In this paper, the author proposes several approaches to nonlinear optimal-based control implementation. The vibrating system (structure) equipped with two tuned vibration absorbers (TVAs) is analysed against a system with one TVA. For control purposes, MR dampers are used instead of TVAs' passive viscous dampers. The main contribution of this research is the development and numerical verification of three nonlinear optimal-based vibration control concepts (the implementation of one-step optimal control, quasi-optimal control, and the optimal-based modified ground-hook law) that produce MR damper required current (not required force) as their output (thus force tracking algorithm that results in control inaccuracy is entirely omitted here), and that may be directly applicable for online and real-time control; moreover, all of the MR damper force constraints (no active forces; lower and upper limits; nonlinear, hysteresis-type dynamics) are embedded in the control technique, thus the solution is optimal for the assumed actuator respecting its limitations. The proposed approaches are investigated against the standard ground-hook law and passive TVA(s) with optimally tuned (i.e. having a frequency response maxima of equal and lowest values) parameters. The performance of all the solutions for the one- and two-TVA systems is compared, confirming the validity and efficiency of the three proposed concepts: almost 50% reduction of the Dynamic Amplification Factor is possible with regard to the respective optimally tuned passive 1 TVA and 2 TVA configurations. No offline calculation, excitations/disturbances assumption, or frequency determination is necessary.
Vibration may lead to both damage and fatigue wear, which may be the problem of the systems and structures with intrinsic elasticity. Slender, beam-type structures such as towers, masts, chimneys, wind turbines,1–7 bridges,8,9 high buildings10,11 as well as plate structures12,13 etc. usually have small modal damping ratios and can suffer excessive (and dangerous) resonant vibrations. For many systems, vibration is an undesirable behaviour. Thus many structures and systems are equipped with vibration attenuation solutions. The concepts utilised to reduce vibration include tuned vibration absorbers (TVAs), tuned liquid (column) dampers, viscoelastic/hydraulic dampers, granular dampers, piezoelectric actuators, etc.14,15 Passive, semiactive, and active TVAs are widely spread vibration reduction solutions for vibrating systems/slender structures (towers, high buildings, bridges, chimneys, etc.). In the standard (passive) approach, TVA consists of the additional moving mass, spring and viscous damper, which parameters are tuned to the selected (most often first) mode of the vibration.16 Passive TVAs work well at the load conditions characterised with a single frequency to which they are tuned but cannot adapt to a wide excitation spectrum. In real world conditions, the frequency response of many systems/structures may vary (more, if the damping is low), thus more advanced TVA solutions are regarded to tune the TVA operating frequency. Among them, magnetorheological (MR) TVAs are placed,5,6,11,17 as using an MR damper (instead of a viscous damper) guarantees a wide range of resistance force and fast response times, and high operational robustness along with minor energy requirements as compared with the active systems.1,18–24 As simulations and experiments show, the implementation of the MR damper in a TVA system may lead to further vibration reduction in relation with the passive TVA.5,6 The concept presented in this paper was originally developed for the vibration attenuation of slender structures, namely wind turbine tower-nacelle system, using its scaled model.25–28 The first bending mode of the structure is analysed only, and the MR TVA(s) is (are) tuned to its frequency.
Most of the MR damper (including MR TVA) online and real-time control algorithms are based on the bang-bang approach (e.g. the two-level sky hook or ground hook concepts),29 fuzzy logic30,31 or, most widely, two-stage concepts with the calculation of the MR damper required force using the original Den Hartog approach, adaptive (positive or negative) stiffness/damping/friction, LQR/LQG, etc., being the first stage, and the MR damper force tracking algorithms using the feed-forward loop with the MR damper forward or inverse model, and the feedback loop with damper force sensor signal and, e.g., PI control algorithm.18,20,32–36 The two-stage approaches suffer from an inability to produce the required (by the first stage algorithm) MR damper force pattern due to the impossibility to generate active forces, and force value limitations: lower constraint imposed by the residual force at zero current, and upper constraint imposed by the piston velocity and maximum current that can be fed through the MR damper coil. As a result, the force pattern, often carefully determined at the first stage, is not the same at the output of the second stage thus vibration control results are compromised. Another problem is that such advanced and sophisticated first-stage algorithms need oscillation frequency determination which may be an issue for polyperiodic (e.g. transient, coupled vibration phases) or random (e.g. seismic) excitations – for such situations, these algorithms switch to the passive operation mode.
In the present research, the author proposes an entirely different concept: all of the MR damper force constraints (the inability to generate active forces along with both lower and upper force value limitations as well as nonlinear, hysteresis-type MR damper dynamics) are an intrinsic part of the control method, adopting the nonlinear control techniques. Throughout them, one may distinguish the optimal, maximum principle-based methods4,13,37 with the receding horizon control/model predictive control,38 the control Lyapunov function-based methods8 including (adaptive) sliding mode control and backstepping,10,39–42 (feedback) linearisation methods with linear optimal control theory based on the Riccati equation solution,10 the approximating sequence of Riccati equations,43 etc. Each of the method groups has its advantages and disadvantages, e.g. the first method group is performance (or arbitrary quality criteria minimisation) oriented with the relatively high computational burden necessary for online and real-time implementation. The second group is stabilisation oriented and requires existence/knowing of the Lyapunov function, while the linearisation and approximation approaches often have their own problems with precise online or real-time mapping of nonlinear dynamics. Moreover, most of the proposed solutions are hardly applicable online, alternatively applicable for control-affine nonlinear systems or non-implicit control-state relations, whereas this is not always the case, as in the present problem.
In view of this, the analytical and numerical methods for nonlinear vibration that may be implemented online are widely searched for. The drawback of the classical Hamilton principle based methods is that for most of the real-life physical problems, it is impossible to prescribe terminal conditions. Hence, He44,45 proposed the modified Hamilton principle for initial value problems with acceptable accuracy considering the simple solution procedure. He gave strict derivation, first deduced in the history, valid for all initial-value problems, important in both pure and applied sciences due to the complete elimination of the long-existing shortcomings in Hamilton’s principle. The natural final conditions satisfy automatically the physical requirements, making a vital innovation of Hamilton’s principle.
The current research’s main contribution is another approach to this issue. The paper covers the development and numerical verification of nonlinear-system-specific (regarding systems/structures equipped with single or multiple MR TVAs), maximum principle-based control solutions (one-step optimal control, quasi-optimal control, and optimal-based control including the modified ground-hook law) that are directly applicable for online and real-time implementation. They produce MR damper required current (not required force) as their output, thus a force tracking algorithm that always results in control inaccuracy is entirely omitted here. Furthermore, all of the MR damper force constraints are embedded in the control technique, thus the solution is optimal (quasi optimal or optimal based) for the assumed actuator, respecting its limitations. These approaches are investigated against the standard ground-hook law and passive TVA(s) with optimally tuned (i.e. having a frequency response maxima of equal and lowest values) parameters. The efficiency of all the solutions for the one- and two-TVA systems is compared, confirming the validity and advantages of the proposed concepts.
The paper is organised as follows. In the second section, the nonlinear optimal control concept using the maximum principle is introduced. Then, the vibration control problem with MR TVAs is formulated and solved using the Hamiltonian maximisation. The following sections describe the baseline implementation technique along with some alternative approaches, among which the modified ground-hook law is derived. This is expanded by the simulations results and several conclusions.
Nonlinear optimal control – the maximum principle
Assume state equation of the regarded system
where is the state vector with the initial value , is piecewise-continuous control vector with constraints, , and the quality index to be minimised is
Functions and are assumed to be continuously differentiable with respect to the state and continuous with respect to time and control. Let us define Hamiltonian in the form
If is an optimal controlled process (optimal trajectory of state and optimal control, respectively), there exist an adjoint (co-state) variable satisfying the equation ( and are and derivatives with respect to the state )
with a terminal (transversality) condition
so that maximises the Hamiltonian over the set for almost all ,46 i.e.
thus
Problem formulation
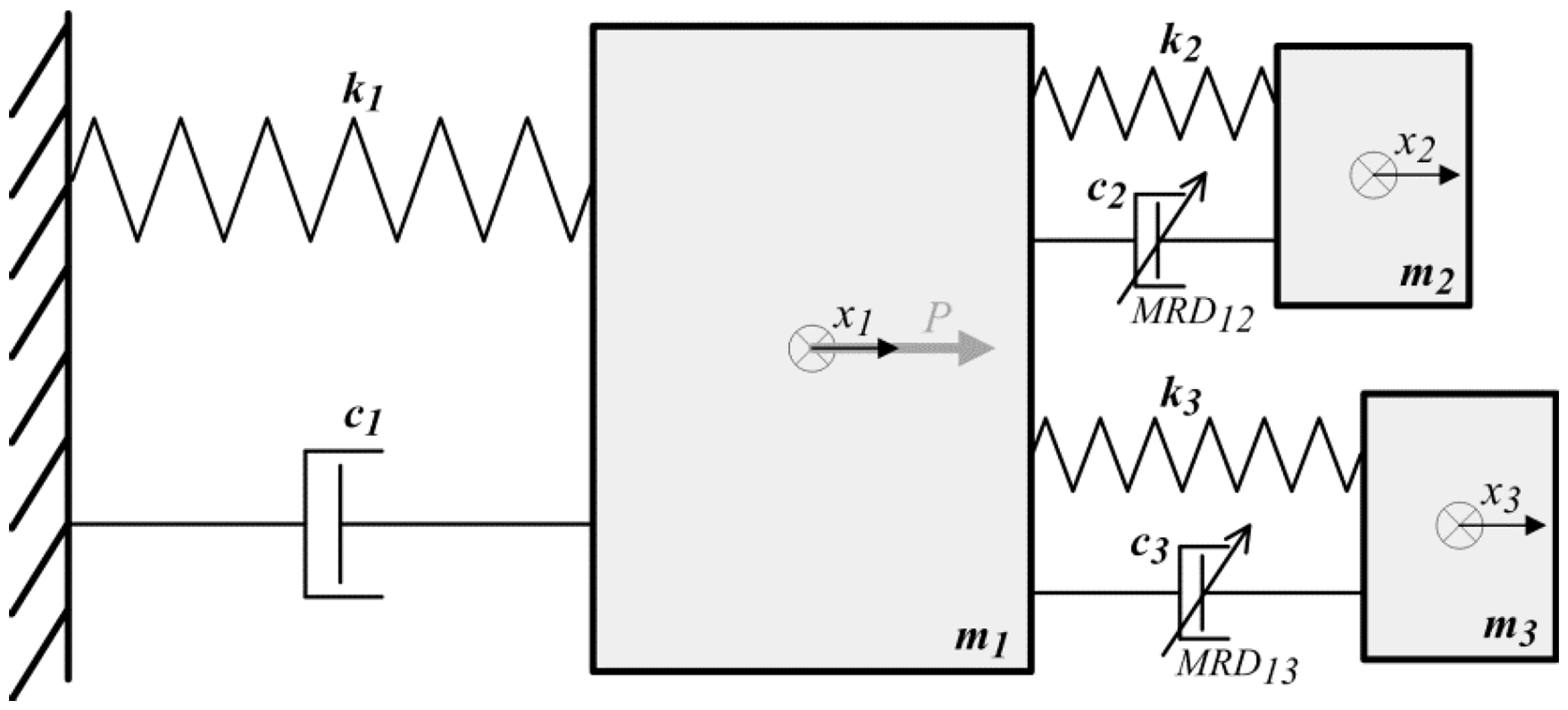
In general, we assume a primary vibrating system (structure) of (modal) mass m1, (modal) stiffness k1 and (modal) damping c1, and two TVAs of mass m2, m3, stiffness k2, k3, and damping c2, c3, respectively – see Figure 1. The movement of all m1, m2, and m3 is restricted to be linear displacement x1(t), x2(t), and x3(t), respectively, along the axis (horizontal in Figure 1) of the applied excitation force . The masses m2, m3 are assumed to be 6.37% of the mass m1 each, as the 5 ÷ 10% mass ratio range is regarded as optimal concerning the efficiency to the added mass ratio. The parameters k2, k3, c2, c3 are tuned to obtain three maxima of x1(t) amplitude output frequency response function of the lowest (for the assumed m2 and m3) and equal values. For control purposes, passive damping c2 and c3 is replaced by the MR dampers MRD12 and MRD13 of RD1097-1 series.21 Such configurations are further compared with the baseline primary system equipped with single TVA of mass
Diagram of the regarded system with two MR TVAs.
= m2 + m3 = 2m2, with stiffness and damping parameters tuned according to the standard Den Hartog approach.16 For control purposes, again passive damping is replaced by the (assumptive) MR damper of the doubled RD1097-1 force. The values of the adopted system parameters are presented in Table 1.
