
Abstract
In this article, a novel redundant 3-degree-of-freedom parallel kinematic mechanism with high rotational capability is proposed and alternate configurations are presented. Taking the motion/force transmissibility into consideration, a local minimized transmission index is introduced and suggested to act as the performance evaluation criterion for this redundantly actuated parallel kinematic mechanism. On this basis, the optimum design of the proposed parallel kinematic mechanism is carried out and its rotational capability is investigated. The result indicates that the rotational capability of the proposed mechanism can surpass 115°. Compared with traditional parallel kinematic mechanisms, this represents a substantial advantage for practical applications. Using the redundant parallel kinematic mechanism as the parallel module, a redundant hybrid machine tool capable of five-face machining in one setup is developed and applied in the manufacture of parts with freeform surfaces.
Introduction
As the counterpart to traditional serial kinematic mechanisms (SKMs), parallel kinematic mechanisms (PKMs) have been extensively studied for more than 20 years and are attracting more attention from both academia and industry. This trend will continue due to the promising characteristics of PKMs, such as high dynamic response characteristics, high load-to-weight ratio, and compact structure.
According to the number of actuations and degrees of freedom (DoFs), PKMs can be generally classified into two categories: nonredundant and redundant PKMs. If the number of actuations is equal to that of DoFs, the PKM is nonredundant; if the number of actuations is larger than that of DoFs, the PKM is redundant. Based on the different redundancies, redundant PKMs can be further classified into PKMs with actuation redundancy 1 and that with kinematic redundancy.2,3
Compared with redundant PKMs, the nonredundant ones are more common in the field because of their relatively simple structure. In general, the over-constraint characteristic differentiates the 6-DoF PKMs represented by the famous Gough–Stewart platform 4 and lower mobility PKMs 5 in the area of nonredundant PKMs. To review the history of PKMs, the Gough–Stewart platform revolutionized the concept of machining when it first emerged as a possible configuration for machine tools 6 and has created a golden era for PKMs. Based on this mechanism, flight simulators and 6-DoF parallel machine tools (such as the hexapod 6 and variax 7 ) have been developed. Hereafter, PKMs were seen as the next major industrial innovation and were even claimed to be the next generation of machine tools. However, PKMs have not developed as previously expected and some limitations have been reported, such as the limited workspace, coupling between rotations and translations, and complex forward kinematics. For these reasons, PKMs with lower mobility instead of the 6-DoF PKMs have become an important research focus recently.8–10 This is due to the fact that this type of PKM can avoid or reduce the limitations of 6-DoF PKMs. The statement has been validated by the successful application of the Delta robot 11 in the packaging industry, a lower mobility PKM with 3 translational DoFs. This successful case has also set off an upsurge in the study of lower mobility PKMs, especially the 3-DoF PKMs. In the field of machine tools, the Sprint Z3 12 and Hermes 13 tool heads have been developed based on 3-DoF PKMs with 1 translational DoF and 2 rotational DoFs, and the corresponding five-axis hybrid machine centers, that is, Ecospeed and Space-5H, have been produced by combining serial modules with 2 translational DoFs to parallel tool heads. Similarly, the Tricept,14,15 Exechon, 16 and Verne 17 have been developed by combining serial models with 2 rotational DoFs to parallel modules with 3 translational DoFs. All the mentioned machines have their specific applications.
Of note is that higher stiffness and accuracy and better repeatability are constant pursuits in the application of PKMs in machining. These issues are very challenging and many efforts have contributed to this area. It is on this premise that redundant PKMs are taken into consideration. As is well known, redundant PKMs offer many advantages in contrast to the nonredundant ones. The introduction of redundancy is helpful to eliminate singularity and improve dexterity,18,19 to enlarge the workspace 20 or achieve a uniform workspace, to get better stiffness by the elimination of singularity and improve repeatability by the reduction of backlashes, 21 and to increase manipulability and the performance in terms of payload and acceleration. For such reasons, redundant PKMs are investigated extensively from the perspectives of design and analysis, control, and force capability. Machines based on redundant PKMs are also developed, such as the redundant scissors kinematics machine 21 designed for tool and die machining in Germany and the robotic wrist 22 based on a redundant parallel spherical mechanism. In this article, a novel redundant PKM with 3 DoFs is proposed and a redundant five-axis hybrid milling machine for processing workpieces with freeform surfaces is presented.
For the practical application of redundant PKMs, optimal design23,24 is the key problem to be solved. There are two issues involved: performance evaluation 25 and dimensional synthesis.26,27 Performance evaluation is the most important and challenging subject and lays the foundation for the process of dimensional synthesis. To the best of our knowledge, in the field of performance evaluation, most contributions focus on nonredundant PKMs. On that account, this article will introduce an index considering the motion/force transmissibility as the evaluation index for PKMs with actuation redundancy. Based on this index, dimensional synthesis of the proposed redundant PKM will be carried out.
The remainder of this article is organized as follows: Section “Description of the redundant parallel mechanism” introduces the architecture of the proposed redundant PKM and alternate configurations. Section “Optimum design of the redundant parallel mechanism” deals with the optimum design of the redundant PKM, and its rotational capability is also presented. In section “Application of the mechanism,” the redundant mechanism is used as a parallel module in a hybrid machine tool applied to the manufacturing of parts with freeform surfaces. Conclusions are presented in section “Conclusion.”
Description of the redundant parallel mechanism
A spatial 3-DoF PKM named
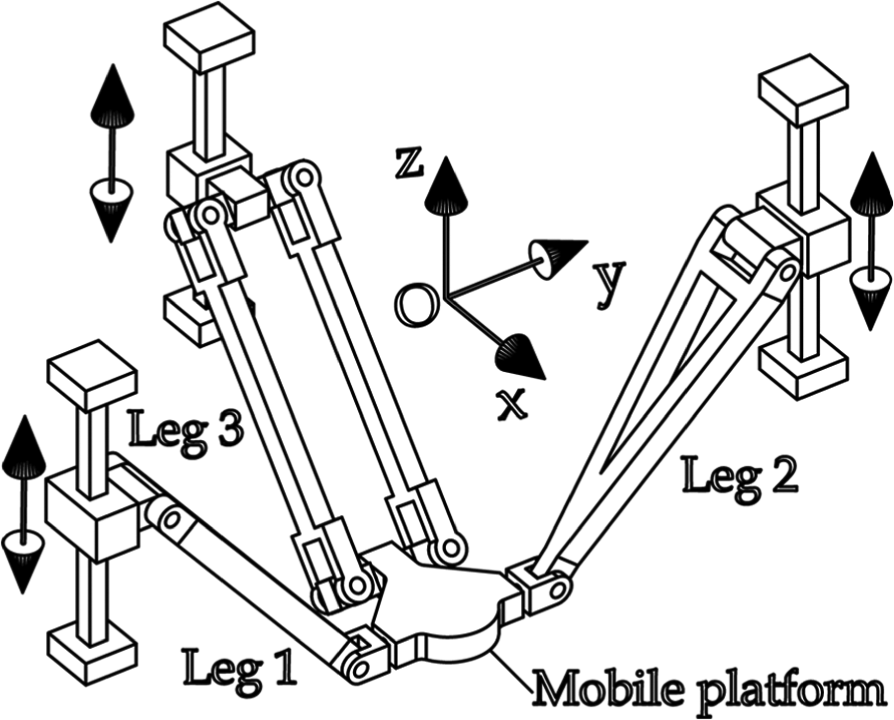
CAD model of the
By the prismatic inputs along the z-axis, the mobile platform can achieve two-dimensional translations in the O-yz plane and one-dimensional rotation about the y-axis. The rotational capability of the mechanism has been investigated and more than 90° can be achieved. 29 The high rotational capability of this mechanism breaks through the rotational workspace limitation of traditional PKMs and represents a considerable advantage for practical applications. Of note is that the rotation and the translation along the y-axis are coupled due to the parallelogram linkage used in the third limb. This is a disadvantage in terms of kinematics simplification and accuracy improvement.
