
Abstract
The nonlinear vibration effect of nanobeam and problem of the pull-in between the nanobeam and driven plate are the factors which prevent nano-resonator from improving the performance. The nonlinear governing differential equation is built by considering the axial force with piezoelectric controller. The piezoelectric time-delay electrostatic pull-in control is studied and the first-order approximate solution of nonlinear equation is gotten by using the method of multi-scale. The amplitude–frequency and phase frequency response equation of nonlinear vibration system are given for the primary resonance response of the nanobeam. The relationship between the control effect and feedback control parameters is studied. It is found that the piezoelectric time-delay control can change the critical voltage but not the critical position. The axial force can affect the performance of nanobeam.
Introduction
With the rapid development of electronic technology, the fabrication of resonators with high fundamental frequency and high quality factor has become a very active research field for more than 10 years. The applications of high frequency circuits and clock signal circuit of new generation high performance computer have put forward the new requirements for the performance of resonators. However, nano structure acted as the core components of the high-frequency resonator,1–4 its performance is affected by the pull-in effect and nonlinear vibration, which exists between nanobeam structure and drive plate. Therefore, it urgently needs a kind of control method to meet the needs of the resonator of nanobeam vibration.
In recent years, the linear vibration of structures with axial force has become one of the hot research issues. The flexural vibration frequency of the structure as a function of the axial force was investigated and the influence of axial force on vibration characteristics was given.5–7 An Euler–Bernoulli beam with constant axial force was considered in the study of the energy density and energy intensity of the beam. 5 Lee and Lee presented a transfer matrix expression method to determine the eigenpairs of a rotating beam considering the effects of the axial force. 6 The flexural vibration frequency in the antisymmetric mode of a thick plate was investigated considering the axial force. 7 The determination of the internal axial force and end restraints in tie rods and cables using vibration-based methods has been studied in the area of structural health monitoring and performance assessment. 8 Mirjavadi et al. aimed to study the buckling and free vibrational behavior of axially functionally graded nanobeam under thermal effect for the first time. 9 However, it is difficult to control the vibration of nanobeam with nano-size compared with macroscopic and large-scale beam. The axial force control is one of the effective methods for vibration control of nanobeam.
The nonlinear vibration of structure considering axial force has attracted the attention of researchers. Based on Euler–Bernoulli theory, Yan and Jiang 10 and Zhang et al. 11 studied the effect of surface stress on the vibration and buckling behavior of piezoelectric nanobeams and thin films. Based on the theory of non-local continuum, Wang and Li 12 analyzed the influence of an axial force and small-scale effect on the nonlinear principal resonance of nanobeams. The axial force acting on the two ends of the nanobeam can produce the hardening effect of the beam and further affect the nonlinear vibration characteristics of the nanometer beam. Li et al. 13 applied non-local elastic theory to study the stability and steady-state resonance of transverse vibration of nanobeams, and drew a conclusion that nonlocal nano-size has a significant influence on the vibration behavior by considering the axial force. When the axial force varies with time, Ghayesh and Farokhi14,15 found that the instability of nonlinear vibration of nanometer beam can be changed. Through theoretical analysis and numerical simulation, Younis and Nayfeh 16 studied the nonlinear vibration response of micron beams under electrostatic excitation. Arani et al. concluded that increasing the axial force can improve the resonance frequency of the system, and DC electrostatic load mainly affects the bending direction of the frequency response curve. 17
Piezoelectric structures have been widely used in the field of vibration control because of their characteristics of both sensors and actuators. An active piezoelectric controller was used to suspend the vibration of a cantilever beam.18,19 The active vibration control of a composite plate using discrete piezoelectric patches has been investigated.20,21 One of challenging issues in structural dynamics is to accurately and rapidly control the vibration levels. 22 Acoustic black holes, as a new type of passive structure for vibration damping enhancement and noise attenuation, have been drawing increasing attentions of many researchers. 23 Piezoelectric control is a common control method in linear and nonlinear vibration. However, in the field of nano-beam pull-in control, piezoelectric control strategy is rarely used.
The research on the analysis and control of electrostatic pull-in for microelectromechanical system has attracted many researchers’ attention. The exact critical pull-in voltage of the two coupled elastically restrained beams with size effect was presented for a novel model of the coupled beam-type electrodes with elastic roots. 24 Ebrahimi and Hosseini dealt with the study of the temperature effect on the nonlinear vibration behavior of nanoplate-based nano electromechanical systems subjected to hydrostatic and electrostatic actuations. 25 The small-scale effect on the pull-in instability and frequency of graphene sheets subjected to electrostatic and van der Waals forces was studied. 26 Effects of surface energy on the pull-in instability and free vibration of electrostatically actuated micro/nanoscale plates were analyzed based on the modified couple stress theory. 27 Pull-in instability of the electrostatic microstructures was a common undesirable phenomenon which implies the loss of reliability of microelectromechanical systems. 28 Pull-in instability and free vibration of cantilever and clamped-clamped beam-type nanoactuators, which are made of functionally graded materials, were investigated using the modified strain gradient theory under the influence of electrostatic and intermolecular forces. 29
In this article, the dynamic response of the nanobeam vibration system is studied with a certain axial force. The main purpose of this article is to control the pull-in and nonlinear vibration of nanobeam with time delay. The influence of the axial force on the natural frequency of the system is discussed. The critical electrostatic excitation parameters changed with pull-in parameters are studied and the critical pull-in voltage value of electrostatic excitation is given. The first-order approximate solution of nonlinear equation is gotten by using the method of multi-scale. The control effect of closed piezoelectric control loop formed by piezoelectric controller on the nonlinear vibration of the system is analyzed. The amplitude–frequency and phase frequency response equation of nonlinear vibration system are given for the primary resonance of the nanobeam.
Nonlinear dynamic for time-delay pull-in control
The differential equation describing the electrostatically actuated nanobeam clamped at its both ends under the control of a piezoelectric closed-loop circuit with certain axial force FN is written as30–36 (see Figure 1)


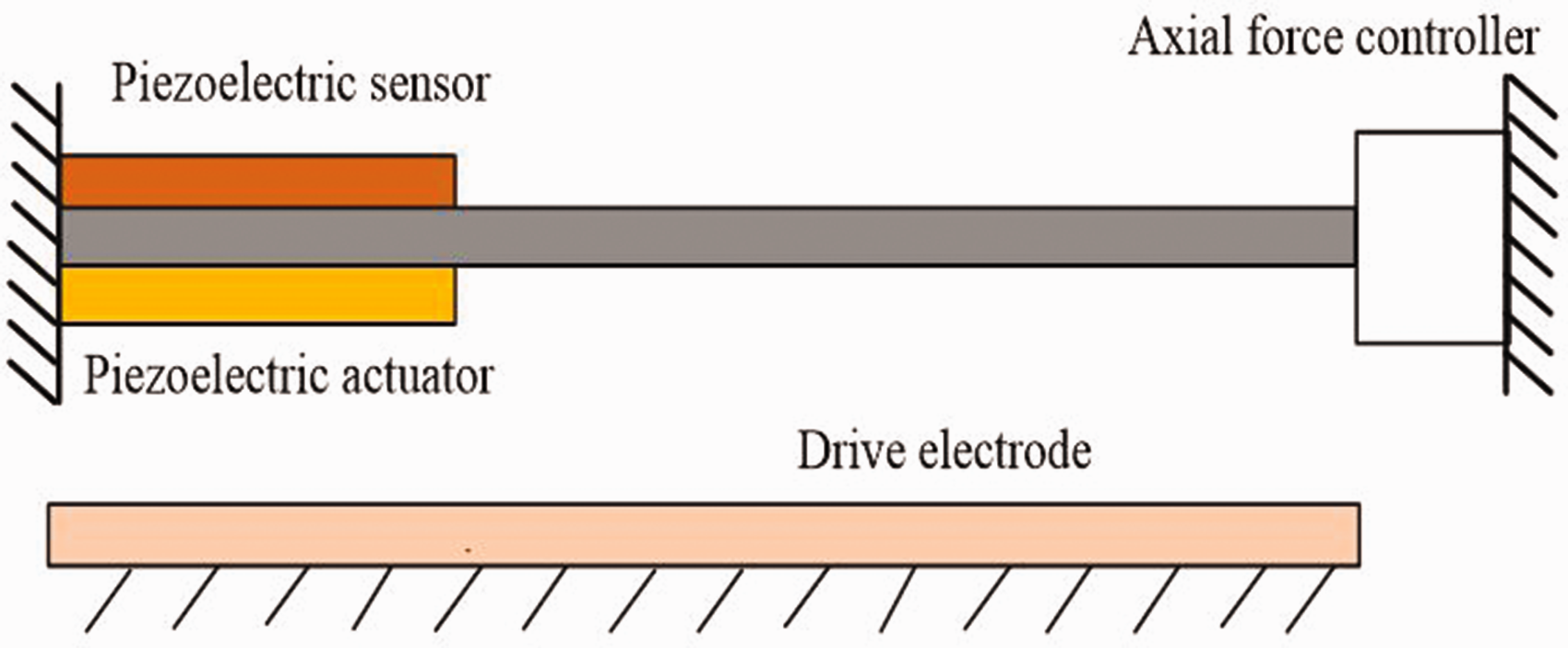
Nonlinear vibration model of nanobeam.
Substituting M, electrostatic force and dimensionless quantity, such as