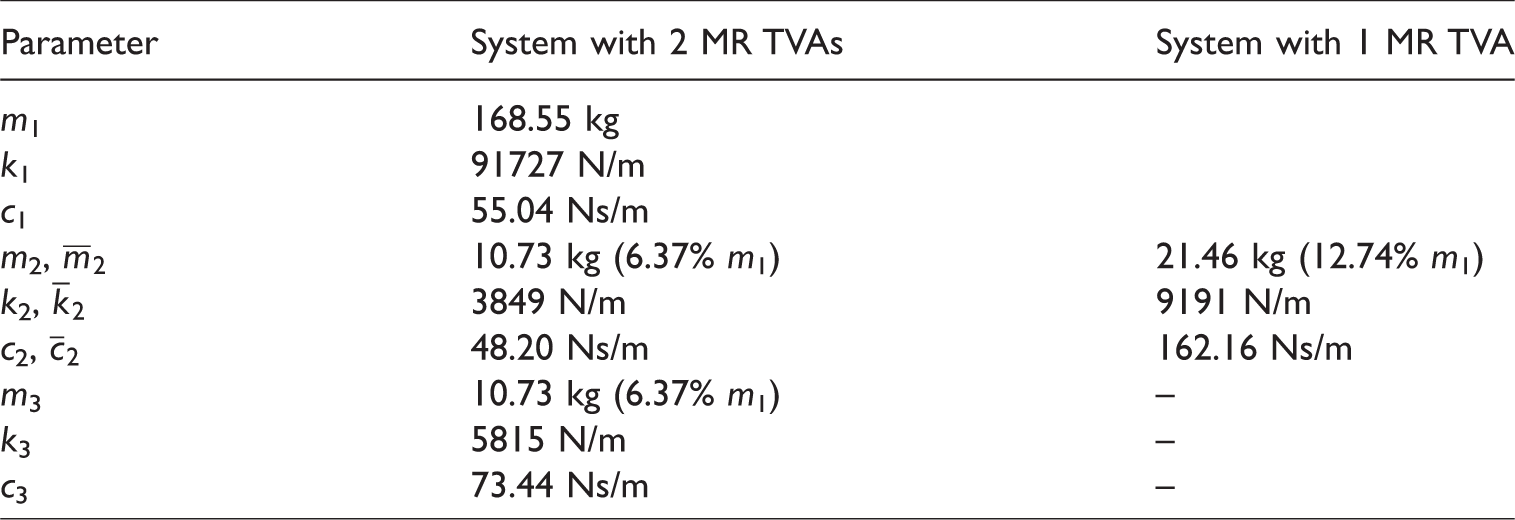
System parameters.
Parameter
System with 2 MR TVAs
System with 1 MR TVA
m1
168.55 kg
k1
91727 N/m
c1
55.04 Ns/m
m2,
10.73 kg (6.37% m1)
21.46 kg (12.74% m1)
k2,
3849 N/m
9191 N/m
c2,
48.20 Ns/m
162.16 Ns/m
m3
10.73 kg (6.37% m1)
–
k3
5815 N/m
–
c3
73.44 Ns/m
–
Let us assume the state (7) and the control (8) vector in the form
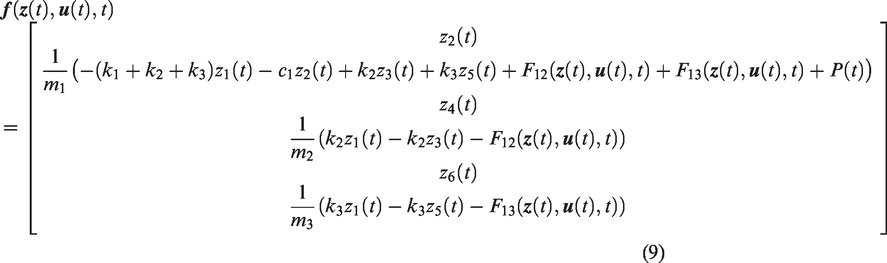
where , , , , , . The right-hand side of (1) is
where
and
are the MR damper resistance forces according to the hyperbolic tangent model, which parameters , , , , , are taken from Maślanka et al.47 (p=1, so it is further omitted), while and are MRD12 () and MRD13 coil currents, respectively, and is the excitation force applied to the primary structure (equations (10) and (11) concern 2 MR TVA system, while (10’) – 1 MR TVA system – further applied accordingly). To account for control constraints namely the MR damper current limitation to range, it was further assumed
The quality index function is assumed to be of the form
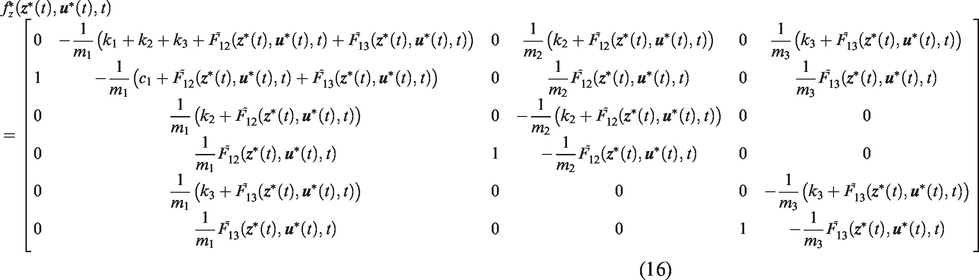
The adjoint equation takes the form (4), where
with
and
For a system with 1 MR TVA, all the above equations are modified and downsized accordingly.
We assume range: regarding the period of both and . Equation (21) results in
or
Let us analyse three disjoint and complementary cases
Case 1: If the right-hand side of (23) is negative, then we have the Hamiltonian maximum (+/– sign change of (21)) at ; thus and , i.e. according to (12)
Case 2: If the right-hand side of equation (23) is within the range of [0 1), then we have the Hamiltonian maximum at such that
i.e.
Case 3: If the right-hand side of equation (23) is within the range of [1 ∞), then we have the Hamiltonian maximum at , thus
The obtained solution is consistent with.48 The same analysis applied for equation (22) concerning , gives analogical results for and (equation (13)).
Baseline implementation technique
The common approach to the optimal control of nonlinear systems is computation of the optimal control using the maximum principle by solving the two-point boundary value problem (1)÷(5) offline; however, the so calculated open-loop control suffers from a lack of robustness to operating uncertainties, perturbations of external forces or initial conditions, and to unmodeled dynamics that are always present for highly nonlinear systems. Oates and Smith13 present the examples of complete degradation in control authority when initial conditions or external disturbances are badly assumed or omitted. To improve robustness to various types of uncertainties, the perturbation control technique, among others, is used.13,37,49 In this method, the generated control signal is based on a simplification (e.g. linearisation) of the system, and adjusted online to attenuate perturbations. However, for highly nonlinear systems with implicit relations between state, co-state and control, proper simplification (linearisation) may be an issue.
To cope with the control authority degradation due to the external disturbances, unmodelled dynamics or conditions change, the approach proposed here (further indicated with one-step optimal or, for simplicity, Optimal control) is to solve the boundary value problem (1)÷(5) at every sample step with the state and co-state dynamics online implementation. Due to the high computational load required online, an optimisation horizon is assumed: , equal to one integration step, aiming for piecewise (one-step) optimality. The MATLAB/Simulink 2016b environment is used. A dedicated level-2 s-function is called at every sample step, using actual external conditions signal(s) value(s), actual state values as initial conditions for equation (1), and terminal condition (5) for co-state. Utilising the bvp4c MATLAB function at every sample step, the boundary value problem is solved, the initial values for the co-state are calculated, and all co-state integrators are reset to these values. bvp4c is a finite difference iterative approach that implements the three-stage Lobatto IIIa formula.50,51 Alternative iterative approaches are the Adomian decomposition method (ADM), the variational iteration method (VIM),52 the homotopy analysis method (HAM),53 the homotopy method coupling with the perturbation technique – the homotopy perturbation method (HPM),54 etc., throughout which VIM and HPM are the methods of choice as they can effectively and accurately solve a large class of nonlinear problems including those with strong nonlinearity. They produce rapidly convergent successive approximations, do not require linearisation, do not impose the limitations or assumptions required in classical perturbation methods, while they can overcome the difficulties arising in handling Adomian polynomials or HAM free parameter determination.55–61
The test conditions parameters are as follows. The primary system (structure) is excited by a harmonic force of amplitude N and angular frequency rd/s (i.e. Hz). Fixed sample step s is adopted ( s within the rd/s i.e. Hz range for the two-TVA system). An automatic solver is selected, resulting in the ode3 procedure (ode8 is selected within the rd/s range for the two-TVA system). The weighting factors for the Hamiltonian are assumed so as to minimise the primary system (structure) displacement amplitude: , (, for single TVA), . MR damper continuous control current limitation A is assumed with respect to Lord Rheonetic.21
Alternative techniques
The main problem of online implementation of the maximum principle for the uncertain systems is the fulfilment of the transversality condition (5), requiring high computational load boundary value problem integration. This section addresses that problem and proposes alternative, optimal-based approaches.
Alternative concepts
It may be observed that for most oscillatory systems, the co-state variable changes sign every particular period of time (e.g. half of the oscillation period i.e. ) as the co-state is periodic for problems with periodic state conditions. If the co-state is a scalar, one may simply assume the final time at the current Nth step optimal problem task to be a moment of the co-state being equal to zero (), and immediately start new, the N + 1th step optimal problem task with . If the co-state is a vector, the final time at the current Nth step optimal problem task may be assumed as a moment of the co-state dominant element ( in the current problem) being equal to zero (), and investigated the error of this approach. Analogically, the N + 1th step optimal problem task start time will be set: by resetting to zero all the co-state integrators at ( – reset time). If the calculated terminal condition (5) error is negligible, this may save the large computational load. This approach is further indicated with the Q-O Ksi1 (Quasi-Optimal, sign change based resetting approach). Along with the Q-O Ksi1 solution, a similar approach based on the resetting of all the co-state integrators to zero every sign change, with the terminal condition (5) error calculation, was tested. This approach is further indicated with the Q-O Z1 (Quasi-Optimal, sign change based resetting approach).
Another concept to avert a large computational load boundary value problem integration is the utilisation of the very short time range basis optimal problem task instead of the exemplary half oscillation period or one integration step time range basis ( and s were assumed) using the high frequency resetting function and zero initial conditions for all the co-state integrators to enhance the influence of the ‘' term in (3) and so diminish the value and thus the influence of the equality (5) error. Again, if the calculated error is negligible, this may save a large computational load at the expense of a higher sampling rate. Piecewise quasi-optimality is assumed to be fulfilled. This approach is further indicated with the Q-O HF (Quasi-Optimal, High Frequency resetting approach).
Calculus of the errors
The calculus of the errors of the alternative, quasi-optimal approaches is based on the elementary proof of the maximum principle for the problem with the free right end point.47 Some basic steps of this proof are cited here.
Let be a continuity point of the optimal control , and the needle-like variation of is defined as
where is fixed. We denote by the solution of (1) which corresponds to the control . For we have . For sufficiently small , the vector valued function is defined on . The states and are arbitrary close to each other as control functions and are arbitrary close in . Thus is a small perturbation of in
If the control is continuous at the point , then
There exists a limit
For sufficiently small, the vector valued functions are defined also on and converge uniformly to . For any there exists a limit
Thus, on the function is the solution of
with the initial condition (25), thus
and so
Here, in the elementary proof of the maximum principle, it is assumed: according to equation (5); however, in our implementation we have either: and , or: , thus we proceed for according to equation (25)
where is an arbitrary continuity point of the control , while is an arbitrary element of the set . Thus, for equation (6) holds for all the continuity points of the control .
To investigate the regarded approach error resulting from taking the assumption either: and , or: , instead of (5), the product in equation (33) is estimated for different values of , calculating with the use of equation (27). The initial condition based on the formula (25) is assumed: , which is assessed to be of the order of magnitude equal or higher than (being the right-hand side of equation (25)), regarding the values of the terms present in the right-hand side of equation (9) for the assumed system parameters (see Table 1), , ranges, and the MR damper resistance forces (10)(10’)(11) ranges limited by (12), (13) constraints, that are in turn limited by the requirement ( is of the order of as in equation (24)).
Based on equation (33), for , we obtain
where the error is
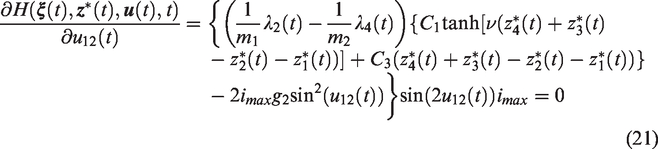
For the Q-O Ksi1 and Q-O Z1 approaches, the values of from the range of with s ( s for the Q-O HF concept) step were adopted and: , ( s for the Q-O HF concept), assuming (or , respectively) sign change every half of the oscillation period. Using equation (35), for each assumed value of , a quotient (regarded approach error) was assessed according to the above concept. As a result, non-negligible (over in wide time ranges) values were obtained for both the Q-O Ksi1 and Q-O Z1 approach. Thus these two solutions are further ignored. The Q-O HF approach copes better with the problem of error – the values of a quotient for most of the time samples are assessed to be negligible, thus control results may be considered credible in wide time ranges. The exemplary patterns for the 2.7 Hz (point A in the primary system/structure displacement amplitude output frequency responses, Figure 4) and 3.9 Hz (point C in Figure 4) excitation frequencies are presented in Figures 2 ( s) and 3 ( s). For higher values, no significant change in the assessed patterns is observed. For simplicity, the results of the Q-O HF approach are further indicated as the Quasi-Optimal control.
Assessed ε(τ) patterns for τ = 0 s at: 2.7 Hz (a), 3.9 Hz (b).
