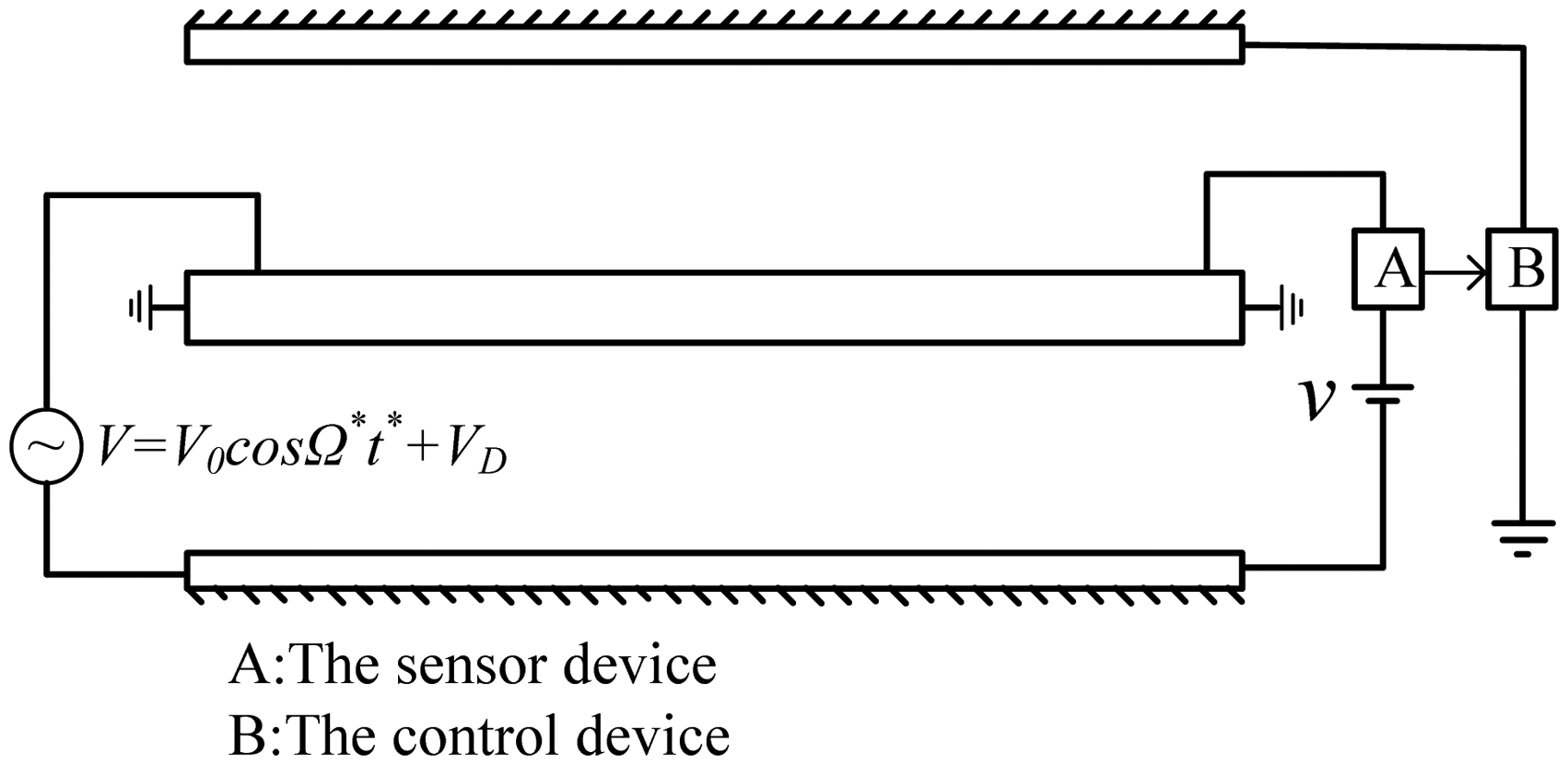
The control circuit of nanocapacitive sensor consists of the nanobeam capacitor, the control voltage, and the resistance source, as shown in Figure 2. The control voltage v is applied to the circuit. The nanobeam capacitance, formed between nanobeam and a grounded substrate, changes with nanobeam vibration. The relationship between the change in capacitance and the nanobeam deflection can be written as
Control circuit of nanocapacitive sensor.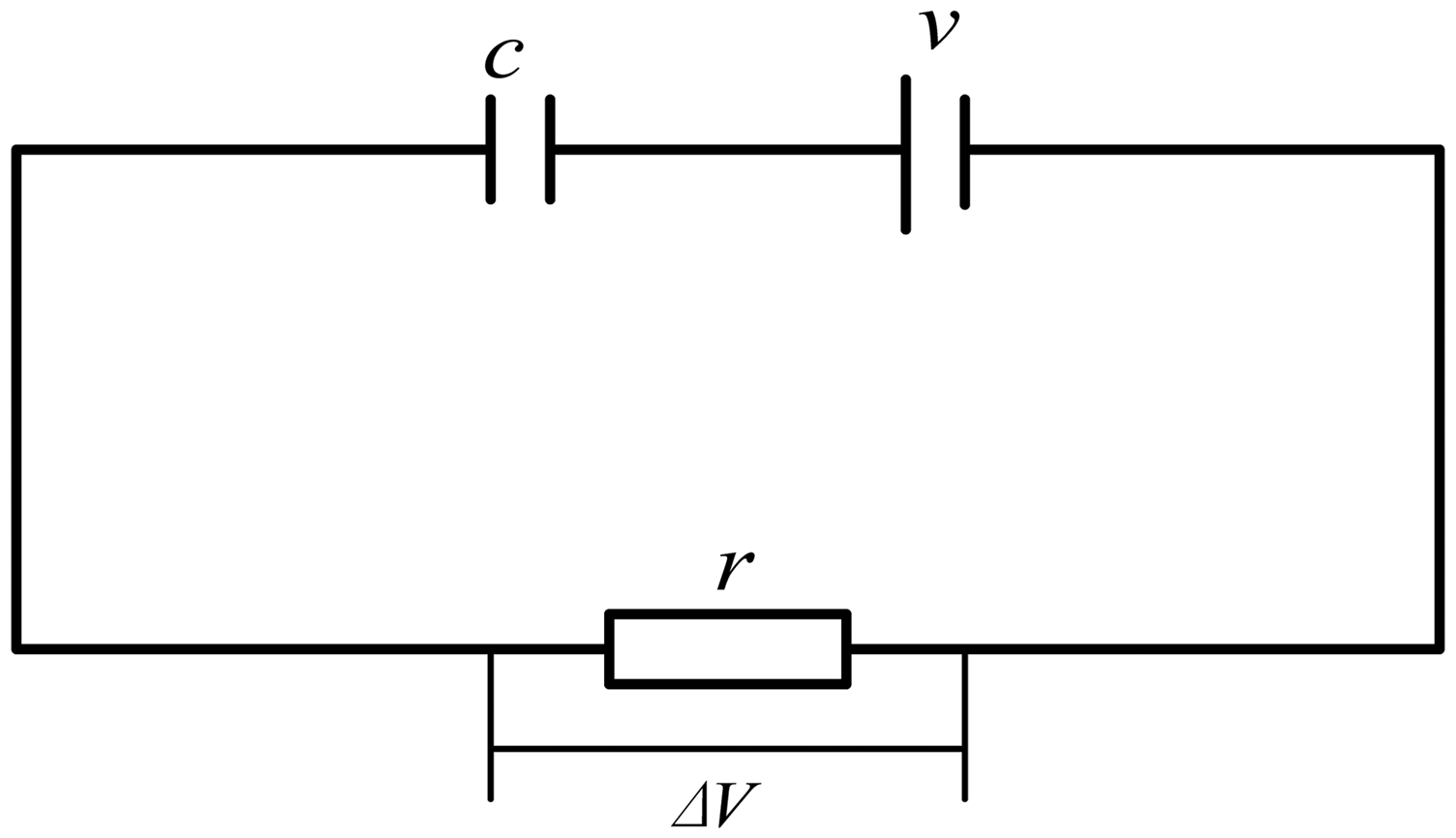

The voltage V1 of the nanobeam capacitor changing with the nanobeam deflection is given as follows

The signal voltage ΔV is produced in the circuit and applied to control the nonlinear vibration of nanobeam as follows

The electrostatic driving force fe and the electrostatic control force fc are considered as follows
28


The nanobeam is actuated by applying a voltage,

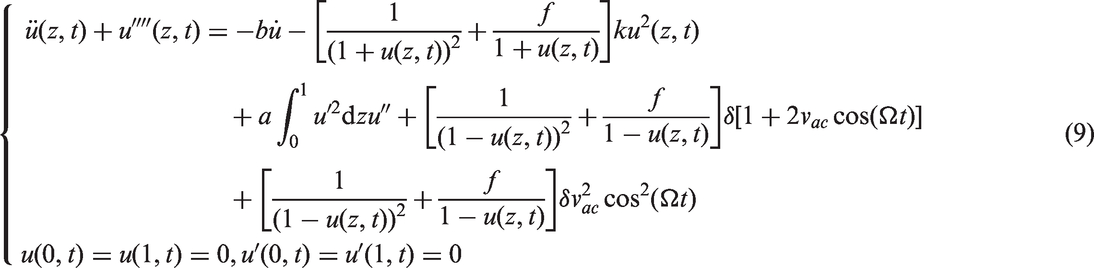
Using generalized Hamilton’s principle, the nonlinear vibration equation of nanobeam with control force and boundary conditions are written as
16

The dimensionless variables are now introduced

The expansion of Taylor series is used for the nonlinear terms of

Primary resonance for
In this section, just the static and the first harmonic components in the square terms of the excitation voltage are taken into consideration. Higher orders of dimensionless displacement of nanobeam in the first harmonic component are neglected, because the deflection of nanobeam is indefinitely small. Equation (10) can be written as

The multiple scales method is applied to obtain the first-order approximate solutions of equation (11)
29
. One yields

Substituting equation (12) and the time derivatives into equation (11) and equating terms of the same order of ɛ, the approximation equations and boundary conditions are given by


In this section, for the case of primary resonance, that is, when the excitation frequency is near the natural frequency, a detuning parameter σ is introduced. The nearness of the excitation frequency is considered as

The solutions of equation (13) are assumed to be


Replacing equations (16) and (17) into equation (14), the secular terms are collected and set equal to zero. One can notice that there are additional secular terms for the excitation frequency near the natural frequency. By using the solvability condition and stating that the right-hand side to be orthogonal to every solution of the homogenous problem, one obtains
28

Expressing Ak in polar form, it is given by

Substituting Ak into equation (18) and separating the real and imaginary parts, the amplitude ak and phase γk of the response are given as the following polar form of modulation equations


When the nonlinear term vk1 > 0, the nanobeam vibration behaves as hard nonlinearity. When the nonlinear term vk1 < 0, the nanobeam vibration behaves as soft nonlinearity. When the nonlinear term vk1 = 0, the nanobeam vibration is linear. The critical control voltage which insures that the vibration is linear results from vk1 = 0

The critical control voltage is a function of DC excitation voltage, feedback gains, and nanobeam parameters.
Steady-state solutions to primary resonance
Steady-state solutions to equation (14) for the primary resonance corresponding to the fixed points
30
of equations (20) and (21) can be obtained by setting D1ak = D1γk = 0. That is


From equations (23) and (24), the amplitude–frequency response equation is obtained

Letting

The derivative of equation (26) with respect to σ is gotten. Letting

Replacing equation (27) into equation (24), and assuming that

Then, the peak amplitude for the primary resonance ak max is obtained

The stability of solutions is determined by the eigenvalues corresponding to the Jacobian matrix obtained from equations (20) and (21).

