
Abstract
Background:
Body-powered prosthesis users frequently complain about the poor cosmesis and comfort of the traditional shoulder harness. The Ipsilateral Scapular Cutaneous Anchor System offers an alternative, but it remains unclear to what extent it affects the perception and control of cable operation forces compared to the traditional shoulder harness.
Objective:
To compare cable force perception and control with the figure-of-nine harness versus the Ipsilateral Scapular Cutaneous Anchor System and to investigate force perception and control at different force levels.
Study design:
Experimental trial.
Methods:
Ten male able-bodied subjects completed a cable force reproduction task at four force levels in the range of 10–40 N using the figure-of-nine harness and the Anchor System. Perception and control of cable operating forces were quantified by the force reproduction error and the force variability.
Results:
In terms of force reproduction error and force variability, the subjects did not behave differently when using the two systems. The smallest force reproduction error and force variability were found at the smallest target force level of 10 N.
Conclusion:
The Anchor System performs no differently than the traditional figure-of-nine harness in terms of force perception and control, making it a viable alternative. Furthermore, users perceive and control low operation forces better than high forces.
Clinical relevance
The Ipsilateral Scapular Cutaneous Anchor System offers an alternative for the traditional harness in terms of cable operation force perception and control and should therefore be considered for clinical use.
Low cable operation forces increase the perception and control abilities of users.
Background
When users reject body-powered prostheses, they frequently describe the poor comfort and cosmetic properties1,2 associated with the traditional figure-of-eight and figure-of-nine harnesses. The traditional harness design is essentially the same as the design made by the Count of Beaufort in 1860 3 although improved harness comfort and appearance under clothing has been the main design priority of users since then. 2 Attempts to achieve improved harness comfort or appearance include the introduction of the axilla bypass ring, 4 the T-shirt system, 5 and the Ipsilateral Scapular Cutaneous Anchor System. 6 The Anchor System, patented in 2006, 7 is the only one of these alternative systems that is available commercially. It consists of a flat plastic patch that is adhered directly onto the skin at the scapula and contains a button that connects the body to the prosthesis’ Bowden cable. The Anchor System returns the unimpeded use of the unaffected side and reduces the strain on the armpit by eliminating the need for straps altogether, thereby resulting in both increased cosmetic value and comfort. 6
However, body-powered prostheses—as a natural extension of the body—should provide the user with proprioceptive feedback and control of operation forces. An alternative harness design might alter the extended physiological proprioception, 8 one of the main advantages of body-powered prostheses compared to current myoelectric prostheses.9–11 On one hand, the Anchor System is adhered directly onto the skin, which may result in a more direct force transmission and tactile feedback of high resolution. On the other hand, perception and control might be reduced because the Anchor System eliminates shoulder movements of the contralateral side and the resulting proprioceptive information of these movements. The user effectively has one less degree of freedom to operate the prosthesis. For this reason, it is expected that the traditional figure-of-nine harness would offer superior perception and control of operation forces compared to the Anchor System. However, this has never been investigated.
In motor control literature, force reproduction tasks are used to quantify force perception and control.12–15 Recently, these have also been implemented to quantify perception and control of low cable operation forces in voluntary closing body-powered upper-limb prostheses, 16 by investigating force reproduction error (FRE) and force variability (FV). The FRE, which is the difference between the reproduced and target forces, indicates the difference between the intended and exerted grasping forces in clinical practice. The FV implies the deviation in grasping force. A small FRE and a small FV are desired because this indicates that the user is in control of the forces he exerts on an object.
This study aims to compare force perception and control with the figure-of-nine harness versus the Ipsilateral Scapular Cutaneous Anchor System for a range of relevant (daily use) force levels. A second objective of this study is to investigate differences in force perception and control these force levels. This is done by comparing two metrics of a force reproduction task, FRE, and FV, which are attained for both systems at four target force levels. We hypothesize that the FRE, as well as the FV of the Anchor System, is higher compared to the figure-of-nine harness. Furthermore, based on the results of another study, 16 we hypothesize no differences in FRE and an increasing FV with increasing target force levels.
Methods
Subjects
In all, 10 right-handed male able-bodied subjects (age: 28 ± 2 years old) participated in our research. This study was approved by the Ethics Board of Delft University of Technology (ID number 1481).
