
Abstract
This paper presents a deep analysis of a novel method entitled Dhouib-Matrix-SPP-24 (DM-SPP-24) and its application to rapidly generate the shortest trajectory for an autonomous mobile robot. For this problem, the environment is represented by a grid map where several obstacles are exposed with static positions and the main objective is to plan the shortest trajectory for an autonomous mobile robot from the current to the target positions with obstacles free-collisions. This study introduces an in-depth exploration of the twenty-four movement directions of the DM-SPP-24 method, an application on six grid maps and a comparison to several recent metaheuristics taken from the literature (such as the Improved Ant Colony Algorithm, the enhanced Ant Colony Optimization with Gaussian Sampling, the Particle Swarm Optimization, the Genetic Algorithm and other methods). Indeed, a new method namely DM-SPP-24 is introduced and this study notes an improvement in the quality and the rapidity of the generated solution by DM-SPP-24 versus the solution produced by the recent published metaheuristics in the literature. This work serves as a valuable resource for robotics and path planning viewing that it introduces a very fast and accurate method (DM-SPP-24) to plan the trajectory of an autonomous mobile robot.
This is a visual representation of the abstract.
Keywords
Introduction
Recent researches have made significant strides in planning the shortest path for an autonomous mobile robot with avoiding obstacles. For example, an advanced version of the A star method is studied to solve the path planning problem. 1 A modified version of the Particle Swarm Optimization (PSO) metaheuristic namely spherical vector-based PSO is designed to plan the trajectory for unmanned aerial vehicles. 2 An enhanced version of A star method based on reducing the number of turning points in a nuclear radiation environment is developed. 3 An enriched Ant Colony Optimization metaheuristic with constraint on angle is designed for the path planning problem.4,5
In addition, a new collaborative method is developed to trace a trajectory for a 3-wheel omnidirectional cognitive mobile robot. 6 A novel combined metaheuristic based on the Whale Optimization algorithm and Firefly method to plan collision-free trajectory planning for a mobile robot. 7 Besides, the Pelican Optimization Algorithm is studied to create the shortest path, 8 the Firefly metaheuristic is applied, 9 the Ant Colony Optimization method, 10 the PSO metaheuristic is integrated with the Grey Wolf algorithm 11 and an enhanced Ant Colony Optimization metaheuristic is studied. 12
In addition, an optimal method namely Dhouib-Matrix-SPP (DM-SPP) is designed to solve the shortest path problem for any graph. 13 Hence, DM-SPP is extended to plan the trajectory of a mobile robot with only eight movement directions.14,15 Moreover, DM-SPP is enhanced to work with four movement directions (entitled DM-SPP-4). 16 All DM-SPP methods are simulated on several case studies with different complexities and compared to diverse artificial intelligence methods recently developed in the literature.
The main objective of this paper is to adapt the novel DM-SPP method to work with twenty-four movement directions in a square-grid environment and static obstacles: The proposed method is entitled Dhouib-Matrix-24 (DM-SPP-24). Indeed, the innovative technique DM-SPP-24 is introduced and simulated on the autonomous mobile robot short path problem and the key finding includes:
A novel artificial intelligence optimization technique is introduced to plan the trajectory for an autonomous mobile robot with obstacles free-collision. twenty-four movement directions are used by the proposed DM-SPP-24 method which means a minimal deviation degree of 22.5° is allowed. DM-SPP-24 is simulated on a set of a case studies and compared to several artificial intelligence methods. The feasibility, rapidity and accuracy of DM-SPP-24 is conformed and it can be concluded that DM-SPP-24 goes behind the last artificial intelligence methods developed in the literature (for example, concerning the three complicated case studies, DM-SPP-24 is (104.85) rapider than the enhanced Ant Colony Optimization with Gaussian Sampling, (130.11) faster than the Particle Swarm Optimization and (143.04) rapider than the Genetic Algorithm.
The remainder of this paper is summarized as follows: In the second section the mobile robot environment is introduced follows by a third section to present the proposed DM-SPP-24 method. The experimental results are illustrated in the fourth section and finally a conclusion with the projected perspectives is generated in the fifth section.
The grid environment model
The grid environment model is applied to represent the real space thanks to its simplicity and robustness to model the obstacles and the free spaces (see Figure 1.a). This model is based on subdividing the real spaces on small squares where the obstacles are codified by “0” with a red color and the free spaces are represented by a white color with “1” digit. In addition, each element in the grid map (square) is identified with a unique address (for identification) using the Cartesian coordinate system in the grid matrix (see Figure 1.b).

