
Abstract
An optimal delayed feedback control methodology is developed to mitigate the primary and super harmonic resonances of a flexible simply-simply supported beam with piezoelectric sensor and actuator. Stable vibratory regions of the feedback gains are obtained by using the stability conditions of eigenvalue equation. Attenuation ratio is used to evaluate the performance of vibration control by taking the proportion of peak amplitude of primary or super harmonic resonances for the suspension system with and without controllers. Optimal control parameters are obtained using an optimal method, which takes attenuation ratio as the objective function and the stable vibratory regions of the time delay and feedback gains as constraint conditions. The piezoelectric optimal controllers are designed to control the dynamic behaviour of the nonlinear dynamic system. It is found that the optimal feedback gains obtained by the optimal method result in a good control performance.
Introduction
In the past decades, considerable amount of research works have helped us better understand the effect of time delays on the behaviour of nonlinear dynamical systems controlled by linear or nonlinear feedback controllers for mitigating the vibration amplitude. Delayed vibration control is a technique of vibration suppression. The time delay can vary a fixed gain and change the range of saturation control, either widening or shrinking the effective frequency bandwidth. Since delayed control in nonlinear systems has an important role in vibration control engineering, the study of delayed vibration control of nonlinear systems is essential.
Analytical methods for weakly nonlinear continuous systems include harmonic balance method, the Galerkin procedure and directed multiple scales. The first two approximate methods are easy and straightforward to apply. While the calculation of higher-order approximations may be complex. In the third approach, one calculates an approximate solution of the nonlinear differential equation by directly using multiple scales to expand the nonlinear governing partial differential equation and boundary conditions continuous problem. 1 The obtained mode shapes are in full agreement with those obtained by using discretization because the latter are performed by using a complete set of basic functions that satisfy the boundary conditions. This method is beneficial to the elimination of coupling terms and removal of solving multi-dimensional equations, and can be easily applied to analyse the dynamic response of higher modes.
The technique of delayed-feedback control was introduced as an effective means of controlling a wide variety of mechanical systems. Olgac and Holm-Hansen 2 introduced the concept of delayed resonators to control mechanical systems. This concept was utilized to study time-delayed acceleration feedback control over continuous systems3,4 and time-delayed velocity feedback control over torsional mechanisms.5,6 Jalili and Olgac 7 used time-delayed feedback resonators to control discrete multi-degree-of-freedom systems. Zhao and Xu 8 used delayed feedback control to suppress the vibration of vertical displacement in a two-degree-of-freedom nonlinear system with external excitation. Plaut and Hsieh 9 studied the effect of a damping time delay on nonlinear structural vibrations and analysed six resonance conditions. Sato et al. 10 discussed the free and forced vibration of nonlinear systems with the time delays. Hu et al. 11 studied the primary resonance, super harmonic resonance and stability of a nonlinear Duffing oscillator with time delays under harmonic excitations and gave out periodic solutions by using the method of modified target practice. Maccari 12 dealt with the principal parametric resonance of a van der Pol oscillator with time-delay linear state feedback. Ji and Leung 13 demonstrated that in parametrically excited Duffing systems stable region of the trivial solution could be broadened, a discontinuous bifurcation could be transformed into a continuous one and the jump phenomenon in the response could be removed, if an appropriate feedback control was used. Ji and Leung 14 also studied the primary, super harmonic and subharmonic resonances of a harmonically excited nonlinear single degree of freedom system with two distinct time delays in the linear state feedback. The primary resonance of a cantilever beam under state feedback control with a time delay was investigated. 15 Qian and Tang 16 discussed the primary resonance and the subharmonic resonances of a nonlinear beam under moving load based on time-delay feedback control. Daqaq et al. 17 presented a comprehensive investigation on the effect of feedback delays on the nonlinear vibrations of a piezoelectric actuated cantilever beam and analysed the effect of feedback delays on a beam subjected to a harmonic base excitations. Alhazza et al. 18 investigated the effect of time delays on the stability, amplitude and frequency–response behaviour of a beam and found that even the minute amount of delays could completely alter the behaviour and stability of the parametrically excited beam and lead to unexpected behaviour and response. Liao et al. 19 presented a feasible methodology by which could achieve good control performance of a dynamic beam structure system with time delay effect. A spring time-delay controller was designed to achieve good control performance. Liu et al. 20 studied the primary, subharmonic and super harmonic resonances of an Euler–Bernoulli beam subjected to harmonic excitations with damping and spring delayed-feedback controllers. Gao and Chen 21 combined cubic nonlinearity and time delay to improve the performance of vibration isolation. A time delayed nonlinear saturation controller was proposed to reduce the horizontal vibration of a magnetically levitated body described by a nonlinear differential equation subjected to both external and modulated forces. 22 The time delay saturation-based controller was considered for active suppression of nonlinear beam vibrations, and the effects of time delays on the system behaviour were studied. 23
The research works mentioned above are concerned with the selection of feedback gains and time delays that can enhance the control performance of nonlinear systems or change the position of the bifurcation point. However, all these works have failed to address how to choose optimized control parameters and time delays on the basis of keeping the system stable. In this paper, delayed piezoelectric feedback controllers are designed to change the beam’s nonlinear dynamical behaviour. The feedback gains and time delays of piezoelectric controllers are easy to set up and change by using active control facilities.
The main purpose of this paper is to present an optimum control method for a nonlinear vibration system. The stable vibratory regions of time delay and feedback gains are given based on the analysis of stability conditions of eigenvalue equation. The control parameters are calculated with an optimal method, which takes attenuation ratio as the objective function and stable vibratory regions of time delays and feedback gains as constraint conditions. The multiple scales method is applied to obtain linear equations, by which it is easy to analyse the dynamic behaviour of high order modes of the beam. Time delay is taken as a control factor that can turn defective effect into favourable effect. Compared with damping force controllers, time delayed controllers have three parameters to be adjusted, two feedback gains and a time delay. Therefore, the space of design and adjustment is much wider. A closed-loop control system is designed to control the dynamic behaviour of the nonlinear dynamic system.
Primary resonance analysis
Programme formulation
The beam is assumed to be inextensible, has uniform cross-sectional area and satisfies the Euler–Bernoulli beam theory. The simply-simply supported boundary conditions are considered (see as Figure 1).
Schematic drawing of a piezoelectric actuated beam under harmonic excitations.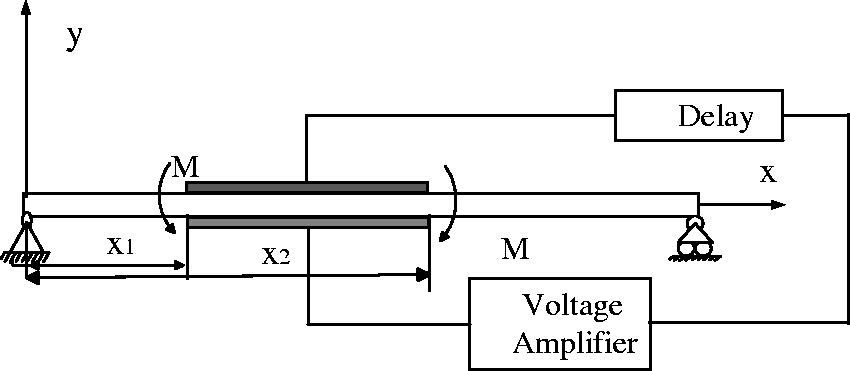
The uniform flexible beam with a piezoelectric sensor layer on its top surface and a piezoelectric drive layer on its low surface is considered. The piezoelectric sensor bends with deformation of the beam, which is excited by a harmonic excitation. The voltage of the piezoelectric sensor layer, which is induced by the deformation along the beam direction, is given as24,25