The solution to the vibration (equation (2)) can be written as

To simplify the analysis, we only study first-order pull-in model and ignore the edge effect of the electrostatic driver in the following analysis. The control differential equation of nanobeam can be written as

As for a clamped-clamped nanobeam, the pull-in position of the nanobeam and the plate is always in the middle of the beam. Expressing the solution of equation (5)

Ignoring the system damping and transforming the kinetic equation into the spatial state equation, it can be written as

The equilibrium point of the system is as follows

The second equation in the above formula is equivalent to

As the stability condition of the dynamic system balance is

Without considering the nonlinear force, namely β is equal to 0 in equation (10), the pull-in critical conditions considered the electrostatic force can be written as follows

Substituting equation (11) into equation (8), the critical pull-in position can be calculated as follows

The results of equation (12) for critical pull-in position are similar with Lin and Zhao’s study. 37 From equations (6) and (12), we can find that the pull-in position of system near the equilibrium point does not change with the change of the piezoelectric control parameter and axial forces. However, the critical electrostatic excitation parameters increase with pull-in parameters. The critical pull-in voltage value of electrostatic excitation can be increased by changing the value of the critical pull-in parameter. The hardening effect of the nanobeam can be obtained by increasing the axial force.
Nonlinear dynamic for time delayed vibration control
The electric-force term can be expanded in a Taylor series around u = 0.
38
The nonlinear terms of equation (3),

The primary resonance of the nanobeam is studied under a certain axial force, which the external excitation frequency is approximately equal to the natural frequency of the system. The primary resonant piezoelectric control equation of the nanobeam, without considering the higher order term of the first harmonic part, can be written as39–41

Using the method of multiple scales, the approximate solution of equation (14) can be expressed as

By substituting equation (15) into equation (14), comparing the coefficients of same power of ε at both sides of the equation, and letting the coefficients of ε zero, equation (14) can be written as


The approximate solution of equation (17) is expressed as


Substituting equations (18) and (19) into equation (17), the equation in which the permanent term is eliminated can be obtained as below


Substituting equation (21) into equation (20) and separating the real and the imaginary parts, the differential equations in which the amplitude ak and phase angle γk of an approximate solution satisfying the polar coordinate can be written as


In order to determine the amplitude ak and phase angle γk of steady solutions when the nanobeam is in steady motion, assume D1ak = D1γk = 0. The algebraic equations which satisfies with amplitude and phase angle can be written as


By eliminating γk from the sum of the square of equation. (24) and (25), the amplitude–frequency response equation and the phase-frequency response equation at the primary resonance of the system are


According to equation (26), the amplitude–frequency response of the nanobeam vibration system and the vibration stability of the nanobeam can be affected by the parameters of excitation voltage, damping, feedback gains.
Setting

