
Abstract
Electrochemical machining is a non-conventional machining technique used across a large range of industries from aero to medical. A large number of papers exist on the topic of electrochemical machining and electrochemical micromachining which is a daunting task to evaluate for anyone new to the subject. This article aims to summarise some of the major parameters used in electrochemical machining which affect machining accuracy, machining rate and the suitability of the process for micromachining. This article does not propose to be in any way complete but a starting point for anyone new to the subject of electrochemical machining. This article aims to find new areas to study within the electrochemical micromachining field.
Keywords
Introduction
Micromachining has gained importance in recent years due to a drive towards miniaturisation which has focussed research into many micromachining techniques. Conventional machining techniques, such as drilling and milling, are unsuitable for many micromachining applications due to the stresses imparted on the workpieces.
Non-conventional machining techniques such as electro-discharge machining (EDM), laser beam machining (LBM), electron beam machining (EBM), ultrasonic machining (USM) and electrochemical machining (ECM) have been utilised in micro-manufacturing industries. However, EDM, LBM and EBM are all thermal machining processes, creating a heat-affected layer on the workpiece surface during machining which then forms micro-cracks at the surface. USM is used primarily to machine brittle materials where conventional machining would cause crack formation. ECM, however, is a heat-free and stress-free machining technique. While ECM theoretically has atomic-scale machining accuracy, it has not been used as commonly as the other methods due to the occurrence of stray erosion and inaccuracies when machining.
Much research has been conducted over the last two decades to understand and develop the ECM process on the micro-scale: from applying nanosecond potential pulses to reducing the inter-electrode gap (IEG) to using passivating electrolytes. These changes will be discussed more in detail later in this article.
ECM is a technique which utilises an electrolysis process called anodic dissolution. Anodic dissolution is the opposite reaction to electrolytic plating which is used to improve parts properties (i.e. corrosion resistance) or physical appearance (i.e. in the jewellery industry where less-expensive metals are plated with smaller amounts of precious metals).
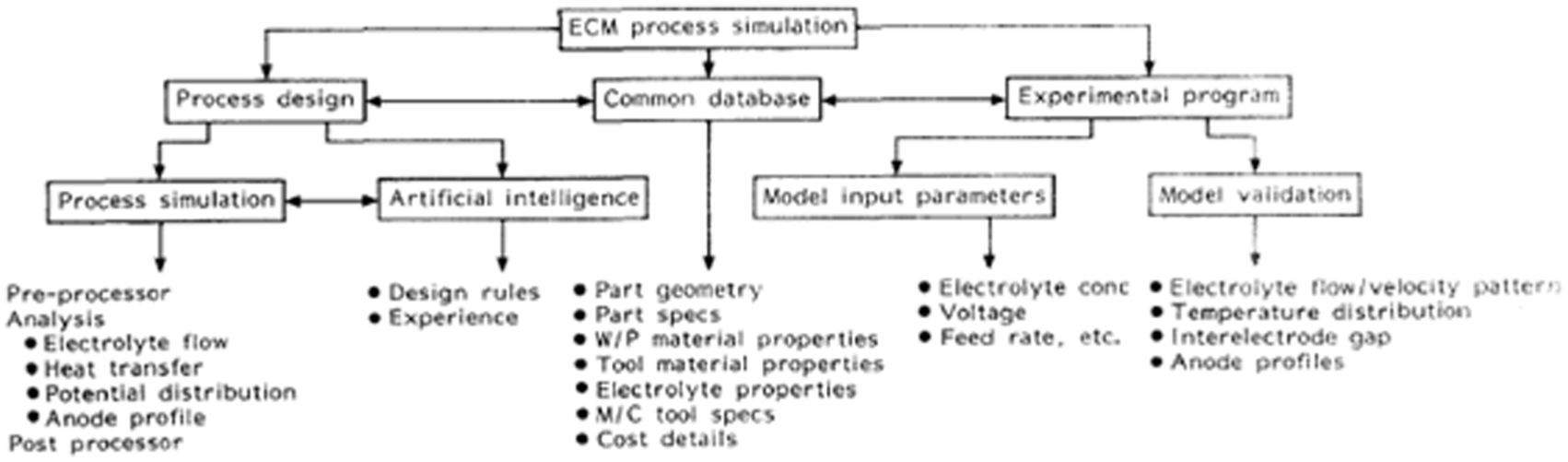
ECM has many advantages over other traditional machining techniques: any conductive material can be machined regardless of its mechanical properties, for example, hardness; it is a virtually stress-free process with virtually no tool wear; and complex shapes can also be obtained in one machining step, which would not be ordinarily reached with conventional machining techniques. This article will review research conducted in electrochemical micromachining (ECMM), and Figure 1 shows the flow diagram for the structure of this article.
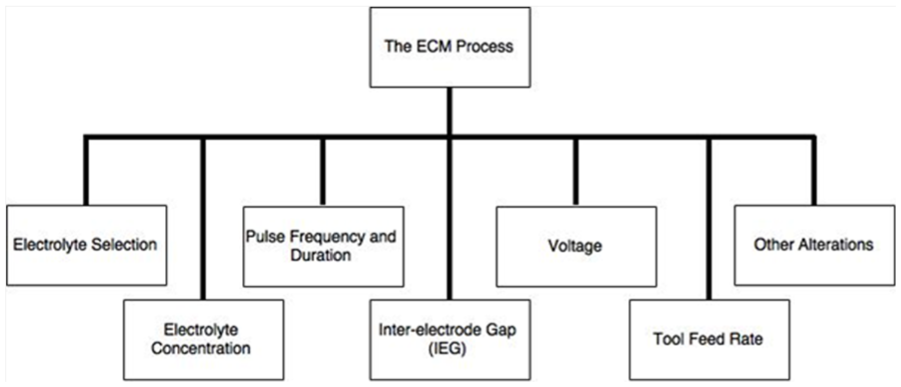
Flow diagram for structure of this article.
The ECM process
ECM is a machining technique based on electrolysis. Electrolysis uses the passage of current between two electrodes immersed in a conductive solution, called an electrolyte, to perform chemical reactions at the electrodes. Current is passed between a workpiece, which is the positively charged electrode, termed the anode, and a tool, which is the negatively charged electrode, termed the cathode. Electrons flow from the negatively charged cathode towards the positively charged anode. Electrons are carried through the electrolyte in the form of ions. Depending on the potential applied, material can either be deposited or removed from the electrodes.
Anodic dissolution removes material according to Faraday’s Law (equation (1))

where m is the mass removed (g), Q is the charge passed in C (Q = It, where I is the current and t is the time (s)), F is the Faraday constant (96,485 C mol−1), M is the molar mass of the workpiece (g mol−1) and z is the valence number (number of electrons transferred per ion) which is a dimensionless number.
The tool in ECM is advanced towards the workpiece at a constant feed rate trying to maintain a constant IEG. A steady-state gap is formed which is dependent on a number of factors; these factors will be discussed later. A negative copy of the tool is replicated in the workpiece. Either a complex tool can be designed or a simple cylindrical tool can be moved in the X-Y plane (known as writing mode) to create complex features in a way similar to computer numerical control (CNC) milling, as shown in Figure 2.