The non-dimensional form of equation of motion and boundary conditions of the beam can be obtained as26,27









The solvability condition requires that the eigen functions are orthogonal



Let


By letting


Using modulation equations, the amplitude–frequency equation of the system can be obtained

The peak amplitude of the primary response, obtained from equation (19), is given by

For the purpose of comparison, the equation of motion for the nonlinear primary oscillator without control is

The corresponding peak amplitude for the nonlinear primary oscillator without control can be written as

The performance of the vibration controllers on the reduction of nonlinear vibrations cannot be studied by using a similar procedure that discusses the ratio of response amplitude of the linear system because of the difficulty of finding the analytical solutions for a nonlinear system. Therefore, an attenuation ratio is utilized to evaluate the performance of the vibration controller by taking the proportion of vibration peaks of primary resonances of the beam system with and without control.30,31 By this definition, the attenuation ratio can be written as

As defined by equation (23), a small value of the attenuation ratio R indicates a large reduction in the vibrations of the nonlinear primary system. From equations (17) and (18), it is known that the damping coefficients are functions of feedback gain and time delay. Small attenuation rate can be obtained by selecting proper parameters of feedback gain and time delay.
Controller design for primary resonance
For nonlinear systems, the nonlinear phenomena such as jump phenomenon and hysteresis may occur and the vibration of the system may become unstable. The vibration controllers should be designed to avoid the unstable vibration and reduce nonlinear vibration amplitude. The stability of the solutions depends on the eigenvalues of the corresponding Jacobian matrix of equations (17) and (18). The corresponding eigenvalues are the roots of equation

The sum of the two eigenvalues is −2μk. The addition of the feedback gain and time delay alters the sum of the two eigenvalues. If μk < 0, it means at least one of the eigenvalues will always have a positive real part. The system will be unstable. If μk = 0, it means a pair of purely imaginary eigenvalues and hence a Hopf bifurcation may occur. Based on the analyses mentioned above, unstable periodic solutions corresponding to a saddle is


If μk > 0, the sum of two eigenvalues is negative, and accordingly, at least one of the two eigenvalues will have a negative real part. The sufficient conditions for guaranteeing the system stability are16,32,33

The value of

The region of stable vibration control parameters can be obtained

When there are two solutions of equation

As


Considering the formula of

Taking into account the formula (32), gives

Analysis of optimised controller design parameters
The region of feedback parameter has been obtained based on the analysis of stability condition of the nonlinear vibration system, but it is difficult to obtain the optimal control parameters of the system. Taking the nonlinear vibration system with attenuation ratio as the objective function, the optimal feedback control parameters can be calculated with an optimal method. The optimal analysis is carried out by taking into account the two cases with and without solutions of the critical equation.
Optimal design when the critical equation has no solution


Optimal design when the critical equation has two solutions



Super harmonic resonance analysis
Super harmonic resonance
For the case of super harmonic resonance, the harmonic excitation is assumed that

Substituting equations (5) and (37) into equation (3) and equating coefficients of like powers of ɛ, the following equations are derived