In order to eliminate the negative influence of the coupling characteristic of the
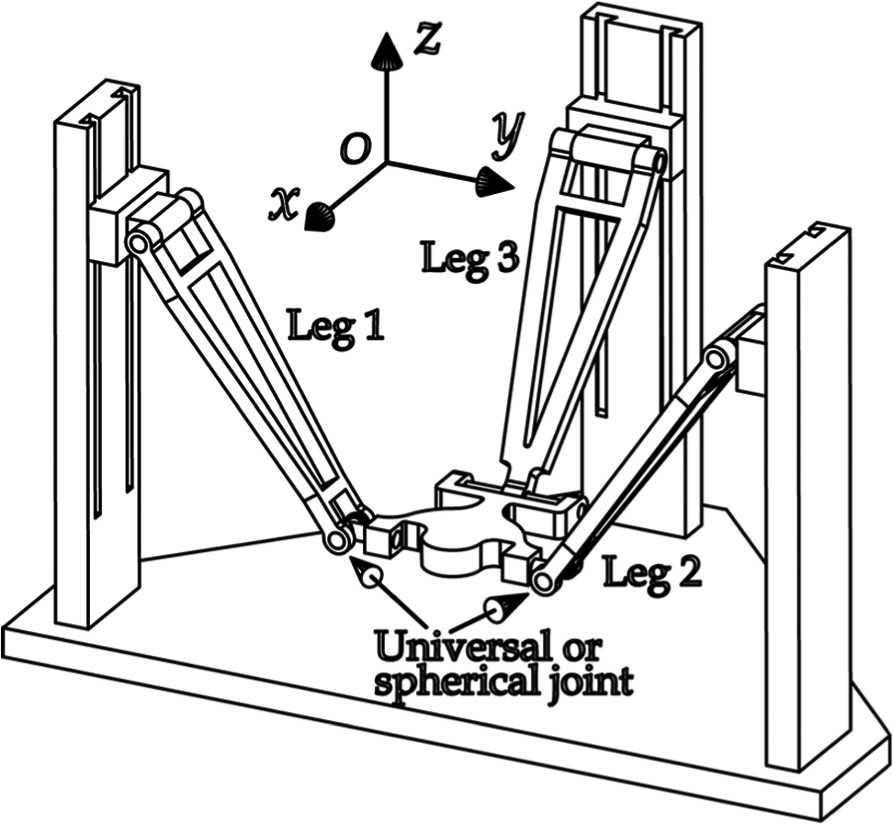
CAD model of the
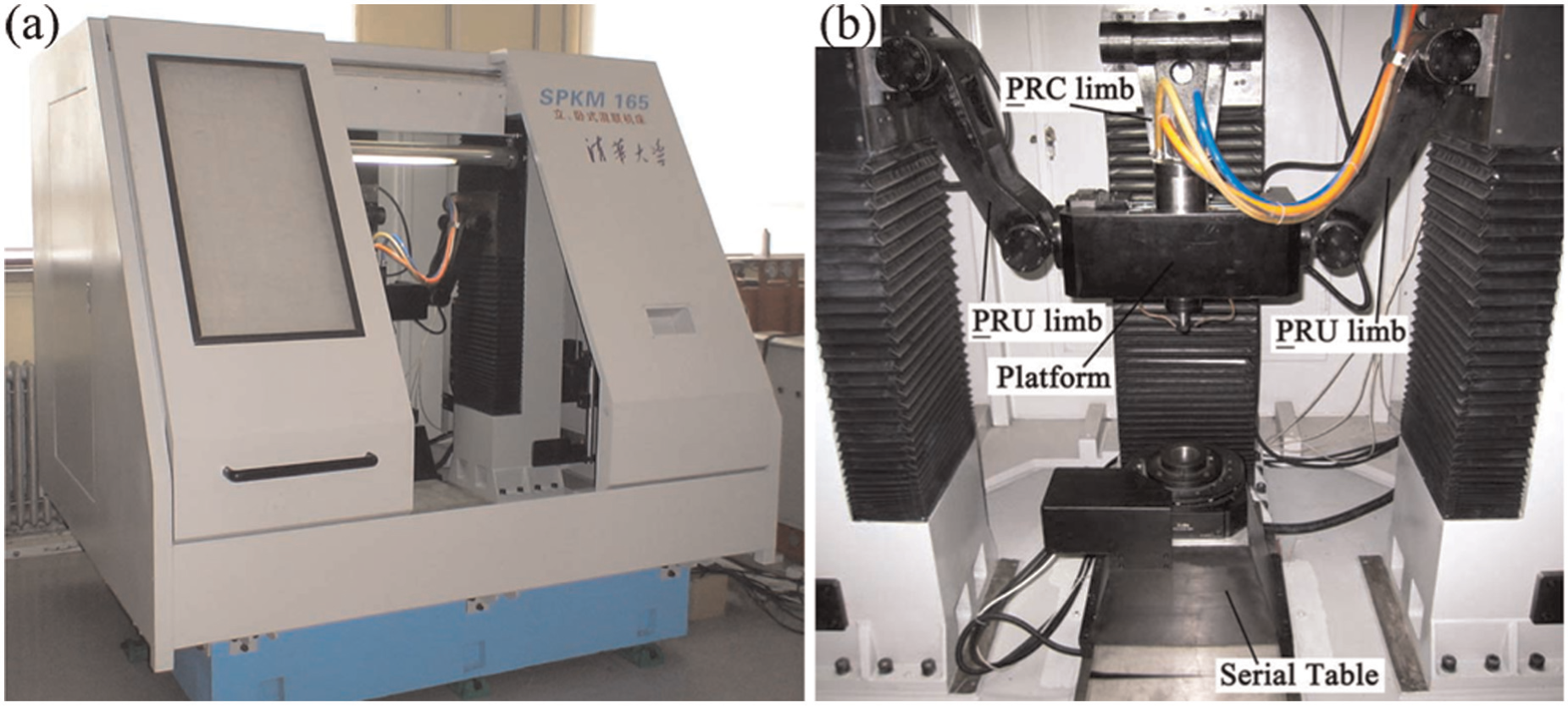
SPKM165 machine tool: (a) overall profile and (b) inner structure.
Experiments on the SPKM165 machine tool show that the mobile platform’s accuracy, especially that along the y-axis, is very sensitive to the cylindrical joint’s stiffness and accuracy. The couple constraint about the x-axis is realized by the third limb, and certain rotation about the x-axis will occur if there is a minor deformation or error within the cylindrical joint. Consequently, this rotation will lead to unwanted displacement along the y-axis. Thus, to achieve the required accuracy of the mobile platform, the stiffness and accuracy of the cylindrical joint must be sufficiently high. This is very difficult to realize with current manufacturing techniques. Moreover, higher stiffness of the cylindrical joint will be required when a larger displacement along the y-axis occurs. In other words, the translational capability along the y-axis is also limited. Therefore, the design of
Considering the cylindrical joint’s negative influence along the y-axis, improvements should be focused on the y-direction. It is well known that the introduction of actuation redundancy is very helpful to improve the stiffness, accuracy, and repeatability of PKMs. Therefore, we consider introducing actuation redundancy along the y-axis here. During the development of the SPKM165 machine tool, we have also found that the compound joints’ accuracy and stiffness are very difficult to guarantee in practice, and this will significantly affect the machine’s performance. Obviously, compared with compound joints, higher stiffness and accuracy of joints with only 1 DoF are easier to achieve. In view of this, the cylindrical joint and universal joint in
CAD model of the redundant PKM with only 1-DoF joints: (a) View I and (b) View II.