Materials
A custom-made prosthesis simulator (Figure 1) consisting of a thermoplastic shell with 3 mm Neoprene on the inside connected via a standard 1/16″ (0.159 cm) diameter stainless steel cable (C100; Hosmer Dorrance Corporation, Chattanooga, TN, USA) running inside a stainless steel cable housing for C-100HD cable (CH-100HD; Hosmer Dorrance Corporation) to either an adjustable “figure-of-nine” harness or the Anchor System 7 (Cutaneous Anchor Technology; Single-Handed Solutions, LLC, Springfield, MA, USA; distributed by TRS Prosthetics, Boulder, CO, USA). The “figure-of-nine” harness and Anchor System were interchangeable. The cable excursion was disabled in this setup, and no prehensor was used in order to eliminate any influence from its mechanical properties. Operation cable forces were proportional to pinch forces exerted on objects in voluntary closing prostheses, and cable excursions remained constant when building up pinch forces on rigid objects. 17 The thermoplastic shell was attached to the participant’s lower left arm. The steel cable was interrupted by one force sensor (FLLSB200 222 N; FUTEK Advanced Sensor Technology, Inc., Irvine, CA, USA). The measured forces were amplified (CPJ; Scaime, Juvigny, France) and sampled together with the displacement sensor at 50 Hz (NI USB-6008; National Instruments, Austin, TX, USA) and finally stored using a custom LabVIEW program (LabVIEW 2012; National Instruments, Austin, TX, USA).
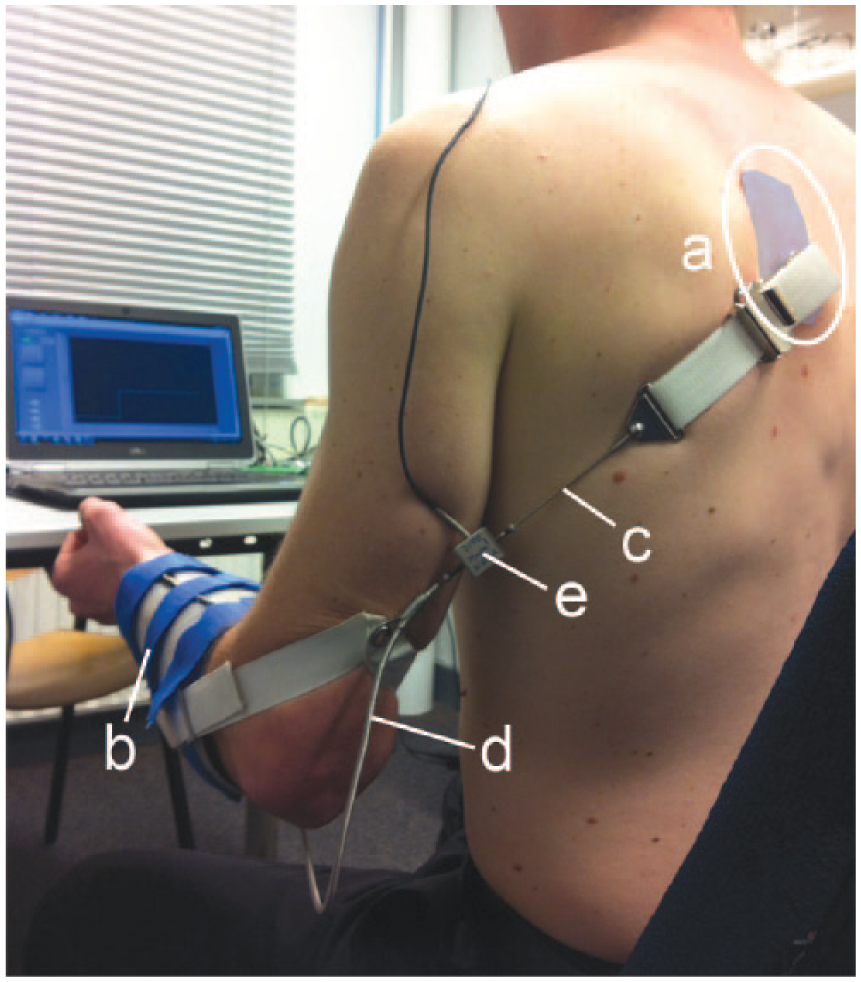
(a) The Anchor System is connected to (b) a thermoplastic shell via (c) a Bowden cable running inside (d) a cable housing. There is (e) a force sensor in the middle of the Bowden cable to measure the cable operation forces. The original color (transparent) of the Anchor System was edited to clearly show its dimensions in the figure.