Modified ground-hook law
On the basis of the Hamiltonian principle-based MR damper current determination equations (21) to (23), the modified ground hook control is derived. It was originally introduced5,6 aiming at primary system/structure amplitude minimisation as a design criteria. Let us concentrate on formula (23). The sign of: is always the same as the sign of: , as always holds and all parameters , , , , , present in the MR damper forward model (10)46 are positive. Let us now regard the sign of . As is the dominant term of the first-row in matrix equation (4) right-hand side, and are the dominant terms of the second-row in equation (4) right-hand side, while is assumed to be at least the 15th order of the magnitude greater than (considering the design criteria) with ( states for the amplitude), the formula
gives sufficiently precise approximation of and amplitudes relation, with the phase delayed with regard to the phase by: , assuming an oscillation pattern characterised by single dominant angular frequency . Further, by analysing the third-row (implicating ) and the fourth-row (implicating ) equation of (4) in relation to , as well as the values of , , , for the assumed and ranges, it is concluded that inequality: holds with negligible phase shift: , and
From the above considerations on the system (4) first-row and second-row right-hand sides
thus
The simulations prove that formula (39) gives an adequately precise approximation of the sign, assuming that equation (5) holds or is negligible for most of the time samples – more details on this in Remark further on this section. As both and are positive, the equation (23) discussion (Case 1, 2, 3) implicates that is nonzero if and only if the signs of and are equal, while is zero in the opposite case. This leads to the formula
giving a semi-continuous optimal-based control current pattern (being the modified continuous displacement ground-hook law). The boundary value problem solving is necessary for the value calculation, only if: holds. However, the (one-step) Optimal control baseline approach implementation for adequately high value (primary system/structure displacement amplitude minimisation priority) generates a two level control pattern with two values: when: holds, and 0 in the opposite case (see Figure 6, note that: ). Thus the formula
gives a two-level optimal based control current pattern, being the modified two-level displacement ground-hook law stated by the author earlier 5,6 (note that the opposite sign concept was adopted for the MR damper force modelling this time). In practice, the modified two-level displacement ground-hook law (41) (indicated further as Mod.GND) is the simple implementation of the optimal control for the case when the primary system/structure displacement amplitude minimisation is the sole objective (see Figures 5 and 6 vs. Figure 8). This approach is further collated with the standard displacement ground-hook law (indicated as the Ground-Hook)63
The same analysis with similar results may be applied to formula (22), giving the optimal-based control current pattern , being the modified two-level displacement ground-hook law for the damper MRD13.