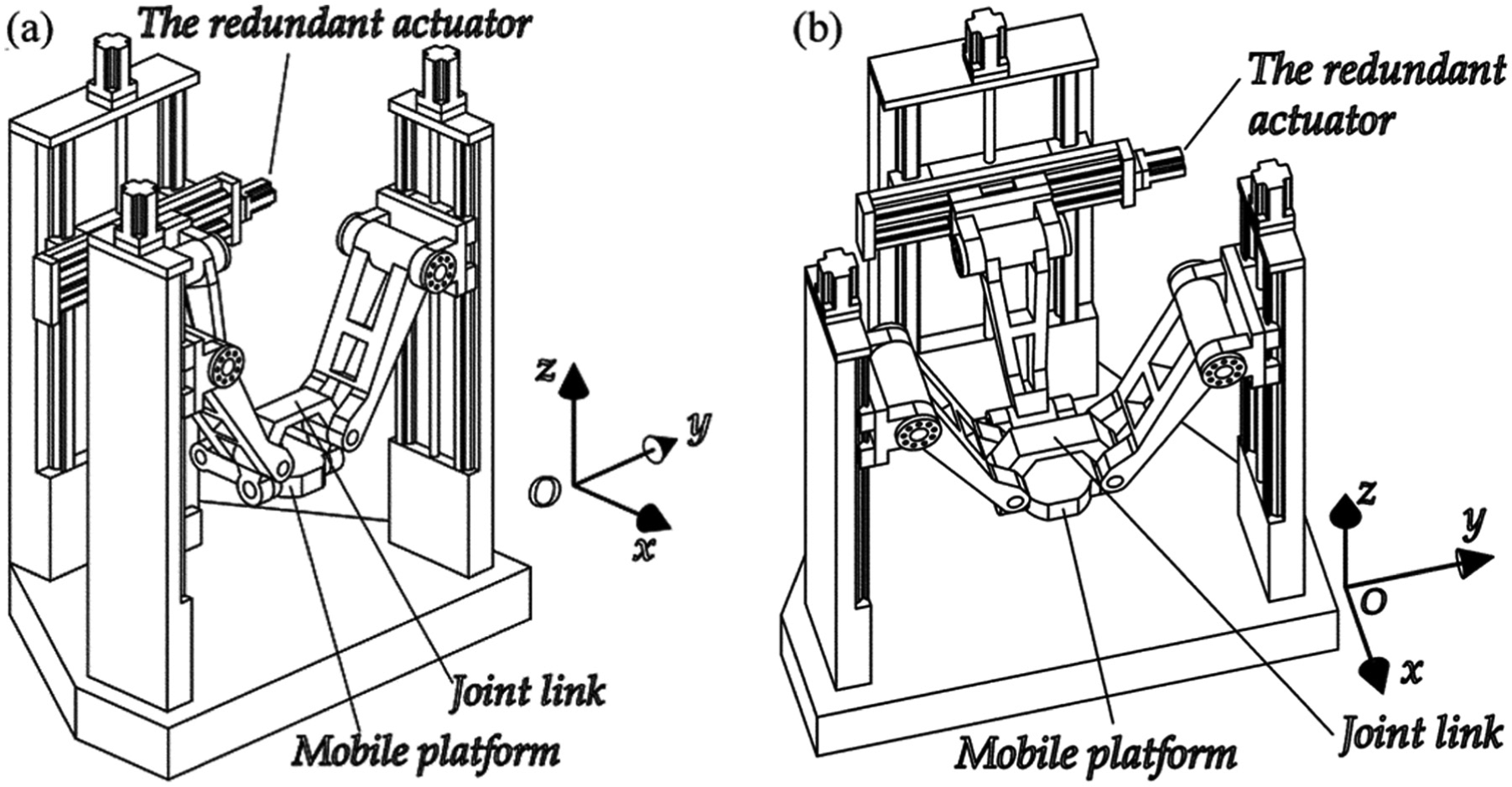
This redundant mechanism can also be realized by other configurations, such as the configurations presented in Figure 5(a) and (b). In Figure 5(a), the bases are not vertical but tilt at an angle
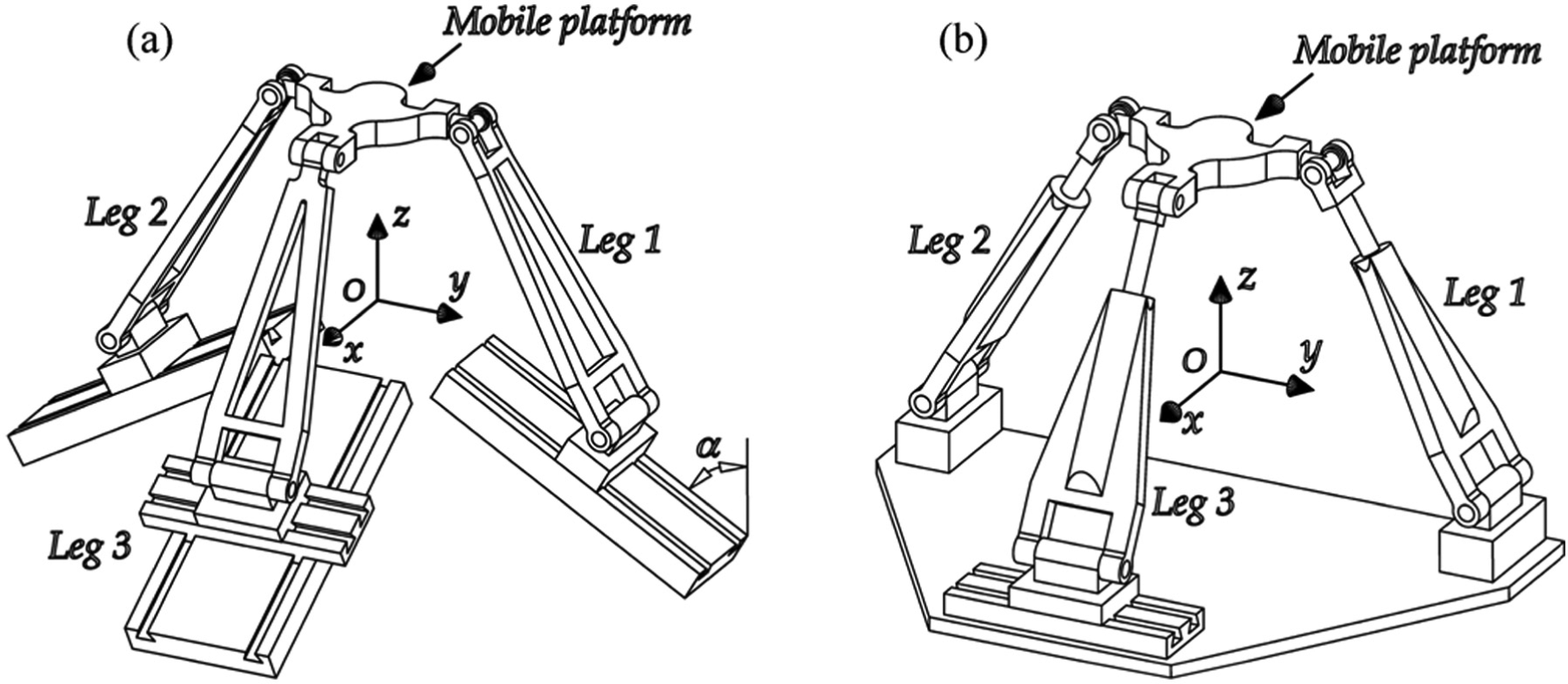
Other configurations of the redundant PKM: (a) Case I and (b) Case II.