Procedure
The experimental procedure is illustrated in Figure 2. First, either the Anchor System or the harness was fitted to the subject. Next, the control movements to operate a body-powered prosthesis and the experimental task were explained, and the subject practiced these during a training session. The subjects were requested to produce a target force as shown on a screen in front of them, using humeral anteflexion and abduction of the affected side, together with shoulder protraction of the contralateral side in the case when the harness was used. During a visual block, the target and measured forces were shown on the laptop screen, whereas during a blind block, only the target force was displayed for the duration of the force reproduction. In other words, during visual blocks, subjects reproduced the target force based on the visual information on the screen, whereas during the blind blocks, they based the magnitude of the reproduced force on the perceived force during a visual block. Participants were instructed to produce the force as stable as possible. The training was completed once the subject was familiar with the prosthesis operation and the experimental task. After the training session at 15 N, subjects conducted the actual force reproduction experiments at four force levels (10, 20, 30, and 40 N). One trial of the actual experiments consisted of 10 visual and 10 blind alternating blocks. One block lasted 7 s followed by a 3 s break, resulting in a duration of 200 s per trial. Then, the second system was fitted and a second training session started at 15 N in order to allow the subjects to familiarize themselves with the other system. This was followed by the actual force reproduction experiments at the four force levels. The order of tested system as well as the force levels was counterbalanced over the subjects. The Anchor System was fitted in accordance with the TRS instruction video. 18
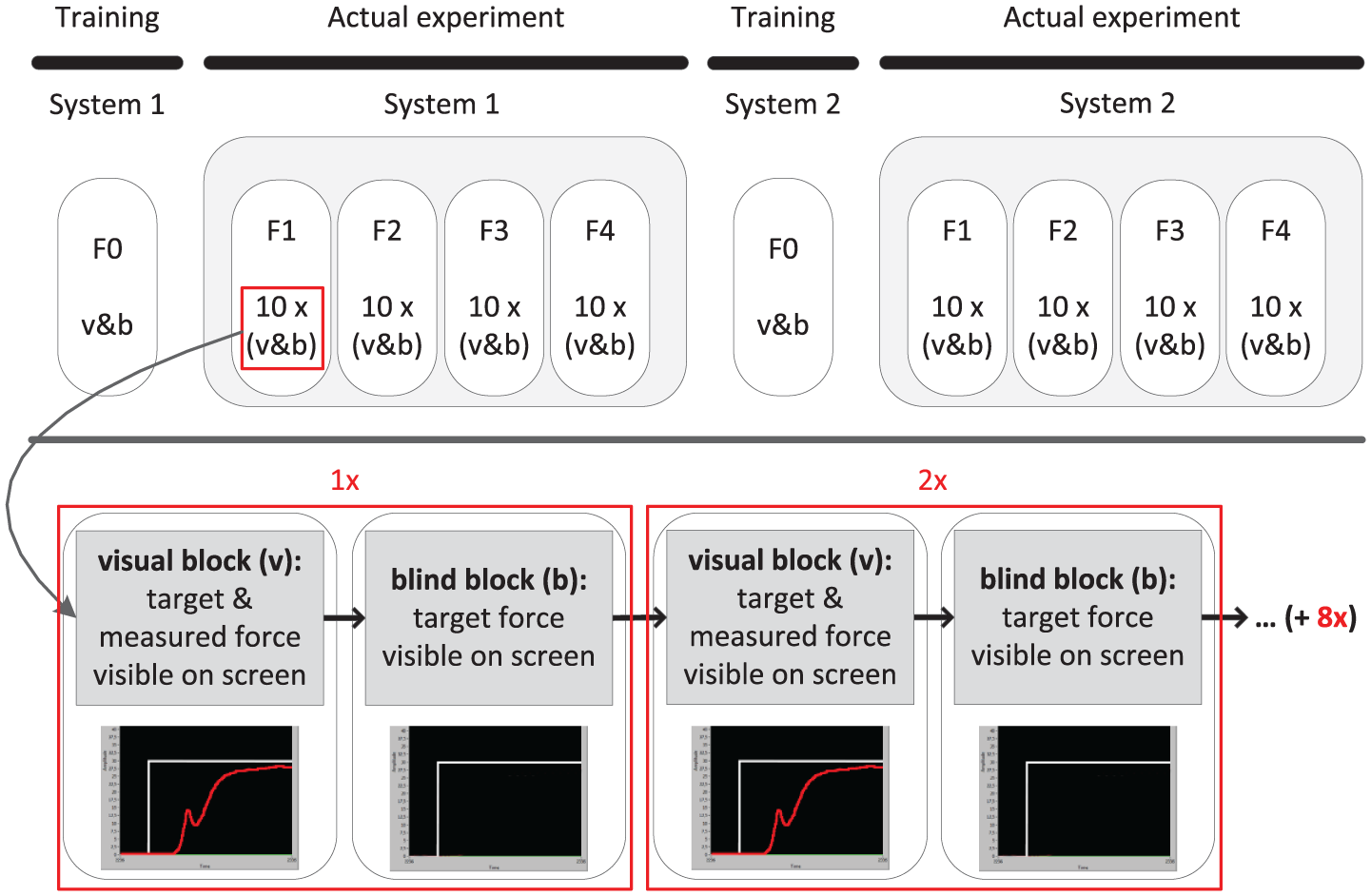