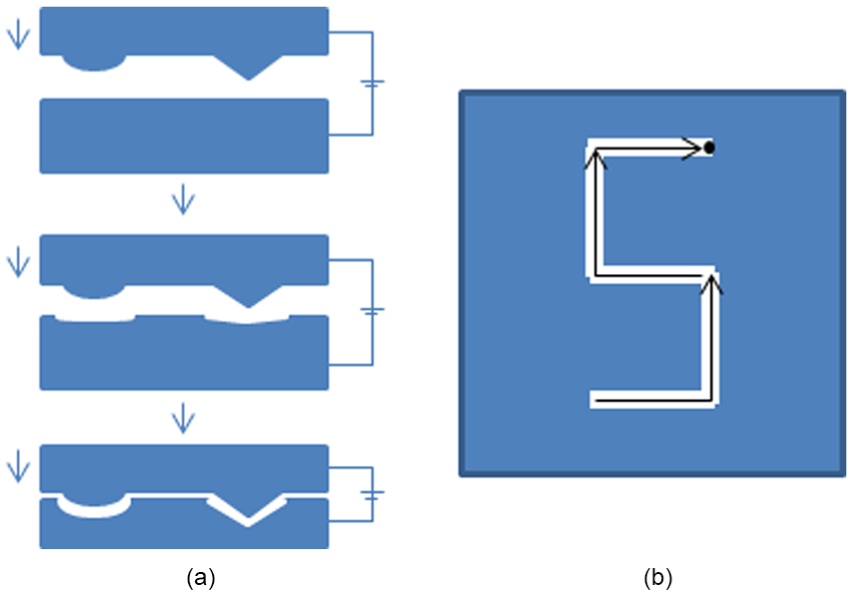
ECM process (a) with a complex tool (viewed from the side) and (b) with a simple cylindrical tool (viewed from above). The arrow shows the path of the tool, and the black dot is the tool.
Using the dissolution of iron in sodium chloride (NaCl) as an example, the anodic dissolution process will be discussed more in detail. Iron is known to actively dissolve in a simple salt solution of NaCl. Ions in the electrolyte are affected by three mechanisms: diffusion, convection and migration. 1 Diffusion is the movement of ions from a region of high concentration to low concentration. Iron ions are dissolved at the cathode surface and diffuse across a thin, stagnant layer of electrolyte at the electrode surface towards the bulk electrolyte where iron ion concentration is much lower. Convection is the movement induced by an external force; in the case of ECM, the electrolyte is forced through the IEG at high pressure and speed, which carries ions away from the IEG. Migration is the movement of ions due to a potential field, that is, positive ions are electrostatically attracted to a negatively charged cathode tool and vice versa. In this example, iron is dissolved at the anode and hydrogen gas is evolved at the cathode; the reactions are as follows

Iron is not deposited on the cathode as the iron ions react with hydroxide ions in the solution to form iron hydroxide (Fe(OH)2) which is insoluble, so precipitates to form a sludge. The solid reaction products are filtered from the electrolyte. Figure 3 shows a visual representation of the basic reactions occurring during the ECM process.
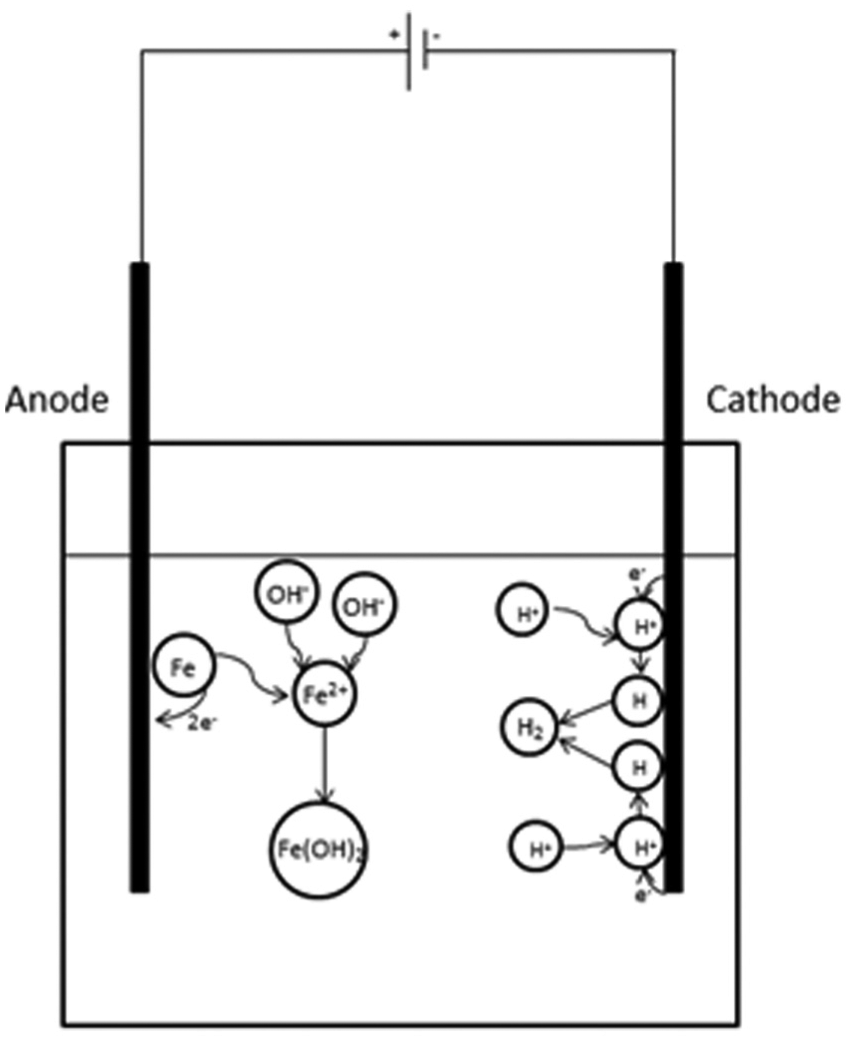
Schematic diagram of the basic reactions during ECM.
The electrolyte is flushed through the IEG to remove reaction products which may cause sparks or short circuits during machining due to increased electrical resistivity in the IEG. The electrolyte also removes heat from the reaction region caused by Joule heating. If the reaction products are not removed from the machining zone, a metal hydroxide layer could build up at the workpiece surface limiting the reaction.
ECMM
ECMM is an advanced version ECM where machining is confined to much smaller areas on the workpiece to create high-aspect ratio holes, shapes and tools on the micro-scale. There are many factors which affect machining accuracy, including electrolyte selection, electrolyte concentration, pulse frequency and duration, IEG size, and voltage and feed rate.
Electrolyte selection
The electrolyte in ECMM is a crucial parameter; it provides the conditions needed for reactions to occur. The ideal electrolyte should have high conductivity, low viscosity, be non-corrosive and inexpensive. The most common electrolytes used are sodium chloride (NaCl) and sodium nitrate (NaNO3) although many others are used.