Optimum design of the redundant parallel mechanism
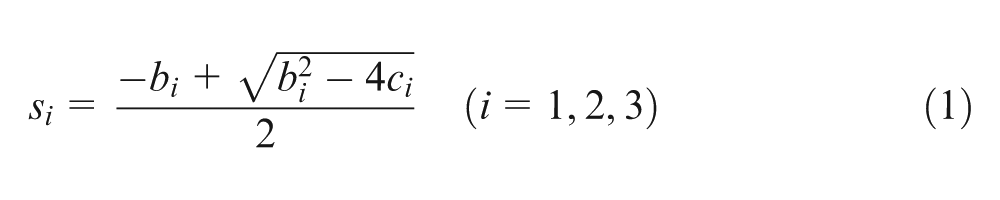
For practical application of the proposed mechanism, optimum design is indispensable. In this section, the optimization procedure of the mechanism in Figure 4 will be presented in detail. The inverse kinematics will be derived, and thereafter, the indices will be introduced and the optimum design will be carried out sequentially.
Inverse kinematics
The kinematic scheme of the discussed mechanism is presented in Figure 6. The local coordinate system
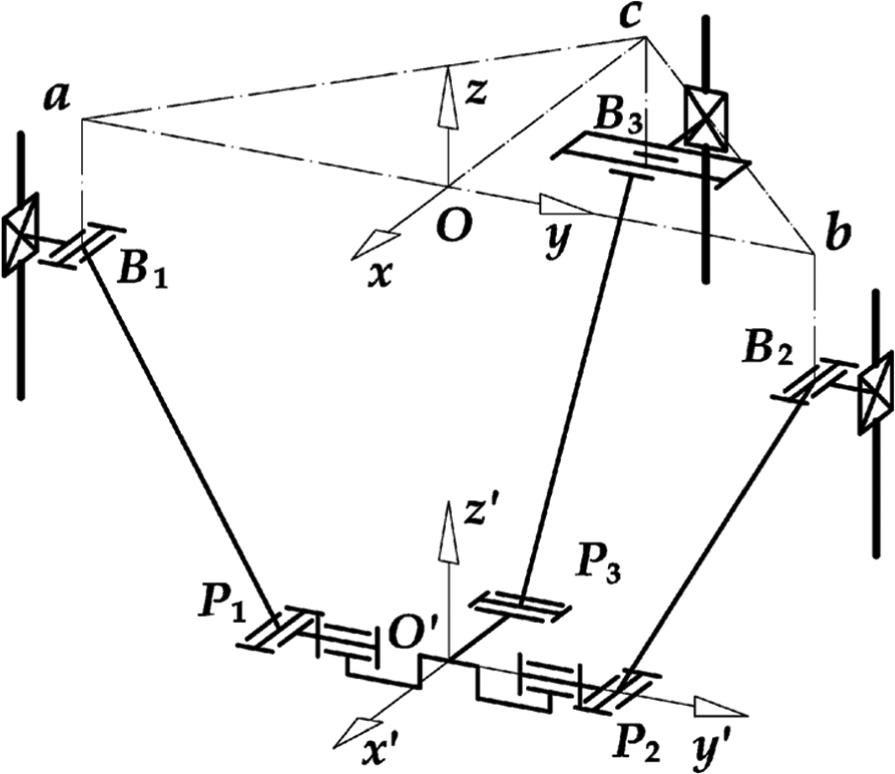
Kinematic scheme of the redundant PKM presented in Figure 4.
The nominal parameters of the proposed mechanism can be described as follows:

where
Optimum design of the spatial PKM with actuation redundancy
For the redundant mechanism presented in Figure 6, three inputs are along the z-axis and the redundant input is vertical to the z-axis; therefore, there is no need to consider the workspace along the z-axis in the optimum design process. On this account, only the translational workspace along the y-axis and the rotational workspace about the y-axis are considered to be optimized in this section, and the objectives
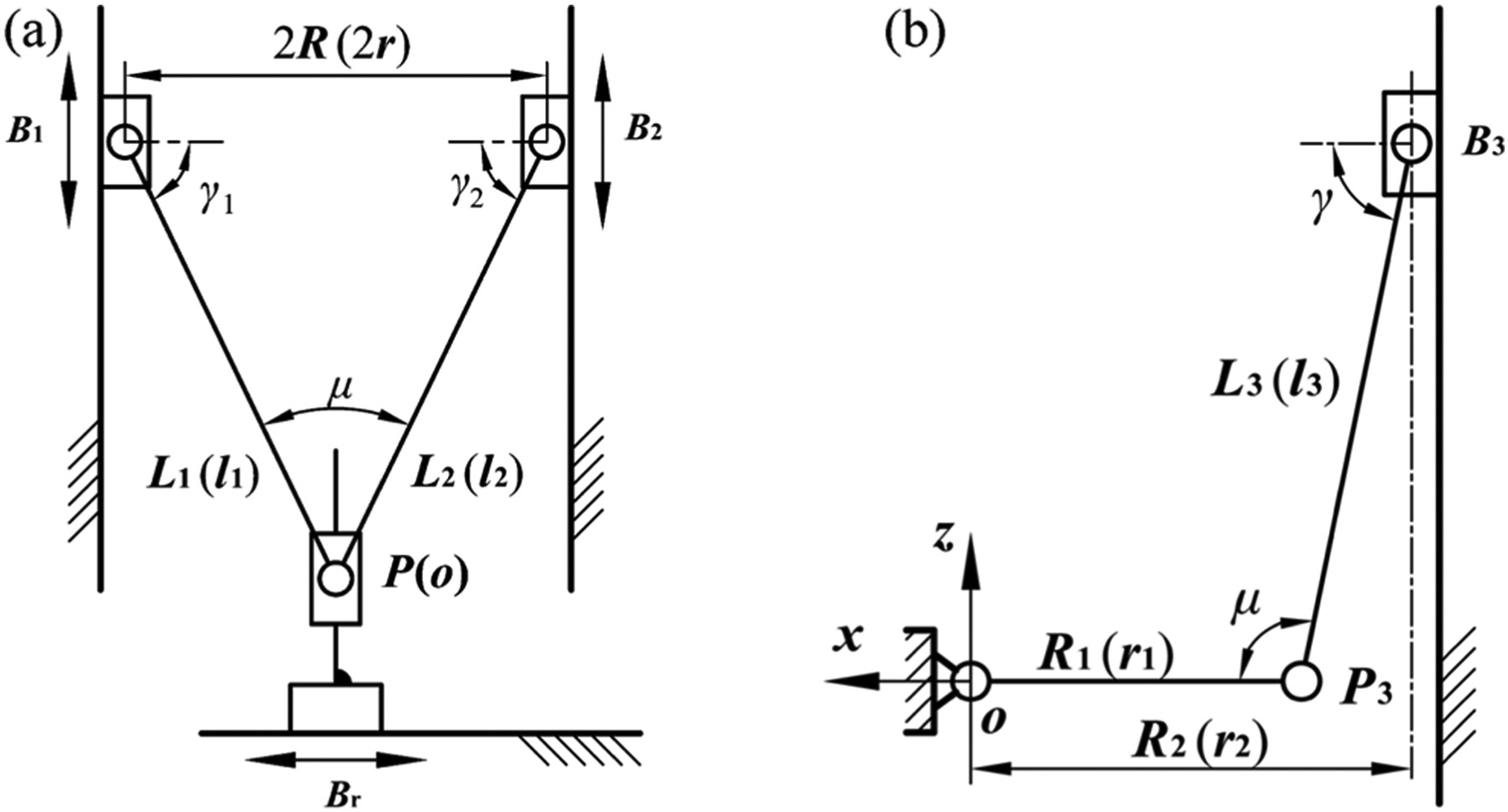
Kinematic schemes: (a) a planar PKM with actuation redundancy and (b) a slider–crank mechanism.