The corresponding eigenvalues of

The sum of two eigenvalues is −mk. mk is always greater than zero, so the sum of two eigenvalues is negative. Accordingly, at least one of the two eigenvalues will always have a negative real part. Based on the analysis mentioned above, the sufficient conditions guaranteeing system stability are nk1 > 0 and mk > 0. Unstable periodic solution corresponding to a saddle is nk1 < 0. The value of nk1 is positive when there is no solution of equation nk1 = 0, where a saddle-node bifurcation occurs.
Superharmonic resonance for
This section investigates the case in which there is no DC excitation voltage, (

The method of multiple scales is applied to equation (32).
29
Replacing equation (12) and the time derivatives into equation (32), and equating coefficients of the same order of ɛ, the approximation equation and boundary conditions can be expressed as


In this section, the excitation frequency near half the natural frequency,


Substituting equations (35) and (36) into equation (34), the secular terms are collected and set equal to zero. One obtains
28

Replacing the polar form of Ak into equation (37) and separating the real and imaginary parts of the secular terms equation, the amplitude ak and phase γk of the response are given as the following polar form of modulation equations


When the nonlinear term vk2 > 0, the nonlinearity of system vibration behaves as hard spring. When the nonlinear term vk2 < 0, the nonlinearity of system vibration behaves as soft spring. When the nonlinear term vk2 = 0, the system vibration behaves as linear spring. The critical control voltage is given by

The critical control voltage is a function of the amplitude of AC excitation voltage, feedback gains, and the parameters of nanobeam.
Steady-state solutions to superharmonic resonance
For the superharmonic resonance, steady-state solutions to equation (34) which correspond to the fixed points
30
of equations (38) and (39) can be obtained by setting D1ak = D1γk = 0. That is


The amplitude–frequency response equation for the superharmonic resonance is obtained as follows

The amplitude–frequency response equation is a function of the detuning parameter, feedback gains, excitation voltage, and parameters of nanobeam. Letting

The derivative of equation (44) with respect to σ can be gotten. Letting

Substituting equation (45) into equation (42), and assuming that

Solutions of the peak amplitude ak max for the superharmonic resonance result from equation (46) as follows

The stability of the solutions is determined by the eigenvalues of corresponding Jacobian matrix of equations (38) and (39). The corresponding eigenvalues are the roots of