Taking the derivative of equation (28), and setting

Substituting equation (29) into equation (26) and assuming

The maximum amplitude of the main resonance is

Numerical analysis and discussion
Taking the first-order vibration mode of nanobeam as an example, the discussion of the nonlinear vibration of nanobeam is carried out. This article deals with the axial force of the electrostatic excited nanobeam vibration system. Under piezoelectric control, the effects of control parameters and system parameters on the pull-in control of nonlinear vibration, stability, and amplitude of silicon nanobeam are discussed. The length, width, and height of the silicon–sodium nanobeam are 30 µm, 500 nm, and 300 nm, respectively. The distance between nanobeams and plates is 500 nm.
Pull-in control with time delayed control
According to Figure 2, it is obvious that the critical pull-in point near the equilibrium point of system shifts to the right with the increase of piezoelectric control gain, while the pull-in critical position does not change. The critical electrostatic excitation parameters increase with pull-in parameters. The critical pull-in voltage value of electrostatic excitation can be increased by changing the value of the critical pull-in parameter. The pull-in position of system near the equilibrium point does not change with control parameter and axial forces. The axial force can change the hardening of the nanobeam.
Amplitude of nanobeam varying with excitation voltage parameters under the piezoelectric control.
The influence of axial force on nanobeam vibration
Figure 3 shows the piezoelectric control parameters changing with different axial force. With the increase of axial force, piezoelectric control parameters increase along with the linear increases of the axial force. The critical pull-in voltage value of electrostatic excitation can be increased with the increase of axial force FN, which indicates that axial force has a hardening effect on the system. The hardening effect of the nanobeam can be got by increasing the axial force.