For the redundant mechanism presented in Figure 7(a), its optimum design is a very challenging issue, and few references regarding its design can be found. Taking the motion/force transmissibility into consideration, this section will introduce a performance index as the evaluation criterion for the discussed redundant PKM, and the optimum design will be carried out accordingly.
For PKMs with actuation redundancy, there exists mutual interference among the input forces of the active joints, and it is difficult to predict the force distribution for each active input. In view of this and taking the motion/force transmissibility into account, a local minimized transmission index (LMTI)32,33 has been proposed as the performance evaluation criterion for PKMs with actuation redundancy. This index can be summarized in the following.
Assume that
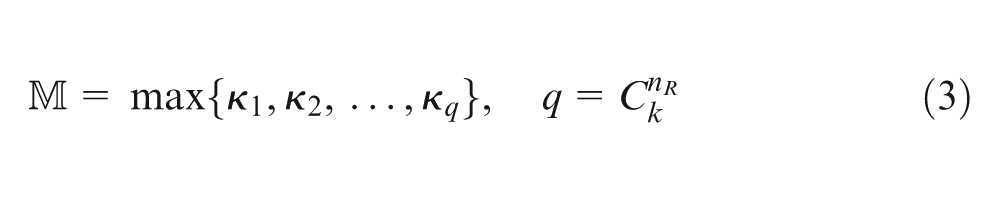
From the derivation of the LMTI, it can be concluded that this index can reflect the minimum motion/force transmission capability of the PKMs with actuation redundancy under a specific position and orientation, and a larger value of LMTI indicates that the motion/force transmission is more efficient.
On the basis of the definition of LMTI, by constraining

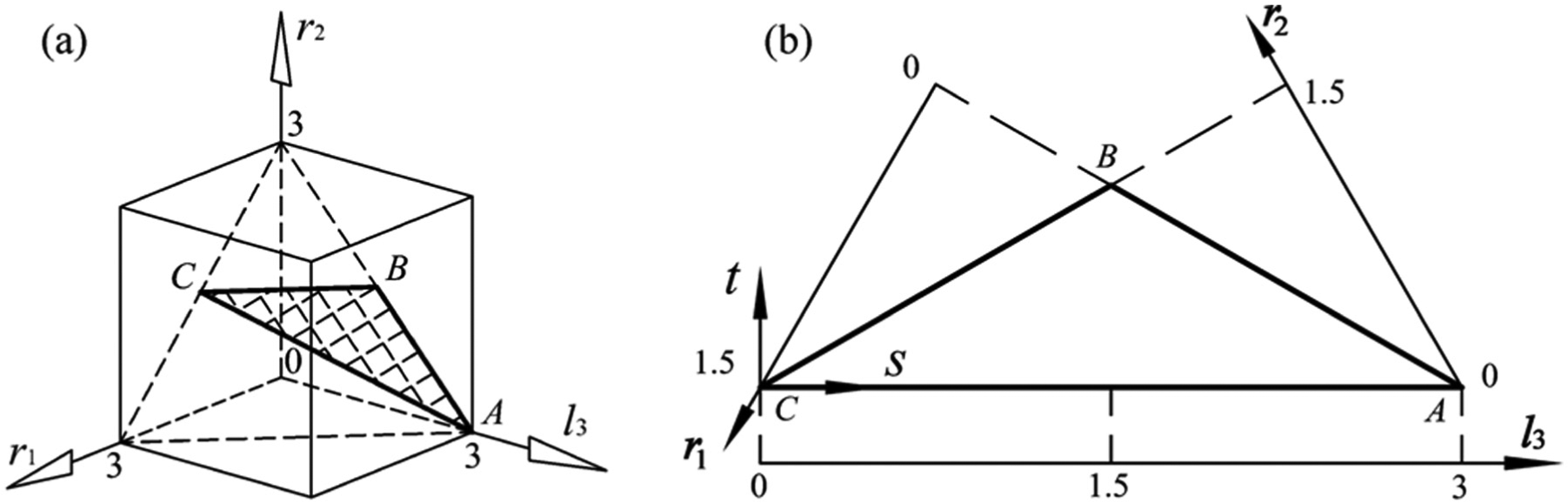
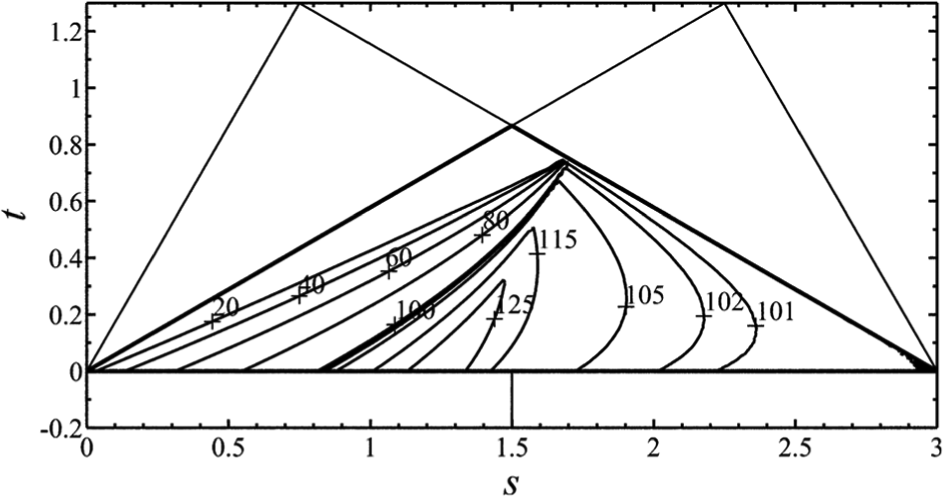
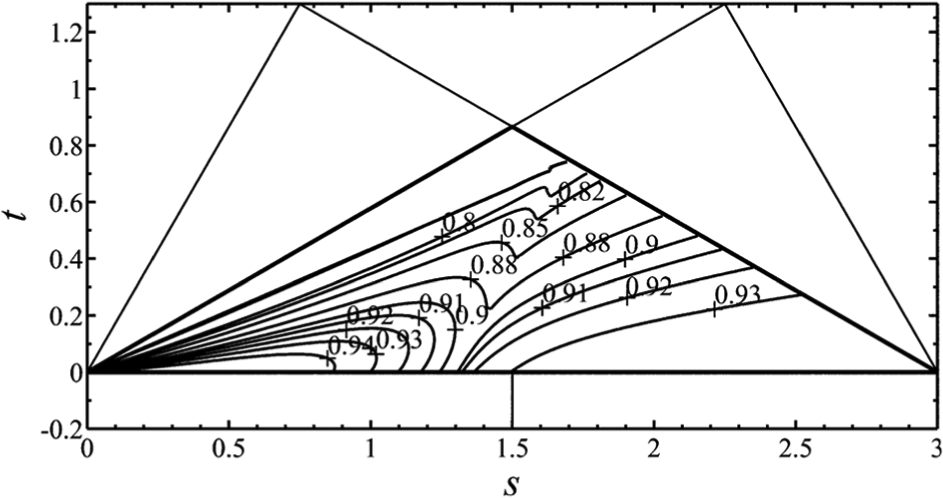
For the mechanism shown in Figure 7(a),
Atlases of the redundant planar PKM.
By constraining
For the nonredundant mechanism presented in Figure 7(b), the optimum design has been discussed in Xie et al. 36 The detailed process will not be presented in this article, and the results will be briefly summarized in the following.
There are three geometric parameters R1, R2, and L3 that can be normalized as

Parameter design space: (a) spatial region and (b) planar region.