The sum of two eigenvalues is −mk. mk is always greater than zero, so the sum of two eigenvalues is negative. Accordingly, at least one of the two eigenvalues will always have a negative real part. Based on the analysis mentioned above, the sufficient conditions guaranteeing system stability are nk2 > 0, mk > 0. Unstable periodic solution corresponding to a saddle is nk2 < 0. The value of nk2 is positive when there is no solution of equation nk2 = 0, where a saddle-node bifurcation occurs.
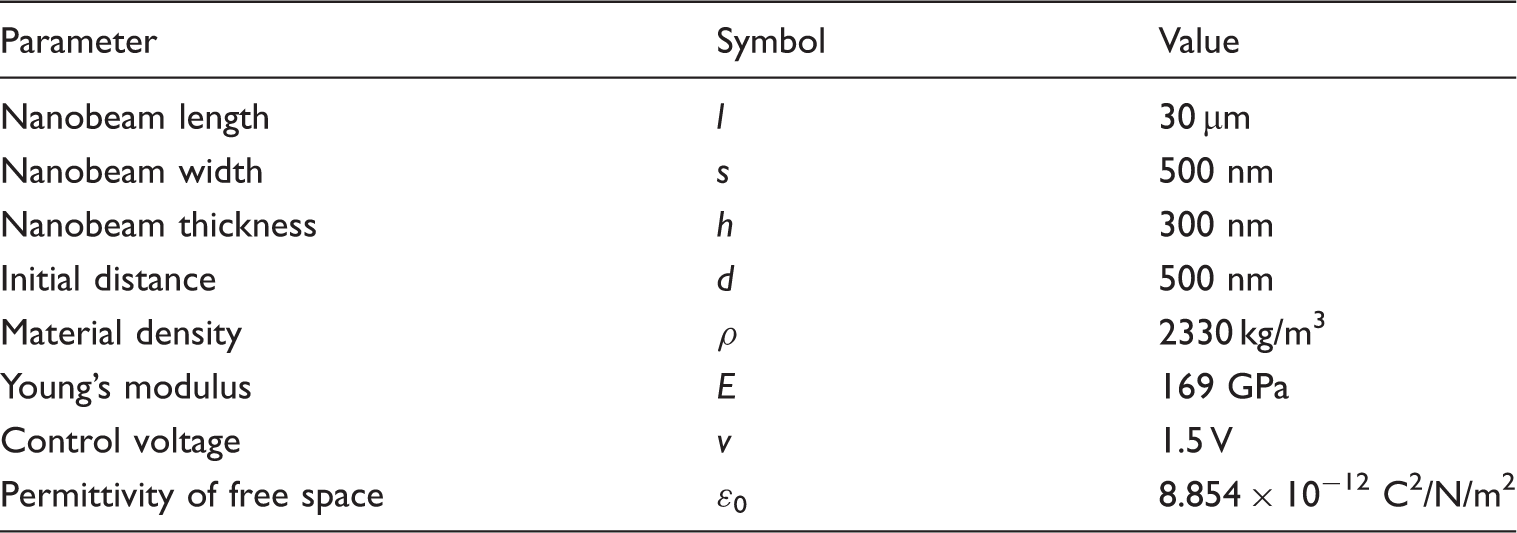
Case study
Physical characteristics of nanobeam.
The dynamics behavior of electrostatically actuated nanobeam for primary resonance of the first mode is investigated. Figure 3 shows a set of curves of amplitude–frequency response corresponding to different DC excitation voltage of primary resonance for the first mode. When the values of DC excitation voltage VD are 3.0 V and 2.5 V, the vibration response is unstable, there is the multisolution phenomenon, and the nonlinear vibration of system behaves as the characteristics of soft spring. However, when DC excitation voltage decreases to 2.0 V, the multisolution phenomenon disappears, and the vibration is stable.
Amplitude–frequency curves of primary resonance for different DC excitation voltage for mode 1 (k = 1).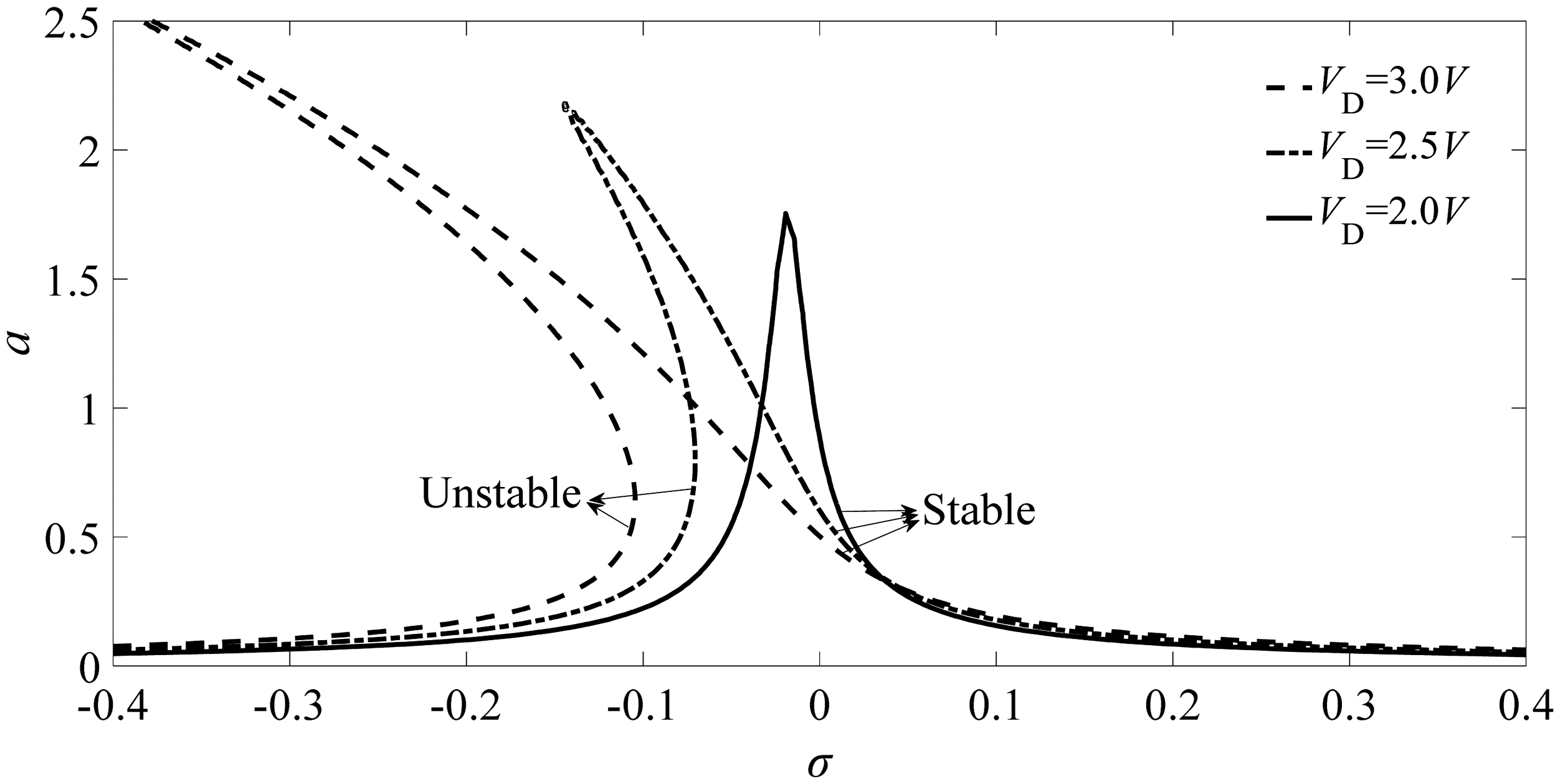
Figure 4 shows a set of curves of amplitude–frequency response for the first mode of primary resonance, corresponding to different amplitude of AC excitation voltage. There are three solutions when the values of amplitude of AC excitation voltage V0 are set to 2.2 V and 1.8 V. The nanobeam vibration is unstable. The point of the peak amplitude shifts to the right and the nonlinear vibration of system behaves as characteristics of hard spring. When the amplitude of AC excitation voltage is 1.4 V, there is no multisolution phenomenon. The vibration is stable. As the amplitude of AC excitation voltage continues to decrease to 1.1 V, there is no shift. From the figure, it is also obtained that the peak amplitude increases with the increase in amplitude of AC excitation voltage.
Amplitude–frequency curves of primary resonance for different amplitude of AC excitation voltage for mode 1 (k = 1).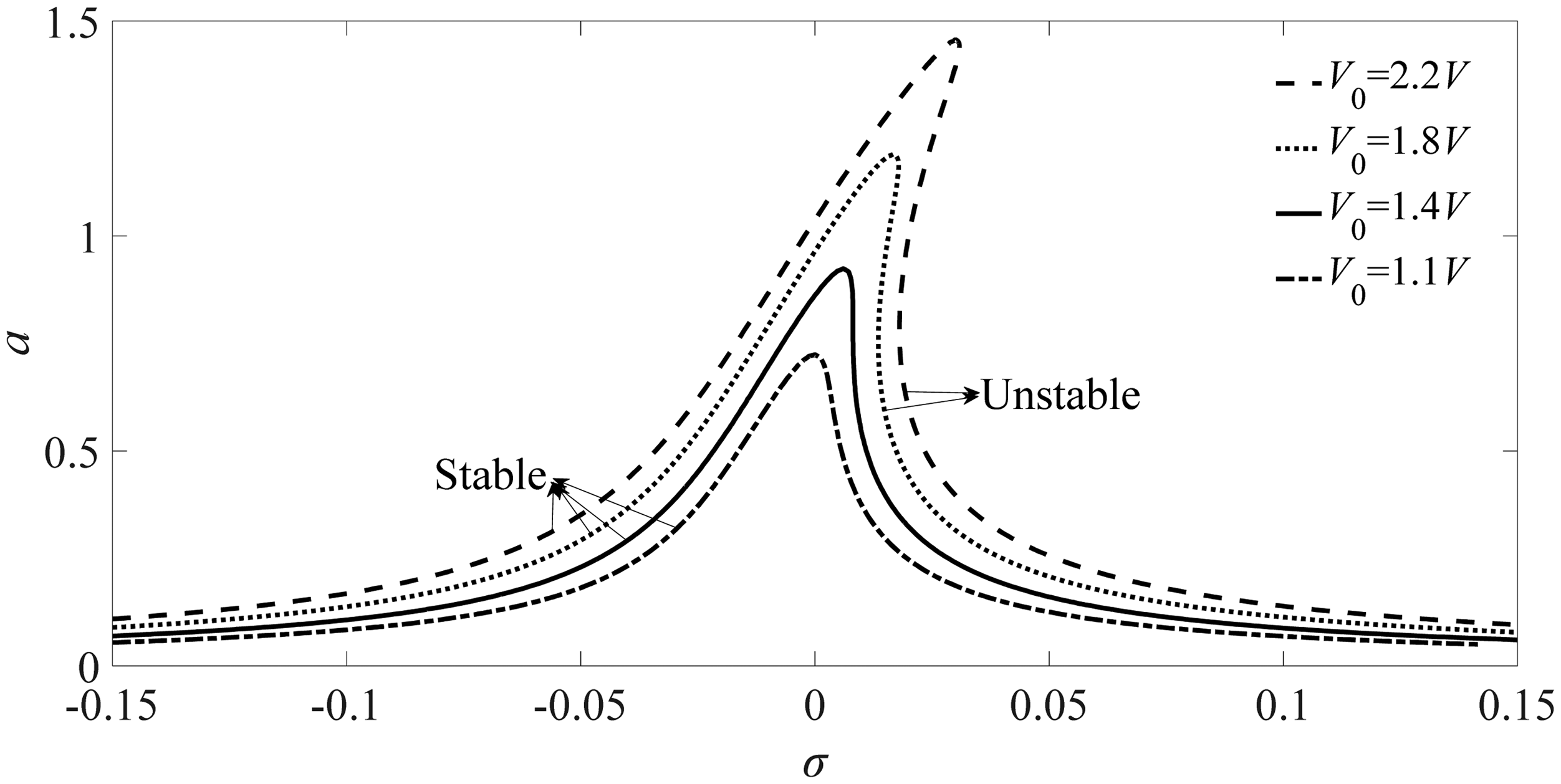