The solution of equation (38) is written as follows


Let




By eliminating

The peak amplitude of the super harmonic resonance, which is obtained from equation (48), is given by

For the purpose of comparison, the corresponding peak amplitude of the nonlinear super harmonic oscillator without control is

The attenuation ratio of nonlinear super harmonic can be written as
24

The steady-state solutions of super harmonic resonance response depend on the eigenvalues of the characteristic equation, which are the roots of

Optimal design of controller parameters
Taking the attenuation ratio of super harmonic resonance as the objective function, the optimal feedback control parameters can be worked out by the optimal method.
When the critical equation has no solution


When the critical equation has two solutions



Numerical simulation
The nonlinear vibration control for a simply-simply supported beam is studied in the present paper. The length, width and height of beam are 500 mm, 50 mm, and 1 mm, respectively. The density and elastic modulus of the beam are 2700 kg m−3 and 70 GPa, respectively. Both the length and width of piezoelectric sensor are 30 mm. The thickness of piezoelectric sensor is 0.2 mm, the piezoelectric constant is d31 = 190 e − 12 mV−1, the piezoelectric capacitance is Cs = 15 nf, elastic modulus of the piezoelectric actuators Epe = 63 GPa, and the constant of piezoelectric is g31 = 1.9 C m−2. Other parameters are α = 0.5, η = 0.1, σ = 0.01 and B1 = 0.1, respectively. The control analysis is carried out only for the first mode of the beam, and the control analysis of high modes is similar.