For the slider–crank mechanism, the LTI can be generated and expressed by
where

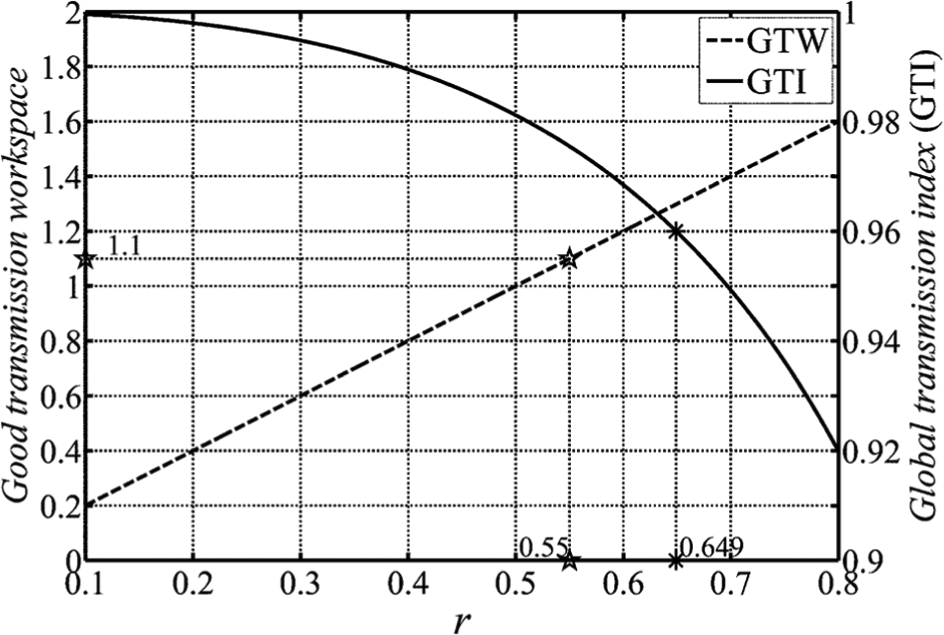
The atlases of the good transmission workspace and the global transmission index of the mechanism presented in Figure 7(b) are shown in Figures 10 and 11, respectively.
Atlas of the good transmission workspace in parameter design space.
Atlas of the global transmission index in parameter design space.
The design objective for this mechanism is
An optimum region in the parameter design space.
Rotational capability and motion/force transmission performance analysis
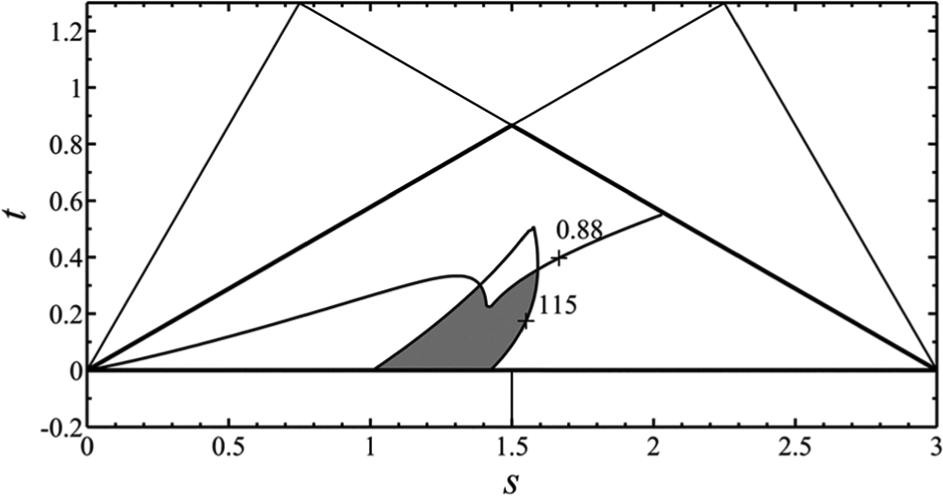
Based on the optimum design presented in section “Optimum design of the spatial PKM with actuation redundancy,” the geometric parameters of the redundant PKM shown in Figure 6 are as follows: L1 = L2 = 269 mm, L3 = 216 mm, D = 428 mm, L = 198 mm, R1 = 104 mm, and R2 = 160 mm. The design objectives
Actually, the rotational capability of the spatial PKM can be much higher if lower motion/force transmissibility is required, and the maximum rotational capability denoted by
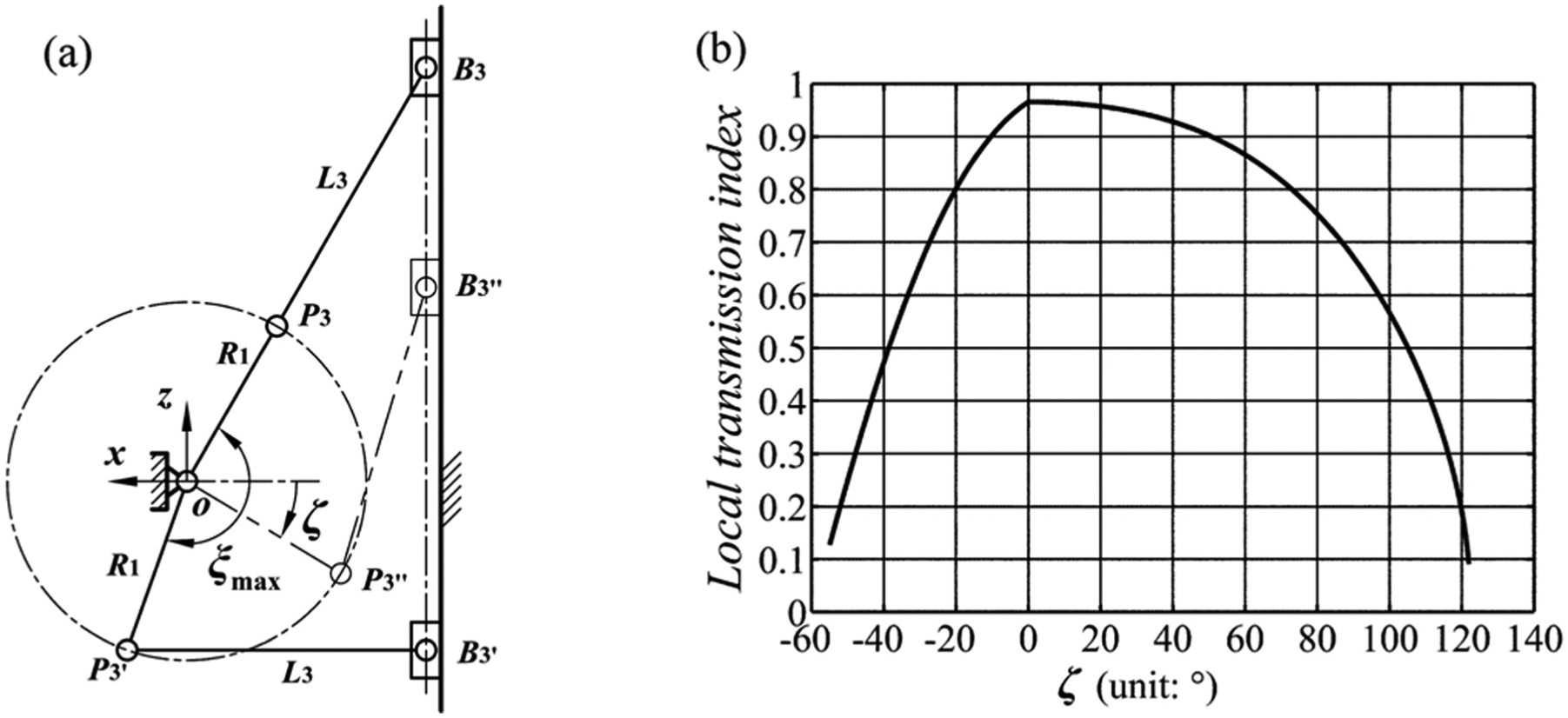
Rotational capability of the spatial PKM with actuation redundancy: (a) the maximal rotational capability and (b) the relationship between the rotational angle and the transmission index.