For primary resonance, amplitude–frequency response curves corresponding to different dimensionless damping for the first mode are shown in Figure 5. The picture illustrates that dimensionless damping b has a positive influence on the peak amplitude and the vibration response. The peak amplitude decreases with the increase in the dimensionless damping. When the values of dimensionless damping are 0.014 and 0.021, there is multisolution phenomenon. However, as b is greater than 0.028, the multisolution phenomenon vanishes. In this picture, it also shows that the shift to the right for the point of the peak amplitude becomes smaller when dimensionless damping increases. Thus, the dimensionless damping can soften the nonlinearity of nanobeam vibration.
Amplitude–frequency curves for different dimensionless damping of primary resonance for mode 1 (k = 1).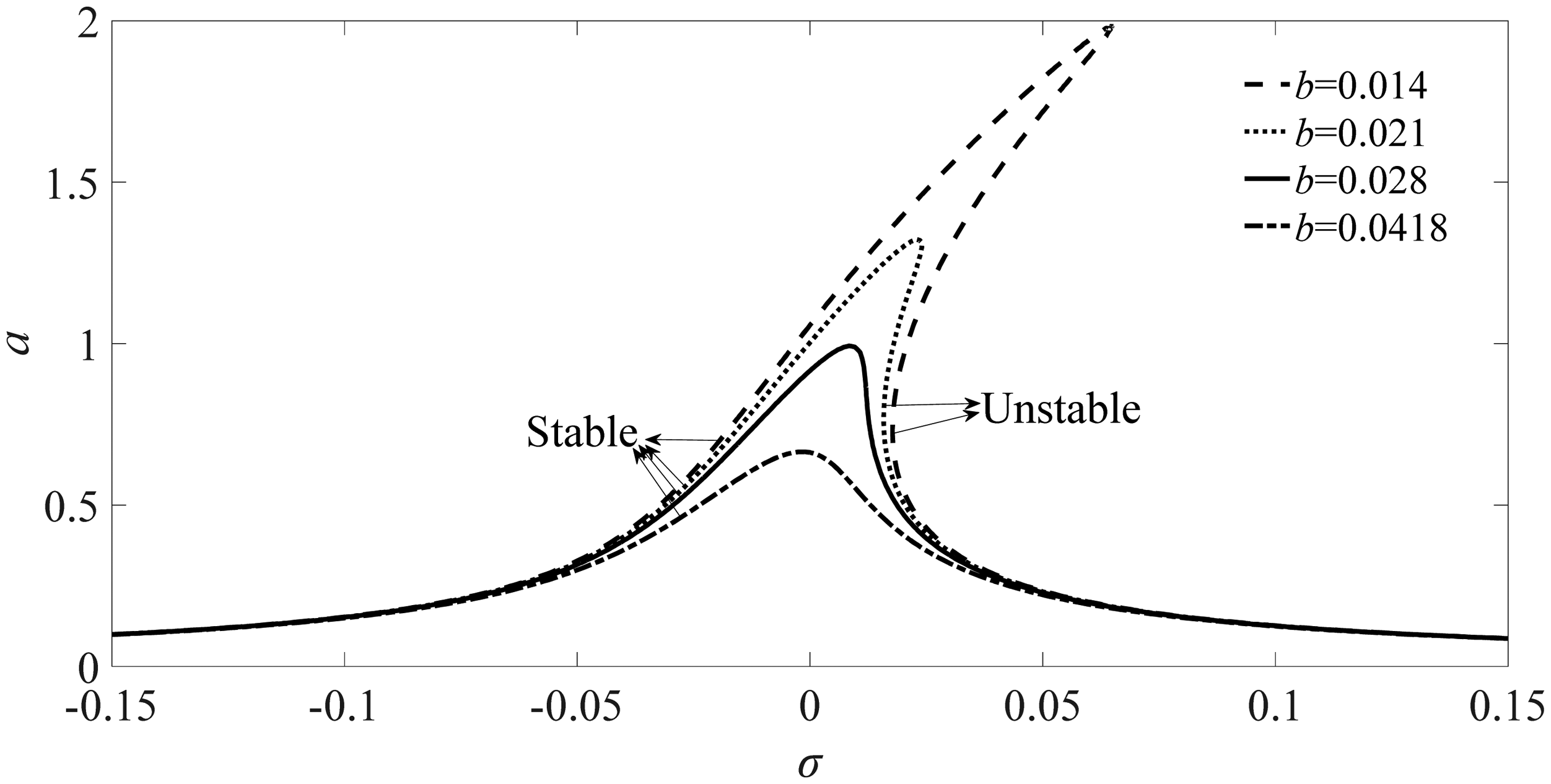
Figure 6 shows curves of amplitude–frequency response of primary resonance for the first mode, corresponding to different feedback gains. There is no obvious change for the peak amplitude as the feedback gains K vary. For K = 54, 56, there are multisolution phenomena. The vibration is unstable. The point of peak amplitude shifts to the right when K = 54, the nonlinear vibration of system behaves as characteristics of hard spring. However, the point of peak amplitude shifts to the left when K = 56, the nonlinear vibration of system behaves as soft spring characteristics. However, the vibration presents linear characteristic when feedback gains is equal to 55. Thus, it can be concluded that the characteristics of nonlinear vibration changes with feedback gains varying.
Amplitude–frequency curves of primary resonance for different feedback gains for mode 1 (k = 1).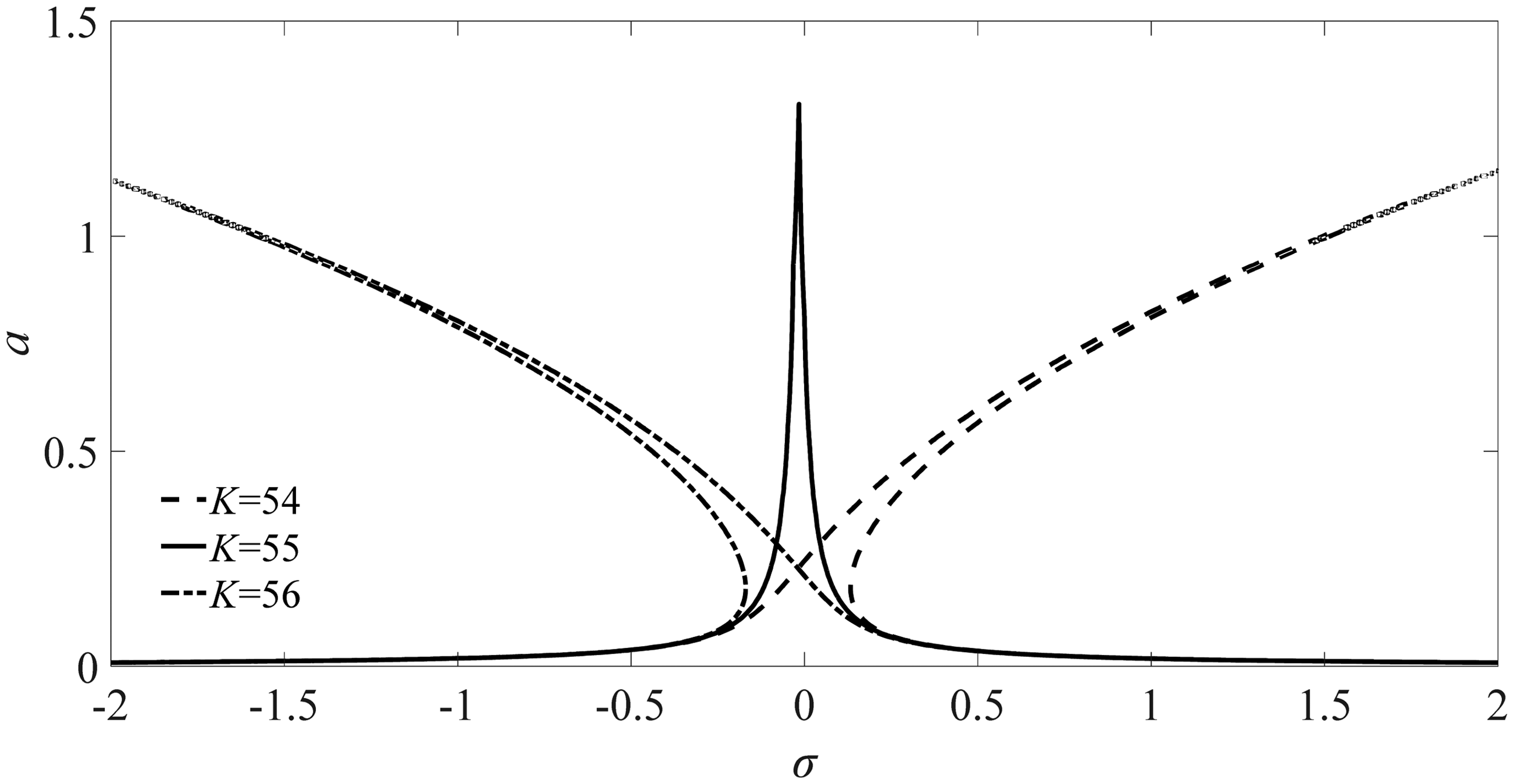
From equation (29), it can be obtained that the peak amplitude is the function of nanobeam parameters, damping, and excitation voltage. Figures 7 and 8 illustrate the curves of the peak amplitude of primary resonance varying with the nanobeam length for different damping and excitation voltage, for the first mode. For the fixed value of nanobeam length, the peak amplitude ascends with the increase in excitation voltage and decreases with the increase in damping. When the excitation voltage and damping are fixed, the peak amplitude rises with nanobeam length growing.