Figure 2 shows the variation of damping coefficient μ1 of the nonlinear vibration for first order mode of the beam with feedback gain and time delay.
Variation of 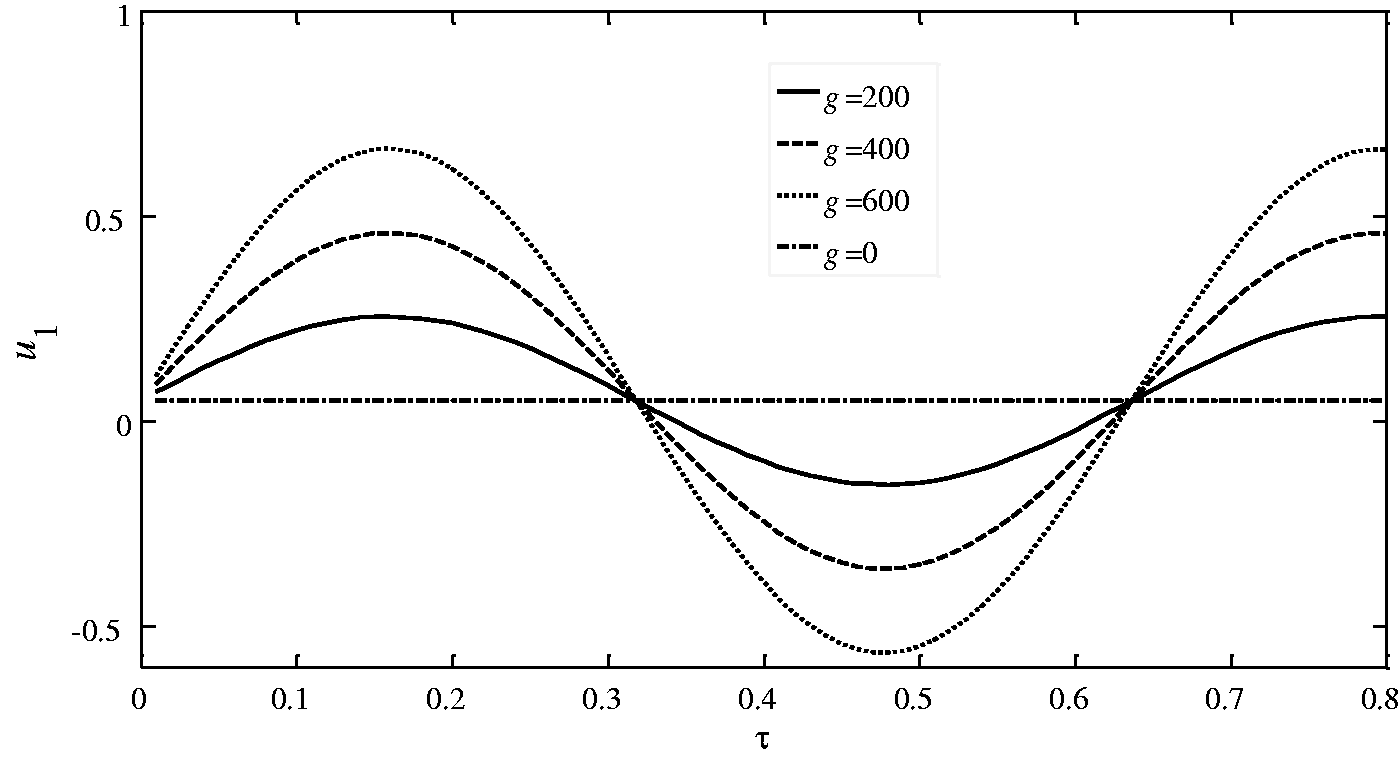
The damping value varies with the alteration of time delay when the value of feedback gain is fixed. Usually, μ1 should have a larger positive value in order to improve the control performance. For the cases of three distinct feedback gains, the effective time delay region of vibration damping which μ1 is greater than μ is from 0 to 0.32 and 0.64 to 0.80. The damping coefficient reaches the peak of primary resonance when the time delay is 0.16. Figure 3 displays the alteration of tuning coefficients of beam’s primary and super harmonic resonance of first-order mode with the time delay, respectively. It is found that the tuning coefficient varies with the alteration of feedback gain and time delay. Based on the analysis of Figures 2 and 3, it can be observed that stable vibration can be obtained by selecting proper feedback gain and time delay, and the peak amplitude of the resonance can be thus reduced.
Variation of 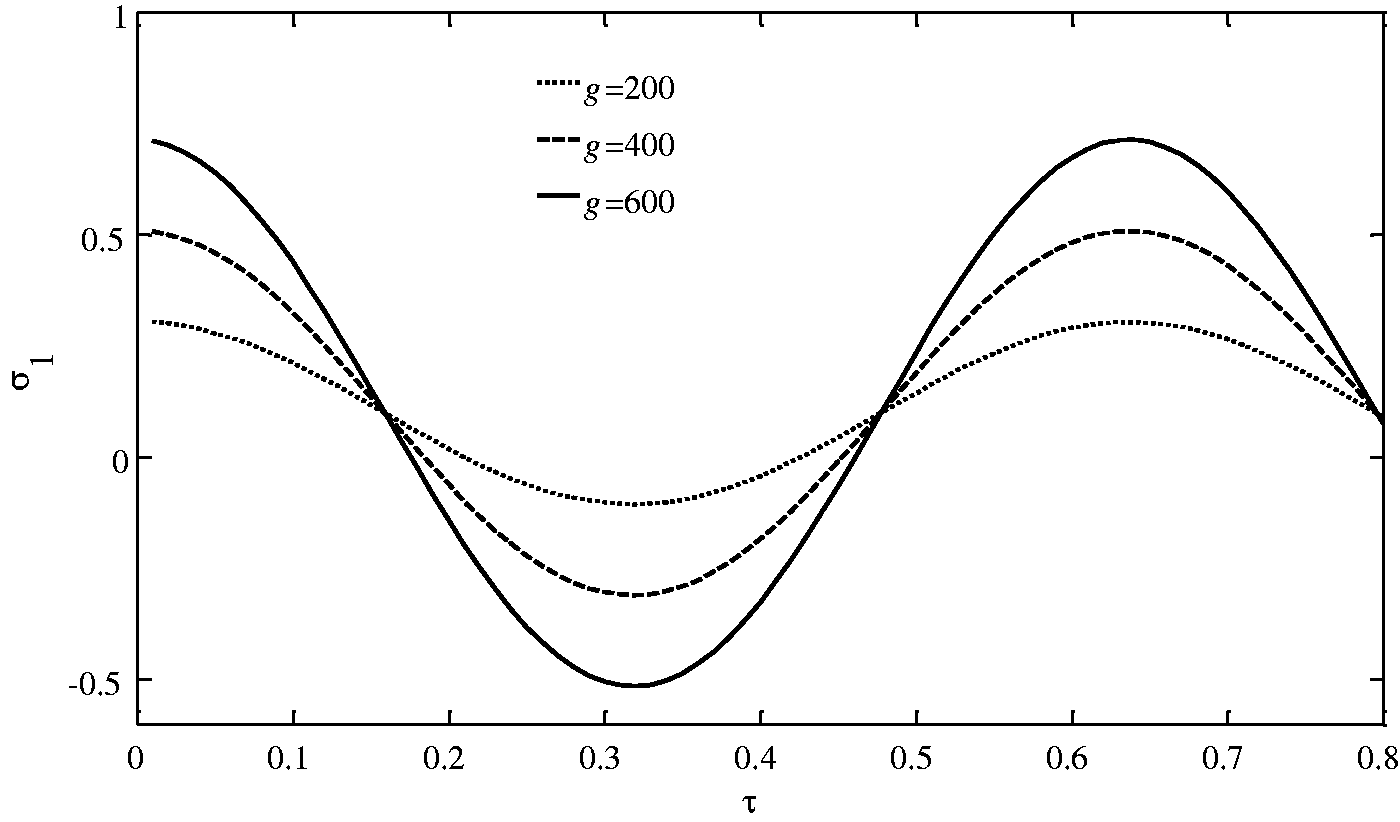
Figure 4 displays the variation of attenuation ratio R1 with time delay and feedback gain. As shown in the figure, for fixed value of the amplitude of excitation, a smaller value of the attenuation ratio R1 indicates a larger reduction in the primary resonances of the nonlinear system. A good selected value of time delay can relatively lead to a larger positive value of μ1 and a smaller attenuation ratio R1. Therefore, the amplitude of vibration of the nonlinear system can be reduced by properly selecting the feedback gain and the time delay.