Flowchart illustrating the experimental procedure. Subjects performed the experiments with the two systems, Anchor System and figure-of-nine harness, with the order counterbalanced over subjects. After practicing at 15 N (F0), each system was examined at four force levels (10, 20, 30, and 40 N) during 10 visual and 10 blind blocks in alternating order. The force levels (F1–F4) were counterbalanced over the subjects. The order of force levels differed per subject.
The force levels examined were limited to prevent discomfort or, worst-case, skin damage, but were still representative of daily activities. At 10 N, the TRS hook started pinching, and with 40 N cable force, the hook pinched at approximately 20 N. 17 A pinch force of 20 N is reported to be sufficient to complete most daily activities with an upper-limb prosthesis.19,20
Data analysis
Metrics
Participants’ performance was assessed by the FRE, which is the difference between the target and reproduced forces, and by the FV, which is the noise of the reproduced force. The last 4 s of measured force were analyzed by calculating the mean and standard deviation (Figure 3). Because the perceived force during the visual block must be reproduced during the blind block, the FRE per block was calculated as the average force of a blind block minus the average force of the foregoing visual block (equation (1)). The results per block were then averaged over all blocks of the trial to obtain the overall FRE (per subject, per force level) (equation (2))


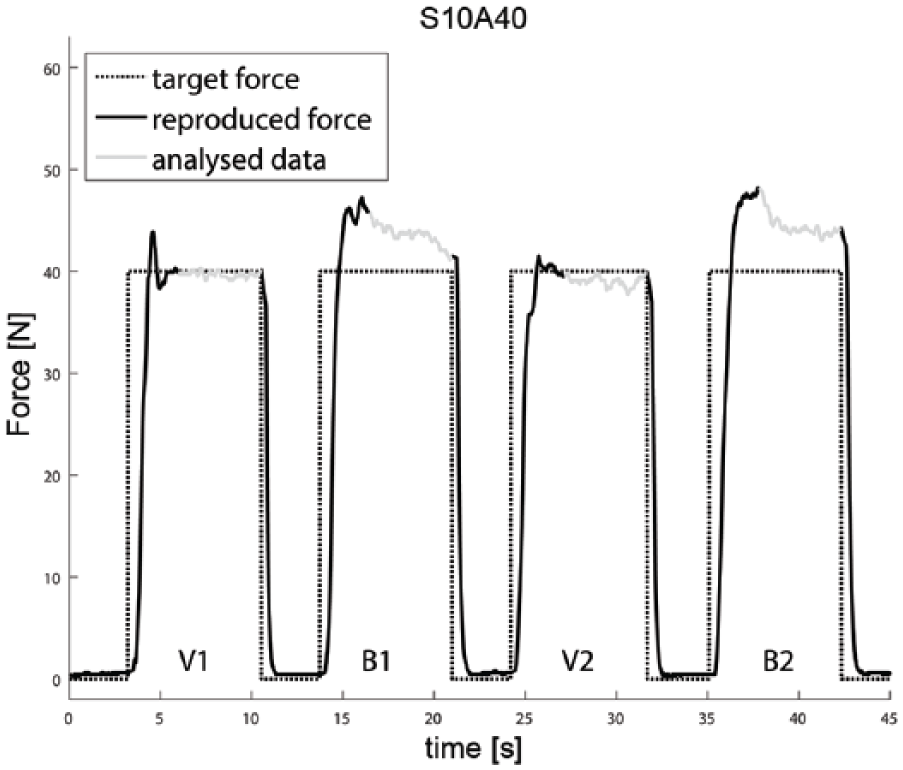
The raw data of the first 45 s of a typical trial (subject 10—Anchor System at 40 N) show the target force (dotted line) of 40 N and the measured cable force (black solid line) at the back of the subject. One full trial consisted of 10 visual blocks alternating with 10 blind blocks (only first 4 blocks shown). Each block lasts 7 s, followed by a 3 s break. The last 4 s of each block is used for data analysis.