Remark:
The boundary value problem solving thus appropriate co-state initial values setting leads to the fulfilment of the terminal condition (5) as for the Optimal control baseline approach. This in turn leads to and values alteration with respect to the quasi-optimal approaches with zero co-state initial values assumption. However, it may be noted that: holds for both the baseline Optimal control, and Quasi-Optimal (Q-O HF) control approach for all time samples, but their countable number, excluding the samples when – using the Q-O HF concept – the co-state integrators are reset to zero thus: (this is also consistent with the negligible error values assessed for most of the time samples – see Figures 2 and 3), in contrary to, e.g., the Q-O Ksi1 approach, resulting in: patterns significantly perturbed in relation to patterns (and to Optimal control respective sign patterns) by the detrimental co-state resetting conditions (leading concurrently to high error values in wide time ranges, as stated in the Calculus of the errors section).
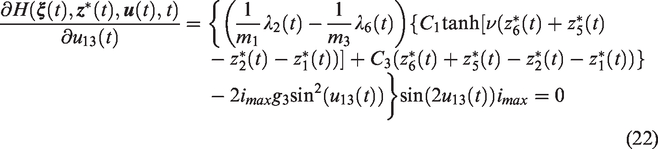
Assessed patterns for s at: 2.7 Hz (a), 3.9 Hz (b).
Vibration control results
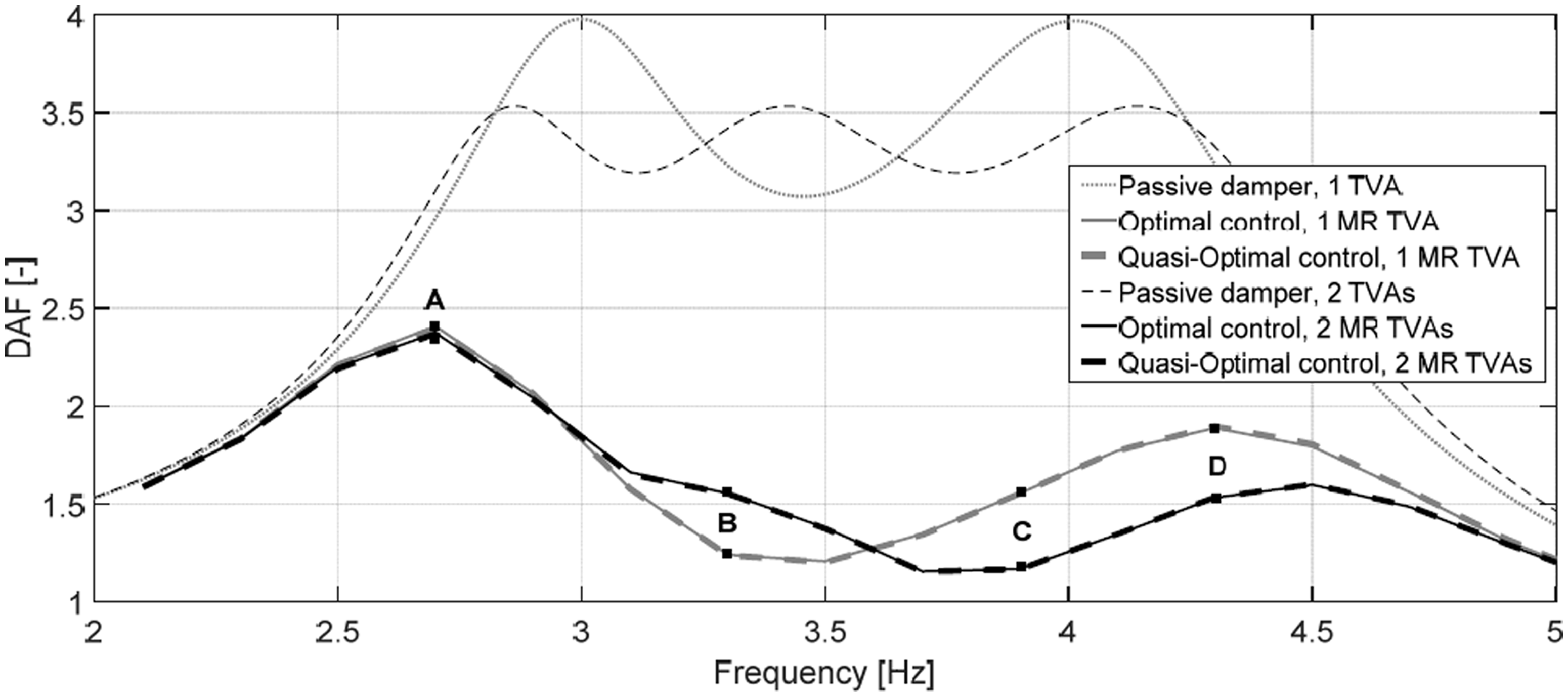
The efficiency of the proposed solutions is analysed based on Dynamic Amplification Factor (DAF) frequency characteristics along with , , , , , and time patterns (arguments of the variables are hereinafter omitted for clarity of