Variation of R1 with time delay of the first mode primary resonance of the beam for different feedback control parameters.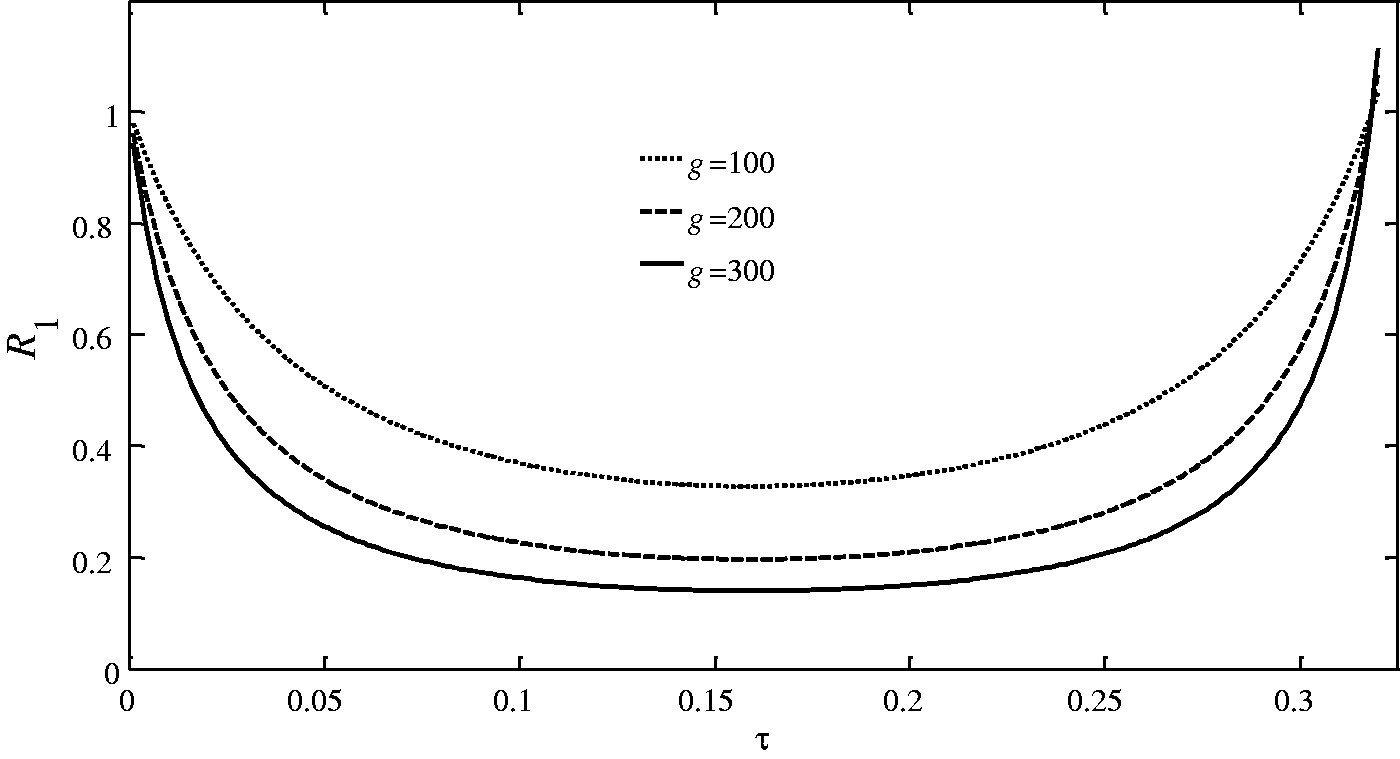
Taking the nonlinear vibration system with attenuation ratio as the objective function and the stable vibratory regions of the time delays and feedback gains as constraint conditions, the optimal feedback control parameters can be calculated by using the optimal method. The case that the characteristic equation has no solution is taken into account as an example to discuss the control parameters. As the value of η and Λ1 are all positive values in this example through calculation, the value of gτ should be positive in order to get better control performance shown in the formulation (34). A greater value of gτ can lead to a smaller attenuation rate R1, and a better control performance can be obtained. It is also found that gτ is the function of excitation amplitude F1. When the value of F1 is bigger, a larger value of control parameter is demanded to mitigate the vibration. The effect of the excitation amplitude on the stable minimum control parameters for three sets of time delays is shown in Figure 5.
Stable minimum control parameters of the first mode primary resonance of the beam for three sets of time delays.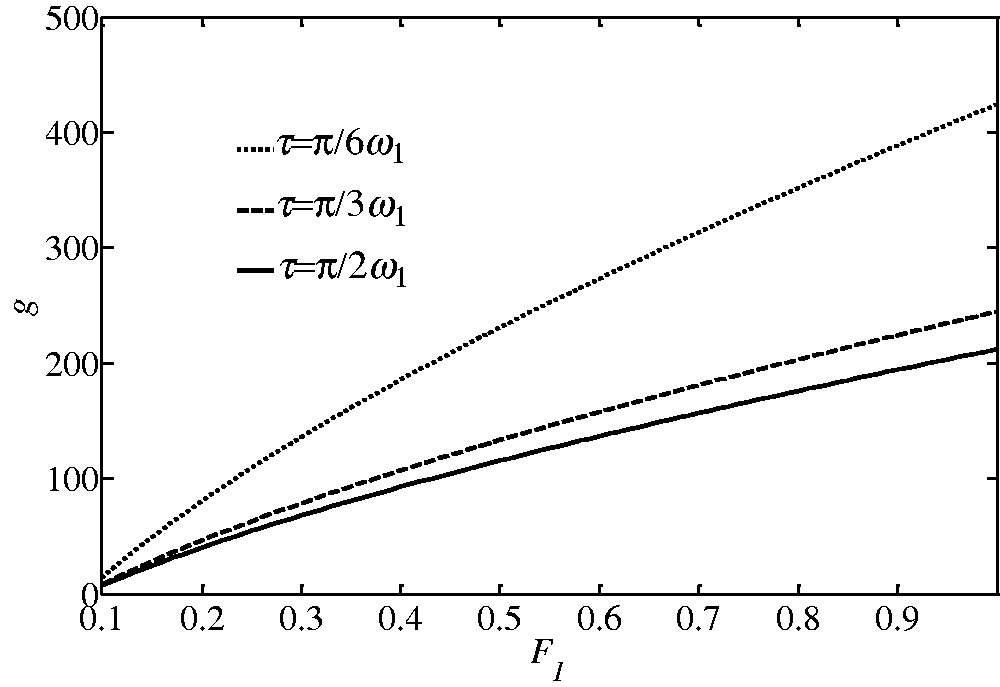