Curves of the peak amplitude of primary resonance varying with nanobeam length for different dimensionless damping for mode 1 (k = 1). Curves of the peak amplitude for primary resonance varying with the nanobeam length for different amplitude of AC excitation voltage for mode 1 (k = 1).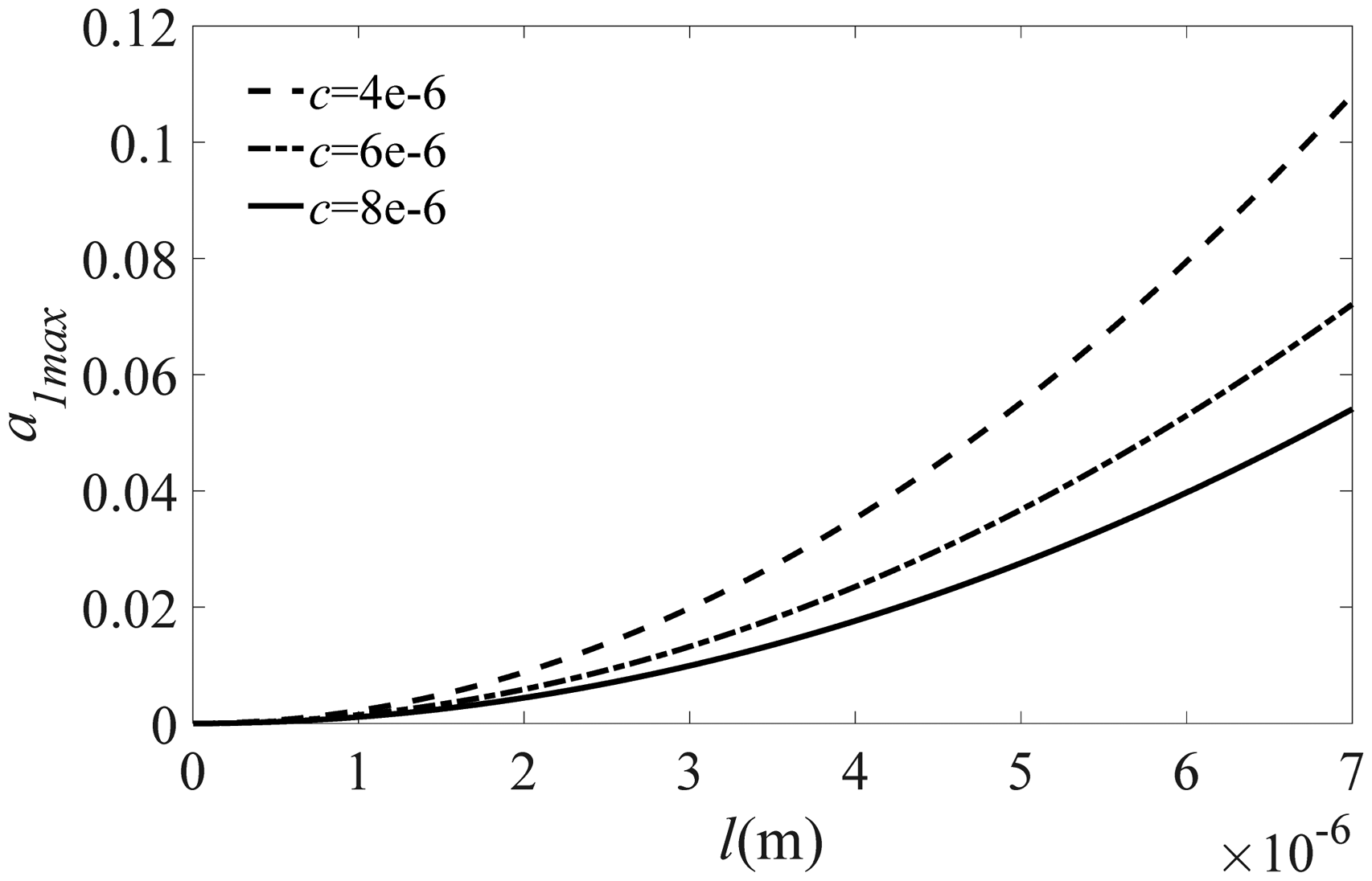
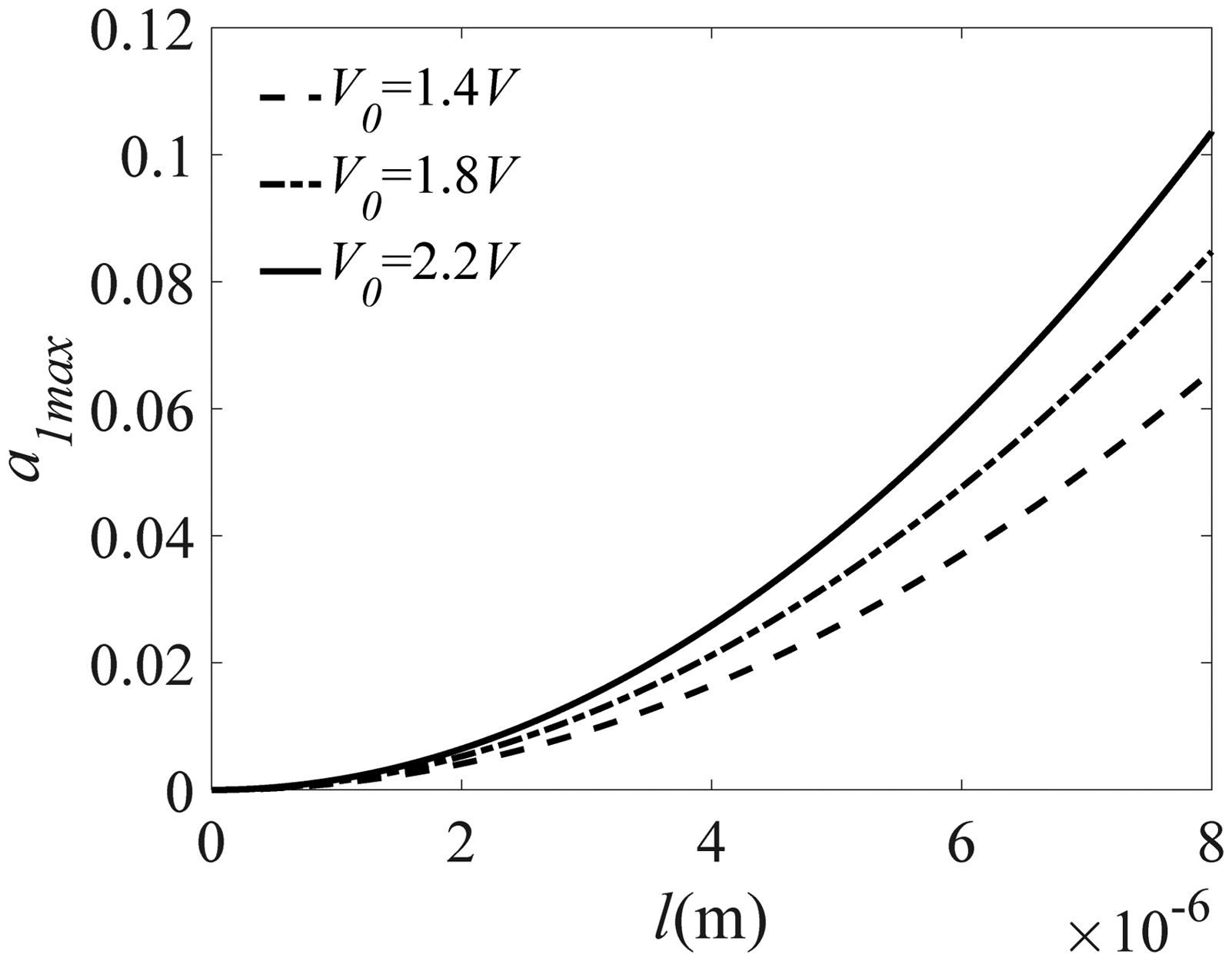
Figure 9 describes the nonlinear term of primary resonance varying with the nanobeam length for different feedback gains for mode 1. The picture shows that for a fixed value of nanobeam length, the nonlinear term vk1 grows with the increase in the feedback gains. Nonlinear term ascends as the nanobeam length rises, with a fixed value of feedback gains.
Nonlinear term of primary resonance varying with the nanobeam length for different feedback gains for mode 1 (k = 1).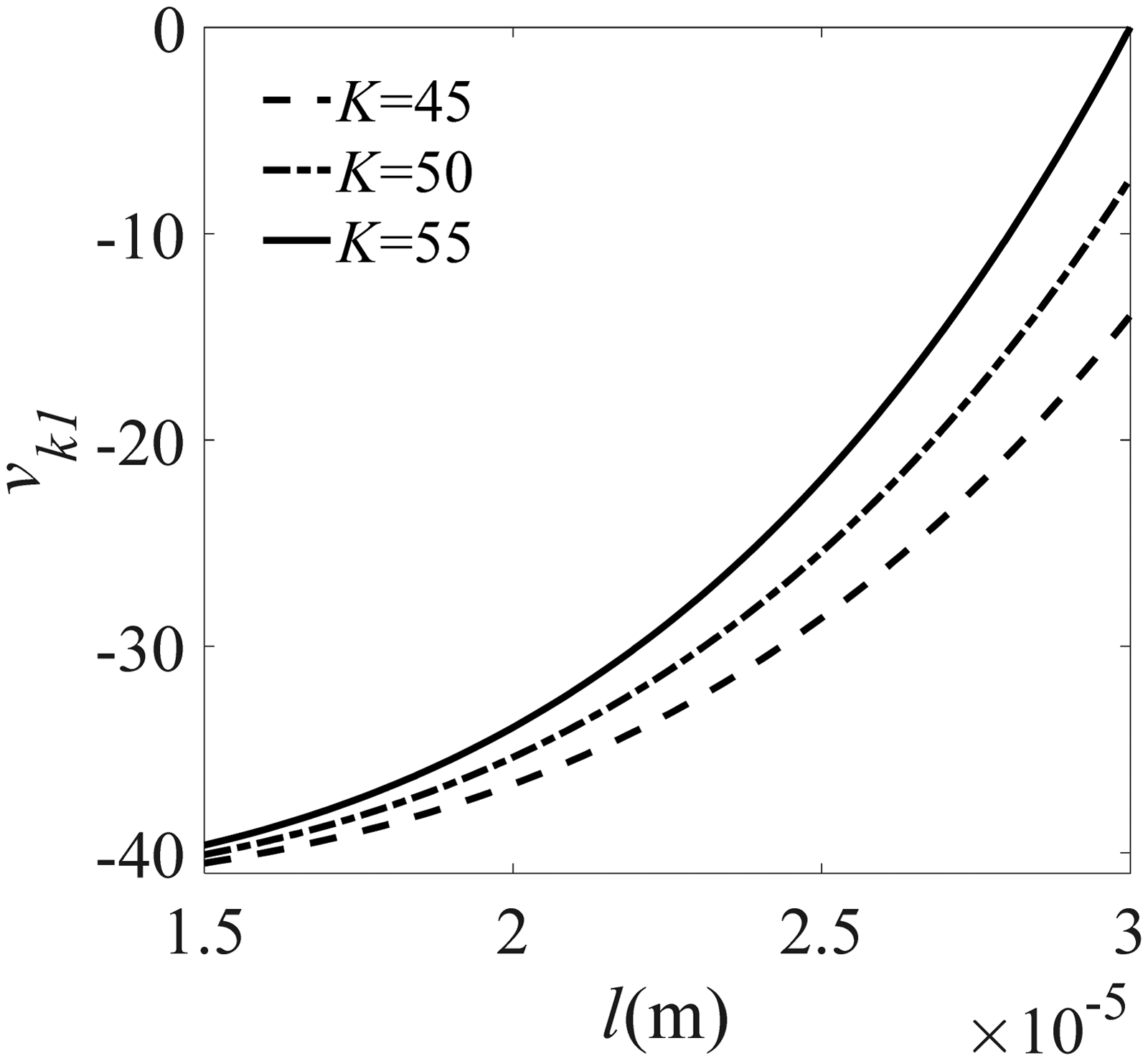
Figure 10 shows the curves of the critical control voltage of primary resonance varying with the nanobeam length for different feedback gains for the first mode. The critical control voltage vc1 equal to zero insures that the vibration response is linear. The critical control voltage declines with the feedback gains increasing. With a fixed value of feedback gains, the critical control voltage reduces as the nanobeam length grows.
Curves of the critical control voltage of primary resonance varying with the nanobeam length for different feedback gains for mode 1 (k = 1).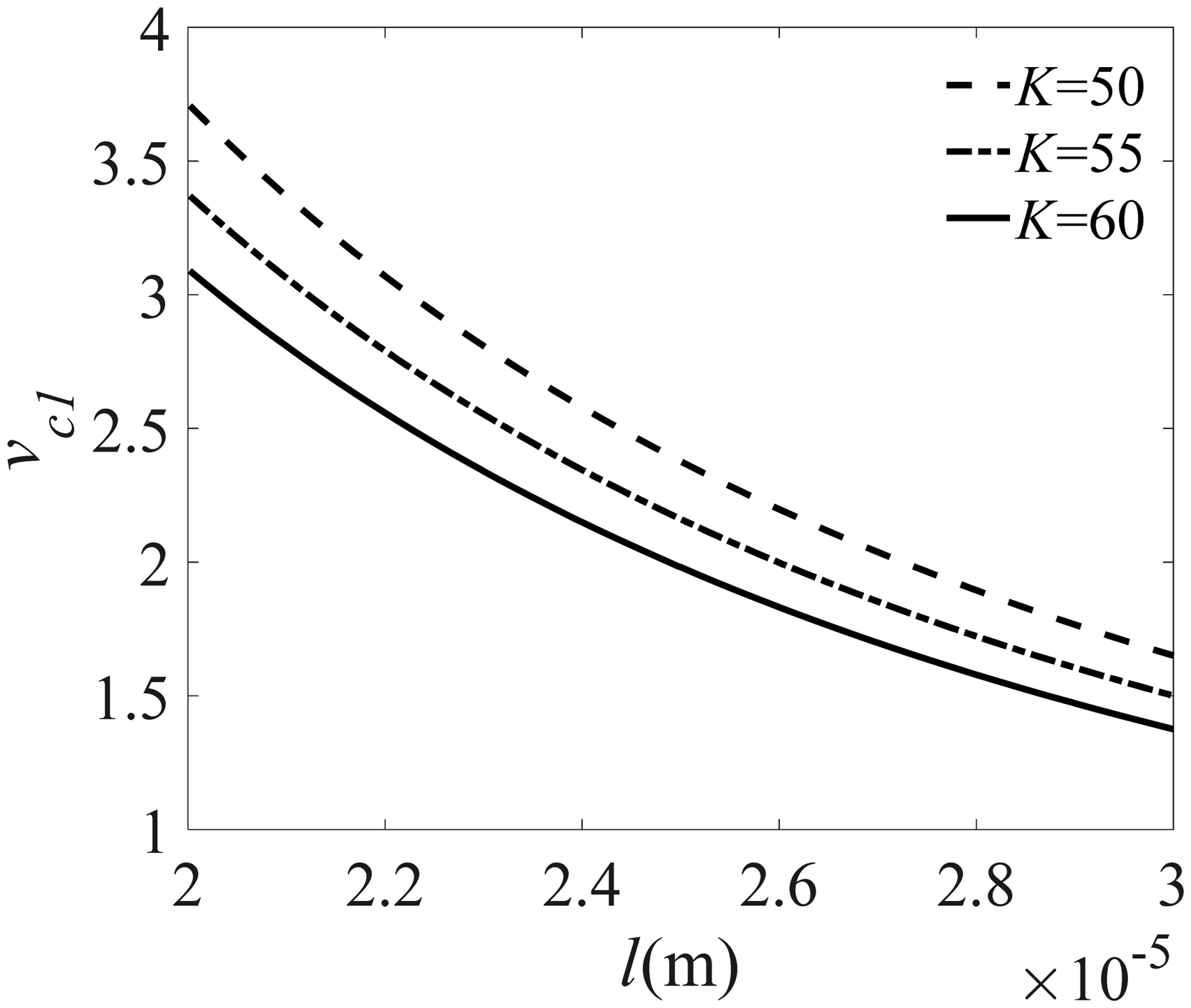
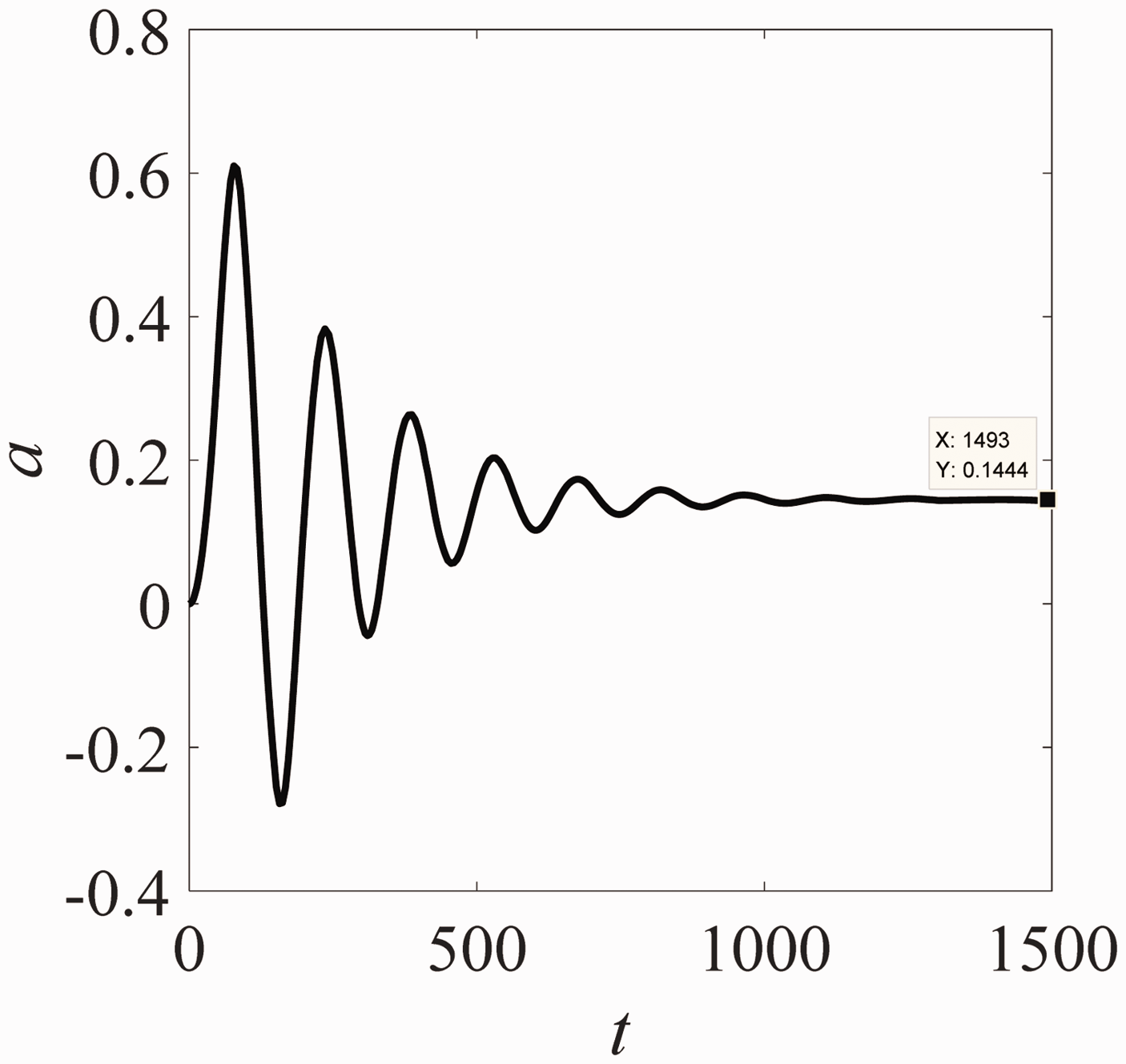
Figures 11 and 12 depict the stability of solutions for primary resonance with initial conditions of zero, for mode 1. Pictures of phase–amplitude and time–amplitude response are obtained from equations (20) and (21) with the initial values of amplitude and phase equal to zero, using the method of MATLAB ode45. It indicates that the vibration response with control finally tends to be stable, and steady-state solutions to the first mode are a1 = 0.1447, γ1 = 3.067.