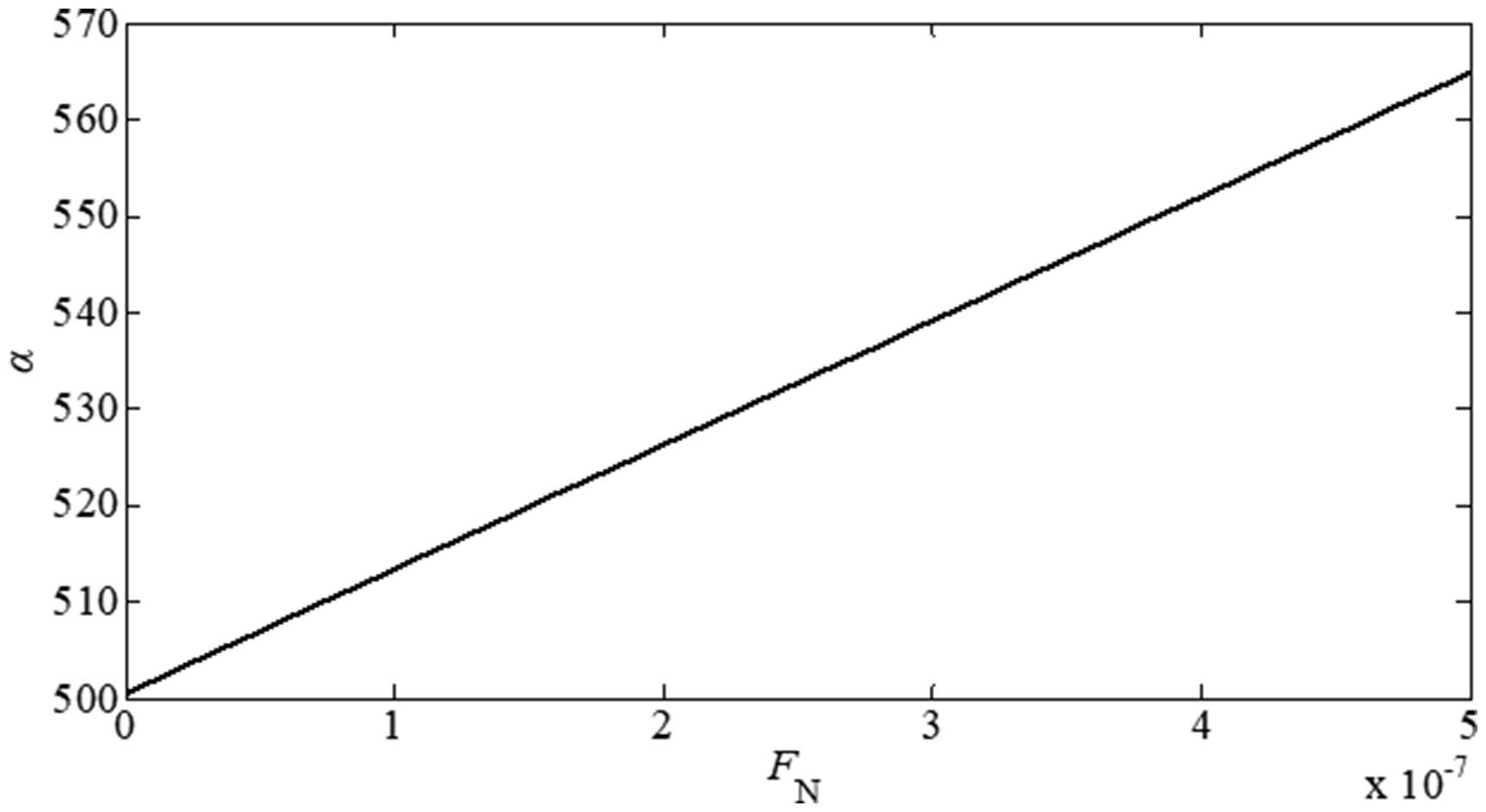
Piezoelectric control parameters changing with axial force.
Figure 4 shows the variation curves of piezoelectric control parameters and piezoelectric control gain with different time delays. When the time delay is constant, the piezoelectric control parameters increase linearly with the increase of piezoelectric control gain. When the piezoelectric control gain is constant, the piezoelectric control parameter will decrease as the time delay increases in the range of 0–π/2.
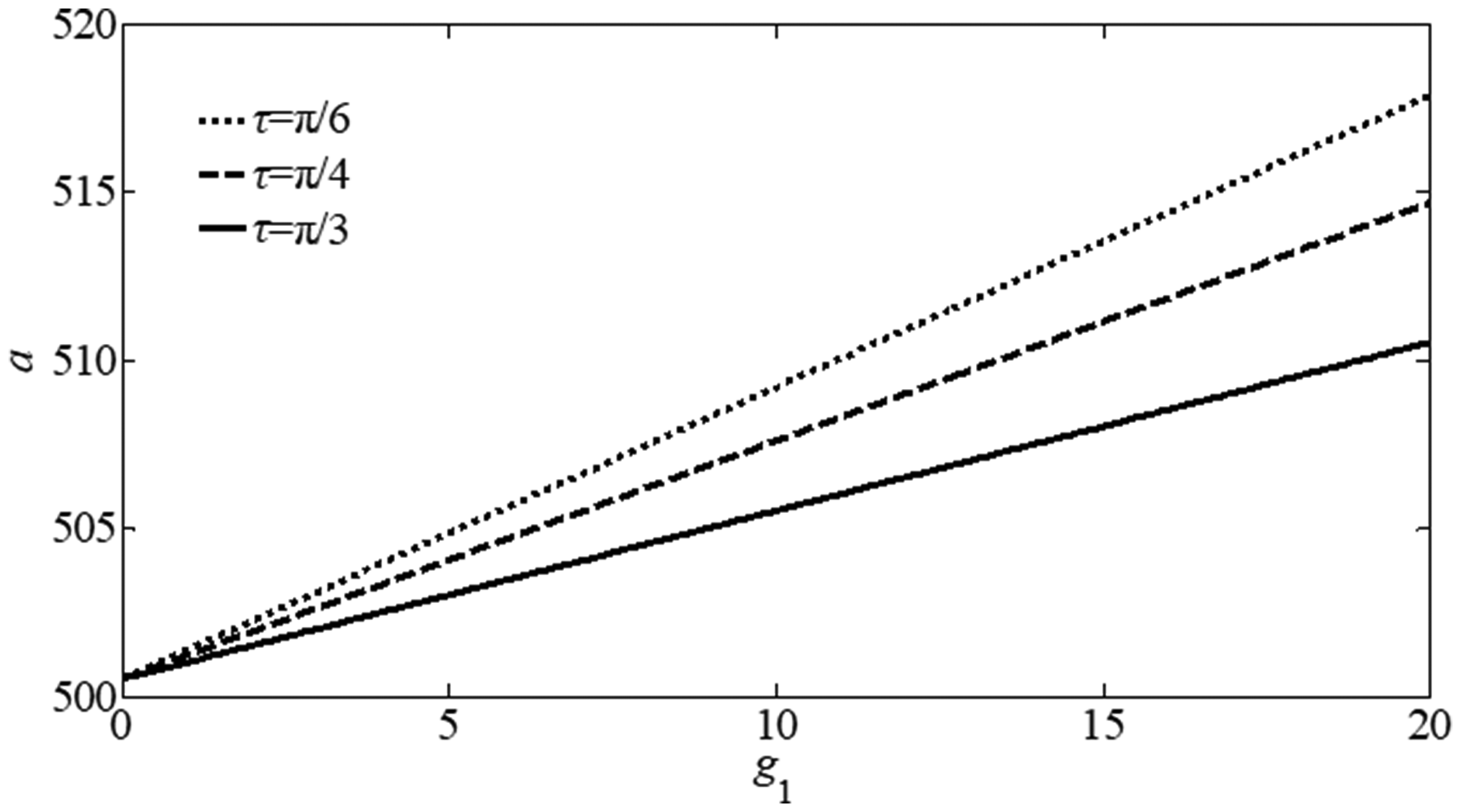
Piezoelectric control parameters changing with the feedback gains.
Nonlinear vibration control
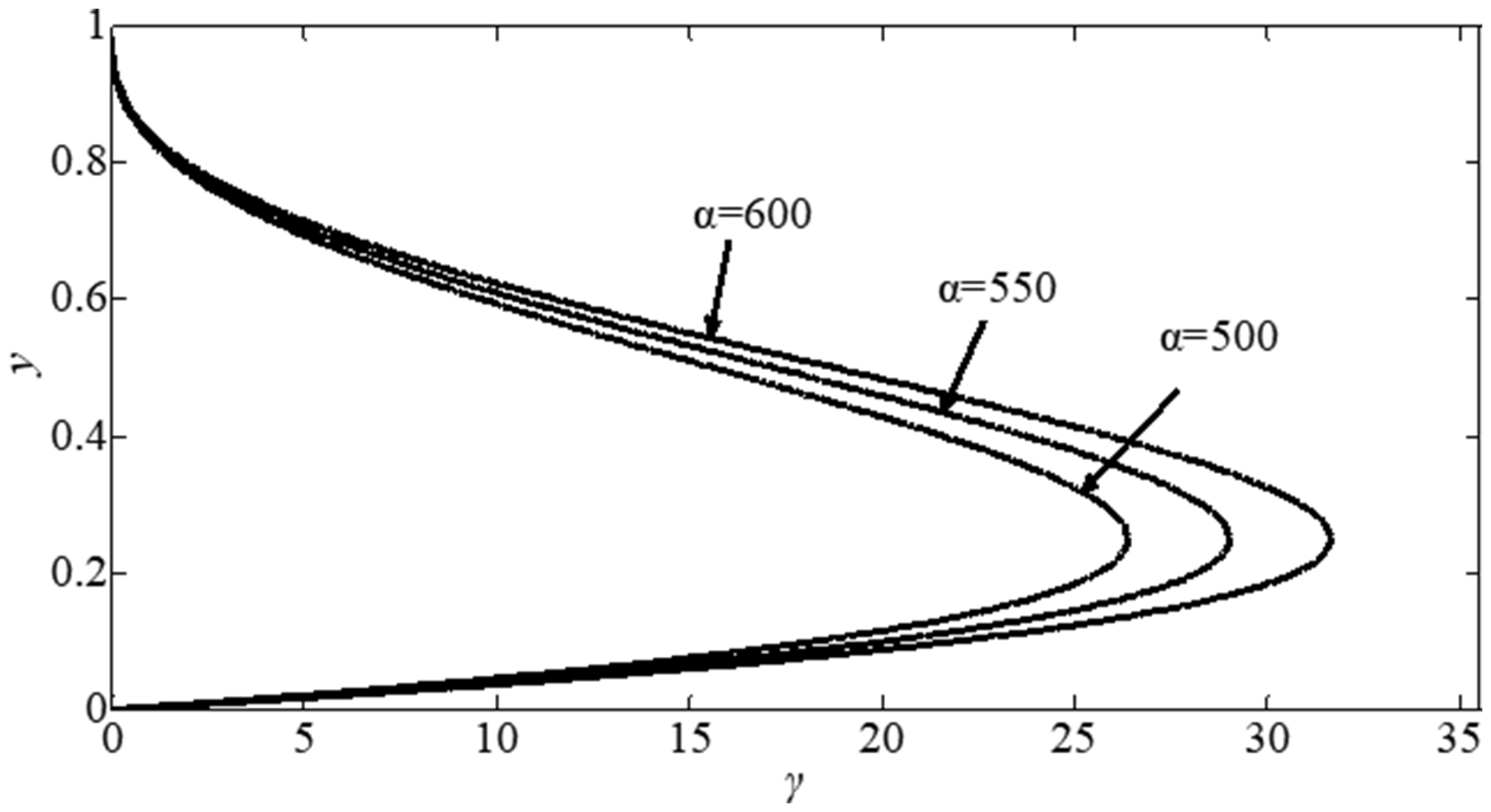
Figure 5 shows the response curve of amplitude–frequency characteristics with different axial forces. The resonant frequency of the amplitude–frequency response curve moves to the right as the axial force increases. It can be seen that the axial force can change the natural frequency of the vibration system, causing the resonant region change with the axial force.
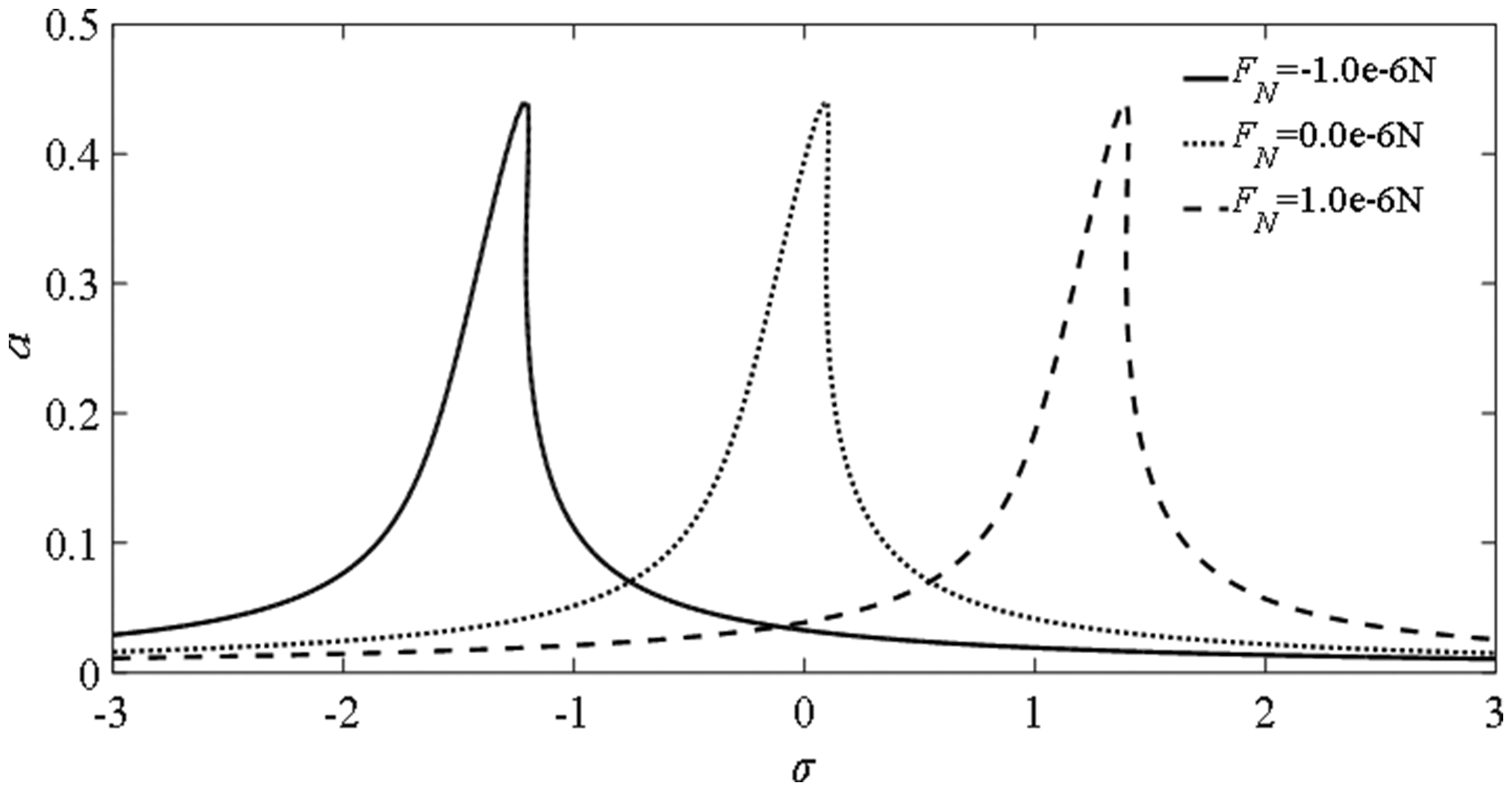
Amplitude–frequency curves for different axial force of primary resonance.
From Figure 6, when the DC excitation voltage is 2.0 V, the vibration response of the nanobeam is stable. While the DC excitation voltages are 3.0 and 4.0 V, the amplitude–frequency characteristic curves of the vibration of the nanobeam are unstable. It can be found that with the increase of the DC excitation voltage, the vibration of the nanobeam tends to be unstable from stable state and a multi-value interval appears. The vibration response is obviously nonlinear. Additionally, the amplitude–frequency characteristic response curve bends to the right, which means that the DC excitation voltage has a softening effect on the nonlinear vibration system of the nanobeam.
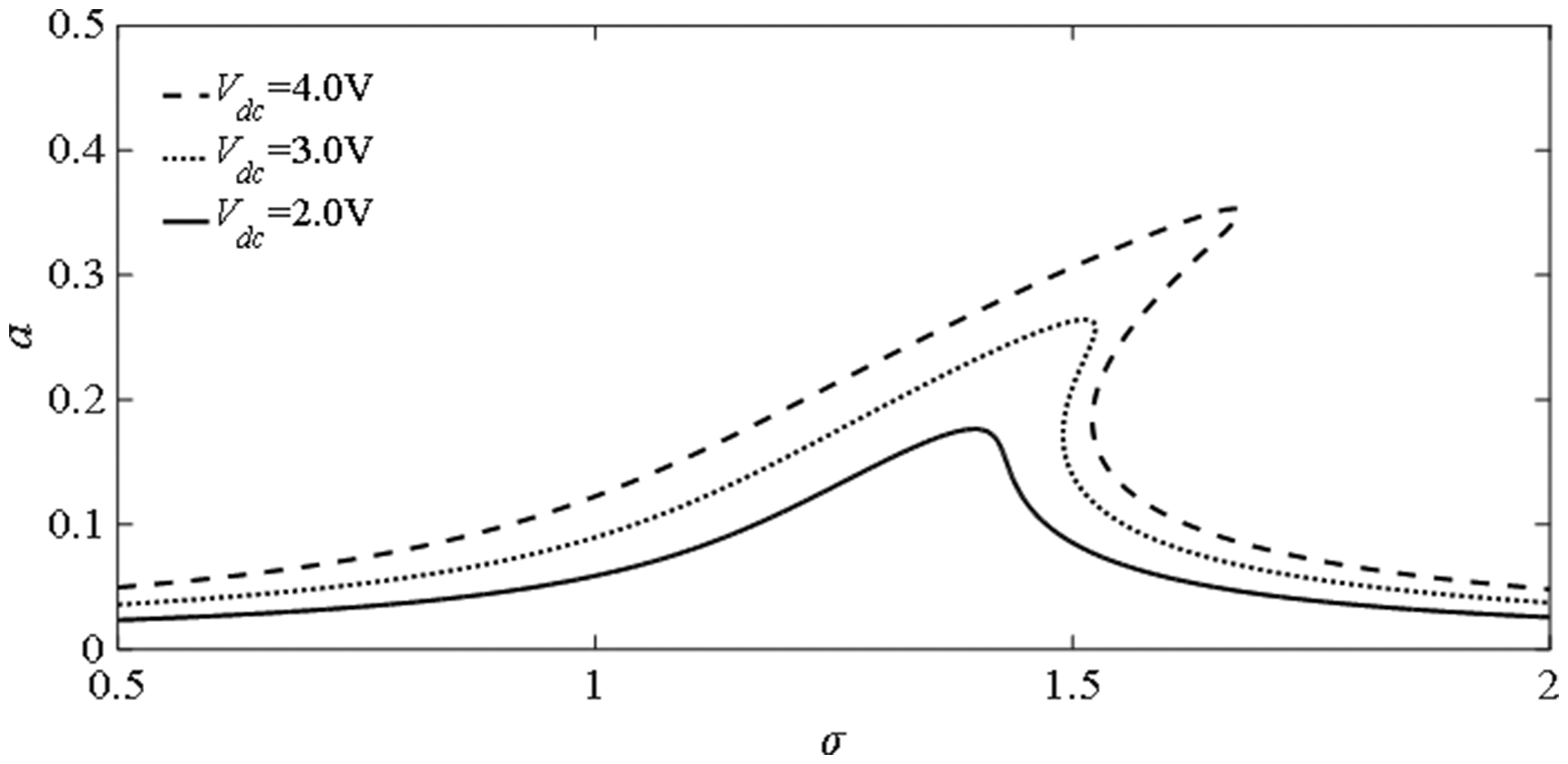