The stable minimum feedback gain varies from a small value to a big one with an increase in the value of excitation amplitude of F1. The stable minimum feedback gain also changes with variation of the value of time delay. In the region of 0-л/2ω1, a large value of time delay is prone to need a small feedback gain to control the vibration of the system. The optimal control time delay can be obtained when τ = л/2ω1, by which the smallest feedback gain g can be used to reduce the vibration. So the optimal control time delay can be taken as a control factor to improve the control performance as same as feedback gain. A good control performance can be obtained by selecting an optimal time delay.
The amplitude of excitation F1 is 0.2. It can be worked out that the product of feedback gain g and sin(ω1τ) is more than 40.3141 when the characteristic equation has no solution. Let τ = л/3ω1. The optimal feedback gain can be calculated as g ∈ [−778.9,1581.2] for the case that there are two solutions for the characteristic equation.
The calculation of optimal feedback gain and time delay of super harmonic resonance follows the same procedure as the primary resonance. It can be calculated that the product of g and sin(ω1τ) is more than 12.16 when the characteristic equation has no solution and B1 = 0.12. Letting τ = л/3ω1, the optimal feedback gain is calculated as gε[184.8,473.1] when the characteristic equation has two solutions.
Figures 6 and 7 show the primary and super harmonic response curves of first mode of the beam with three different sets of the time delay. There is no jump and hysteresis phenomenon when τ = л/6ω1 or τ = л/3ω1. This suggests that saddle node bifurcation and jump phenomenon can be eliminated by choosing certain values of the time delay. Three solutions exist in a region of coexistence