The FV results from the standard deviation of the blind blocks (equation (3)) were averaged over all analyzed blocks (equation (4))


The FRE and FV were determined for each of the four target force levels for both the Anchor System and harness per subject. The mean FRE and mean FV represent the average values of the group.
Statistics
For statistical analysis, SPSS version 20 was used. A two-way repeated-measures analysis of variance (ANOVA) with two levels for harness system and four levels for target force levels was conducted to determine the experimental effects for the two outcome measures, FRE and FV. A significance level of α = 0.05 was maintained.
Results
No significant differences were found between the Anchor System and harness, for both FRE (F(1, 9) = 3.134, p = 0.11) and FV (F(1, 9) = 1.002, p = 0.343) as shown in Figures 4 and 5, respectively.
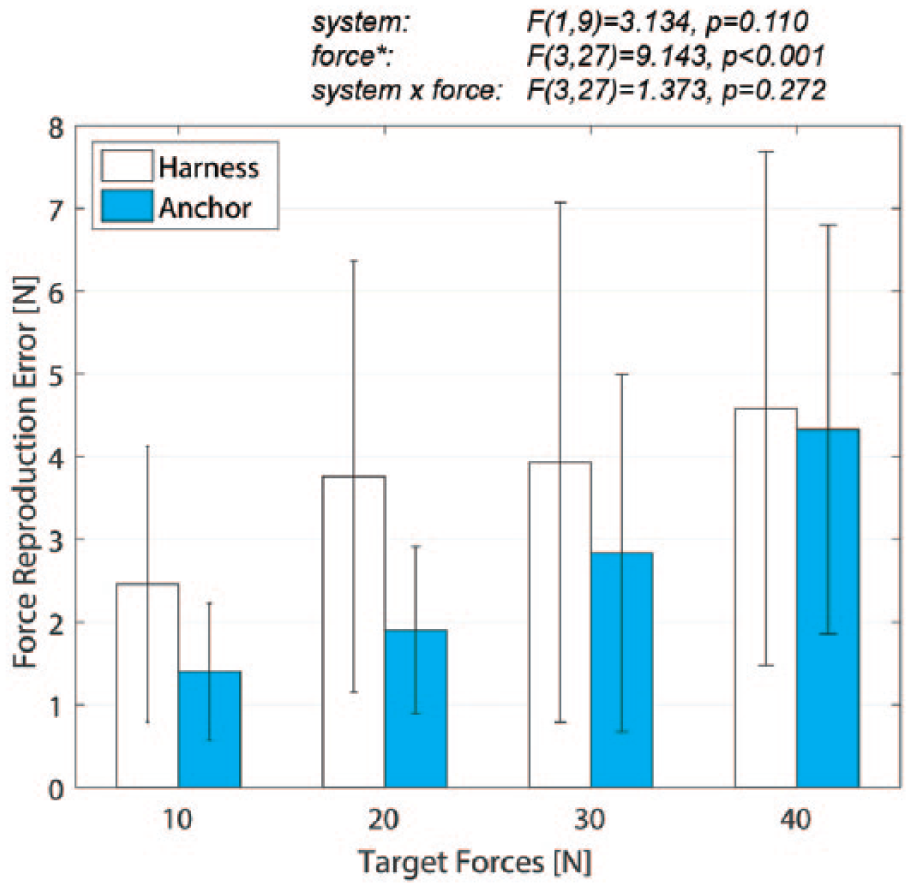
The force reproduction error (y-axis) is defined as the difference between target and reproduced forces. It is presented for the harness and the Anchor System (see legend) at the four examined target force levels: 10, 20, 30, and 40 N (x-axis). The bars indicate the group averages of the force reproduction error, whereas the whiskers show the standard deviations over the subject group (1 standard deviation above and 1 below the group average). Between the two systems, no significant differences were found, whereas the differences between force levels were significant (*).