Amplitude–frequency curves for different DC excitation voltage.
As the DC excitation voltage is different from damping, the maximum amplitude varies with the length of the nanobeam as shown in Figure 7. When the excitation voltage and damping are constant, the maximum amplitude increases with the length of the nanobeam. When the length of the nanobeam is constant, the maximum amplitude decreases with the increase of damping, and shows the opposite influence law for DC excitation voltage. The conclusions drawn from Figure 8 are the same as those from the amplitude–frequency response curves.
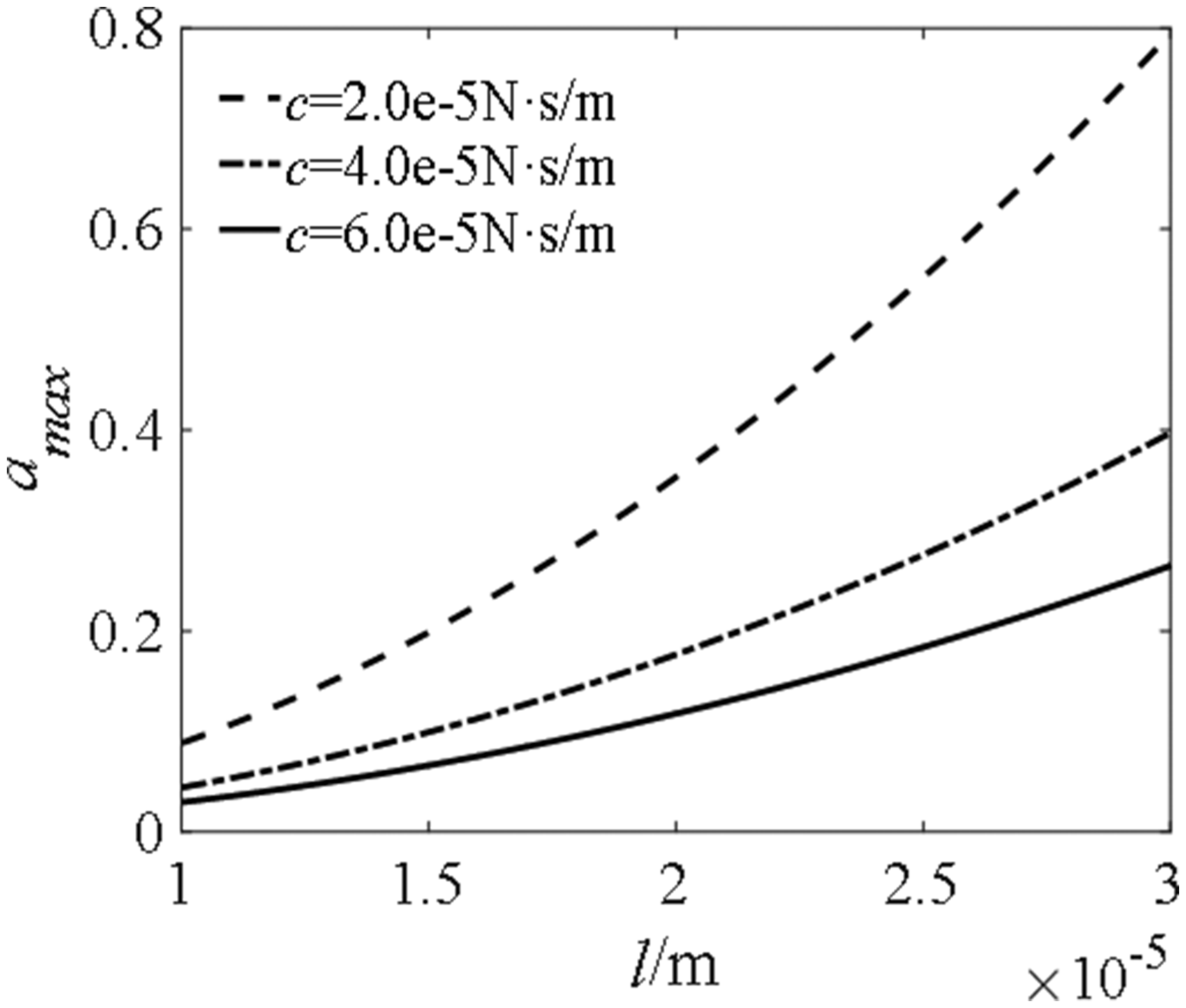
Curves for the amplitude change with nanobeam length for different damping ratio.
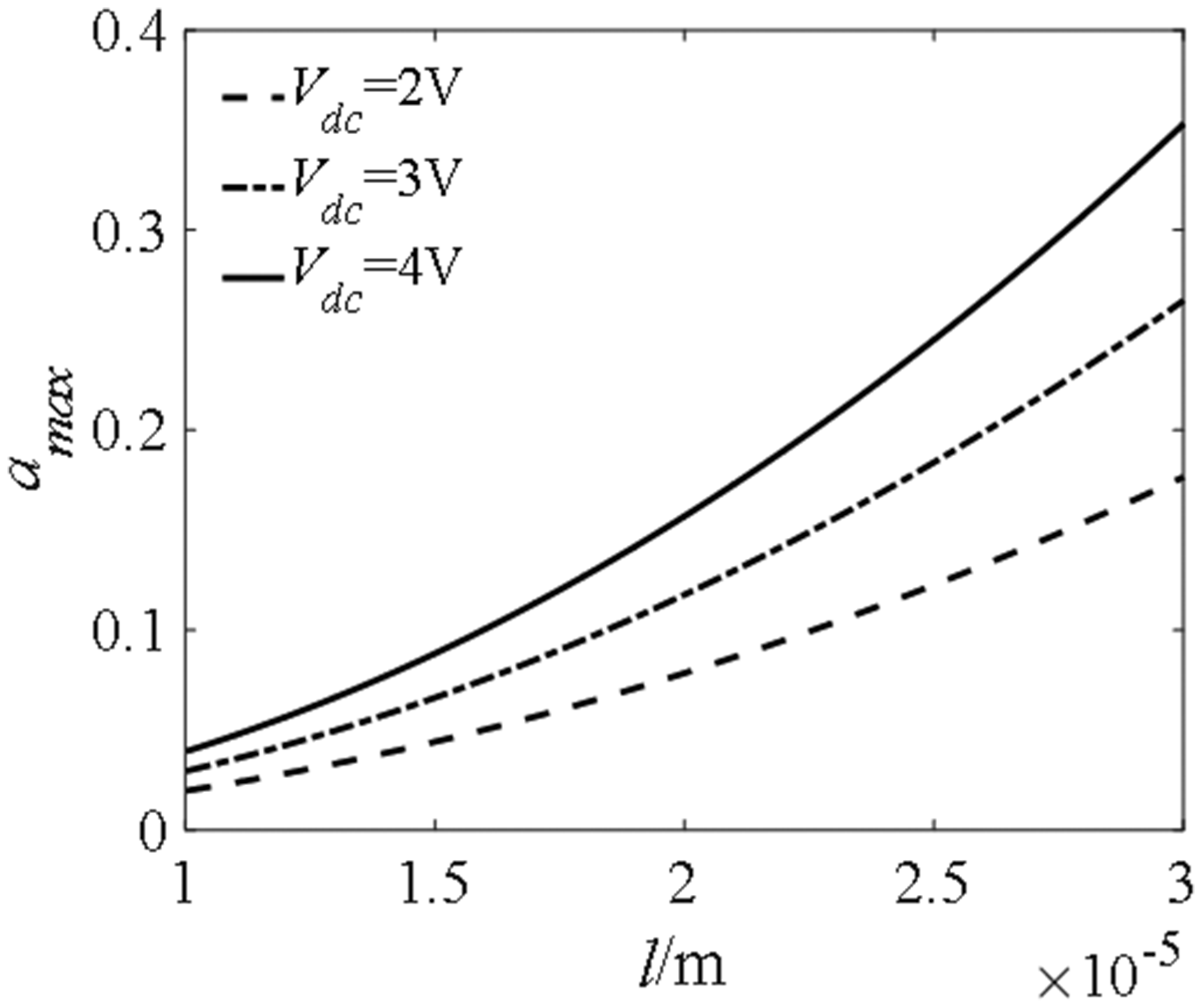
Curves for the amplitude change with nanobeam length for different DC excitations.
Figure 9 shows the primary resonant amplitude–frequency curves of the nanobeam with different linear control gains in the case of time delay is τ = π/6 and nonlinear control gain k2 = 160. As can be seen from the figure, the nonlinear main resonance frequency and amplitude of the nano-resonator decrease with the increase of control gain. When the linear gain k1 = 0 and k1 = 2, the multi-value phenomenon will appear in the amplitude–frequency figure. While the linear gain k1 = 4, the nonlinear vibration is changed into linear vibration.
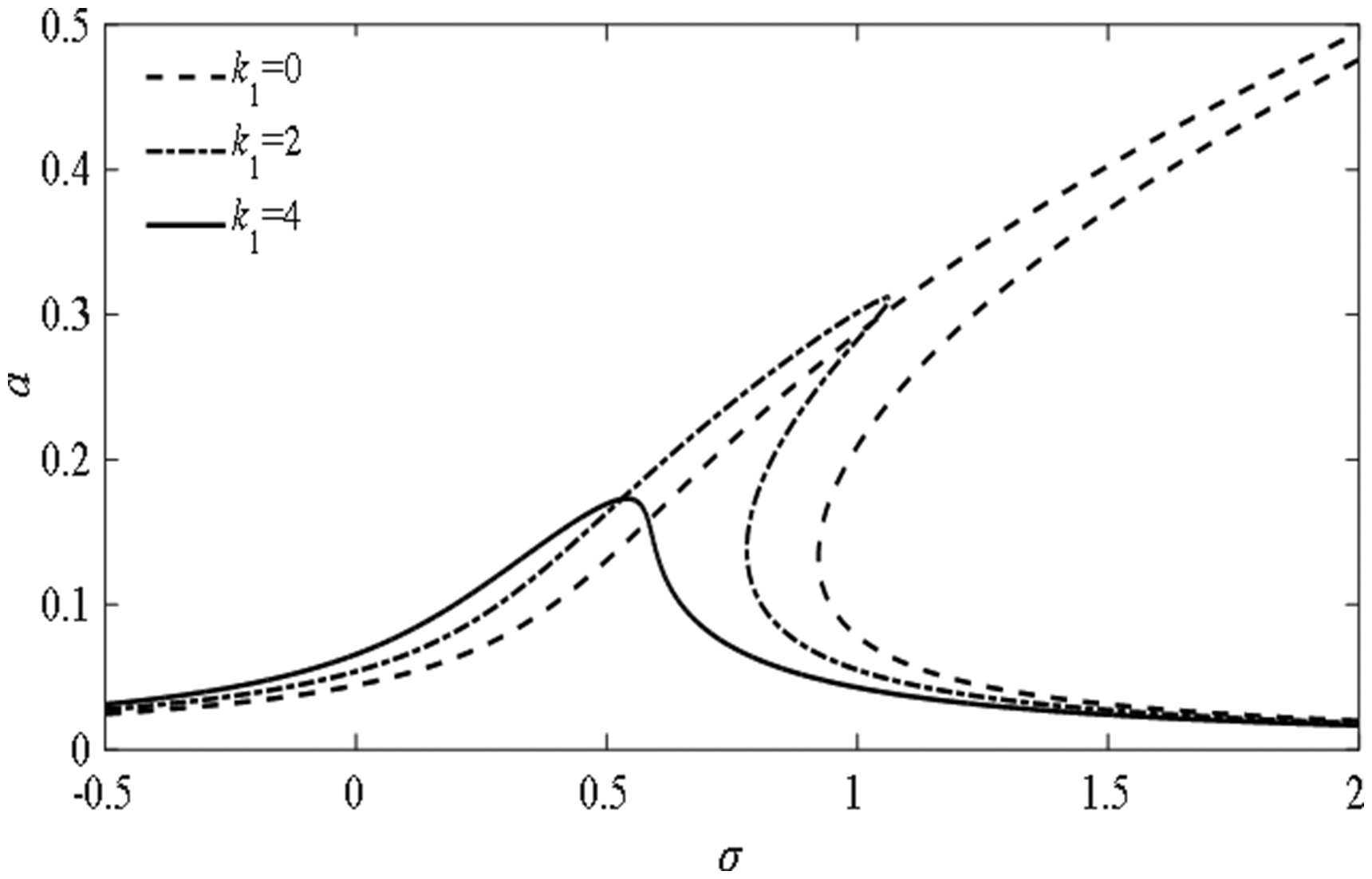
Primary resonant amplitude–frequency of nanobeam with different linear control gains.
Figure 10 shows the primary resonant amplitude–frequency curves of nanobeams with different time delays. When the time delayed k1 = 2, the nonlinear control gain k2 = 160. It can be seen from the figure that with the increase of the time delay, the nonlinear primary resonant frequency and amplitude of the nano-resonator will decrease. When the time delayed τ = 0 and τ = π/6, the multi-value phenomenon is seen in the amplitude–frequency image. When the time delayed τ = π/3, the nonlinear