The electrolyte chosen depends on the workpiece material and the desired result, that is, accuracy, material removal rate (MRR) or surface finish. Table 1 shows some electrolytes used for a range of metals commonly machined with ECM. 2
Common electrolytes for a range of metals. 2
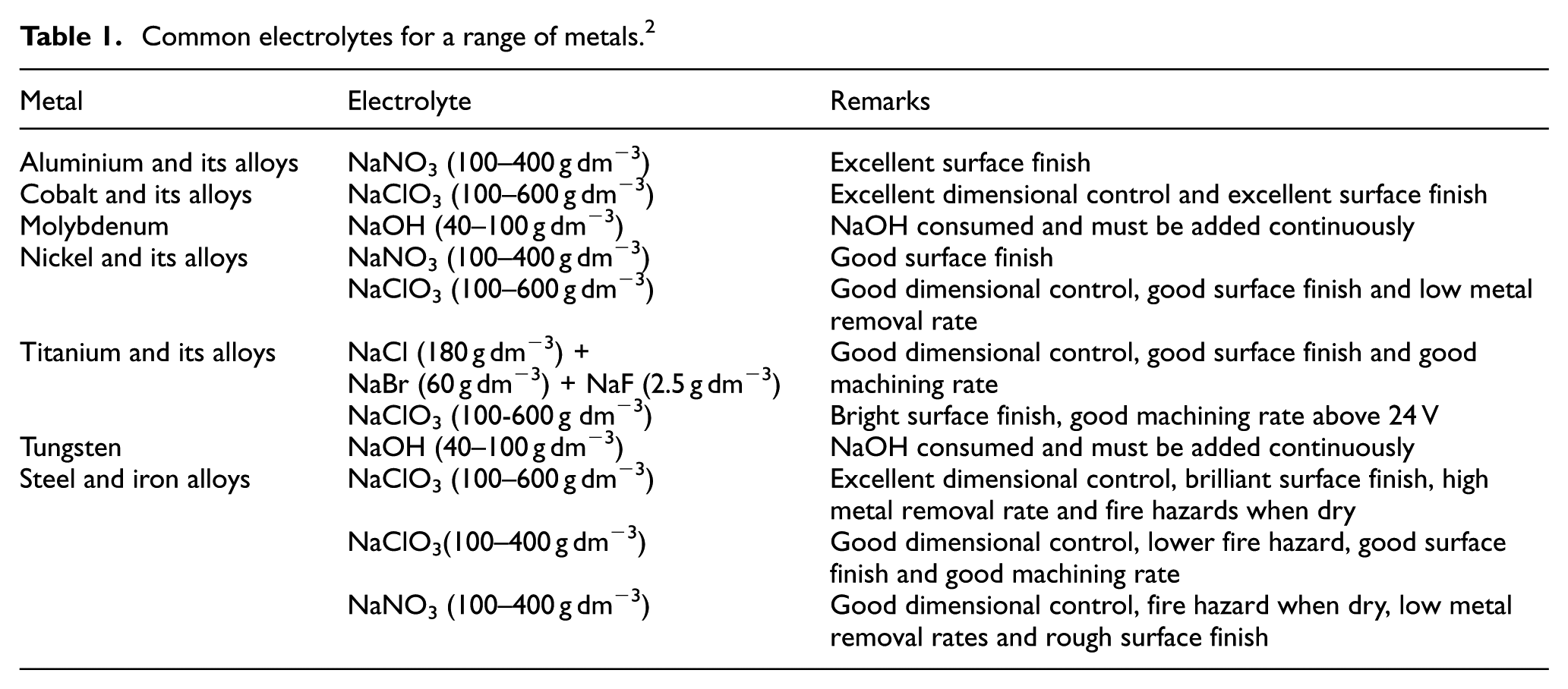
There are two main types of electrolytes: passive and non-passive. Passive electrolytes contain oxidising anions such as sodium nitrate. These provide better precision due to the formation of a protective oxide film. Oxygen is usually evolved in the stray current regions. Non-passive electrolytes contain more aggressive anions, such as sodium chloride. 3 The MRR is usually much higher with these electrolytes, but the accuracy is lower in comparison with passive electrolytes. 4
Acidic electrolytes are sometimes chosen to prevent the build-up of solid machining products which can collect in the IEG slowing machining. Tungsten carbide (WC–Co) is machined with sulphuric acid (H2SO4) as tungsten and cobalt can be machined simultaneously. 5 Some metals also show enhanced machining in basic electrolytes, for example, tungsten in sodium hydroxide (NaOH).
All of the electrolyte examples above are aqueous electrolytes. Some materials are water-sensitive, so an aqueous electrolyte is inappropriate. In these cases, non-aqueous electrolytes are used, such as glycerol-based electrolytes. The conductivities of organic-based electrolytes are generally low in comparison with aqueous electrolytes due to difficulties in dissolving salts in them. 1 This results in lower machining rates but enhances machining accuracy. High-resistivity electrolytes, such as glycerol-based electrolytes, are commonly used for electro-polishing, another variant of ECM, as the difference in current density between peaks and troughs is greater, resulting in preferential dissolution. 6
Electrolyte concentration
Electrolyte concentration also plays a role in machining accuracy and machining rates in ECMM. The concentration of the electrolyte determines its electrical conductivity: the higher the concentration, the higher the electrolyte conductivity. Many studies have been conducted researching how electrolyte concentration affects ECM and ECMM machining.3,7–24 Accuracy is highly important when machining micro-features as smaller features require smaller tolerances.
Bhattacharyya et al. 3 observed that with a lower concentration, higher voltage and a moderate value for pulse on-time, the machining accuracy was improved with a moderate MRR. Ayyappan and Sivakumar 7 observed that a higher concentration leads to higher MRRs and better surface finish in an oxygenated electrolyte of NaCl for 20MnCr5 steel where gaseous oxygen was fed into the electrolyte at differing pressure and flow rates.
Ayyappan and Sivakumar 8 also stated that a higher electrolyte concentration ‘allow for more ions for ionization’ which in turn increases MRR. Ayyappan and Sivakumar 25 also indicated that the conductivity of the electrolyte increased with increasing concentration initially but then levelled off as the concentration was increased further. Bannard 9 observed that the dissolution current was higher for higher electrolyte concentrations and the increase in kinetics is why highly concentrated electrolytes are employed in ECM. Bhattacharyya and Munda 10 presented results which showed that a lower concentration in combination with a larger machining voltage and a ‘moderate pulse on-time’ produced more accurate shapes at a moderate MRR as the stray current effect is less. Stray current occurs when the electrical conductivity of the electrolyte allows machining to reach areas of the workpiece at larger distances from the tool electrode than is desirable creating a less accurate machined shape.