presentation). Figure 4 presents the DAF frequency characteristics for the system with one or two MR TVAs and the implementation of the Optimal control, Quasi-Optimal control, and optimally tuned passive TVA(s) (for details see Section 3), according to equation (43)
Dynamic Amplification Factor (DAF) frequency characteristics: Passive damper vs. Optimal control vs. Quasi-Optimal control.
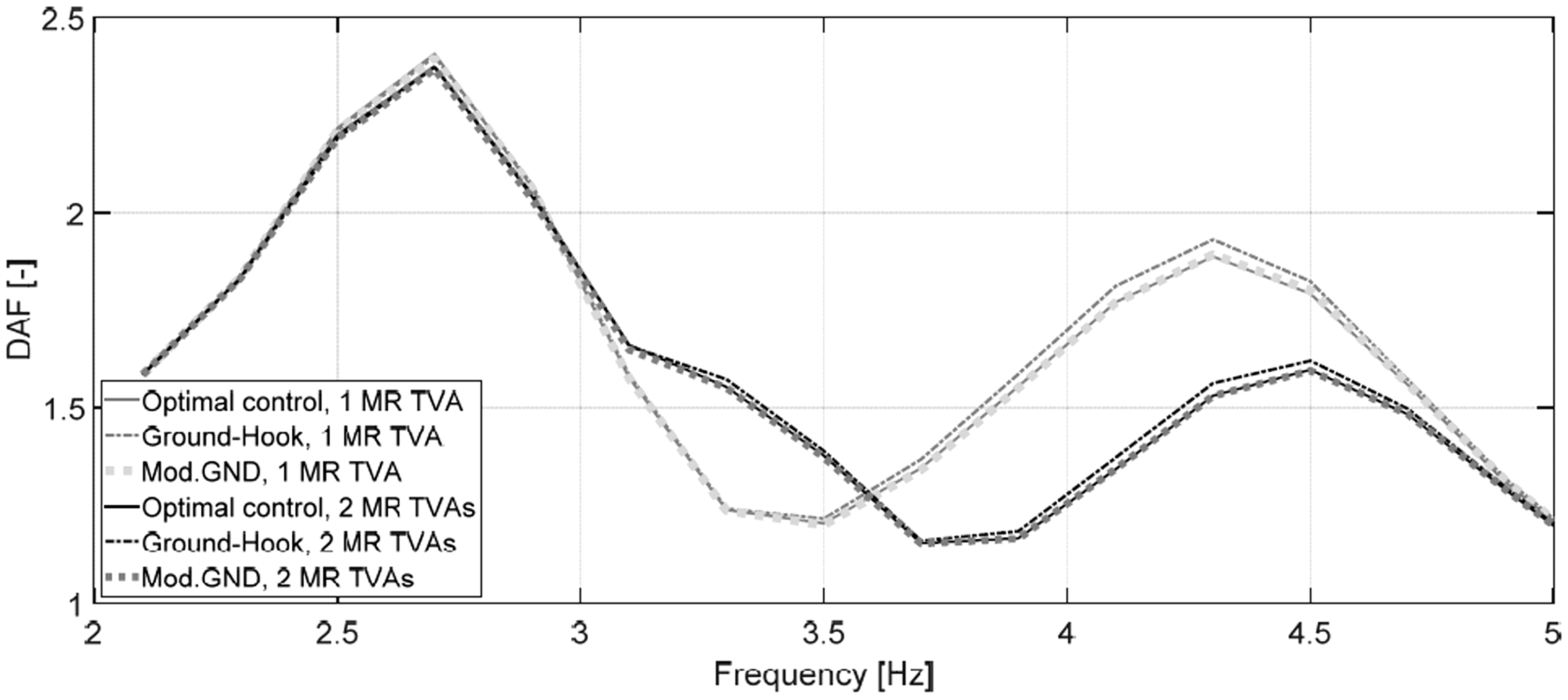
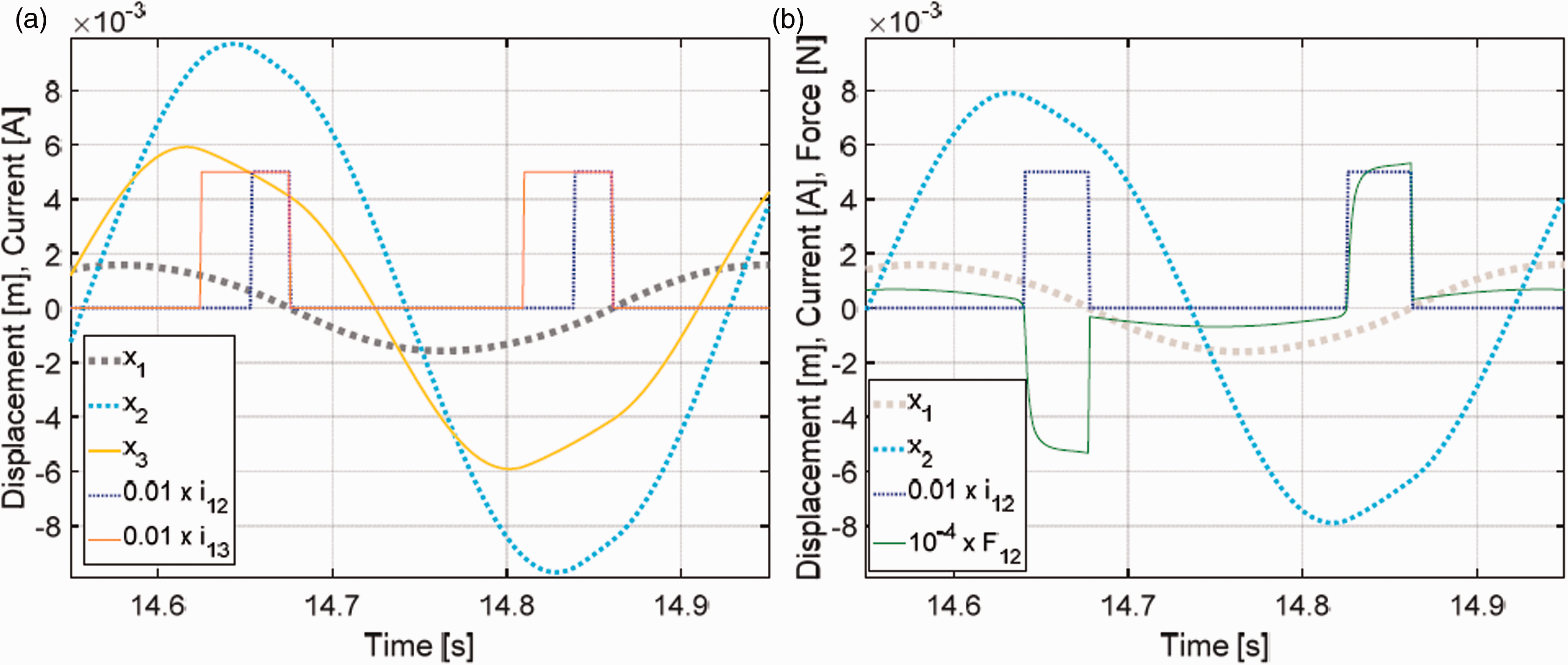
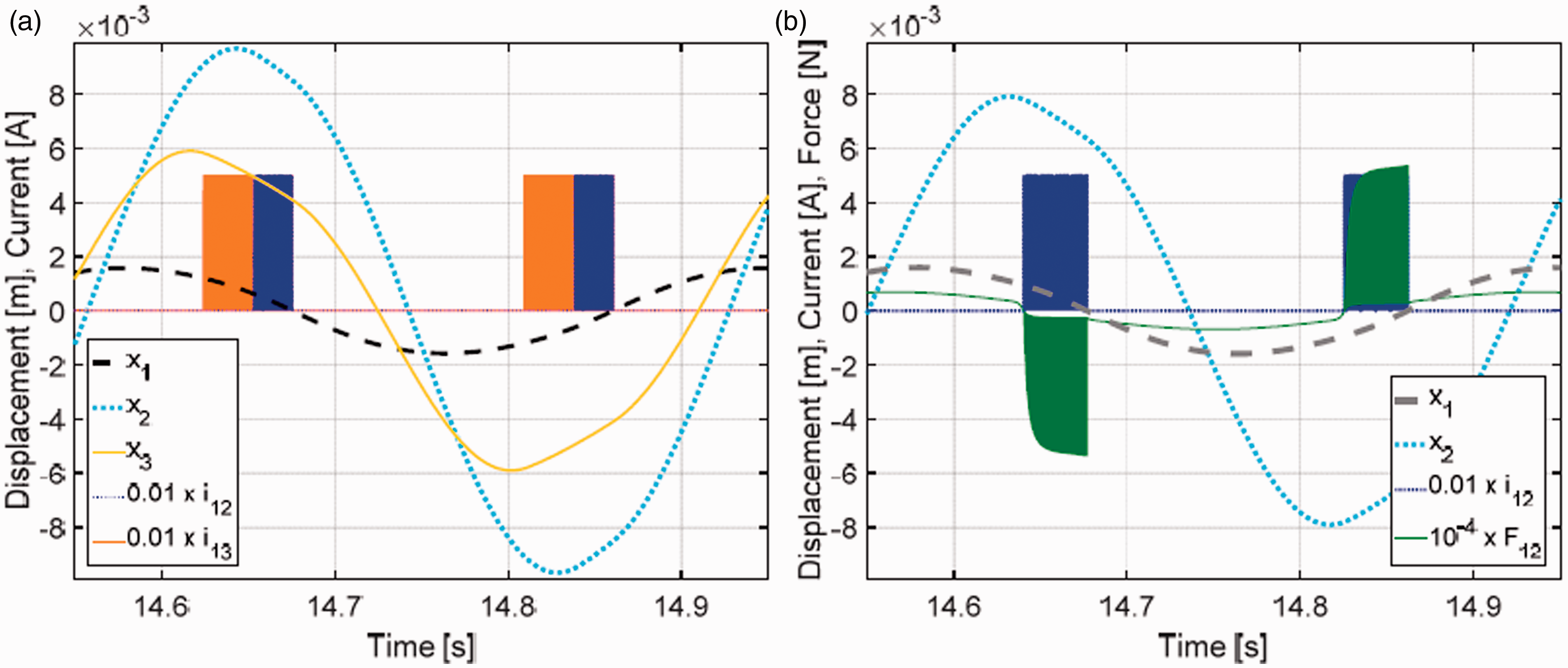
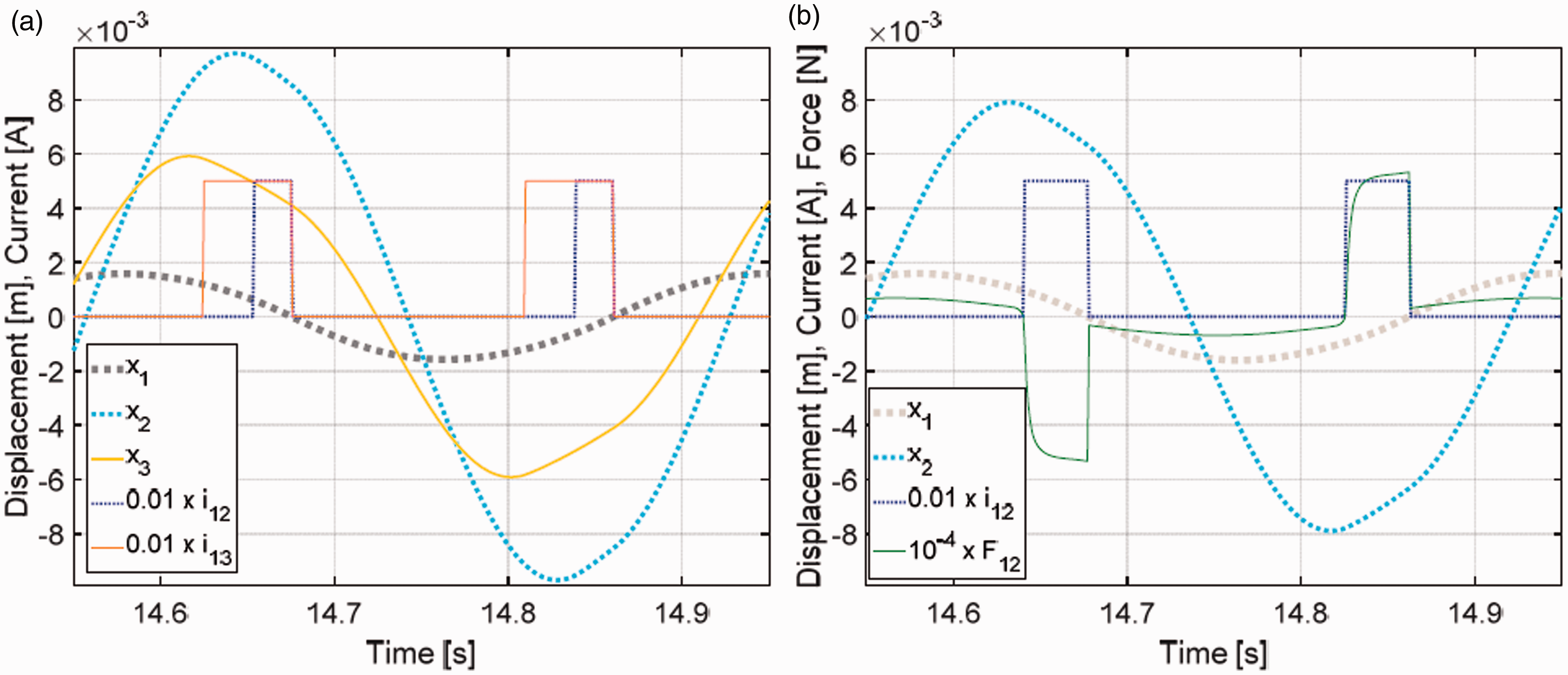
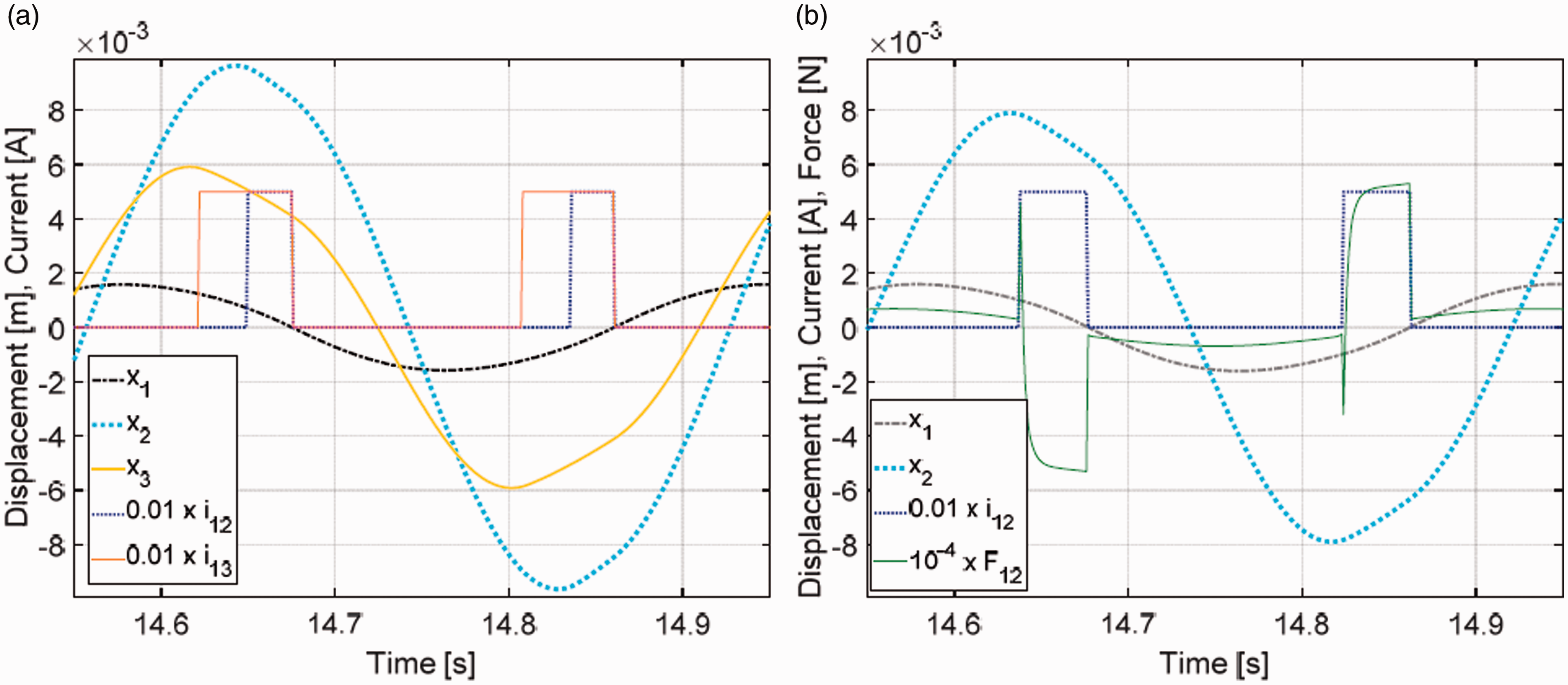
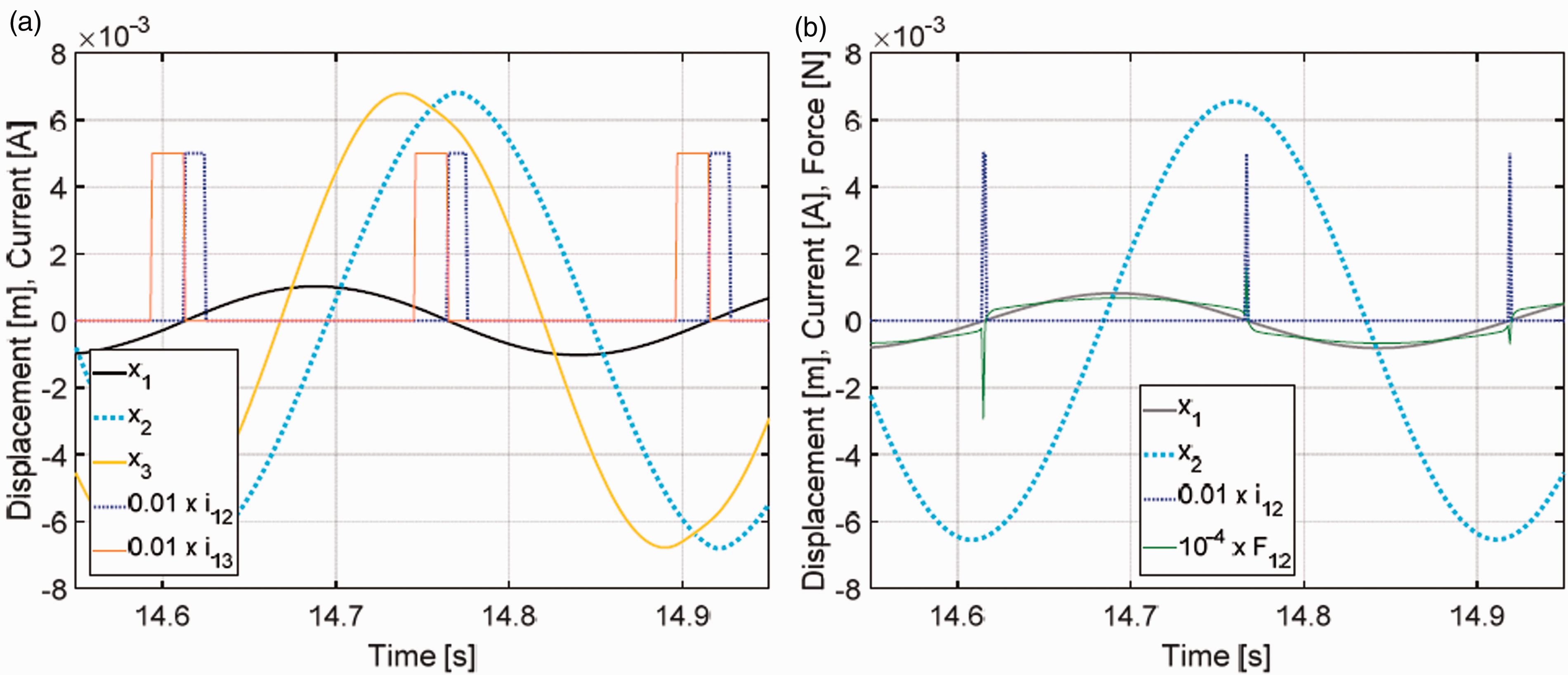
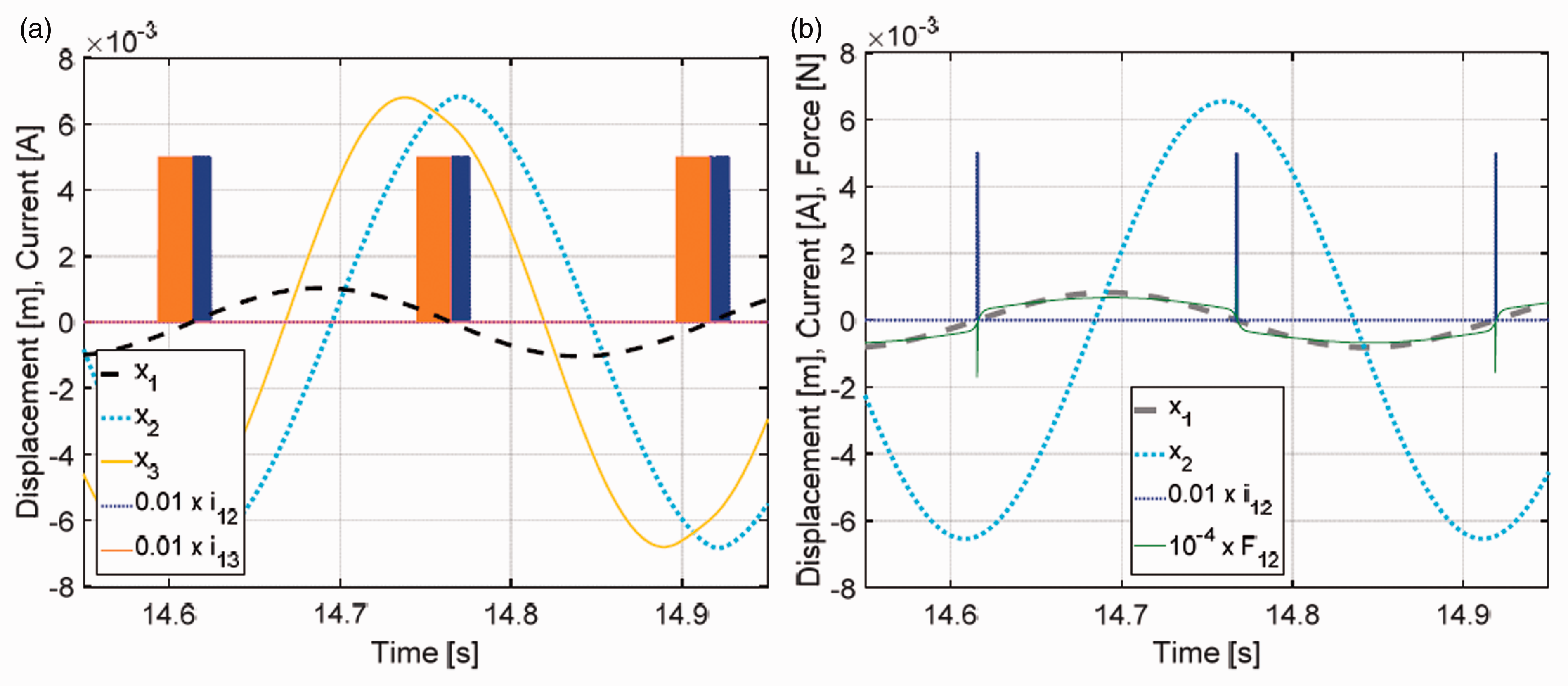
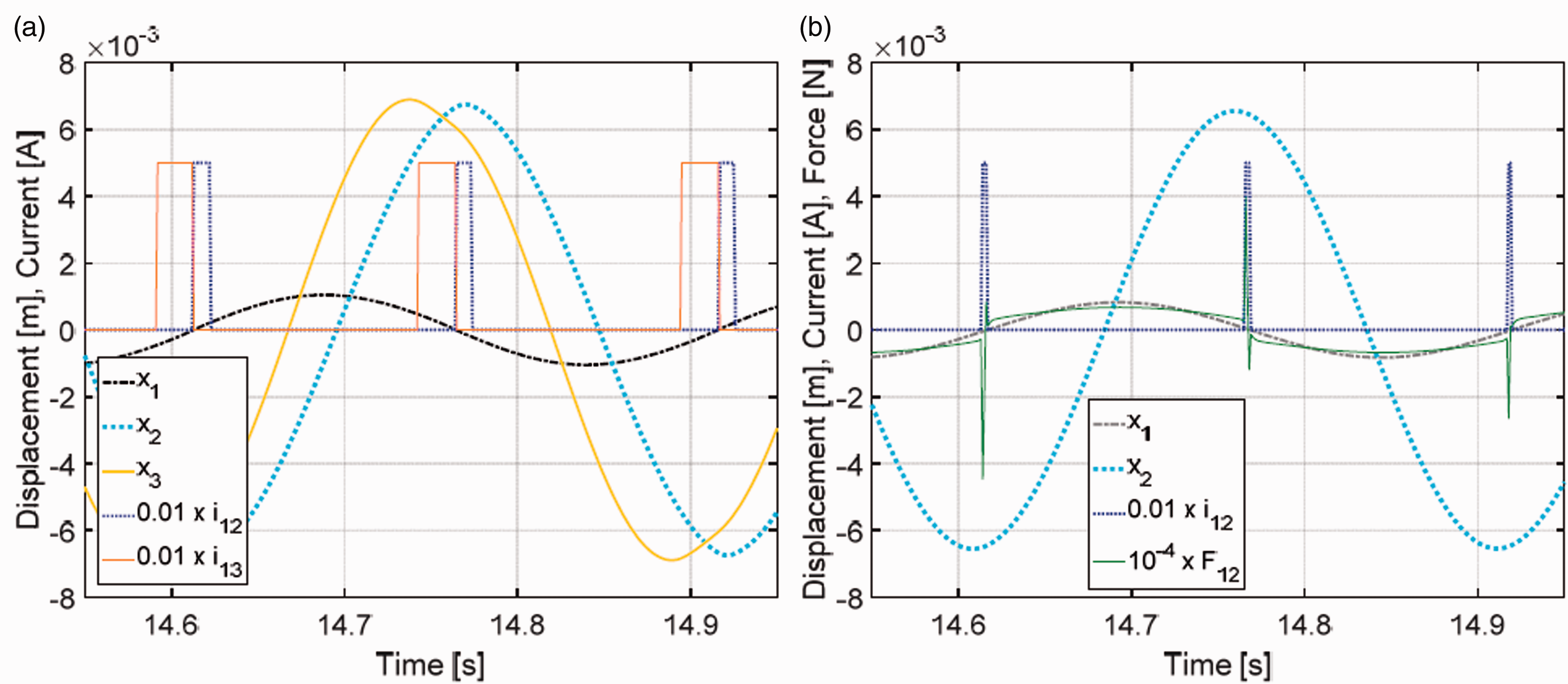
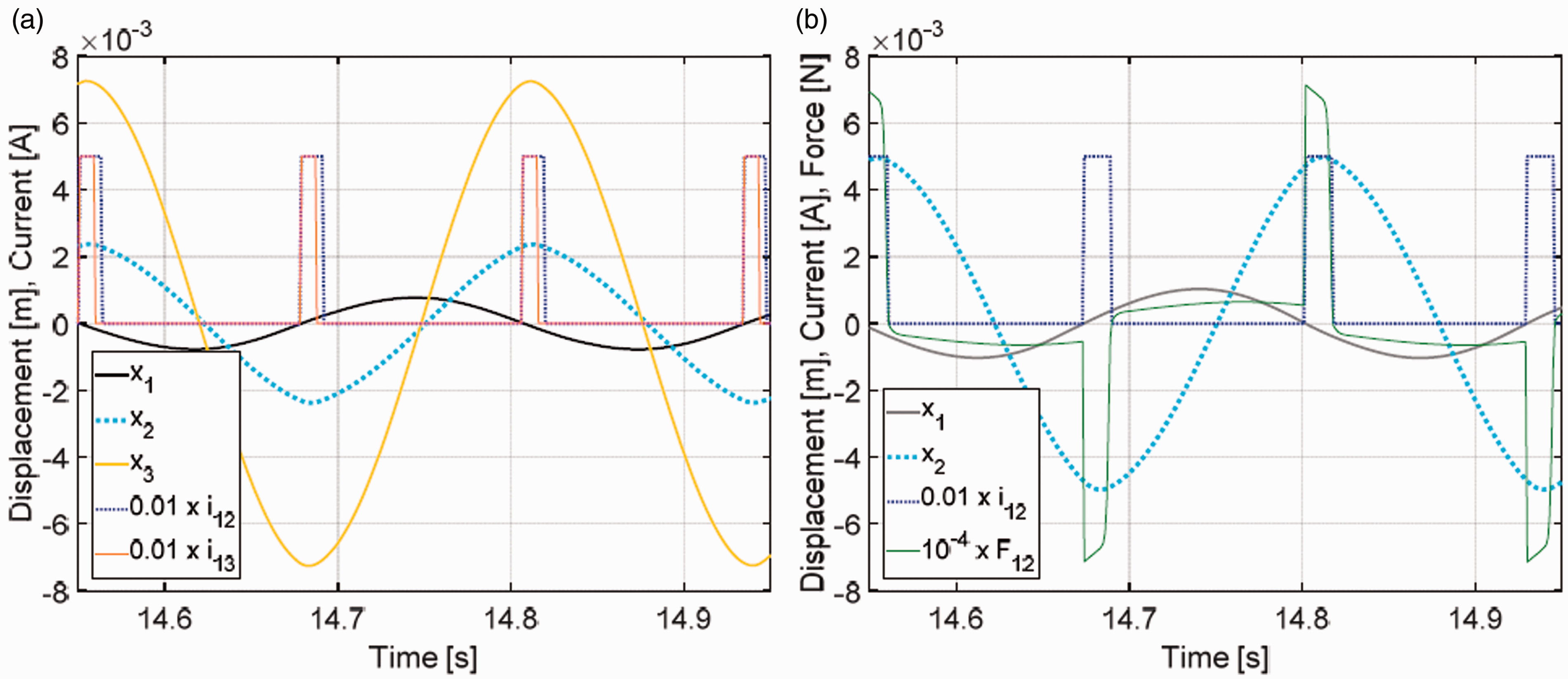
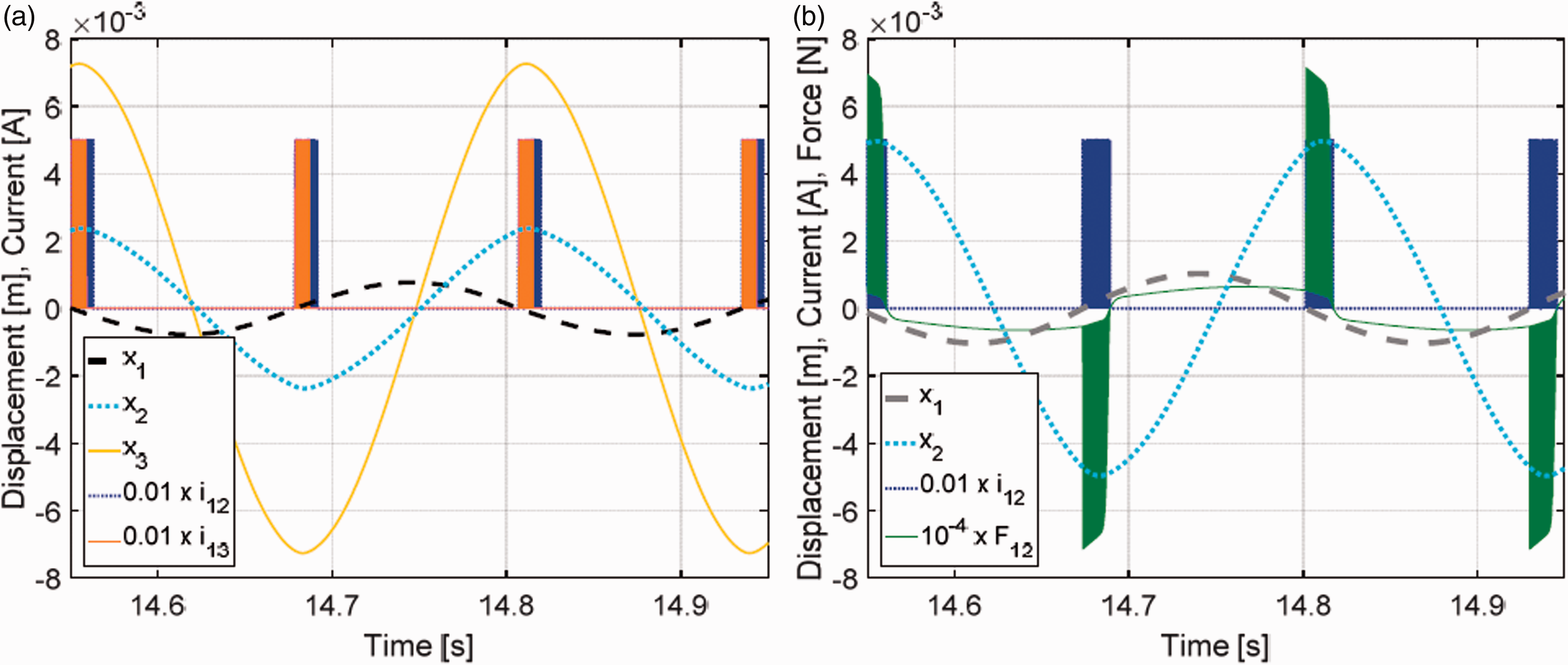
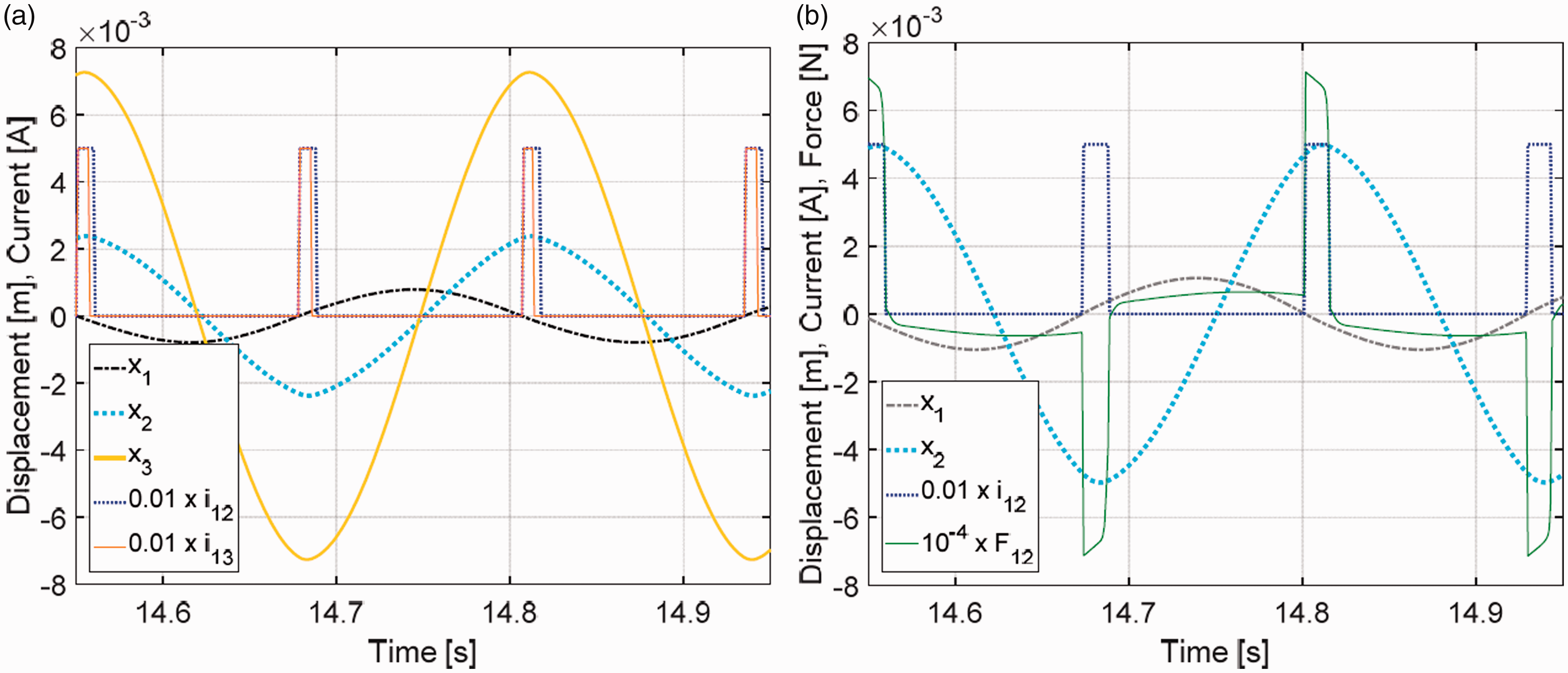
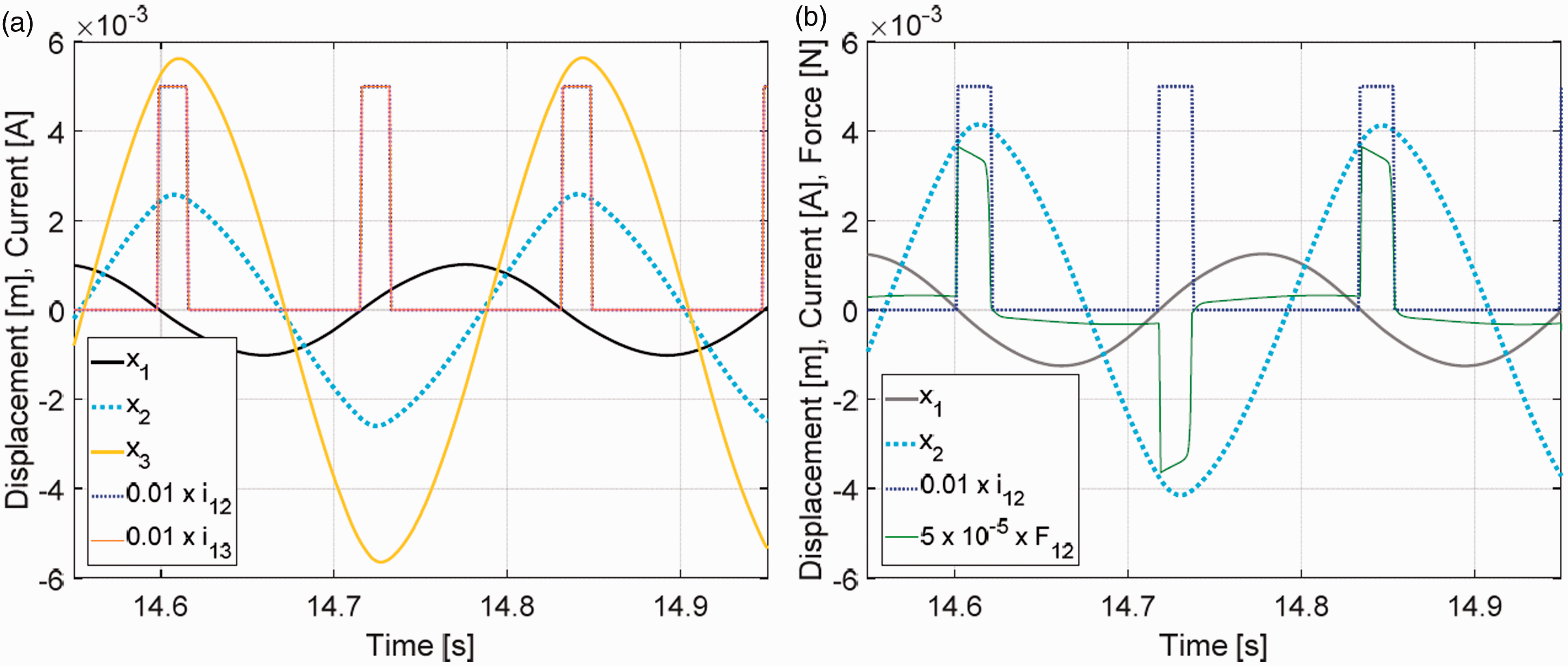
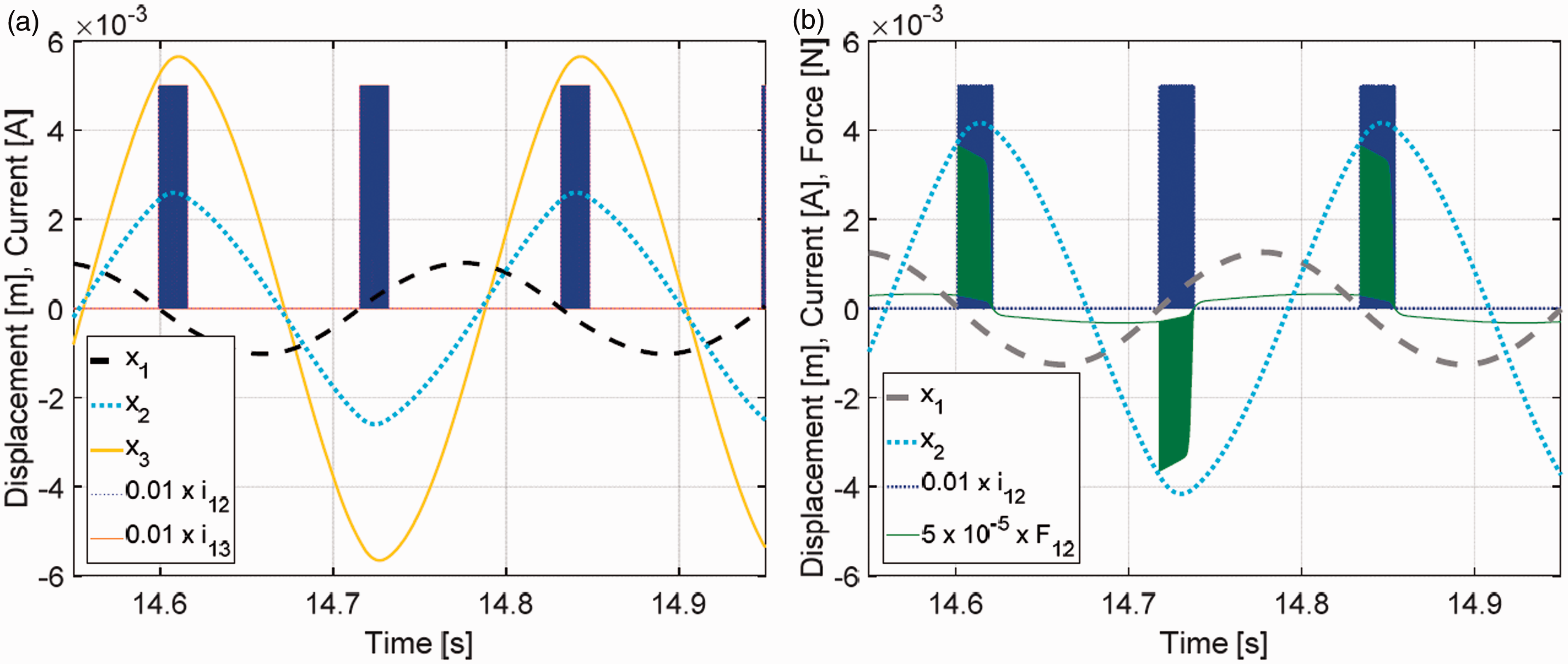
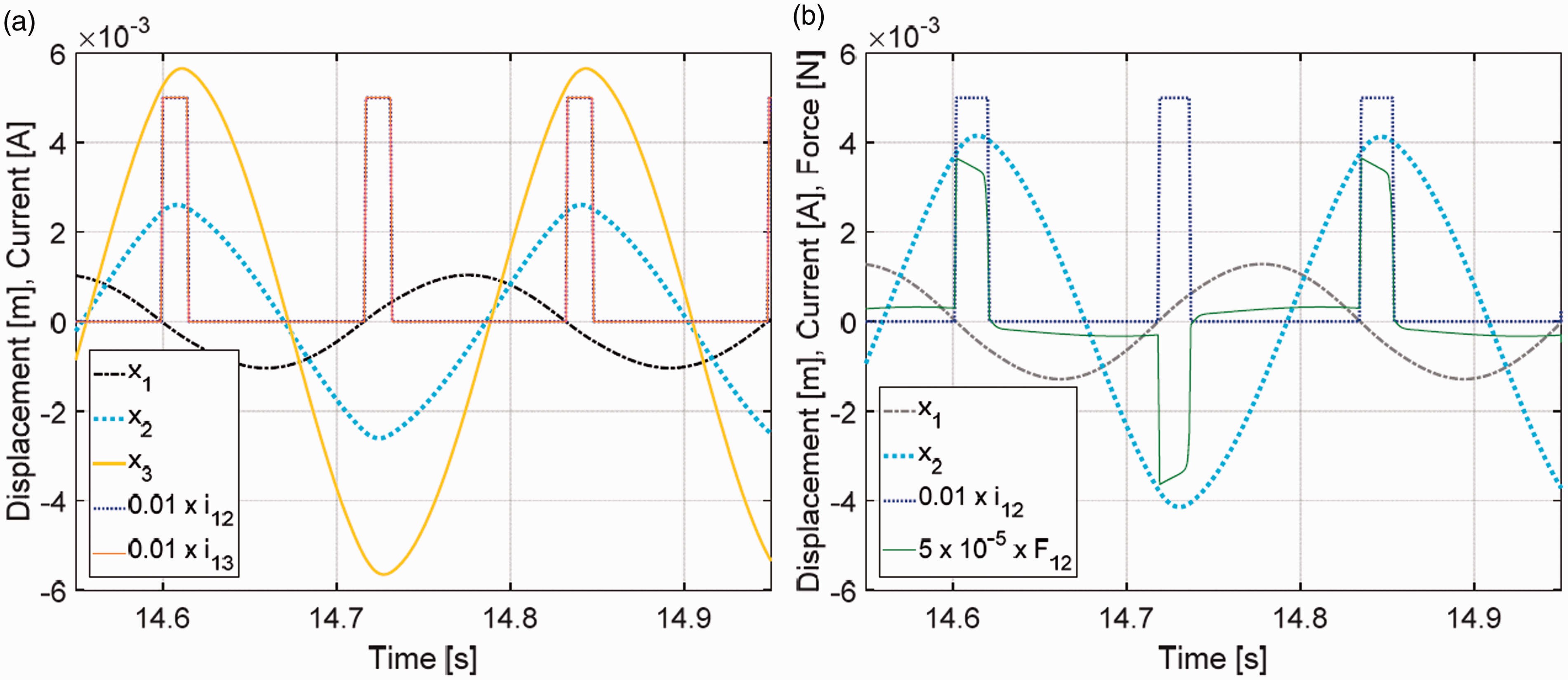
Figure 5 presents the comparison of DAFs for the Optimal control, Ground-Hook and Mod.GND law for the system with one and two MR TVAs. Figures 6 to 18 present the time patterns of , , , , obtained for the system with two MR TVAs (figure indices (a)) along with the time patterns of , , , and for the system with one MR TVA (figure indices (b); force is textualised as in figure legends for readability), for the Optimal control, Quasi-Optimal control, Mod.GND and the Ground-Hook law, at specific frequency points designated in Figure 4 as A (2.7 Hz), B (3.3 Hz), C (3.9 Hz) and D (4.3 Hz).