vibration is changed into linear vibration. The linear control gain and time delay both affect the nonlinear vibration of the nanobeam. The nonlinear vibration shape of the structure can be changed by changing the nonlinear gain, which can change the structural parameters, reduce or even eliminate the nonlinear effect.
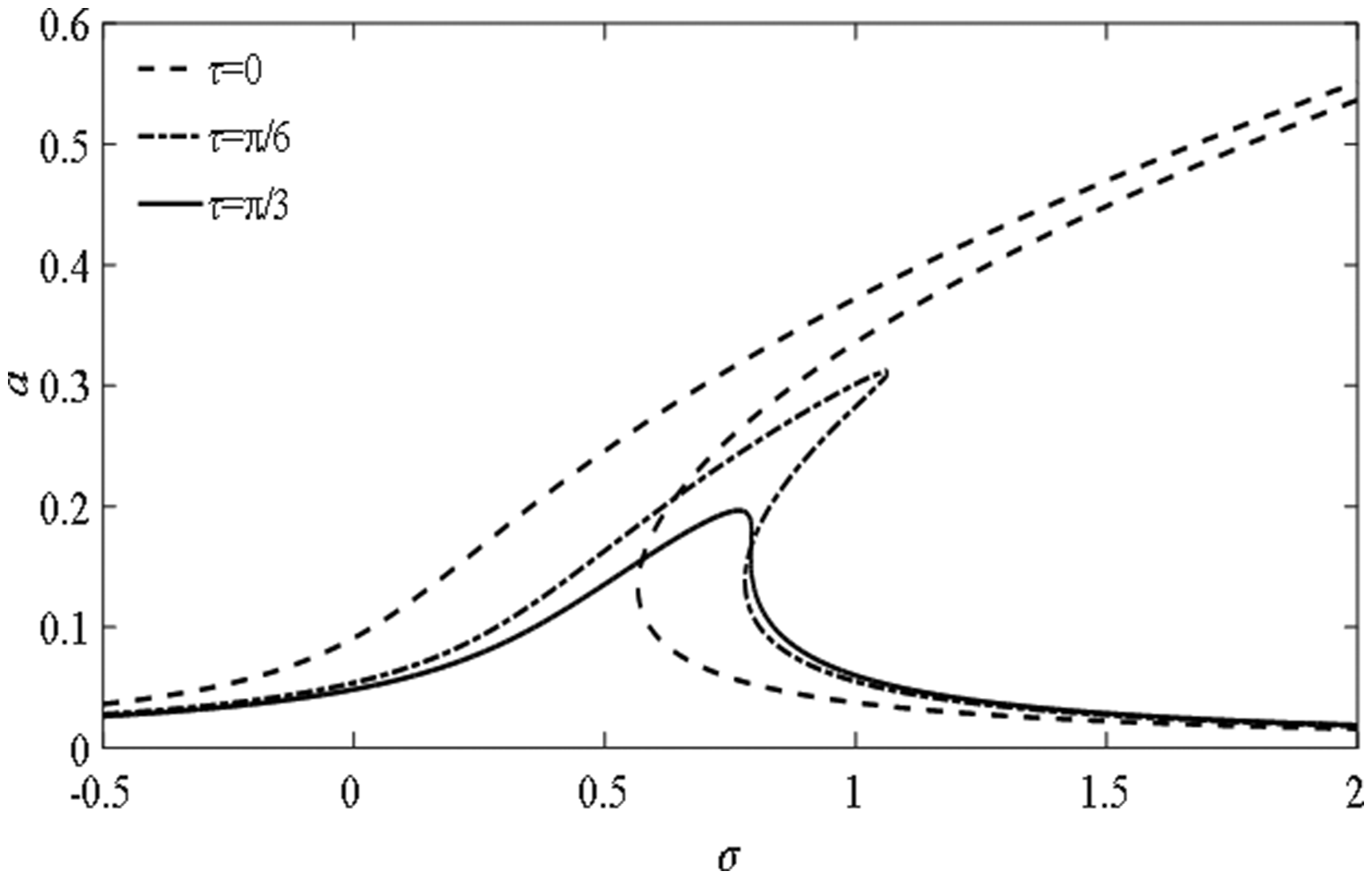
Primary resonant amplitude–frequency of nanobeam with different time delays.
Figure 11 depicts the amplitude–frequency characteristic response curve when the feedback gain is different. The feedback gain parameter k2 almost has no effect on the maximum amplitude. When the frequency is far from the resonance region, the feedback gain parameter has little effect on the amplitude. When feedback control parameters are 160 and 165, the curves deviate to the right due to the geometric nonlinear term. When the excitation frequency increases, the amplitude is not strictly in accordance with the curve, and instead, the jump phenomenon appears, which means that the system vibration is unstable. When the feedback control parameter is increased to 170, the nanobeam takes on linear vibration. Therefore, the feedback gain can change the vibration characteristics of the nanobeam by changing the value of the nonlinear term.
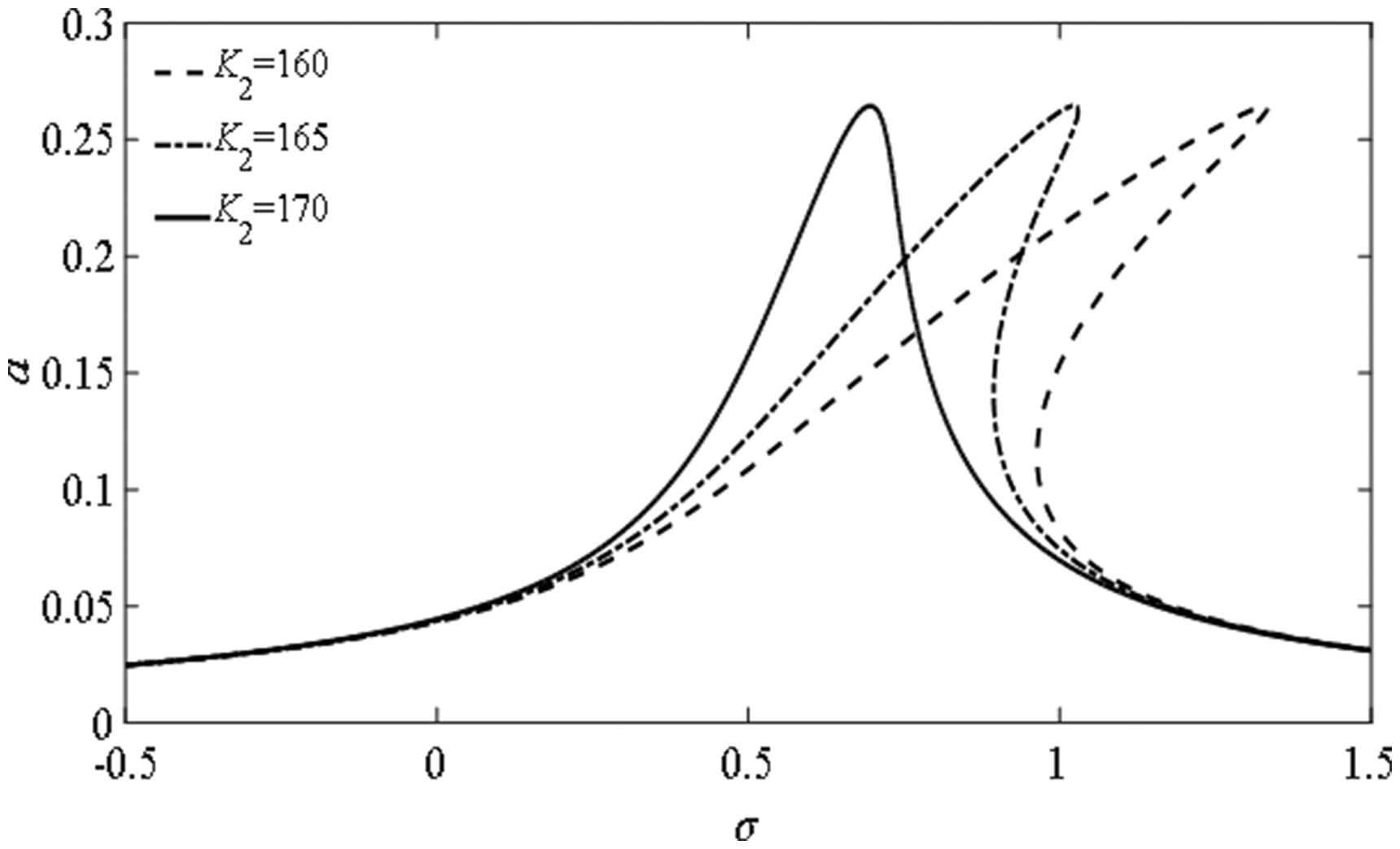
Primary resonant amplitude–frequency of nanobeam with different nonlinear control gains.
Figure 12 depicts the amplitude–frequency characteristic response curve when the feedback gain is different. It can be seen from Figure 12 that the feedback gain k2 almost has no effect on the maximum amplitude. When the frequency is far from the resonance region, the feedback gain has a little effect on the amplitude. When feedback control parameters are 160 and 180, the maximum amplitude point is not obtained at the resonant frequency point, but is deviated to the right or the left, due to the geometric nonlinear term. When the excitation frequency continues to be increased, the