Das and Saha 11 created cylindrical micro-tools with ECMM form turning where a rotating cylindrical tool was moved towards a stationary block along the x-axis and found that the reaction was non-uniform at higher electrolyte concentrations, possibly due to the difficulties in thoroughly cleaning the IEG changing the conductivity of the solution between the electrodes. This led to shorter cylindrical tools formed in higher concentration electrolytes in comparison with the cylinder length in lower concentrations. Higher concentrations (>3 M) in this study were detrimental to the surface finish due to the inefficiency cleaning and the IEG creating fluctuations in electrolyte conductivity. They predicted that an increase in electrolyte agitation could lead to an increase in tool length due to better cleaning of the IEG, eliminating conductivity fluctuations due to dissolution products in the gap. Datta 12 observed that the anion type and electrolyte concentration affected the MRR. The formation of a salt film on the anode surface may occur more readily at higher electrolyte concentrations leading to a better surface finish. This is because the saturation limit will be more easily reached at the electrode surface at higher concentrations. Datta and Landolt 13 later witnessed that the current distribution is dependent on the electrolyte concentration. This was observed during electrochemical deposition, the process analogous, yet opposite, to ECM. During electrochemical micro-drilling with a mixed electrolyte of hydrochloric acid (HCl) and sodium chloride (NaCl), Fan et al. 14 showed that the overcut increased as the sodium chloride concentration increased. Overcut occurs due to machining on the side gap between the tool and workpiece resulting in a machined feature larger than the tool used. Although above a certain NaCl concentration (3.42 M), the overcut began to decrease when in combination with 0.3 M HCl. It cannot be certain this is a trend which occurs repeatedly in ECM as this was not confirmed for the mixed electrolyte containing 0.1 M HCl.
Ayyappan and Sivakumar 25 added hydrogen peroxide to a sodium chloride electrolyte to machine 20MnCr5 steel and found the MRR was increased with the addition of the hydrogen peroxide.
Ayyappan et al. 26 also added ferric nitrate to a sodium chloride electrolyte for the machining of 20MnCr5 stainless steel. They observed an improvement in MRR and surface roughness by enhancing the ionisation of the electrolyte.
Ghoshal and Bhattacharyya 15 created micro-channels in SS-304 stainless steel with a sulphuric acid electrolyte (H2SO4). They found that the channel width varied more with a less concentrated electrolyte, decreasing the accuracy. This was thought to occur due to the small number of ions in the solution available to take part in ECMM. Micro-sparks could occur due to the increase in electrolyte resistivity which in turn would increase the standard deviation of the channel width. They also showed that a very low concentration (0.1 M) created a larger overcut than a 0.2 and 0.3 M electrolyte, yet the 0.3 M electrolyte created a larger overcut than the 0.2 M electrolyte. They concluded for their application that 0.2 M H2SO4 was the optimal concentration.
Jain et al., 16 using a sewing needle with a tip of 47 μm diameter as the tool to machine micro-holes, found that hole diameter first increased as the concentration increased but then decreases. They attributed this to the reduced ion mobility in solution because of the high concentration. Their set up allowed them to create a micro-tool on the same machine as the hole machining. This allowed them to eliminate errors associated with micro-tool clamping. In another case, Jain and Gehlot 17 were investigating the effects of several variables on the produced shape with through-mask ECMM. They observed that undercut initially increased with concentration but then began to decrease with an increase in electrolyte concentration. In this case, it was explained by an increase in current density which facilitated a shorter machining time in the vertical direction. This also meant the machining time in the lateral direction was reduced, and here, the effect of the machining time dominated over the increased current density, reducing the undercut.
Rathod et al. 18 created micro-grooves in stainless steel using a sulphuric acid electrolyte. Concentrations only varied between 0.15 and 0.30 M. Up to 0.25 M, they observed an increase in overcut as the concentration increased. Above 0.25 M, the overcut began to reduce in size. This was explained by the way of an increase in gas bubbles generated at the micro-tool surface, decreasing machining. Saravanan et al. 19 observed the MRR increased with electrolyte concentration machining a super-duplex stainless steel (SDSS) using a sodium nitrate electrolyte with concentrations ranging between 0.4 and 0.5 M.
Wang et al. 20 stated that the electrolyte concentration affected the current density distribution which in turn affected the current efficiency and accuracy with a higher concentration creating larger overcuts. Wu et al. 21 created nano-tools electrochemically for use in ECMM. These tools were formed from wire which was held in the centre of a cathode ring with electrolyte held in this ring using the surface tension of the electrolyte (see Figure 4 for an illustration of their cell set up).
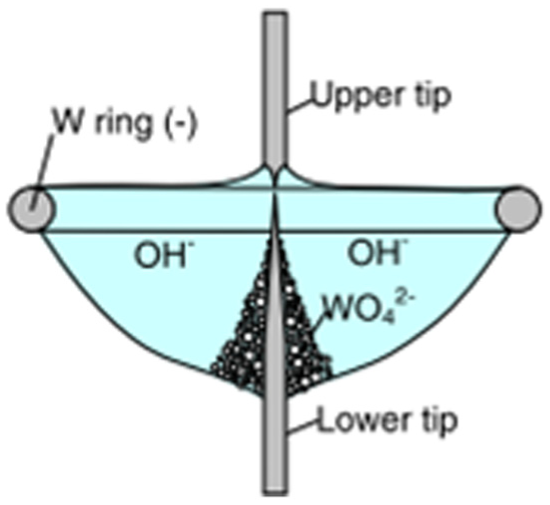
The electrode set up used by Wu et al. 21
They found the micro-tool diameter they were creating increased with increased concentration. This is because the material removed per unit time increases with concentration and the tip was being over-etched at higher electrolyte concentrations causing the tip to drop off.
Zhang 22 stated that high electrolyte concentration increases electrolyte conductivity, and therefore, a high current efficiency could be achieved. Trimmer et al. 23 indicated that a lower concentration leads to higher resistivity which ‘necessitates shorter current paths and increases resolution of machining’. They also stated that there is a lower limit to the concentration that can be used in ECM. This is because the ion content in the gap is not sufficient to completely charge the double-layer capacitance. The double-layer capacitor is the charged layer at the workpiece and tool surfaces.
De Silva et al. 24 observed that using a lower electrolyte concentration increased the Joule heating in the gap which could cause process variation, unless steps were taken to avoid this, for example, an increase in electrolyte flow rate. They also performed experiments to confirm that the current density decreases much more quickly as the gap increased at lower concentrations, showing that higher accuracy machining can be achieved with lower concentration electrolytes.
Most studies concluded that a low electrolyte concentration was more beneficial when machining micro-features as it kept conductivities to a minimum which prevented large machining overcuts even though a compromise was made with respect to the MRR and surface finish. This is different to macro-ECM operations where an importance is placed on the machining rate and surface finish but compromises on accuracy.
Pulse frequency and duration
Precise electrochemical machining (PECM) and ECMM utilise a pulsed potential as supposed to the constant potential used in ECM in order to achieve better resolution. Pulses are usually applied as a square wave with variations in amplitude (voltage), frequency and duration. Figure 5 shows an example waveform used during PECM.