To fully investigate the motion/force transmission performance of the redundant PKM, the LMTI distribution over the entire workspace has been plotted and shown in Figure 14. The values of LMTI are more than 0.65 (
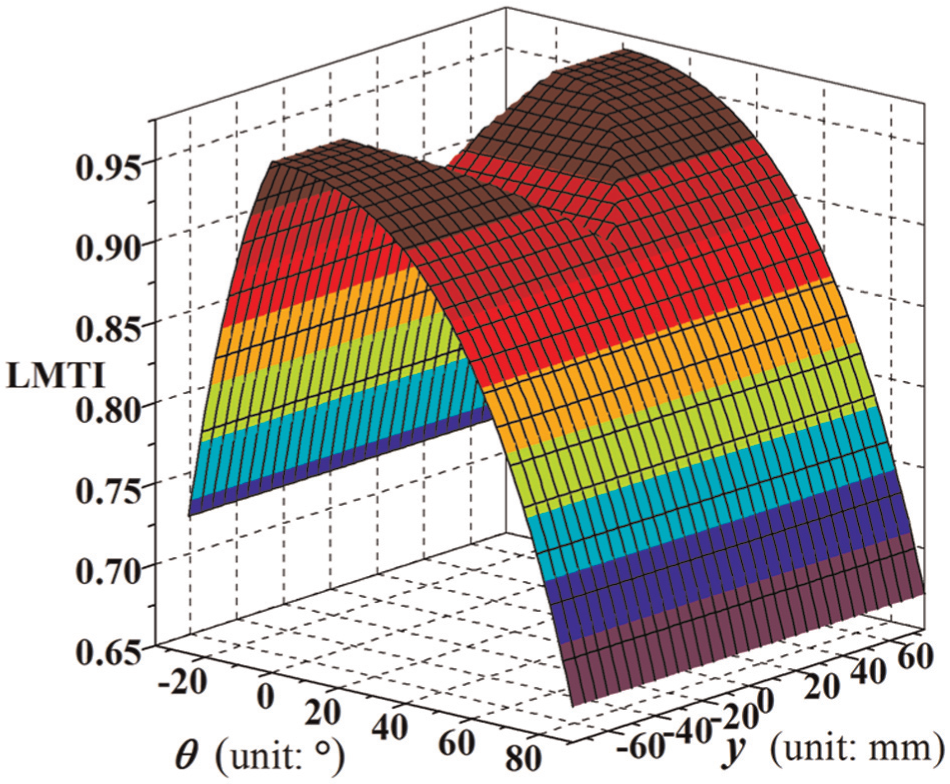
LMTI distribution of the spatial PKM with actuation redundancy over the entire workspace.
To optimize the spatial PKM, it has been decomposed into two planar mechanisms based on its kinematic decoupling characteristics. On this basis, the optimum design of the two planar mechanisms is carried out and the derived parameters are directly used in the spatial PKM. The optimization of the spatial PKM has also been proved to be reasonable by the atlas, as shown in Figure 14.
Application of the mechanism
As discussed in section “Description of the redundant parallel mechanism,” the proposed mechanism is characterized by high rotational capability. In this article, this redundant mechanism is applied in the machining field and is used as a parallel module of a five-axis hybrid machine tool. On the basis of the proposed PKM, a rotational table with continuous rotational capability and a prismatic DoF with large translational capability are serially combined to this parallel module. As previously discussed, the parallel module can rotate more than 90°. Therefore, this machine can realize a vertical–horizontal transformation in the machining process. Incorporating a continuously rotating table, the redundant hybrid machine is capable of five-face machining in one setup. This is a great advantage in processing parts with freeform surfaces. The conceptual design model of the machine is presented in Figure 15(a), and on this basis, the mechanical design is carried out, as shown in Figure 15(b).
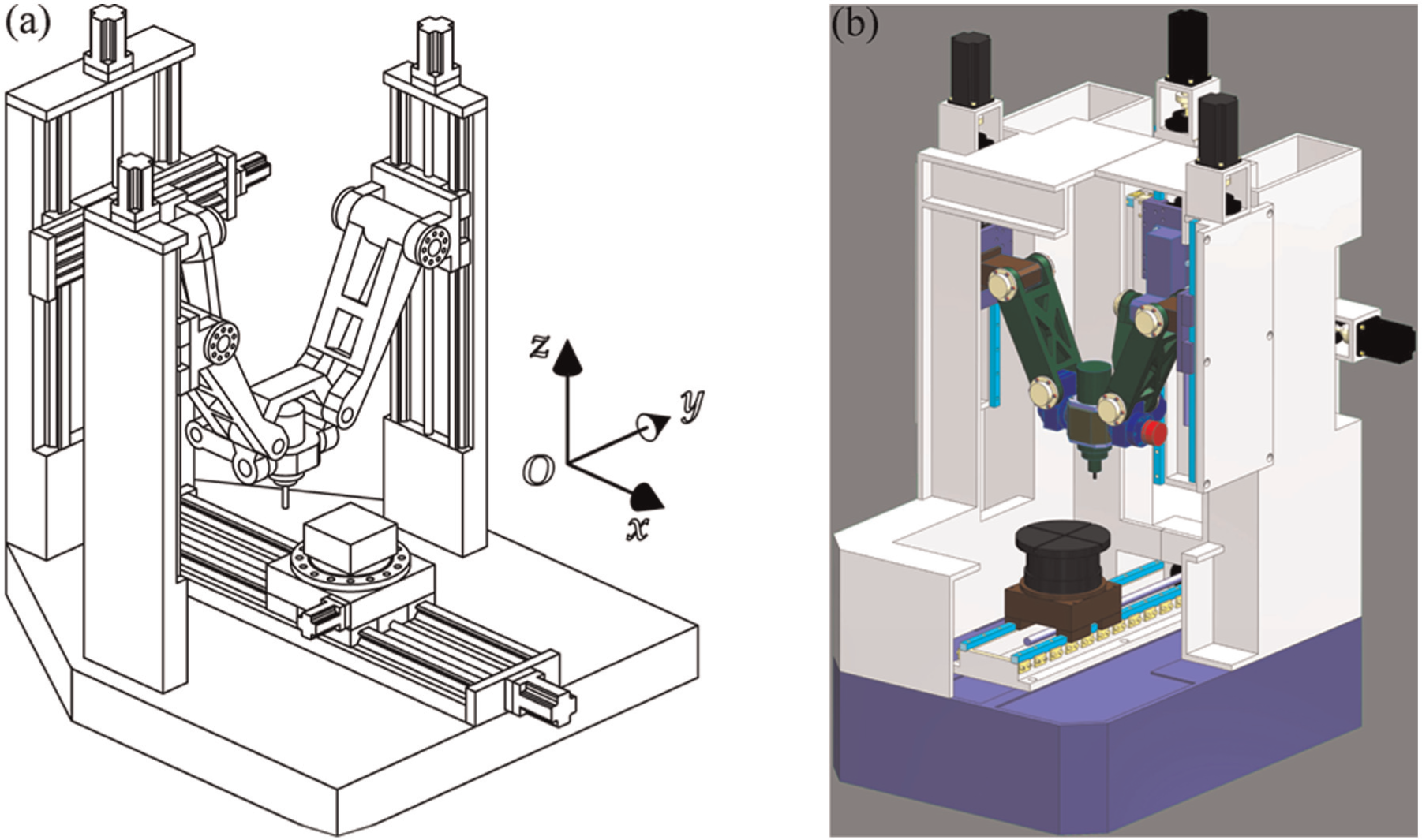
CAD models of the redundant hybrid machine tool: (a) conceptual design and (b) mechanical design.