Dynamic Amplification Factor (DAF) frequency characteristics: Optimal control vs. Ground-Hook vs. Mod.GND.
It may be observed (see Figure 6 vs. Figure 8, frequency point A, 2.7 Hz) that control current and force patterns generated by the Mod.GND law are a precise replication of the respective patterns of the Optimal control approach. Thus at frequency points B, C and D, the Mod.GND patterns are omitted (presented together with the Optimal control patterns). The same concerns frequency characteristics of the Optimal control and Mod.GND law (see Figure 5), thus they are determined separately but presented together in Figures 19 and 20 (the differences between the determined Optimal control and Mod.GND frequency characteristics are negligibly small). It is also evident (see Figure 4) that the frequency characteristics of the Optimal control and Quasi-Optimal control approaches are practically the same; however, the control patterns are different (but have the same envelopes) due to the high frequency co-state resetting to zero (and so high frequency zeroing of and ) for the Quasi-Optimal control approach. As it was mentioned earlier, the baseline Optimal and Quasi-Optimal (Q-O HF) approaches differ only at a countable number of samples when the co-state integrators are all reset to zero for the Q-O HF, and this makes no observable difference regarding vibration reduction results. There may be observed steeper edges of and patterns for the Quasi-Optimal control due to the smallerts value adopted (see sections Baseline implementation technique and Alternative concepts).
Time responses at 2.7 Hz (A), Optimal control: two (a), one (b) MR TVA.
Time responses at 2.7 Hz (A), Quasi-Optimal control: two (a), one (b) MR TVA.
Time responses at 2.7 Hz (A), Mod.GND: two (a), one (b) MR TVA.
It may be observed that using two passive TVAs instead of one, assuming the same total TVA mass (21.46 kg) and adequate stiffness/damping tuning, results in maximum DAF reduction by nearly 0.5, thus it may be considered reasonable. However, the utilisation of 2 MR TVAs instead of 1 MR TVA, assuming again the same total TVA mass, and the same total MR damper force limitations, seems questionable, as the 2 MR TVA solution is more sensor (displacement x3, MR damper force F13), data processing and calculation demanding, while the benefits are evident above the 3.6 Hz oscillation frequency only. Regarding the maximum DAF (and so ) criteria, the 2 MR TVA solution advantage is minor.
Analysing the presented frequency characteristics and time patterns it may be concluded that the introduced Optimal control, Quasi-Optimal control and Mod.GND solutions are superior with regard to the passive TVA(s). The Ground-Hook law, in contrary to the Mod.GND approach, generates control current patterns resulting in force spikes of incorrect sign (at frequency points A and B, see Figure 9(b) and Figure 12(b)) or narrowed profiles of the maximum current (points C and D, Figures 15 and 18), that are different from the Optimal control/Mod.GND patterns, thus the Ground-Hook frequency characteristics (Figure 5) have noticeably higher values in wide frequency ranges than both the Optimal control and Mod.GND respective frequency characteristics.
Time responses at 2.7 Hz (A), Ground-Hook: two (a), one (b) MR TVA.
Time responses at 3.3 Hz (B), Optimal control/Mod.GND: two (a), one (b) MR TVA.
Time responses at 3.3 Hz (B), Quasi-Optimal control: two (a), one (b) MR TVA.
Time responses at 3.3 Hz (B), Ground-Hook: two (a), one (b) MR TVA.
Time responses at 3.9 Hz (C), Optimal control/Mod.GND: two (a), one (b) MR TVA.
Time responses at 3.9 Hz (C), Quasi-Optimal control: two (a), one (b) MR TVA.
Time responses at 3.9 Hz (C), Ground-Hook: two (a), one (b) MR TVA.
Time responses at 4.3 Hz (D), Optimal control/Mod.GND: two (a), one (b) MR TVA.
Time responses at 4.3 Hz (D), Quasi-Optimal control: two (a), one (b) MR TVA.
Time responses at 4.3 Hz (D), Ground-Hook: two (a), one (b) MR TVA.
Possible improvements
The results presented in the previous sections look encouraging. However, it was observed that further improvement is possible for the higher MR damper control current values. Assuming A, regarding the intermittent current limitation,21 the frequency characteristics presented in Figure 19 are obtained.
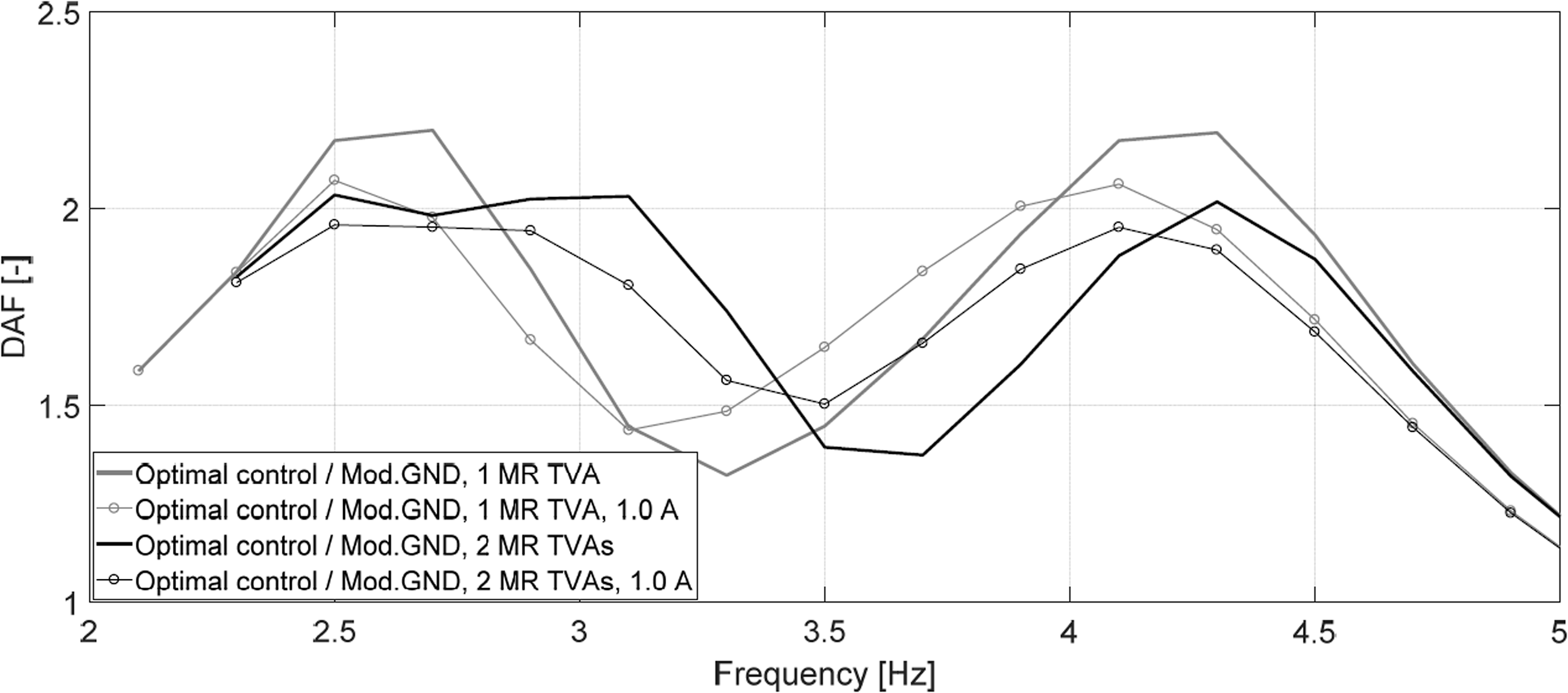
Dynamic Amplification Factor (DAF) frequency characteristics, Optimal control/Mod.GND: A (default here) vs. A.
Figure 19 shows a comparison of the frequency characteristics obtained for the Optimal control/Mod.GND law with 1 MR TVA and 2 MR TVAs assuming A or A. It may be observed that, in relation to A assumption, mainly right maxima are markedly lowered with A.
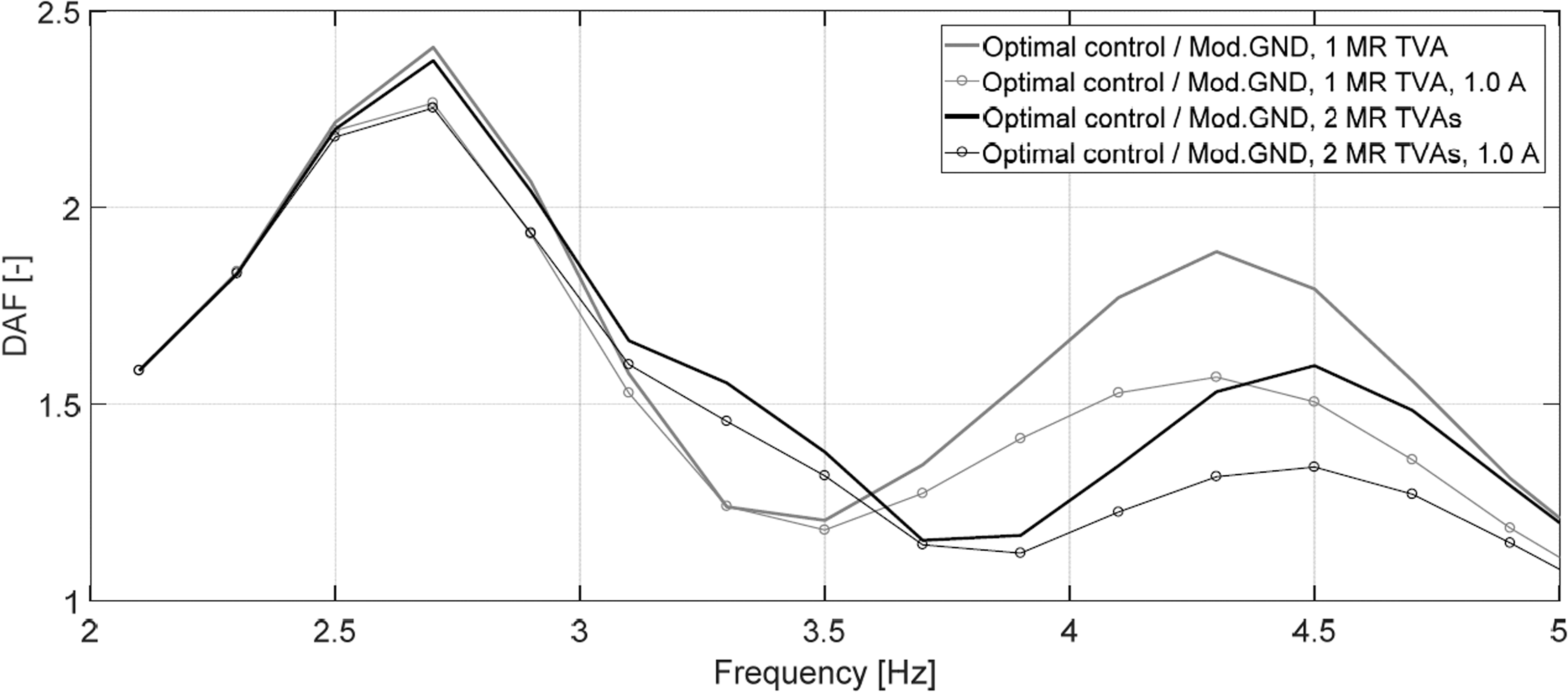
As the idea of the paper was to compare different approaches with one (or two) MR TVA(s), in relation to one standard passive TVA with , values set according to Den Hartog16 (or two passive TVAs with k2, k3, c2, c3 values tuned accordingly to obtain the maxima of the DAF frequency characteristics of equal/lowest values), thus (k2 and k3) value(s) was (were) maintained during all the simulation tests presented in Figures 6 to 18 (b) (Figures 6 to 18(a); information in the brackets concerns the 2 MR TVA system). However, each of the described control solutions exhibits a substantially higher left maximum of the frequency characteristics, than the right one. To lower that (the left) maximum and obtain equality of all the local maxima, passive spring(s) stiffness may be tuned, i.e. lowered. That is more crucial for the operation with 2 MR TVAs or/and A. To depict the control potential, values of (k2 and k3) were optimised with regard to the equality and minimisation of the frequency characteristics maxima separately for the one- and two-TVA system, for A and A. The results are presented in the Table 2 and Figure 20. The values of m1, c1, m2, ,m3 are kept unchanged (c2, and c3 are not used here).