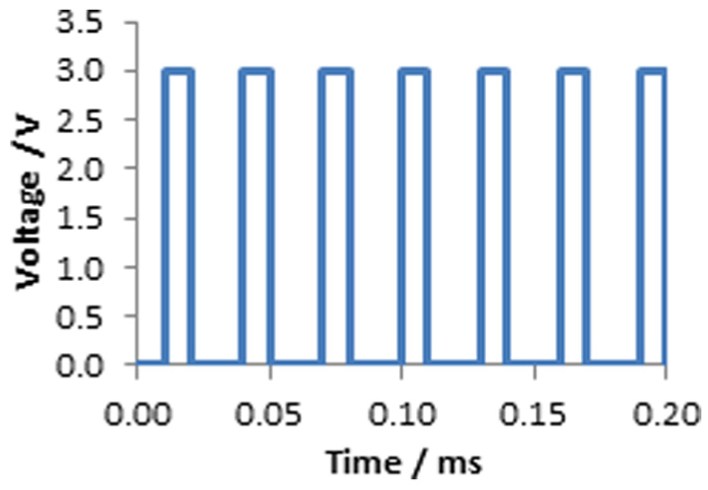
Pulsed potential wave.
During PECM, the pulse off-time is not usually equal to the pulse, as shown in Figure 5. The pulse off-time is usually longer in duration than the pulse on-time to allow sufficient time for the electrolyte in the IEG to be completely refreshed, taking with it any reaction products. The off-time also allows the double-layer capacitor to fully discharge. High-frequency pulsed potential during ECM restricts the electrochemical reactions to regions on the workpiece in close proximity of the tool.27,28 This phenomenon is based on the time constant for electrical double-layer (EDL) charging which varies with the ‘local separation between the electrodes’. 29 During nanosecond duration pulses, the time constant for charging the EDLs is small enough to allow significant charging only at electrode separations in the nano- to micrometer range. Rates of electrochemical reactions are exponentially dependent on the potential drop in the double layer, resulting in the reactions being confined to the regions close electrode proximity which are significantly charged/polarised.
The EDL, on both electrodes, is a capacitor which becomes charged when a voltage is applied between them. The charging current has to pass through the electrolyte, with the resistance encountered proportional to the length of the current path. Therefore, the time constant is locally varied as

where R is the resistivity, C is the capacity, ρ is the specific electrolyte resistivity, d is the local separation and
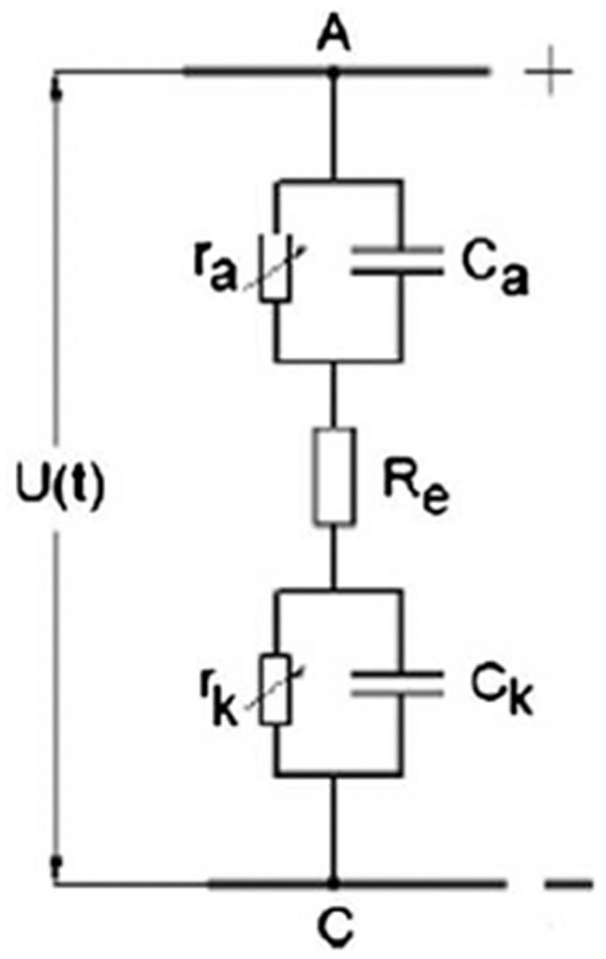
Model of the inter-electrode gap. 30
Many researchers have investigated the influence of applying pulsed potential during ECM.5,10,11,14,15,18,19,22,23,27–29,31–45 Cook et al. 31 seem to be the first group to design and apply a pulsed power supply to an ECM system. Their intention was to apply a short negative pulse after a positive pulse to remove the passive layer which was forming on the workpiece, with the aim to improve MRRs and allow machining of difficult-to-machine materials such as tungsten carbide (WC).
Choi et al. 5 machined a tungsten carbide alloy (WC–Co) using a pulse duration of 100 ns with a pulse period of 1 μs. They noted that the pulse duration must be long enough to dissolve the oxide layer to prevent damage to the tool. Bhattacharyya and Munda 10 observed that with pulsed voltage, the workpiece dissolved uniformly, whereas in DC-ECM, when the IEG is very small, deposits can form on the tool leading to non-uniform machining at the workpiece surface. Das and Saha 11 developed a pulse power supply to create cylindrical micro-tools from WC–Co. They found that the cylindrical micro-tool created increased in length as the pulse on-time increased, but above 1800 ns, spark machining was initiated causing a deterioration in surface quality. Sparks were probably formed here as the increase in pulse on-time increased the electrolyte temperature enough to induce boiling in the gap.
Fan et al. 14 observed smaller overcuts and straighter edged holes for higher applied frequencies with the same duty cycle, where the duty cycle is defined as

The same researchers also reported that overcut increased with increased pulse duration. They attributed this to the increased polarisation of the EDL and an increased production of hydrogen evolution which results in non-uniform machining.
Ghoshal and Bhattacharyya 15 produced taper-less holes in SS-304 stainless steel with a low-concentration sulphuric acid electrolyte and a frequency of 5 MHz and a duty cycle of 40% which relates to a pulse on-time of 80 ns. Saravanan et al. 19 observed that MRR increased as duty cycle increased, but decreased as frequency was increased. Increasing the duty cycle increases the percent of each cycle for which a voltage is applied. Increasing the frequency decreases the time period of each cycle. In this case, they did not consider how these parameters affected the machining overcut.
Zhang 22 witnessed that a short pulse on-time applied over a long machining time (i.e. long off-time) led to a higher current efficiency at the macro-scale. This is most probably due to the complete renewal of the electrolyte during the pulse off-time. Trimmer et al. 23 utilised short voltage pulses to restrict stray machining to create high-aspect ratio holes and complex patterns. They observed that a shorter pulse in combination with a low electrolyte concentration gave the best machining resolution for the conditions studied.
Schuster et al. 29 is credited with applying pulsed voltages to improve resolution in ECM and take the applicability of ECM into micro- and nanotechnologies. Their calculations show that a pulse of 30 ns should produce machining with a resolution of 1 μm. They experimentally observed that resolution was linearly dependant on both pulse length and electrolyte concentration. They achieved a resolution of 1.4 μm experimentally in a copper workpiece.