Phase–amplitude response of primary resonance with zero initial conditions for mode 1 (k = 1). Time-amplitude response of primary resonance with zero initial conditions for mode 1(k = 1).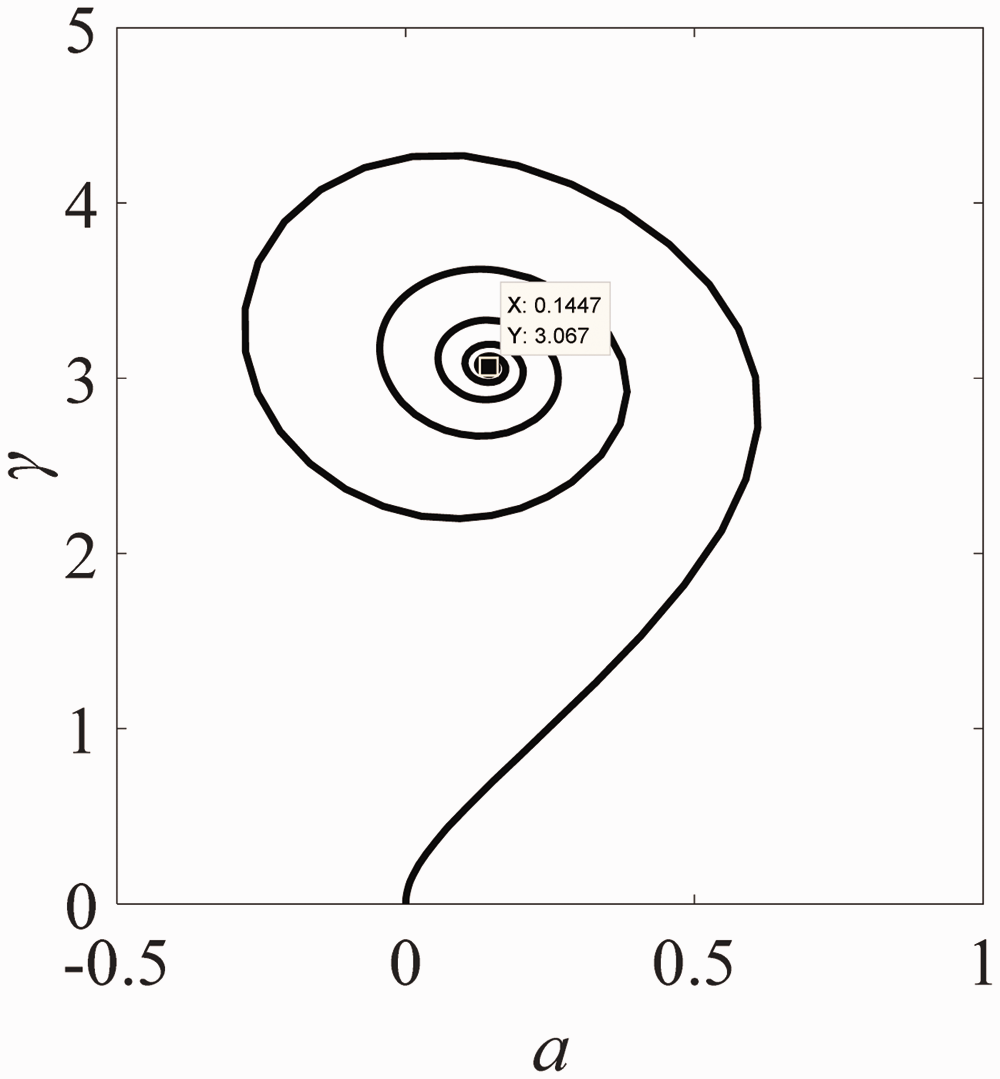
Next, the influences of excitation voltage, damping, and feedback gains on the nanobeam vibration response of the first mode for superharmonic resonance are discussed. Figure 13 gives the amplitude–frequency response curves of superharmonic resonance for different amplitudes of AC excitation voltage for the first mode. It shows that the peak amplitude ascends with the amplitude of AC excitation voltage V0 growing. When V0 = 2.0 V, there are three solutions. The peak amplitude point shifts to the right of Amplitude–frequency curves of superharmonic resonance for different amplitude of AC excitation voltage for mode 1 (k = 1).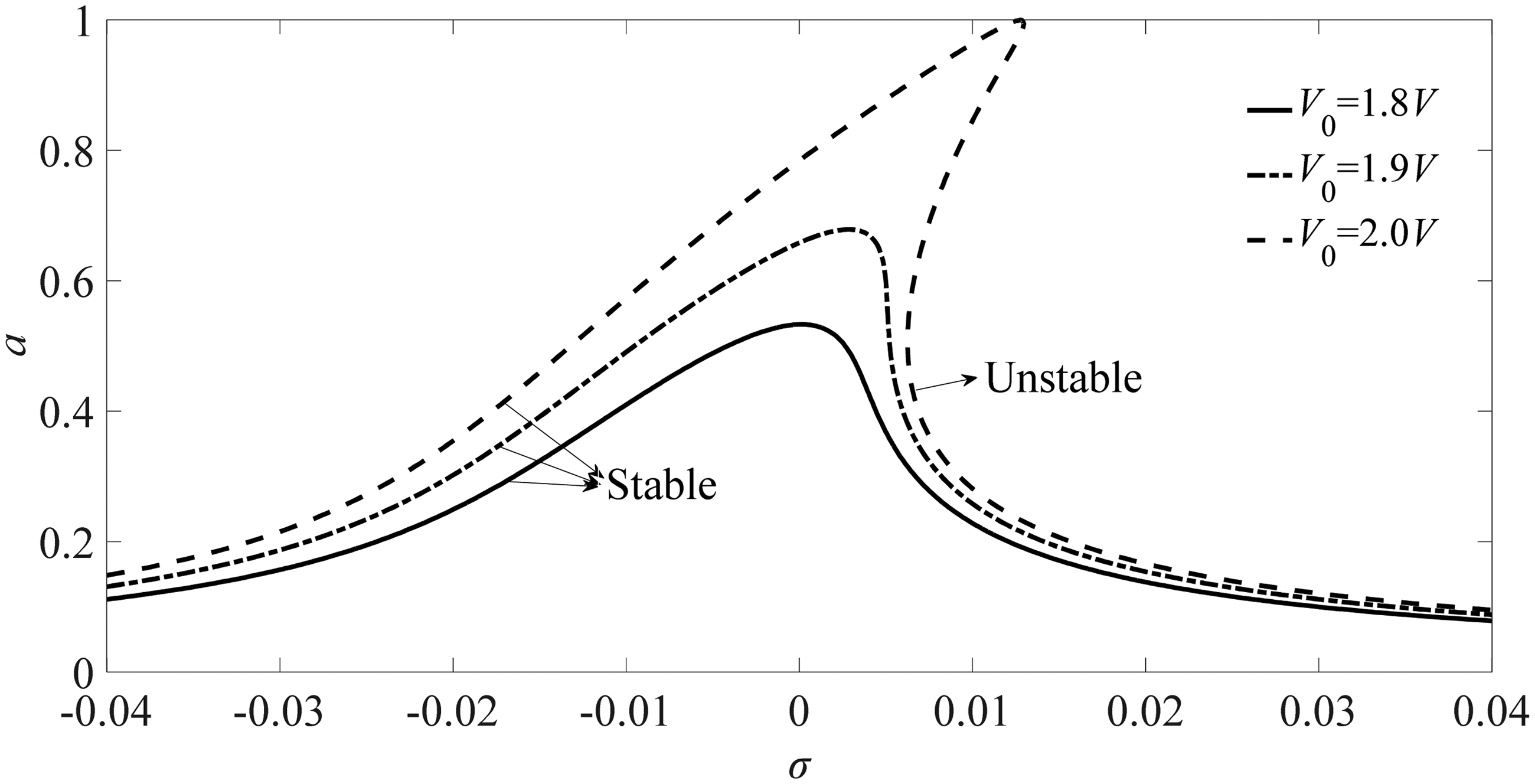
Figure 14 depicts the amplitude–frequency response curves of superharmonic resonance for different dimensionless damping of the first mode, with the fixed values of excitation voltage and feedback gains. The peak amplitude decreases with the increasing of dimensionless damping b. There is multisolution phenomenon as dimensionless damping is equal to 0.0175, and the peak amplitude shifts to the right of Amplitude–frequency curves of superharmonic resonance for different dimensionless damping for mode 1 (k = 1).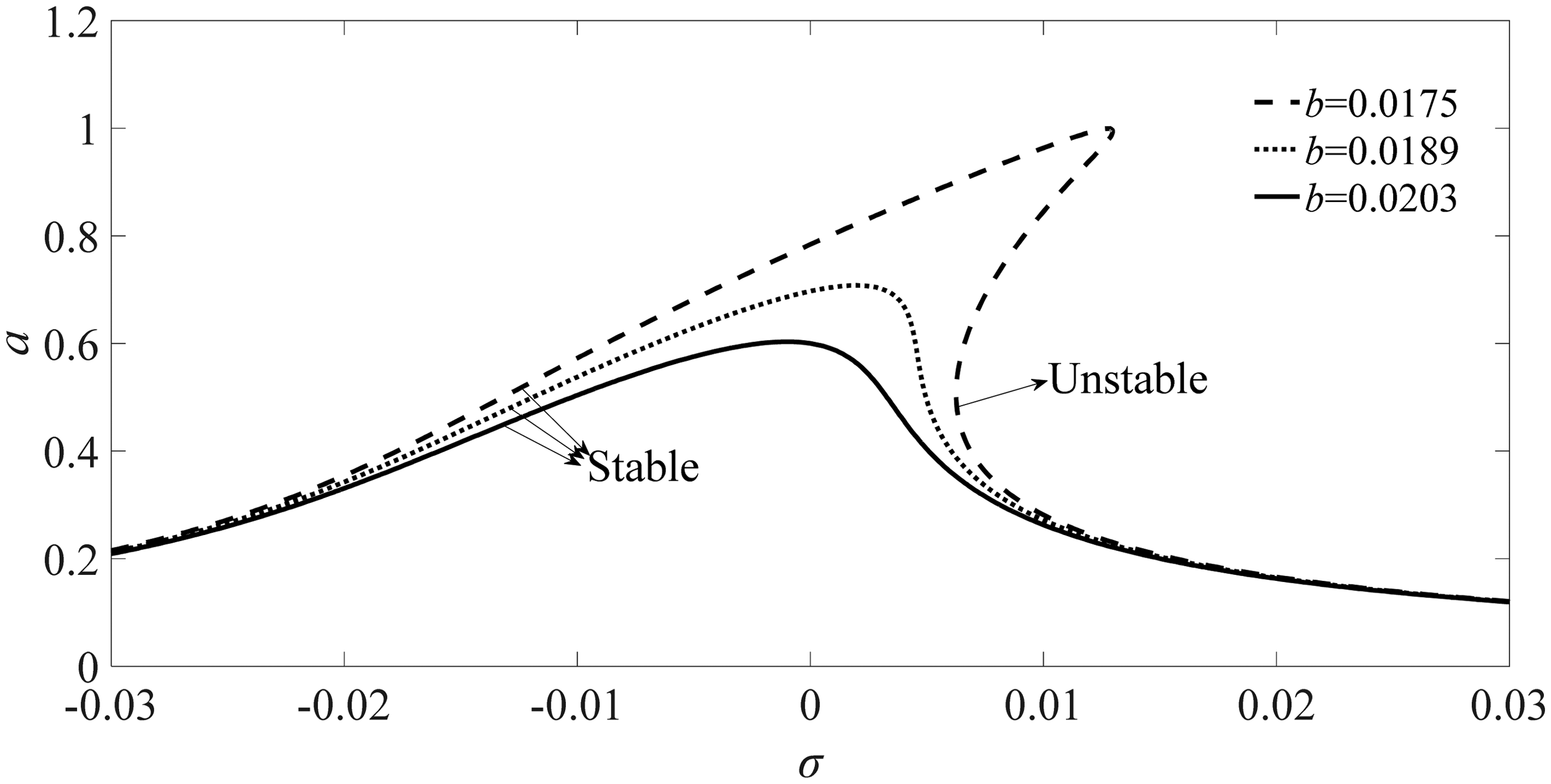
Amplitude–frequency response curves of superharmonic resonance for different feedback gains of the first mode are shown in Figure 15. It shows that the peak amplitude changes little with feedback gains K varying.
Amplitude–frequency curves of superharmonic resonance for different feedback gains for mode 1 (k = 1).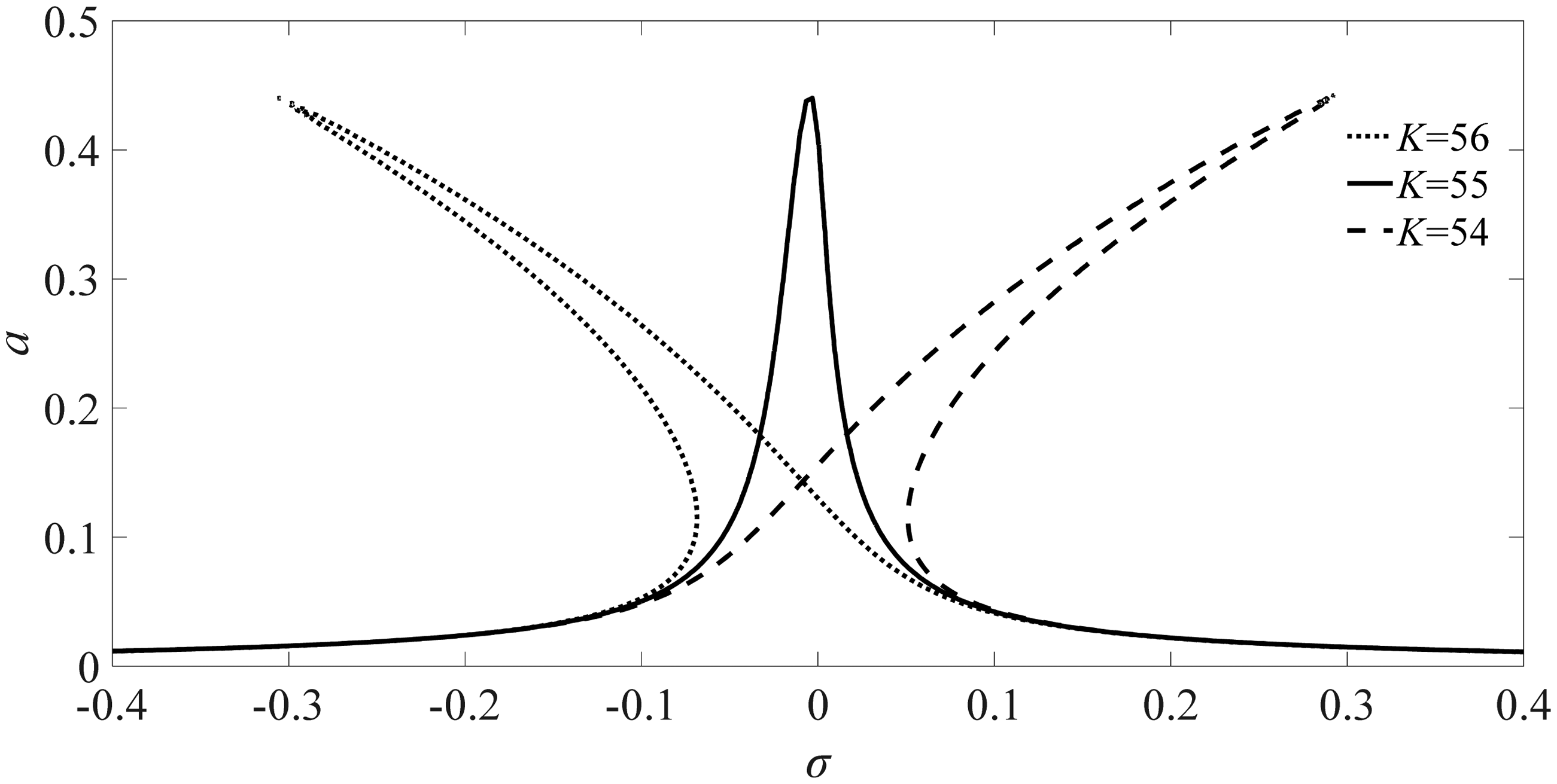
When the values of feedback gains are 54 and 56, the multisolution phenomena exist. The system is unstable. The point of peak amplitude is away from the point of