amplitude is not strictly in accordance with the increase of the curve, in fact, the jump phenomenon occurs because of unstable system vibration. When the feedback control parameter is increased to 170, the nanobeam shows linear vibration. The nonlinear control gain will affect the nonlinear vibration of the nanobeam. By changing the gain and the delay, the nonlinear vibration shape of the structure can be changed, and the structural parameters can also be changed to reduce and even eliminate the nonlinear influence on the structure, which means the reduction in vibration of nonlinear structures can be realized. As a result, the nonlinear vibration will be shown as linear vibration.
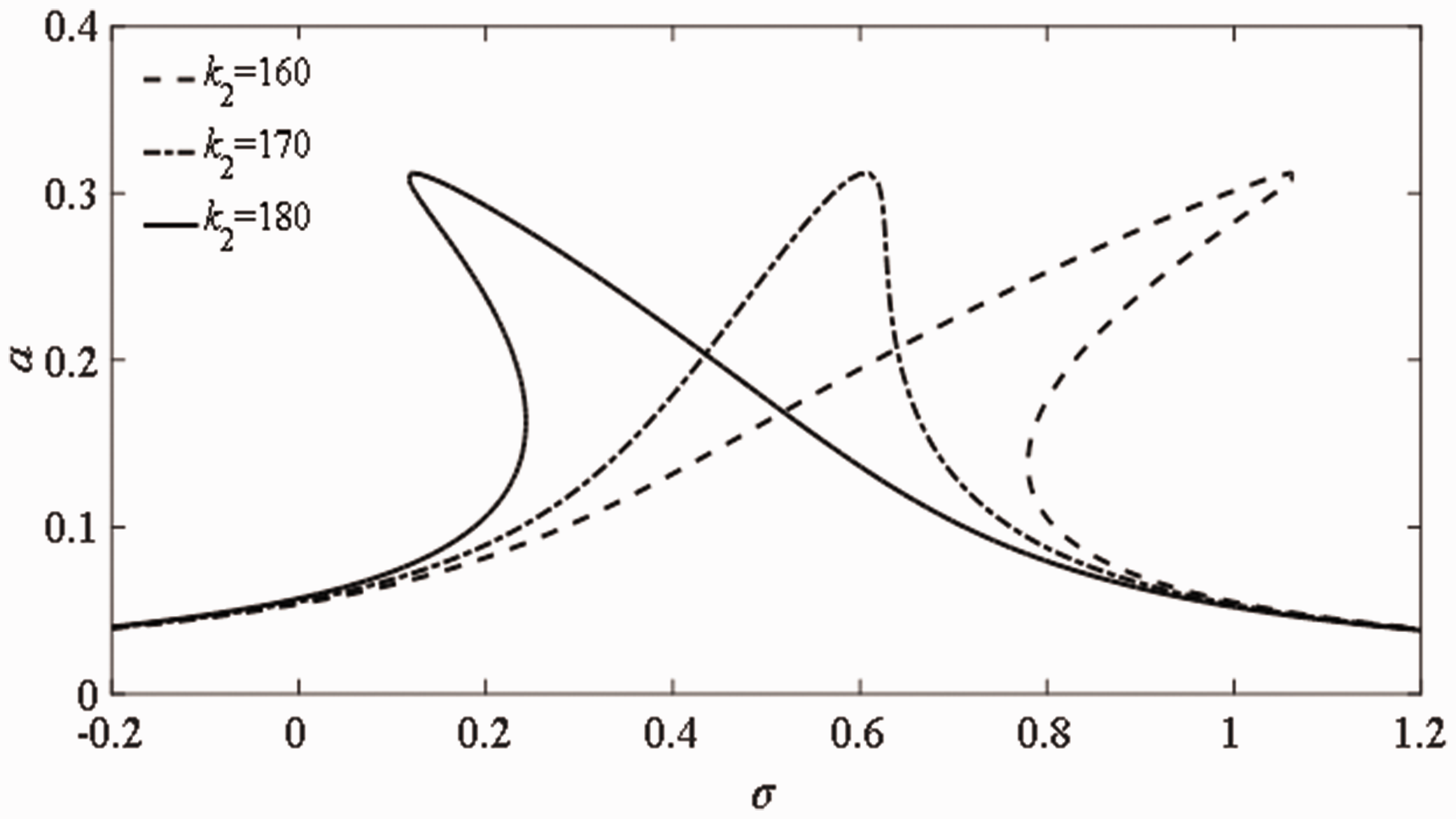
Main resonant amplitude–frequency images of nanobeams with different linear control gains.
From the analysis on the above response equations and figures, it is found that nonlinear vibration of nanobeams can be controlled by the feedback gain parameter in the way of changing nonlinear terms’ values. The feedback control gain and time delay produce a time-delay damping term by changing the phase of the control item, which can control the amplitude of nonlinear vibration. The feedback control gain and time delay can change the elastic term and the value of nonlinear principal resonance point. The feedback control gain and time-delay terms can also change the value of the nonlinear term to enhance or weaken the nonlinear term. Therefore, the steady state vibration of the nanobeam can be realized by selecting the appropriate feedback gain parameter value.
Conclusions
The Euler–Bernoulli beam with fixed ends is taken as the model. The control condition of the pull-in is obtained by analyzing the extreme value of the vibration equilibrium point of the nanometer beam. The effects of axial force on structural vibration, control gain, and time delay on nonlinear vibration are studied by response curve of amplitude–frequency. The conclusions can