Meijer and Veringa 32 observed that PECM resulted in a better surface finish and tool reproduction than ECM. Van Damme et al. 33 and Smets et al. 35 created models of the PECM process, investigating the effects of local electrolyte concentration variations. They observed an off-time >90 ms, for the system they were studying, allowed the electrolyte in the IEG to be completely refreshed to bulk conditions, meaning each pulse is independent of the last pulse. As the pulses increase in duration, a viscous salt layer builds on the workpiece surface, eliminating water from the electrode surface. This prevents oxygen evolution, increasing the machining efficiency as the pulse duration increases because metal dissolution becomes the only reaction at the end of the pulse.
Zhang et al. 34 produced complex shapes in nickel (Ni) sheets using a 40-ns pulse. There was no stray machining observed due to the short length of the voltage pulse applied and large pulse off-time (460 ns) in comparison with the on-time.
Jo et al. 36 concluded that the IEG could be controlled by altering the pulse on-time, which in turn controls the hole diameter. This can be altered during machining, resulting in holes with a smaller entrance hole than inside (see Figure 7).
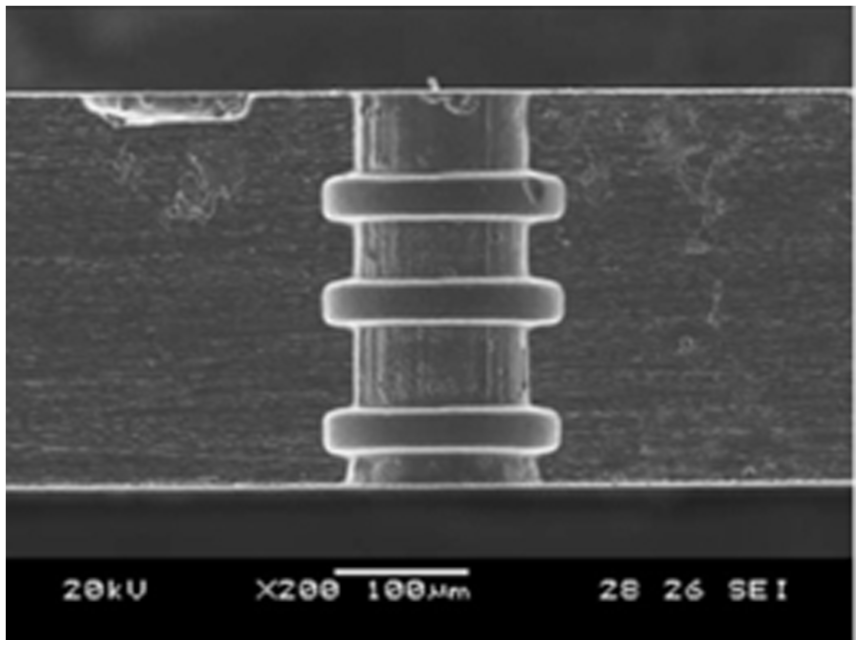
Groove array in a micro-hole. 36
Kock et al. 37 showed that PECM can be used to create complex, three-dimensional (3D) structures down to nanometer precision. The authors used a frequency of 33 MHz with 3 ns pulses of 2.0 V to machine 3D micro-structures into a nickel workpiece. Bilgi et al. 38 utilised PECM for deep-hole drilling. The pulses, along with an insulated tool, ensured there was no tapering of holes at the entry hole.
Lee et al. 39 used PECM to machine a nickel–titanium shape memory alloy. The authors saw an increase in machining inaccuracy when the duty cycle was raised above 50% with a pulse on-time varying between 10 and 75 μs. Xu et al. 40 observed that as the pulse duration increased from 25 to 40 ns, the surface roughness remained low, but above 40 ns, the surface roughness increased. The authors attributed this to there being more electrolyte products in the gap.
Cagnon et al. 28 performed PECM with two steps: a fast rough cut, followed by a slower fine cut. This was achieved by varying the pulse on-time from 143 ns for the rough cut to 50 ns for the fine cut. The authors created several complex, 3D micro-structures in stainless steel. Bhattacharyya 41 reported that PECM results in more accurate machining as it eliminates reaction products, including heat, from the IEG during the pulse off-time maintaining, a consistent electrolyte conductivity and an equal MRR across the machining profile.
Rajurkar et al. 27 produced a model to ascertain the IEG characteristics. They observed that for very short pulse times, the resolution was improved. Sun et al. 42 modified a PECM process to include a very short cathodic pulse in order to remove the anodic film that can form at the workpiece surface. This would allow an improved surface finish. They called this ‘modulated reverse electric field ECM (MREF-ECM)’. This process also benefits from the improved dimensional accuracy observed with PECM.
Datta and Landolt 43 developed an electrochemical saw with a pulsed voltage. They report that the use of a pulsed voltage negates the use of a complex electrolyte pumping systems while applying extremely high current densities as the off-time allows removal of reaction products and effects of Joule heating from the IEG. Mathew and Sundaram 44 created micro-tools with PECM starting with a wire with a diameter of 50 μm which was reduced to 13.7 μm, achievable due to the high control of the machining process seen in PECM. This method could be used for on-the-machine tool fabrication.
Rajurkar et al. 45 created a model to predict the minimum machining allowance or depth which confirmed the effectiveness of using short pulses to enhance resolution. In this case, a pulse duration of 1–3 ms with a duty cycle of 50% was sufficient for the desired accuracy. Rathod et al. 18 applied the same frequency pulses but varied the duty cycle, which changes the pulse on-time and the pulse on-/off-time ratio. A higher duty cycle resulted in a larger overcut, but surface roughness and width variation along the length of the machined channel improved with increased frequency and decreased duty cycle.
IEG
As discussed in the above section, the IEG is a critical parameter and maintaining a constant gap during machining is a challenge many researchers have tried to combat through modelling and in-line measurement systems.3,4,10,11,22,27,29,30,34,36–38,41,44,46–60 The gap maintained in PECM and ECMM is much smaller than in DC-ECM, in the range of 5–50 μm compared to 100–600 μm.3,22 This is because a smaller IEG leads to better resolution, crucial for ECMM. Figure 8 shows voltage profile across the IEG. The smaller the IEG, the smaller the applied potential has to be to reach the machining voltage as the ohmic drop caused by the electrolyte resistance is reduced. This is used to the researchers’ advantage. There is preferential dissolution of material which is closer to the tool electrode due to the higher potential, creating a higher current density at that point.