Curves of the peak amplitude of superharmonic resonance varying with the nanobeam length for different amplitude of AC excitation voltage and different damping are illustrated in Figures 16 and 17, respectively, for the first mode. The peak amplitude grows with the amplitude of AC excitation voltage V0 increasing and decreases as damping c rises, for the fixed values of nanobeam length. When the values of amplitude of AC excitation voltage and damping are fixed, the peak amplitude increases with nanobeam length growing. It shows that the peak amplitude can be suppressed by excitation voltage and damping, which proves the conclusion given in Figures 13 and 14.
Curves of the peak amplitude of superharmonic resonance varying with nanobeam length for different amplitude of AC excitation voltage for mode 1 (k = 1). Curves of the peak amplitude of superharmonic resonance varying with nanobeam length for different damping coefficient for mode 1 (k = 1).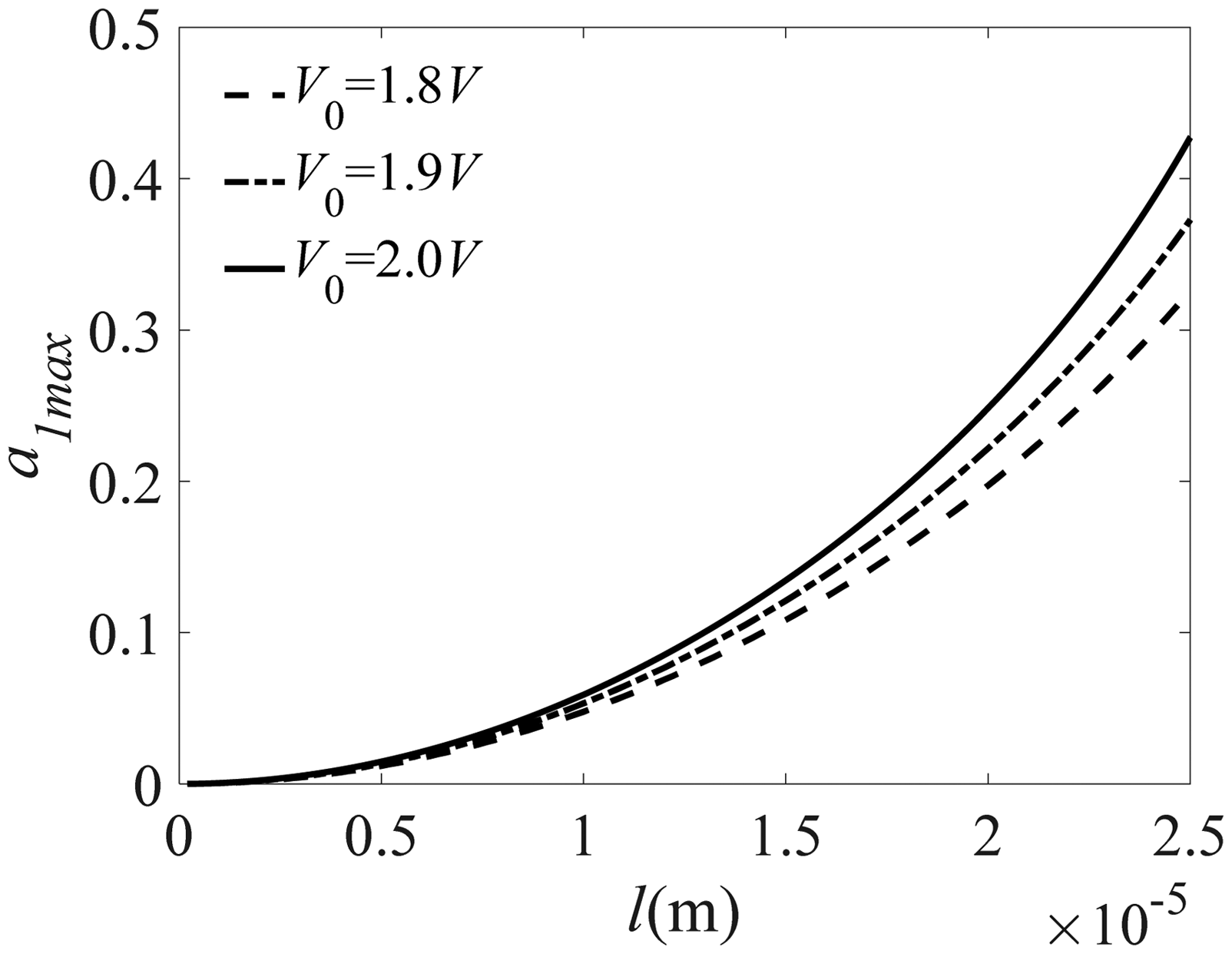
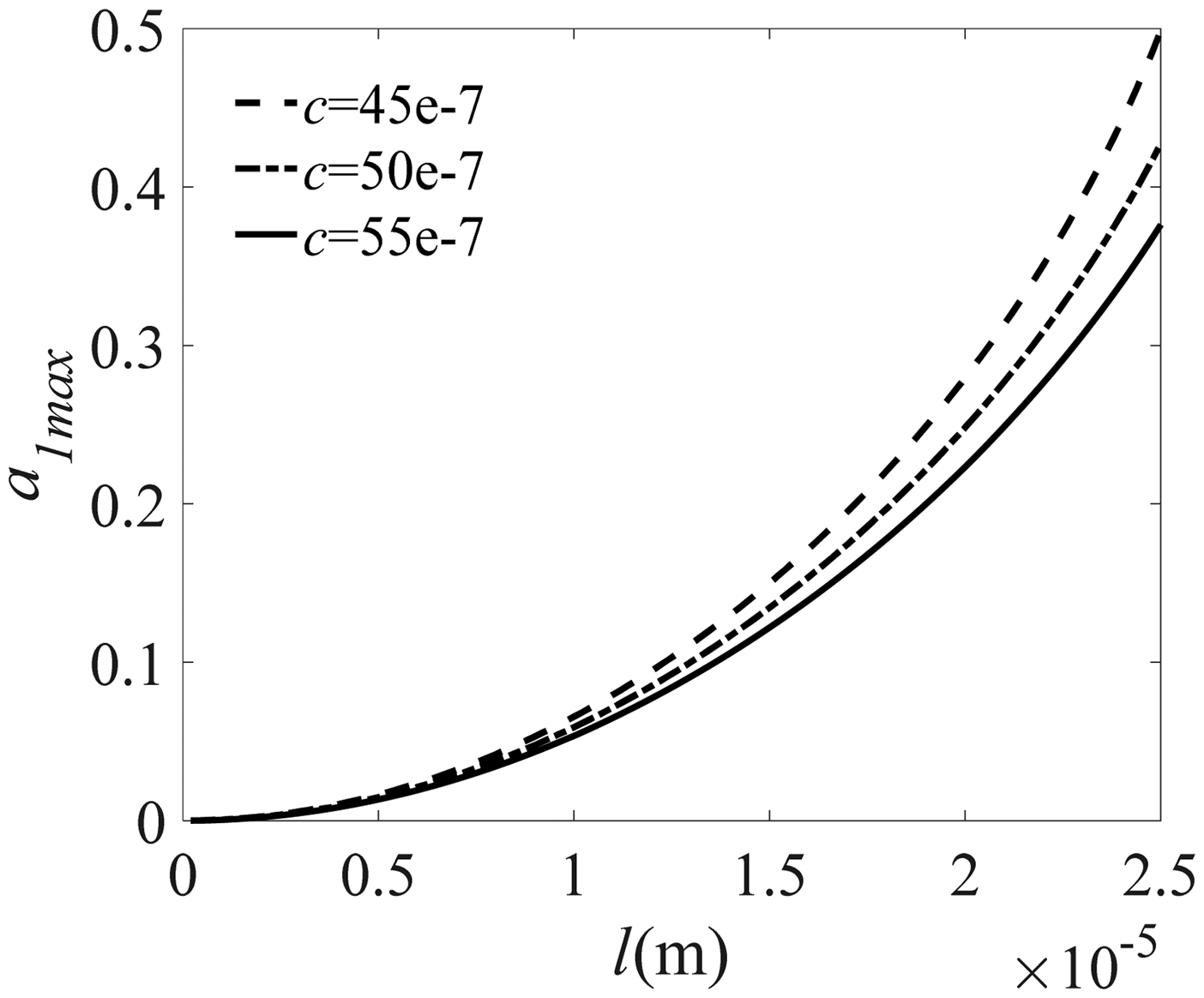
Figure 18 shows the curves of the nonlinear term of superharmonic resonance varying with nanobeam length for different feedback gains of the first mode. The value of nonlinear term vk2 ascends with feedback gains K increasing, when the value of nanobeam length is fixed. For a fixed value of feedback gains, the value of nonlinear term grows as nanobeam length increases. From the amplitude–frequency equation and this picture, it is obtained that the influence of feedback gains on the vibration response is operated by changing values of nonlinear term.
Nonlinear term of superharmonic resonance varying with nanobeam length for different feedback gains for mode 1 (k = 1).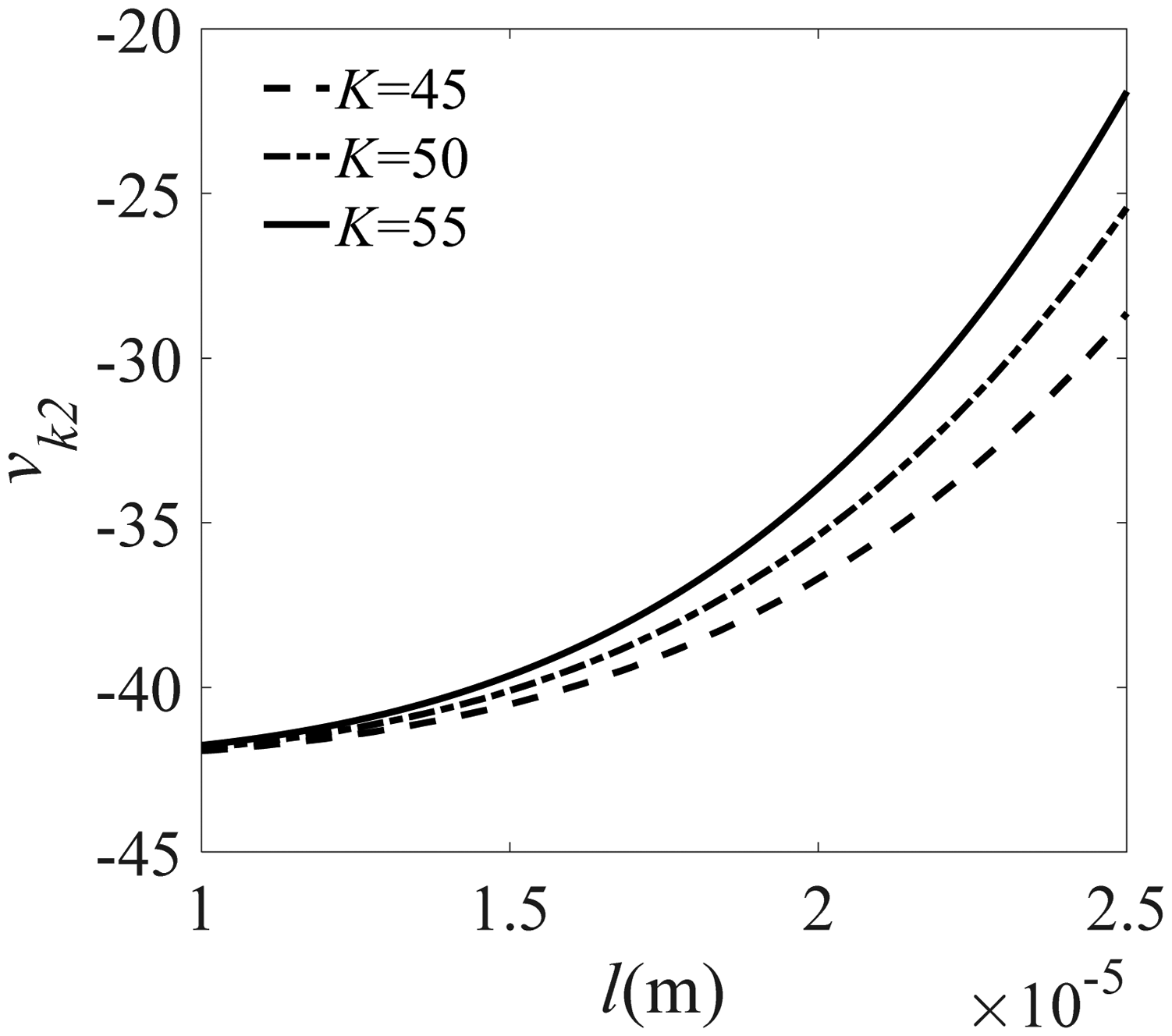
Figure 19 depicts the curves of the critical control voltage of superharmonic resonance varying with nanobeam length for different feedback gains for the first mode. The critical control voltage vc2, which insures the vibration response is linear, decreases with the increase of the nanobeam length for a fixed value of feedback gains. Critical control voltage also decreases if the value of feedback gains is enlarged.
Curves of the critical control voltage of superharmonic resonance varying with the nanobeam length for different feedback gains for mode 1 (k = 1).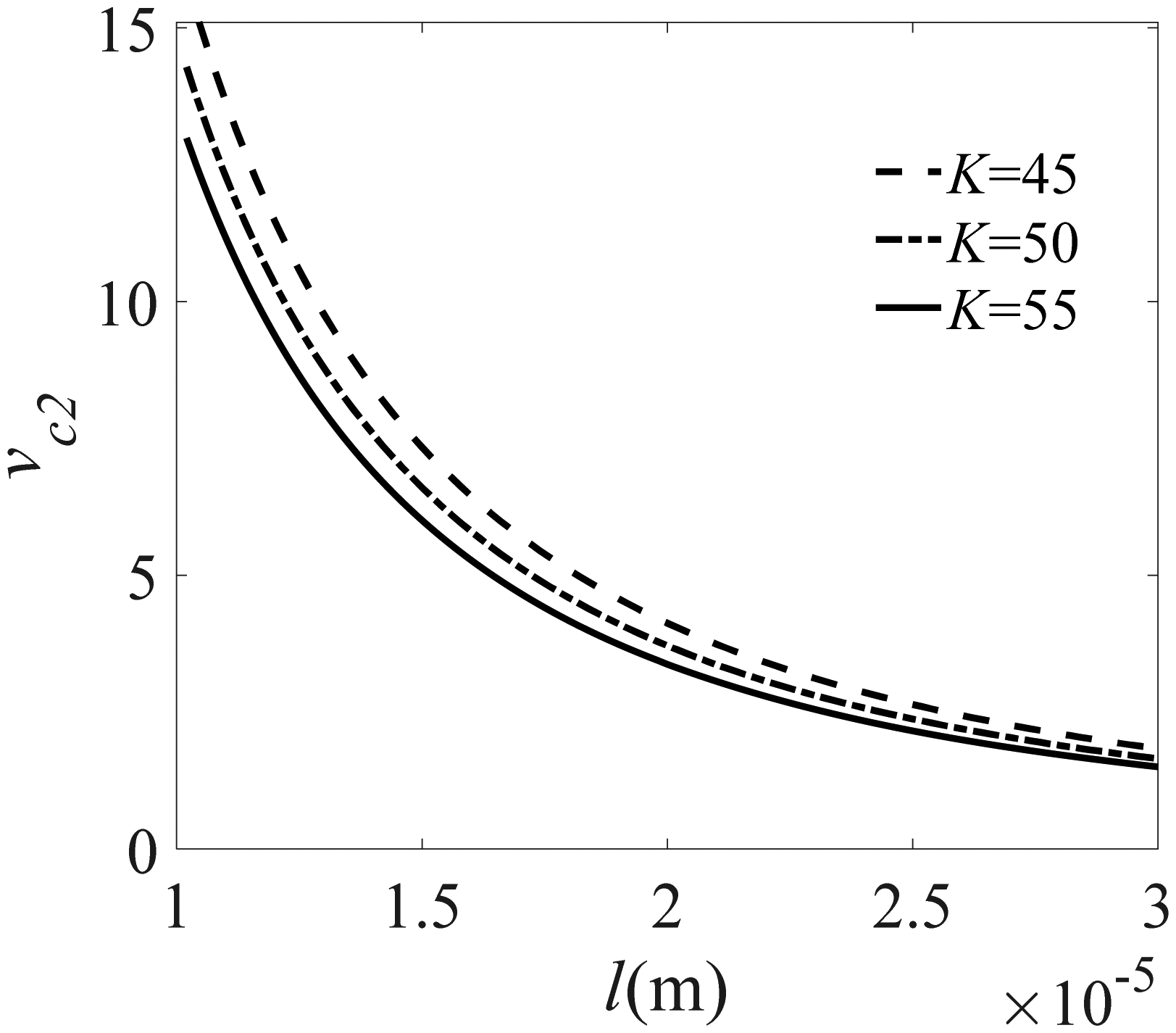
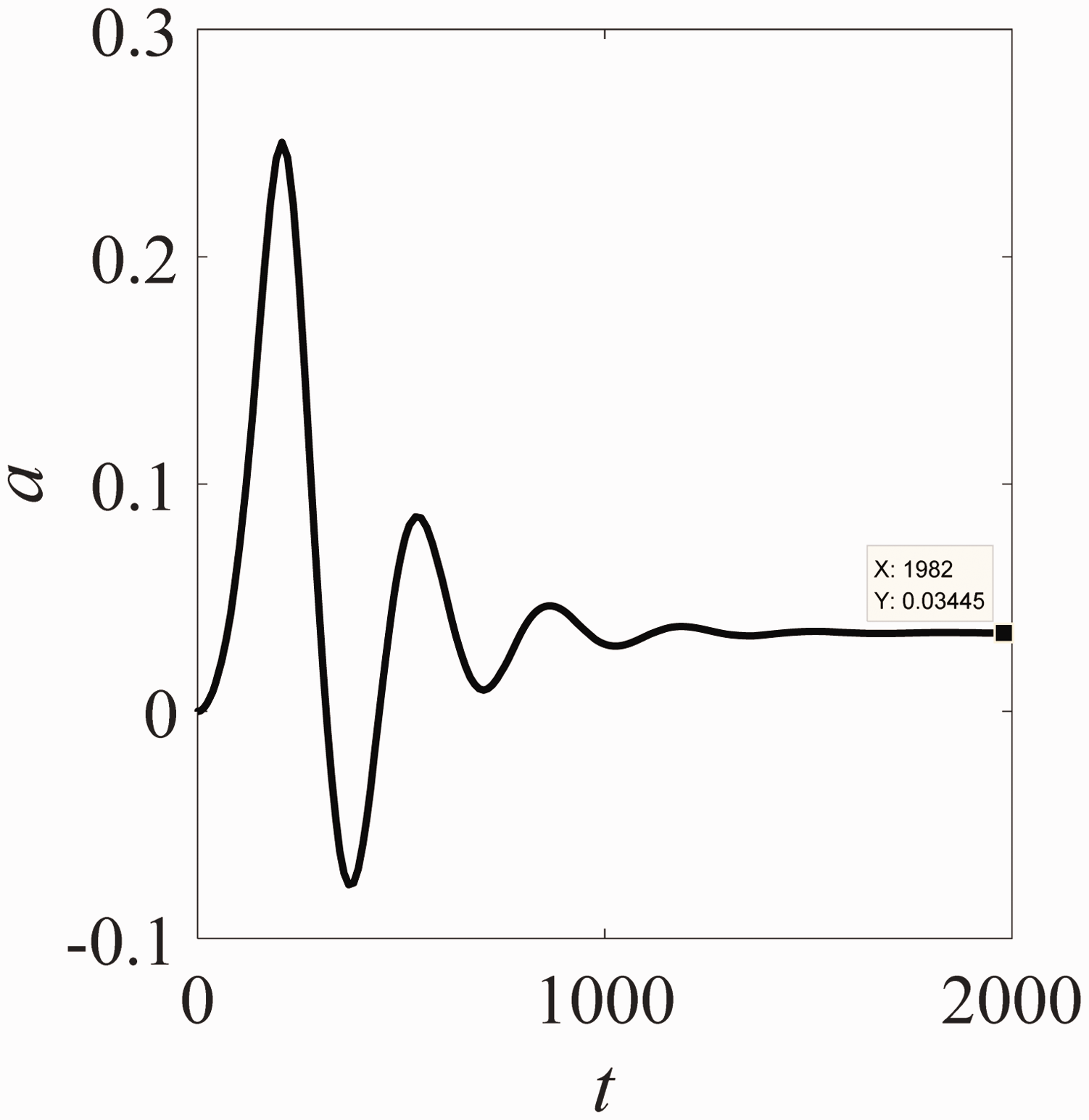