Dynamic Amplification Factor (DAF) frequency characteristics, Optimal control/Mod.GND: A (default here) vs. A; k2, k3, values optimised (see Table 2).
Optimised k2, k3 and stiffness parameters.
System with:
Parameter
Stiffness value for A
Stiffness value for A
2 MR TVAs
k2
2846 N/m
2646 N/m
k3
5228 N/m
4658 N/m
1 MR TVA
8317 N/m
7582 N/m
Figure 20 shows that using A constraint, almost 50% reduction of DAF (and so the maximum amplitude of ) is possible with regard to the respective passive 1 TVA/2 TVA solutions (compare with Figure 4). Even if 1.0 A maximum current setting is unavailable due to the high duty cycle (resulting in the MR damper possible overheating), the primary system (structure) maximum displacement amplitudes obtained for A are reduced more than 40% with regard to the respective passive system amplitudes maxima. The implementation of the 2 MR TVA system instead of the 1 MR TVA seems more reasonable for the optimised stiffness values, regarding the primary system (structure) displacement amplitude (and DAF) maximum rather than its full frequency profile.
Conclusions
The aim of this research was to develop and investigate several nonlinear vibration control concepts, including the online implementation of the one-step optimal control, computationally less demanding quasi-optimal control, and simple yet reliable optimal-based modified ground-hook law, in relation to the standard ground-hook and passive solutions with one and two MR TVAs. Three of the proposed algorithms proved their efficiency in vibration reduction within a wide frequency range, including almost 50% reduction of DAF with regard to the respective optimally tuned passive 1 TVA/2 TVA configurations (assuming a 1.0 A intermittent MR damper current constraint21). Determination of the oscillation frequency for the MR TVA demanded stiffness/damping/friction calculation or for the algorithm parameters tuning is not necessary, thus online and real-time control implementation during transient, polyperiodic or random vibration phases is possible (which is not the case for many other solutions that have to switch to the passive mode during such phases). No offline calculation, nor excitations or disturbances assumption is necessary, both essential for continual online/real-time control.
The proposed Quasi-Optimal control method may save large computational load and its vibration control results are credible (as good as for the Optimal control), but sampling frequency has to be of the order of Hz to cope well with the terminal condition (5) error (slight performance degradation is observed for the sampling rate of Hz); piecewise quasi-optimality is assumed here. The modified two-level displacement ground-hook law (Mod.GND) is indeed the simple implementation of the optimal control for the case when only the primary system/structure displacement amplitude has to be minimised. However, the proposed (one-step) Optimal control and Quasi-Optimal control solutions are more general, as the adopted quality index may encompass minimisation of, e.g., the MR damper stroke or velocity, the primary structure acceleration, or the actuator(s) effort (the MR damper force or control current). The experimental, real-time verification of the proposed methods, along with the investigation of the influence of the expanded quality index elements values on the vibration control quality, using a specially developed and built wind turbine tower-nacelle laboratory model equipped with single MR TVA, is presented in Martynowicz.62
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by AGH University of Science and Technology [research program no. 11.11.130.766].
References
1.
CaterinoN.Semi-active control of a wind turbine via magnetorheological dampers. J Sound Vib2015;
345: 1–17.
2.
EnevoldsenIMorkKJ.Effects of vibration mass damper in a wind turbine tower. Mech Struct Mach1996;
24: 155–187.
3.
IwaniecJIwaniecMKasprzykS. Transverse vibrations of transmission tower of variable geometrical structure. J Low Freq Noise Vibr Active Control2018. DOI: 10.1177/1461348418781871.
4.
KucukIYildirimKSadekI, et al.
Optimal control of a beam with Kelvin–Voigt damping subject to forced vibrations using a piezoelectric patch actuator. J Vibr Control2015;
21: 701–713.
5.
MartynowiczP.Vibration control of wind turbine tower-nacelle model with magnetorheological tuned vibration absorber. J Vibr Control2017;
23: 3468–3489. DOI: 10.1177/1077546315591445.
6.
MartynowiczP.Study of vibration control using laboratory test rig of wind turbine’s tower-nacelle system with MR damper based tuned vibration absorber. Bull Polish Acad Sci Technol Sci2016;
64: 347–359.
7.
XuZDZhuJTWangDX.Analysis and optimisation of wind-induced vibration control for high-rise chimney structures. IJAV2014;
19: 42–51.
8.
WangXGordaninejadF.Lyapunov-based control of a bridge using magneto-rheological fluid dampers. J Intell Mater Syst Struct2002;
13: 415–419.
9.
WeberFMaślankaM.Precise stiffness and damping emulation with MR dampers and its application to semi-active tuned mass dampers of Wolgograd Bridge. Smart Mater Struct2014;
23: 015019.
10.
AliSFRamaswamyA.Hybrid structural control using magnetorheological dampers for base isolated structures. Smart Mater Struct2009;
18: 055011.
11.
EstekiKBagchiASedaghatiR. Semi-active tuned mass damper for seismic applications. In: Smart materials, structures & NDT in aerospace, Montreal, Canada, 2–4 November 2011.
12.
Bakhtiari-NejadFMeidan-SharafiM.Vibration optimal control of a smart plate with input voltage constraint of piezoelectric actuators. J Vibr Control2004;
10: 1749–1774.
13.
OatesWSSmithRC.Nonlinear optimal control techniques for vibration attenuation using magnetostrictive actuators. J Intell Mater Syst Struct2008;
19: 193–209.
14.
RoteaMALacknerMASahebaR. Active structural control of offshore wind turbines. In: 48th AIAA aerospace sciences meeting including the new horizons forum and aerospace exposition, Orlando, FL, 4–7 January 2010.
15.
TsouroukdissianACarcangiuCEPineda AmoI, et al. Wind turbine tower load reduction using passive and semiactive dampers. In: European wind energy association annual event, Brussels, Belgium, 14–17 March 2011.
16.
Den HartogJP.Mechanical vibrations.
Mineola:
Dover Publications, 1985.
17.
KooJHAhmadianM.Qualitative analysis of magneto-rheological tuned vibration absorbers: experimental approach. J Intell Mater Syst Struct2007;
18: 1137–1142.
18.
MartynowiczP.Control of an MR tuned vibration absorber for wind turbine application utilising the refined force tracking algorithm. J Low Freq Noise Vibr Active Control2017;
36: 339–353.
19.
KciukSMartynowiczP.Special application magnetorheological valve numerical and experimental analysis. Solid State Phenomena2011;
177: 102–115.
20.
LaalejHLangZQSapinskiB, et al.
MR damper based implementation of nonlinear damping for a pitch plane suspension system. Smart Mater Struct2012;
21: 045006.
21.
Lord Rheonetic. MR controllable friction damper RD-1097-01. Product Bulletin, 2002.
22.
NeelakantanVAWashingtonGN.Vibration control of structural systems using MR dampers and a ‘modified’ sliding mode control technique. J Intell Mater Syst Struct2008;
19: 211–224.
23.
SapińskiBRosółM.Autonomous control system for a 3 DOF pitch-plane suspension system with MR shock absorbers. Comput Struct2008;
86: 379–385.
MartynowiczP.Development of laboratory model of wind turbine’s tower-nacelle system with magnetorheological tuned vibration absorber. Solid State Phenomena2014;
208: 40–51.
26.
MartynowiczPSzydłoZ. Wind turbine’s tower-nacelle model with magnetorheological tuned vibration absorber: the laboratory test rig. In: Proceedings of the 14th International Carpathian Control Conference (ICCC), Rytro, Poland, 26–29 May 2013.
27.
RosółMMartynowiczP. Identification of the wind turbine model with MR damper based tuned vibration absorber. In: Proceedings of the 20th International Carpathian Control Conference (ICCC), Kraków-Wieliczka, Poland, 26--29 May 2019.
28.
SnaminaJMartynowiczP. Prediction of characteristics of wind turbine 0s tower-nacelle system from investigation of its scaled model. In: 6WCSCM: Sixth world conference on structural control and monitoring – proceedings of the 6th edition of the World conference of the International Association for Structural Control and Monitoring (IACSM), Barcelona, Spain, 15–17 July 2014.
29.
ZempRLleraJCBreschiL. Pendular tuned mass dampers in free-plan Chilean tall buildings. In: The 14th world conference on earthquake engineering, Beijing, China, 12–17 October 2008.
30.
KimHS.Seismic response control of adjacent buildings coupled by semi-active shared TMD. Int J Steel Struct2016;
16: 647–656.
31.
BathaeiAZahraiSMRamezaniM.Semi-active seismic control of an 11-DOF building model with TMD+MR damper using type-1 and -2 fuzzy algorithms. J Vibr Control2018; 24(13): 2938–2953.
32.
ErogluMASimsN. Observer based adaptive tuned mass damper with a controllable MR damper. In: Proceedings of the 9th international conference on structural dynamics – EURODYN, Porto, Portugal, 30 June to 2 July 2014.
33.
WeberF.Robust force tracking control scheme for MR dampers. Struct Control Health Monit2015;
22: 1373–1395.
34.
WeberFDistlHFischerS, et al.
MR damper controlled vibration absorber for enhanced mitigation of harmonic vibrations. Actuators2016;
5: 27.
35.
MaślankaM. Measured performance of a semi-active tuned mass damper with acceleration feedback. In: Proceedings of SPIE 10164, Active and passive smart structures and integrated systems2017, Portland, OR, 25–29 March 2017.
36.
WeberF.and Maślanka M. Precise stiffness and damping emulation with MR dampers and its application to semi-active tuned mass dampers of Wolgograd Bridge. Smart Mater Struct2014;
23: 015019.
37.
BrysonAEHoYC.Applied optimal control.
Abingdon:
Taylor & Francis, 1975.
38.
PrimbsJANevisticVDoyleJC.Nonlinear optimal control: a control lyapunov function and receding horizon perspective. Asian J Control1999;
1: 14–24.
39.
OveisiAGudarziM.Adaptive sliding mode vibration control of a nonlinear smart beam: a comparison with self-tuning Ziegler-Nichols PID controller. J Low Freq Noise Vibr Active Control2013;
32: 41–62.
40.
PaiNSYauHT.Suppression of chaotic behavior in horizontal platform systems based on an adaptive sliding mode control scheme. Commun Nonlinear Sci2011;
16: 133–143.
41.
FreemanRAKokotovicPV.Robust nonlinear control design: state-space and lyapunov techniques.
Boston, MA:
Birkhauser, 1996.
42.
ChenCLPengCCYauHT.High-order sliding mode controller with backstepping design for aeroelastic systems. Commun Nonlinear Sci2012;
17: 1813–1823.
43.
ItikM.Optimal control of nonlinear systems with input constraints using linear time varying approximations. Nonlinear Anal: Model Control2016;
21: 400–412.
IoffeADTihomirovVM.Theory of extremal problems. Studies in mathematics and its applications.
Amsterdam–New York–Oxford:
North-Holland Publishing Company, 1979.
47.
MaślankaMSapińskiBSnaminaJ.Experimental study of vibration control of a cable with an attached MR damper. J Theor Appl Mech2007;
45: 893–917.
48.
LenhartSWorkmanJT.Optimal control applied to biological models.
New York:
CRC Press, 2007.
49.
BianYGaoZ.Nonlinear vibration control for flexible manipulator using 1: 1 internal resonance absorber. J Low Freq Noise Vibr Active Control2018; 37(4): 1053–1066.
50.
PintoSGRodriguezSPTorcalJIM.On the numerical solution of stiff IVPs by Lobatto IIIA Runge-Kutta methods. J Comput Appl Math. 1997;
82: 129–148.
HeJH.Variational iteration method – a kind of nonlinear analytical technique: some examples. Int J Non-Linear Mech1999;
34: 699–708.
53.
LiaoSJChwangAT.Application of homotopy analysis method in nonlinear oscillations. J Appl Mech1998;
65: 914–922.
54.
HeJH.A coupling method of a homotopy technique and a perturbation technique for non-linear problems. Int J Non-Linear Mech2000;
35: 37–43.
55.
LiaoSJ.Beyond perturbation: introduction to the homotopy analysis method.
Boca Raton, FL:
CRC Press, 2003.
56.
HeJH.Some asymptotic methods for strongly nonlinear equations. Int J Mod Phys B2006;
20: 1141–1199.
57.
HeJHWuXH.Variational iteration method: new development and applications. Comput Appl Math2007;
54: 881–894.
58.
Mohyud-DinSTSikanderWKhanU, et al.
Optimal variational iteration method for nonlinear problems. J Assoc Arab Univ Basic Appl Sci2017;
24: 191–197.
59.
GanjiDDTariHJooybariMB.Variational iteration method and homotopy perturbation method for nonlinear evolution equations. Comput Math Appl2007;
54: 1018–1027.
60.
HeJH.Variational iteration method – some recent results and new interpretations. J Comput Appl Math2007;
207: 3–17.
61.
WuYHeJH.Homotopy perturbation method for nonlinear oscillators with coordinate-dependent mass. Results Phys2018;
10: 270–271.
62.
MartynowiczP.Real-time implementation of nonlinear optimal-based vibration control for a wind turbine model. J Low Freq Noise Vibr Active Control2018; Article published online: 24 August, 2018. DOI: 10.1177/1461348418793346.
63.
Shen YJ, Wang L, Yang SP and Gao GS. Nonlinear dynamical analysis and parameters optimization of four semi-active on-off dynamic vibration absorbers. Journal of Vibration and Control 2013; 19(1): 143–160.