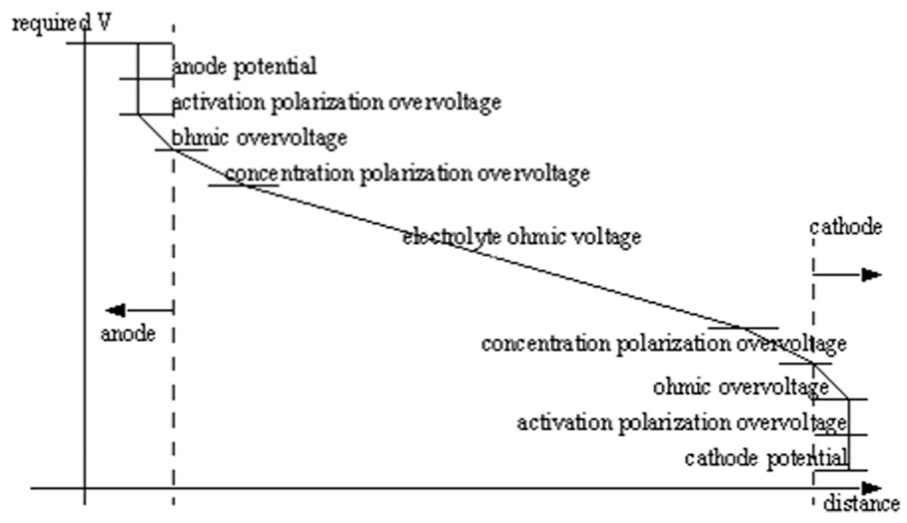
Potential profile within the IEG. 61
Researchers investigated how the IEG size affected several factors during machining. Bilgi et al. 38 observed that a smaller IEG led to a higher MRR. Jo et al. 36 realised the resolution varied with the pulse voltage and duration.
They used this observation to create complex internal shapes (Figure 7). Bhattacharyya et al. 41 reduced the IEG to micrometer scale by lowering the voltage and electrolyte concentration, resulting in higher resolution machining. Zhang et al. 34 found it much easier to control the IEG when nanosecond voltage pulses were applied due to the small amount of material removed with each pulse.
Zeng et al. 54 observed a better surface finish with a smaller IEG. Smaller IEGs result in higher current densities especially at peaks on the surface, preferentially dissolving those, levelling the surface. Jain et al. 16 maintained a constant IEG during machining, which resulted in micro-channels with high accuracy. Kock et al. 37 showed that with very short pulses, the localisation worsened linearly with pulse duration, and Sharma et al. 59 observed that a relatively high feed rate with a low applied voltage resulted in a small IEG. Kozak et al. 58 proposed that using smaller surface area tools facilitated a smaller IEG as the influence of heat and gas generation would be minimised. This in turn improved machining resolution.
Rajurkar et al. 46 created a model to determine the minimum IEG with the onset of electrolyte boiling being the limiting factor. If the electrolyte boils, gas bubbles are generated and diminish the volume of electrolyte in the IEG which could cause sparks. Rajurkar et al. 27 had previously modelled the IEG and the development of bubbles in the IEG, and how this affected machining. They reported that a very thin layer of bubbles or an even distribution of bubbles throughout the gap resulted in equal machining across the whole electrode interface. If the concentration of the bubbles was greater at one side of the gap, for example, at the electrolyte outlet, the machining rate would be reduced due to an increase in electrolyte resistivity.
Jain and Pandey 56 suggested that the IEG acted as a pure ohmic resistor. Kozak et al. 48 and Fang et al. 50 created models which predicted the IEG shape and size with Fang modelling the current distribution lines within the IEG too. Clifton et al. 51 also modelled the IEG but used C-functions to ‘map out parameter interdependence, resulting from non-ideal conditions’. This approach eliminated the need for time-consuming iterative trials used to determine the ideal tool shape.
Jain et al.49,55 and Mathew and Sundaram 44 created models of the IEG to design an ideal tool shape based on predictions for the desired anode shape (see Figure 9 for a flow diagram demonstrating all considerations in the model). Jain and Pandey 52 developed a model of the IEG in ECM. They noted that a decrease in the IEG resulted in a greater temperature and conductivity rise in the electrolyte. Kozak et al. 30 developed a model calculation, whereby the electric field within the IEG is described by Laplace’s equation to define the limiting gap size for a given pulse length, voltage and electrolyte concentration. During machining, Da Silva Neto 4 noted that improper control of the IEG led to poor tool replication; in their case, the surface finish was negatively affected, and Rajurkar et al. 60 noted that it was important for proper control of the IEG to prevent short circuits or arcing occurring during machining. The authors highlighted the importance of having gap monitoring and control systems. Schuster et al., 29 Bhattacharyya and Munda 10 and Das and Saha 11 all used a current detection method to maintain the IEG. A small voltage was applied between the tool and workpiece; the tool was slowly moved towards the workpiece, monitoring the current. When it is registered that electrodes are in contact, the tool is stopped and retracted by the chosen IEG distance. The current was monitored as a way to control the IEG during machining as the surface area was not expected to change.
Process simulation parameters 49 reprinted.
Wang et al. 53 developed a soft-CNC system which monitored the process and automated functions such as gap detection and adjustment. Labib et al. 57 developed a fuzzy logic control system, whereby the short-circuit situation could be avoided which the researchers thought could ultimately lead to a better surface finish. Muir et al. 47 utilised an ultrasonic method which would measure the IEG without disrupting the machining process. The ultrasonic transmit/receive transducer gave information regarding the workpiece thickness. Using this information in tandem with the tool position, the IEG could be calculated.
Voltage
From Faraday’s Law (see equation (1)), one can predict that the applied voltage in ECM will affect the amount of material removed through the relationship V = IR, where V is the voltage and R is the resistance. 24 In this case, R is the resistance of the electrolyte. With these two equations, it is possible to presume that a higher voltage will result in a higher current passing which would increase the amount of material removed during the same time period with a lower voltage.
Many researchers have demonstrated this to be true.8,10,14,18,19,21,24,30,31,38,40,43,55,62–64 Wagner 65 and Wang et al. 20 also stated that the current density is a function of the applied voltage.
However, when the potential is raised above a particular voltage (dependent on the workpiece material and electrolyte combination), the MRR decreased. They explained this by an increase in hydrogen gas generation at the tool electrode. These bubbles, trapped in the IEG, increased the resistivity of the electrolyte, decreasing the current density at the workpiece, decreasing MRR.10,18,38
Although a higher voltage leads to a higher MRR, it has other effects which may be detrimental to machining. Cook et al., 31 Cagnon et al., 28 Datta and Landolt 43 and Bilgi et al. 62 all noted that damage to the tool occurred when high voltages were used caused by sparking which affected machining accuracy. Tandon et al. 64 was investigating electrochemical spark machining and observed that a higher voltage increased the rate of tool wear.
Machining resolution also decreased as the machining voltage increased, illustrating that lower voltages are more appropriate for ECMM to keep overcut to a minimum. Bhattacharyya and Munda, 10 Fan et al., 14 Ghoshal and Bhattacharyya, 15 Jain, 15 Rathod et al., 18 Kozak et al.,30,48 Datta and Landolt, 43 Fang et al., 50 Bilgi et al.,38,62,66 Tandon et al., 64 Jain et al. 67 and Rao et al. 68 all observed an increased overcut when machining with a higher voltage, which resulted in more rounded edges. Sharma et al. 59 stated ‘good holes can be obtained by a combination of low voltage and comparatively high feed rate’. Acharya et al. 63 stated that the optimum voltage for a high MRR was higher than the optimum voltage required for geometrical accuracy.