The stability of solutions with zero initial conditions of superharmonic resonance for the first mode is shown in Figures 20 and 21. They are obtained from equations (38) and (39) with the initial values of amplitude and phase set to zero, using the method of MATLAB ode45. From the figures of phase–amplitude and time–amplitude response, the system vibration with control finally tends to be stable and the solutions of steady state a1 = 0.034, γ1 = 3.06 can be obtained.
Phase–amplitude response of superharmonic resonance with zero initial conditions for mode 1 (k = 1). Time–amplitude response of superharmonic resonance with zero initial conditions for mode 1 (k = 1).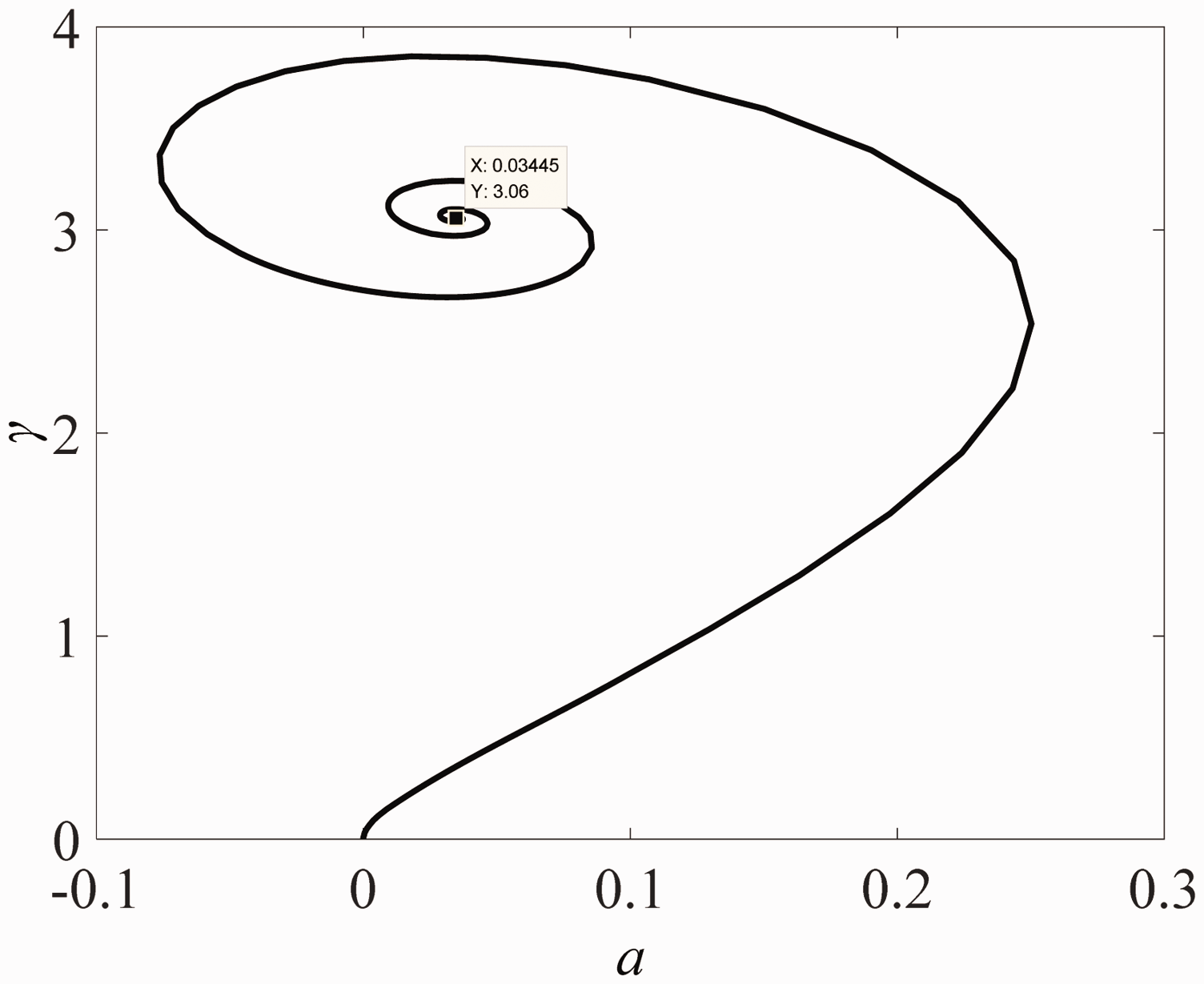
Conclusions
The nonlinear vibration control of electrostatically actuated nanobeam using nanocapacitive sensor is investigated analytically and numerically, considering primary resonance and superharmonic resonance. The relationships between amplitude and nanobeam length under different damping and excitation voltage are determined. The characteristics of amplitude–frequency response for different control parameters are studied in detail. It is found that excitation voltage, feedback gains, and damping are the main effect factors on nonlinear vibration control and amplitude suppression of nanobeam. The effects for different excitation voltage, feedback gains, and damping on the nonlinear vibration behavior and the peak amplitude of electrostatically actuated nanobeam are discussed. It is obtained that the nonlinear vibration of nanobeam can be effectively suppressed by selecting appropriate values of system parameters and control parameters. AC excitation voltage and damping can soften the nonlinear characteristics of nanobeam vibration. Feedback gains achieve the effective control for nonlinear vibration of nanobeam via changing the value of nonlinear term; however, the feedback gains have a limited influence on the peak amplitude. The peak amplitude increases with excitation voltage increasing, while decreasing with damping growing. The results presented in this article provide a possible reference for the design and industrial applications of NEMS devices based on nanobeam.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.