of τ = 0. The bending of the frequency response curves is the cause of a jump phenomenon. Moreover, the peak amplitude of the primary resonance response at τ = л/3ω1 is the smallest one in the three cases. The vibration controllers can effectively suppress the amplitude oscillations of the nonlinear oscillator. Hence, by optimally choosing the feedback gain and time delay of the piezoelectric controllers, the primary and super harmonic resonance response of the nonlinear oscillator can be reduced.
Frequency–response curves for the first mode primary resonance of the beam for three sets of time delays. Frequency–response curves for the first mode super harmonic resonance of the beam for three sets of time delays.
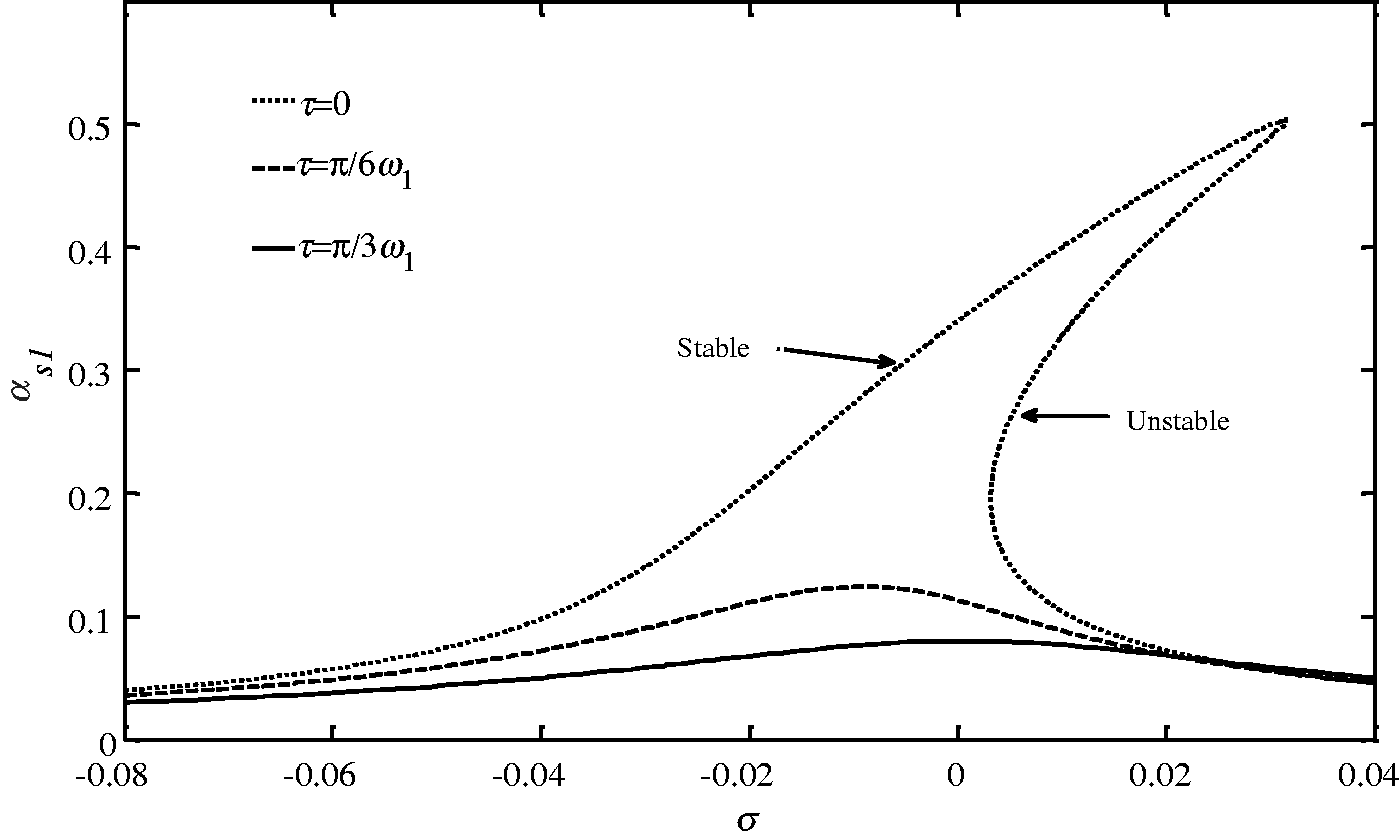
Figure 8 shows the primary response curves of first mode with different sets of the time delays and amplitudes of excitations. The feedback gain is also selected as 0.35. As shown in the figure the vibration of the system is unstable with τ = 0 and stable with τ = л/6ω1 when the amplitude of the excitation is 0.25. The vibration of the system can be stable and the vibration displacement be mitigated when the amplitude of excitation changes from 0.25 to 0.45 and the time delay from л/6ω1 to л/2ω1. Hence, the time delay can be used as a control factor to suppress the resonance response of the nonlinear oscillator by choosing optimal value of the time delay.
Frequency–response curves for the first mode primary resonance of the beam for different excitations and time delays.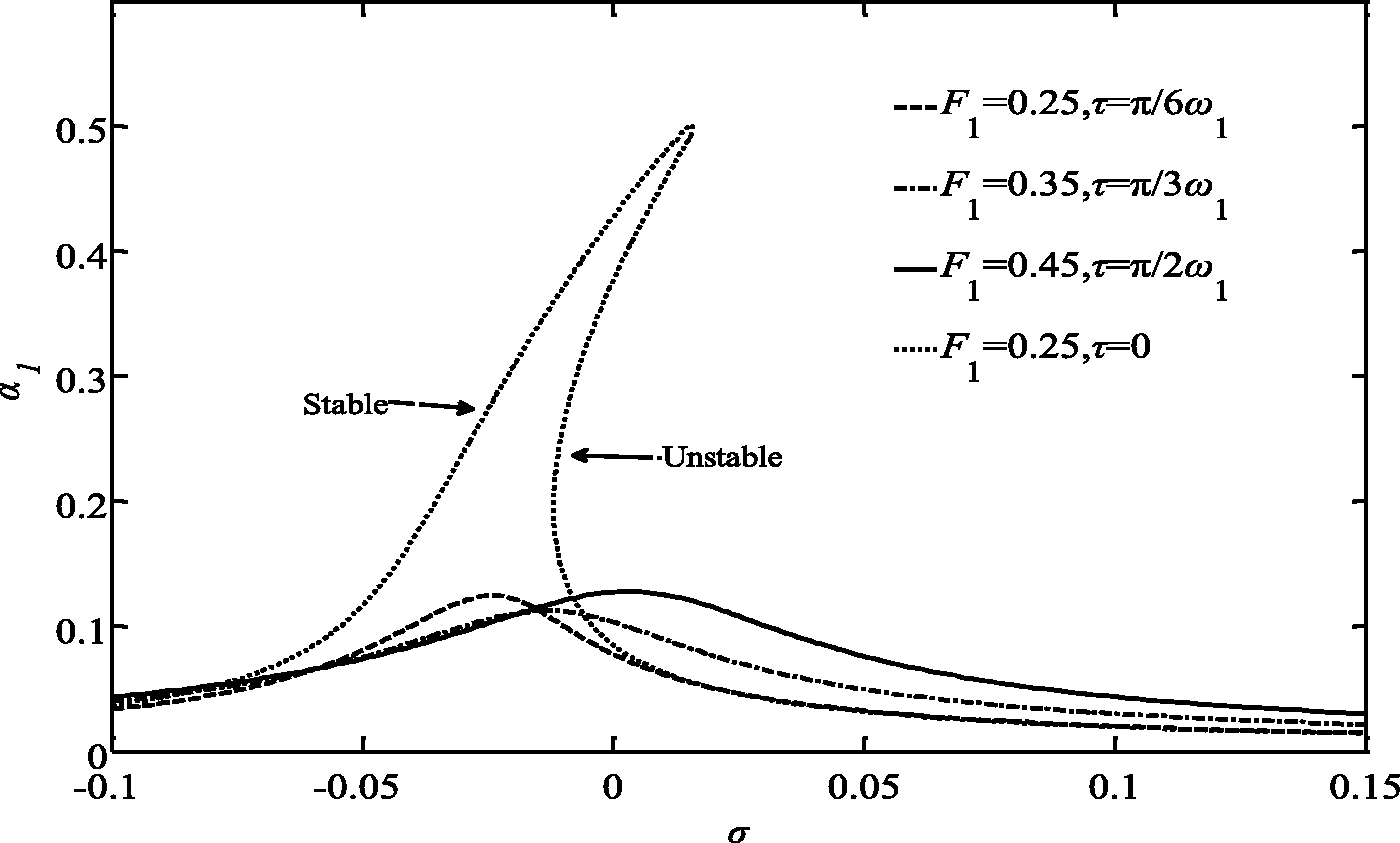