Several authors also observed improved surface finish with a higher applied voltage.6,7,28,40,54 Xu et al. 40 noted an initial improvement in surface finish as the voltage increased. However, in their case, as the voltage increased above 6 V, the surface roughness increased. Sjöström and Su 69 stated that a lower applied voltage may lead to a better surface finish but at the cost of a lower MRR. However, Sjöström was using a non-aqueous electrolyte, suggesting the solvent was reacting undesirably with the workpiece surface at higher voltages.
Choi et al., 5 Bhattacharyya et al.,10,41 Kozak et al., 30 Cook et al. 31 and Jo et al. 36 all stated that the IEG could be lowered by the application of a lower machining voltage, which in turn increased the machining accuracy. Kozak et al. 30 showed that the limiting gap becomes smaller with a smaller applied voltage. The limiting gap is the minimum IEG that can be used at the settings chosen. Jo et al. 36 took advantage of this knowledge to create complex internal structures, see Figure 7.
Inman et al. 6 and Zhang 22 realised that a higher machining voltage was necessary to break through passive layers at the workpiece surface when using strongly passivating materials or electrolytes. Bhattacharyya and Munda 10 recognised an increase in Joule heating upon the application of a higher voltage. This caused changes in the local electrolyte conductivity, leading to an inaccurate tool replication in the workpiece. Das and Saha 11 noted an increased cylindrical length, when fabricating cylindrical micro-tools, with increased voltage up to 21 V. Above 21 V, the authors suspected that the end of the micro-tool was falling away due to increased machining at the electrolyte air interface. Bhattacharyya 70 suggests that this is due to air bubbles rising to the surface where they burst, minimising the diffusion layer which in turn increases the current density.
The direction of the reaction at the workpiece (deposition or dissolution) at a given potential can be predicted by the Nernst equation (equation (4))

where
Tool feed rate
The tool feed rate is a crucial parameter in ECMM to minimise overcut and maximise MRR. Cook et al. 31 first observed that the feed rate was dependent on the current density, with Singh et al. 71 also stating that the feed rate influences the IEG. More material is removed per unit time when the current density is higher which facilitates a higher tool feed rate.
Many papers report the use of a constant feed rate during ECM. The aim was to use a feed rate which matched the dissolution rate, so the IEG could be kept constant throughout machining.47,72 Researchers found if a very high feed rate was used, the IEG would rapidly decrease in width, eventually causing a short circuit, creating sparks which can damage the tool or workpiece.18,28,34,43,52,62 Ghoshal and Bhattacharyya 15 realised that the optimum feed rate was the maximum feed rate which did not induce sparking between the electrodes.
Authors observed that the MRR increased with feed rate,4,7,52,54,55,63,68 but it could lead to non-uniform dissolution as reported by Jain and Pandey. 52 This could be due to the increased temperature rise when the feed rate increased. The increase in feed rate can lead to electrolyte boiling or choking in the IEG.52,55
Many researchers studying the effect of feed rate on the ECM process noted a decrease in the machining overcut as the tool feed rate was increased.4,14,16,43,48,54,56,62 This is probably due to the observation that a higher feed rate decreased the IEG,38,48,51,71 which, as previously discussed, increases machining resolution. Some also reported a decrease in surface roughness with an increase in feed rate.4,54 In a couple of papers, authors reported an increase in dimensional inaccuracy with an increase in feed rate.68,72 Kozak et al. 48 also reported that above a certain feed rate, 63 mm/min, the sharpness of the edges decreased.
While most authors reported the use of a fixed feed rate during machining, Labib et al. 57 and Jain and Jain 72 maintained a constant IEG by adjusting the feed rate accordingly. They used a fuzzy logic control where real-time decisions could be made by the computer controller. This prevented the equilibrium IEG becoming established, possibly allowing a smaller IEG than the equilibrium gap to be maintained throughout machining. This is a promising technique which could improve machining accuracy.
Other alterations to ECM
Having discussed all of the common parameters controlled for precise ECM above, other alterations to the ECM process will now be explored. All of the alterations aimed to improve MRR or decrease machining overcut.
One of the most common alterations made to ECMM was the addition of vibrations to either the workpiece or the tool.40,41,73 Observations were made that the application of ultrasonic vibrations (USV) enhanced mass transport and improved surface roughness both when amplitude and frequency increased.
Qu et al. 74 pulsated the electrolyte instead of vibrating one of the electrodes. The authors reported an improvement in the surface roughness and increased MRR when the electrolyte pulsating frequency was increased. A maximum frequency of 20 Hz was applied.
Trying to improve machining precision, researchers began investigating ways to restrict and control the potential field between the tool and the workpiece. Tools were insulated which prevented machining in the side gap. Another alteration was the development of a dual-pole tool. The cathodic tool was initially insulated with an insoluble anodic layer on top. This reduces the chances of overcut due to stray machining by changing the electric field within the gap.3,75
Conclusion
A vast amount of research has already been conducted over the past 50+ years, observing the effects of electrolyte type, concentration, pulse frequency and duration, IEG, voltage, tool feed rate and other alterations such as the application of USV to one of the electrodes. High concentrations and applied voltages lead to a larger machining overcut and can lead to highly polished surfaces. The tool feed rate is matched to the MRR to maintain the IEG which allows even machining and prevents rounding of hole entrances.
Vibrations can be applied to either of the electrodes or to the electrolyte which helps to clear the IEG of machining products, solid, aqueous or gaseous. The gas bubbles cannot grow large when there is insonation. USV also improves the mass transport to and from the workpiece surface which therefore improves the machining rate of ECM.
There is no unified logic for IEG control. This is due to the random nature of gap conditions affected by the electrolyte condition and machining products in the gap. This makes gap control very difficult and subject to differing control ideas at present. Along with IEG control, there is a need for high-speed over-current protection systems to avoid sparking, and short-circuit damage to both the electrodes and the machine electronics.
Very little work has been conducted on ECM machining of semiconductor materials outside doped silicon materials. A wide range of semiconductor materials are being used more commonly in electronic equipment, some of which are brittle and difficult to machine with conventional machining processes. It is proposed to determine whether ECM is a suitable machining method for some of these semiconductors, including indium antimonide (InSb) and gallium arsenide (GaAs).
Another interesting field is the machining of superconductors. Most high-temperature superconductors are based on the perovskite crystal structure with internal layers throughout the structure which are crucial to the superconductivity of the material. Traditional, contact machining techniques can damage these layers through the application of physical pressure on the material. ECM is an ideal technique for machining superconductors as it is a non-contact, stress-free and heat-free technique.
Also, there has been no work, to the author’s knowledge, investigating the effect of crystal structure, comparing the results obtained in ECM for polycrystalline, monocrystalline and amorphous materials. This would be of interest with the aim to developing more precise machining results and manufacturing of MEMS (microelectromechanical system) devices, as well as testing the boundaries of archived roughness and feature size.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research reported in this article was supported by the European Commission within the project ‘Minimizing Defects in Micro-Manufacturing Applications (MIDEMMA)’ (FP7-2011-NMP-ICT-FoF-285614).