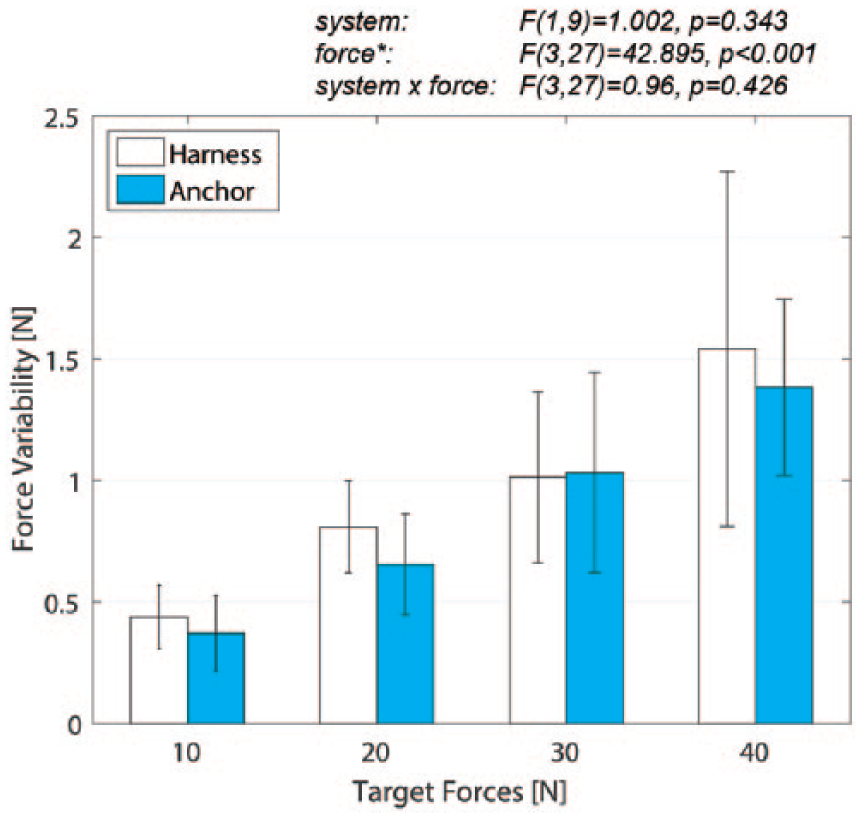
The force variability (y-axis) is defined as the deviation of the reproduced force (y-axis). It is presented for the harness and the Anchor System (see legend) at the four examined target force levels: 10, 20, 30, and 40 N (x-axis). The bars indicate the group averages of the force variability, whereas the whiskers show the standard deviations over the subject group (1 standard deviation above and 1 below the group average). Between the two systems, no significant differences were found, whereas the differences between force levels were significant (*).
However, significant differences between force levels were found for FRE and FV (FRE: F(3, 27) = 9.143, p < 0.001; FV: F(3, 27) = 42.895, p < 0.001). Both metrics increased as the force level increased. Target forces were overestimated for both systems at all target force levels, which is indicated by the positive mean FRE.
The interaction (system × force) did not have a significant effect (FRE: F(3, 27) = 1.373, p = 0.272 and FV: F(3, 27) = 0.96, p = 0.426).
Discussion
In contrast to what was hypothesized, we did not find a difference in FRE or FV between the Anchor System and the figure-of-nine harness. Both the mean FRE and mean FV increased significantly as the target force levels increased. This is in accordance with our hypothesis regarding FV, but not FRE.