Figure 9 shows the critical curve of saddle bifurcation of the beam for different kinds of time delays. When Critical curve of saddle bifurcation of the beam for different time delays.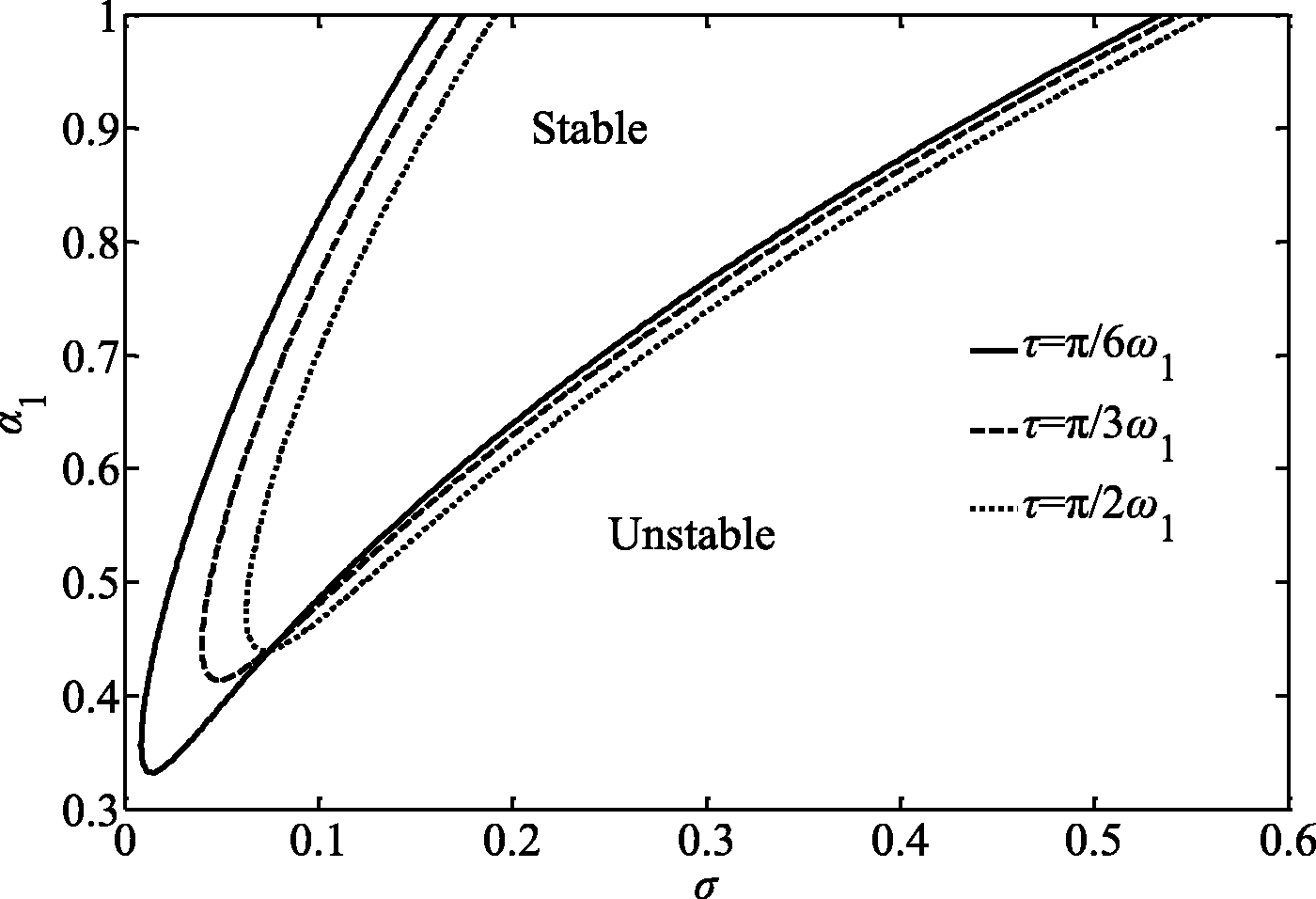
Conclusions
The regions of time delay and feedback gains are obtained by enlarging or reducing the inequalities of the roots of eigenvalue equation. The primary and super harmonic resonance response of the nonlinear oscillator can be reduced by choosing stable feedback gains and time delay. The optimal control parameters of feedback gain and time delay are calculated by using the method of minimum optimal attenuation ratio, which takes the attenuation ratio as the objective function and stable regions of the time delay and feedback gain as constrained conditions. Optimal control performance can be achieved by using the optimal time delay and feedback gain controller. The value of the time delay can change the stable structure of the nonlinear vibration system. The intelligent control system attached piezoelectric elements has the characters of high efficiency and low energy consumption, therefore it can be widely used in the vibration control of the flexible structure.
Test cases are designed and the simulation results are studied. Time-delay feedback controllers can be utilized to suppress the dynamic behaviours of nonlinear systems. Most of the vibration energy of the nonlinear oscillator is transferred to the controllers through piezoelectric controller. The optimal vibration controllers can effectively suppress the amplitude of oscillations of the nonlinear oscillator.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.