Based on the design presented in Figure 15 and the optimum design carried out in section “Optimum design of the redundant parallel mechanism,” the RASPET 150 machine has been developed at Tsinghua University recently. The overall profile of the machine is presented in Figure 16. Using this machine, the machining experiments shown in Figure 17(a) and (b) have been carried out.

Overall profile of the developed redundant machine tool RASPET 150.
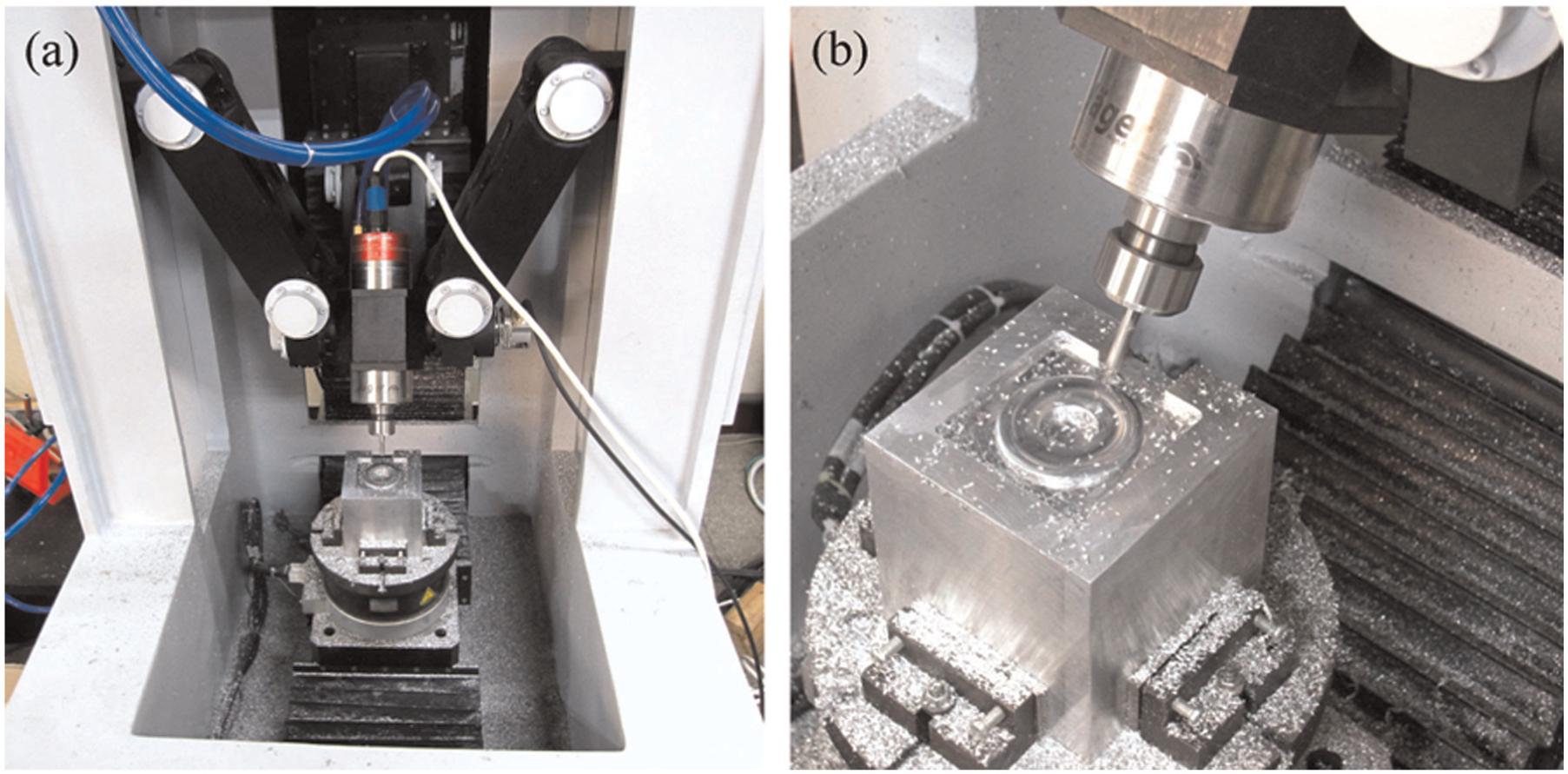
Machining experiments: (a) overview of the machining and (b) machining condition.
The finished workpiece is shown in Figure 18. We can see that the finished workpiece has good surface quality. Therefore, the experiments indicate that the developed machine has good machining performance in a practical application.
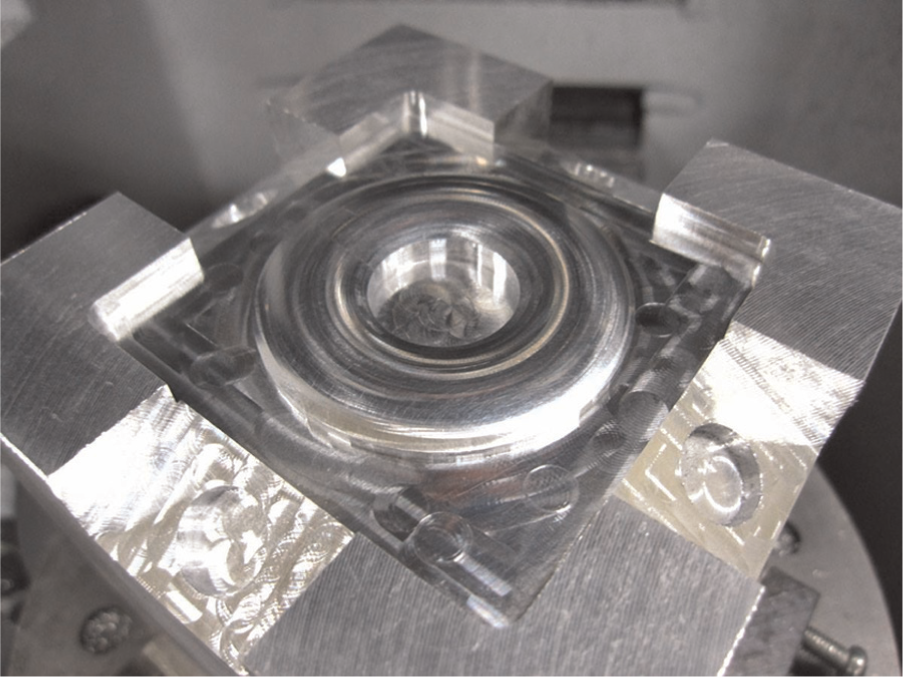
A finished workpiece processed by the developed machine (RASPET 150).
Conclusion
In this article, a novel 3-DoF (2 translational DoFs and 1 rotational DoF) PKM with actuation redundancy is proposed based on an already established nonredundant mechanism, and alternate configurations are presented. Taking the motion/force transmissibility into consideration, an LMTI is introduced as the performance evaluation criterion for PKMs with actuation redundancy, and the optimum design of the proposed PKM is carried out on the basis of the index. Thereafter, the rotational capability of the PKM is investigated and high rotational ability with more than 115° is derived. On this basis, the proposed mechanism has been applied in the manufacturing field and used as a parallel module in a hybrid machine tool (RASPET 150). The developed machine tool is presented, and the successful experimental results of processing a part with freeform surfaces are shown and discussed.
Based on this article, it can be concluded that the presented index can be used in the optimal design of other PKMs with actuation redundancy. Due to the high rotational capability of the proposed mechanism, the presented prototype is capable of five-face machining in one setup. This provides a considerable advantage in a practical application such as freeform surface machining.
Footnotes
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
This study was supported in part by the National Natural Science Foundation of China under grants 51305222 and 51135008, National Basic Research Program (973 Program) of China under grant 2013CB035400, and China Postdoctoral Science Foundation under grant 2013T60107.