Systems
Since there were no differences in FRE or FV between the two systems, subjects had no preference for either system in terms of perception and control of operation forces. This suggests that the disadvantage of less proprioceptive information in the Anchor System might be counterbalanced by the advantage of more direct force transmission and superior tactile feedback. Alternatively, the effects of each aspect, less proprioceptive information and more direct force transmission and superior tactile feedback, may be negligible.
Although not statistically significant, the mean and standard deviation of the FRE across the group of subjects appear lower for the Anchor System than for the harness at all force levels (Figure 4). The larger mean FRE and variability across the group with the harness might result from two outlier subjects, whose FRE was much larger than the other subjects. This might indicate individual preferences for one system over the other, but since the observed differences are not statistically significant, this does not justify a generalization of this preference for all users in terms of the accuracy to meet an (estimated) target force.
Force levels
In contrast to what was hypothesized, the FRE showed a significant difference between force levels. Post hoc analyses showed that the FRE was significantly different between 10 and 40 N, as well as 20 and 40 N. The increasing FRE with increasing target forces implies for prosthesis operation that users can exert the intended grasping force more accurately at low force levels.
The difference in hypothesized and determined results of the FRE might be explained by different subject populations of this study compared to the study on which we based our hypothesis. This study used a relatively homogeneous group of 10 right-handed male controls. The previous study used a heterogeneous group of 24 subjects with unilateral trans-radial deficiencies (left or right side affected) of both genders. 16 In addition, there are some differences between the two measurement protocols, but these are not expected to have a significant influence.
As hypothesized, the FV was significantly different between force levels. Here, the post hoc analyses showed significant differences for all combinations of force levels. The increasing FV with increasing target forces implies that users can stabilize a pinch force exerted on an object better at low operation forces.
Anchor system
The overall force perception and control of both systems are comparable, making the Anchor System a possible alternative to the traditional harness. Still, some practical questions remain. One subject remarked that attaching the Anchor System might prove difficult on your own. The inventor, Debra Latour, explained in an email conversation (20 October 2016) that an assistive mounting device can be used to place the Anchor System on one’s back if it is not within the individual’s normal range of motion.
Additionally, while the direct skin contact was overall thought to be beneficial for transmitting force information at low force levels, one subject expressed the concern that the Anchor System might feel really uncomfortable at higher force levels. Regardless of whether the Anchor or harness system is used, we believe that excessively high operation forces should be avoided not only to decrease FRE and FV but also to minimize fatigue and discomfort caused by repetitively exerted high operation forces. 21 Furthermore, the Anchor System is not feasible for users who are allergic to adhesive substances. To minimize this concern, medical-grade hypo-allergenic tape is used to connect the Anchor to the skin. Alternatively, other latex-free products could be used instead of the current adhesive, according to Latour.
Study limitations
Due to the limited availability of prosthesis users, the subject population of this study consisted only of able-bodied individuals. However, the magnitude of FRE and FV is consistent with the values found for subjects with trans-radial deficiency. 16
The examined force levels of this study were limited to 40 N. Hence, the perception and control differences between the two systems at higher operation forces cannot be concluded based on this study.
The force reproduction experiments aim to simulate short and intensive prosthesis use, but remain different from daily prosthesis operation. The attained freedom of the contralateral side with the Anchor System and reduced discomfort of the armpit through elimination of the straps altogether might be beneficial during daily activities. The resulting advantages or disadvantages in terms of cosmesis, comfort, or control have not been quantified here and would require further attention.
Conclusion
The aim of this study was to compare force perception and control with the figure-of-nine harness versus the Ipsilateral Scapular Cutaneous Anchor System. A force reproduction task was used to investigate force perception and control for various relevant (daily use) force levels. The metrics of FRE and FV revealed no differences between the two systems. Furthermore, force perception and control abilities improved with decreasing force levels. Our advice is to consider the Anchor System for body-powered prosthesis operation, particularly at low operation forces, since its performance is comparable to the harness and it offers increased cosmetic value and comfort.
Footnotes
Author contribution
Study concept, design, acquisition of data, analysis and interpretation of data, and drafting of manuscript—Mona Hichert.
Study concept, design, critical revision of manuscript for important intellectual content, study supervision, and obtained funding—Dick H. Plettenburg.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by Fonds NutsOhra (grant number 1101-049).