be drawn as: The pull-in condition of the nanobeam can be changed by changing the control parameters, but the position of the pull-in cannot be changed. The amplitude–frequency response curve with the same axial force is axial symmetric. When axial force is less than zero, the inherent frequency of the system will reduce. When axial force is larger than zero, the natural frequency of the system will increase. The natural frequency increases with the increase of axial force and the axial force has a hardening effect on the system. The reduction in vibration of nonlinear structures can be controlled on the basis of the effect of the linear control gain and time delayed on the nonlinear vibration of nanobeams. By analyzing the amplitude–frequency characteristic response curve, the damping, excitation voltage and the feedback gain play the main control role in the nonlinear vibration of the nanobeam. Choosing the appropriate damping value and the feedback gain The nonlinear feedback gain can change the value of the nonlinear term to realize the control of the nonlinear vibration of the nanobeam. Therefore, by selecting the appropriate feedback gain value, the steady state vibration of the nanobeam can be realized. Increasing the damping value, reducing the excitation voltage or increasing the feedback gain can weak the nonlinear characteristic of the nanobeam. The maximum amplitude decreases with the increase of the damping value and the axial force, while it increases with the rise in the excitation voltage amplitude. The effect of the feedback gain on the maximum amplitude is smaller than that of the other parameters mentioned above. The peak amplitude varies with the length of the nanobeam, damping, and amplitude of excitation voltage.
value can noticeably weaken the nonlinear characteristic of the system vibration.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is supported by the Shandong key research and development projects (Grant No. 2019GGX104066).