The grid map model a) the grid map b) the grid matrix.
In this paper, for each current position (except the element on the corner) there are twenty-four movement directions (see Figure 2). Thus, the minimal deviation degree will be 22.5° then 45°, … etc. Indeed, these twenty-four movements will be used to create the contingency matrix with the corresponding distances:

The possible twenty-four movement directions for the current position.
The proposed DM-SPP-24 method
In 2021, we invented a new artificial intelligence optimization concept entitled Dhouib-Matrix (DM) where several heuristics, metaheuristics and optimal techniques are designed. For example, to solve the Assignment Problem two new heuristics (the DM-AP1 and the DM-AP2) are respectively designed17,18; to unravel the Travelling Salesmen Problem two novel greedy techniques (the DM-TSP1 and the DM-TSP2) are developed19–23 and to optimize the Transportation Problem the DM-TP1 method is invented.24,25
Moreover, an innovative DM3 metaheuristic is developed26–28 and an original DM4 method is studied.29–32 In addition, the DM-MSTP optimal method is introduced to solve the Minimum Spanning Tree Problem,33,34 the DM-ALL-SPP method is proposed to create the shortest path between all vertices 35 and DM-SPP is proposed to solve the Shortest Path Problem. 13 DM-SPP is enhanced for a mobile robot with eight movement directions,14,15 then tested for four movement directions entitled DM-SPP-4, 16 and in this manuscript it is adapted to work with twenty four movement directions entitled DM-SPP-24. The general flowchart of DM-SPP-24 is illustrated in Figure 3.

The flowchart of the DM-SPP-24.
Basically, DM-SPP-24 can be used for any kind of robot able to use twenty-four movement directions. It starts by converting the environment of the mobile robot to a grid matrix (see the image after Step 1 in Figure 4) where the obstacles are codified by 0 (red squares) and the empty spaces are represented by 1 (blue squares). Then, for each element in the grid map twenty-four neighbors are used to create the contingency matrix (see the images after Step 2 and Step 3). Following, the shortest plan is created based on the contingency matrix (see the illustrated path after Step 4 in Figure 4) and projected on the environment (Step 5).

The main steps of the proposed method DM-SPP-24.
Indeed, DM-SPP-24 is an enriched version of DM-SPP where twenty-four movement directions are proposed. DM-SPP-24 is validated through six experimental environments: In the three first case studies, the grid map is represented by a 20 × 20 model maps, and, in the remainder, case studies the grid maps are modeled as 30 × 30 models. In addition, the performance of DM-SPP-24 is confirmed through its comparison to different existing metaheuristics (such as the Traditional Ant Colony Algorithm, the Improved Ant Colony Algorithm, the Genetic Algorithm, the PSO, … etc.). The DM-SPP-24 offers a more efficient solution with a shortest computational time, it demonstrates rapidity.
Simulations experiments and results analysis
The proposed DM-SPP-24 is simulated on a Dell Laptop using processor Intel ® Core ™ I7-1255U, main frequency 1.7 GHz, memory 16 Go with Windows 10 Professional and Python programming language. In this section, two sets of grid maps are used: (i) The simple case studies, composed of three 20 × 20 grid maps and (ii) The complicated case studies composed of three 30 × 30 grid maps. Indeed, DM-SPP-24 is simulated on these six grid maps and its results are compared to results generated by the recent developed metaheuristics in the literature
36
:
The Traditional Ant Colony Optimization (T-ACO), The enhanced Ant Colony Optimization with Gaussian Sampling (S-IACO), The Improved Ant Colony Algorithm (OMV-ACO), The Particle Swarm Optimization (PSO), The Genetic Algorithm (GA).
Moreover, two criteria are analyzed separately to prove the performance of DM-SPP-24 on accuracy and rapidity: (i) the accuracy is the percentage reduction in path length (distance) compared to DM-SPP-24 (see Eq. 1) and (ii) the rapidity in running time (CPU) compared to DM-SPP-24 (see Eq. 2).


Simple case studies
In this subsection, three 20 × 20 grid maps (Map 1, Map 2 and Map 3) are considered.
Map 1 (20 × 20 grid map)
The first case study is represented by a 20 × 20 grid map with several obstacles where the starting position is at the up left corner and the target position is at the down right corner. DM-SPP-24 plans the trajectory (see the blue waypoint in Figure 5) with a path length of (28.38) after only (0.03) second.
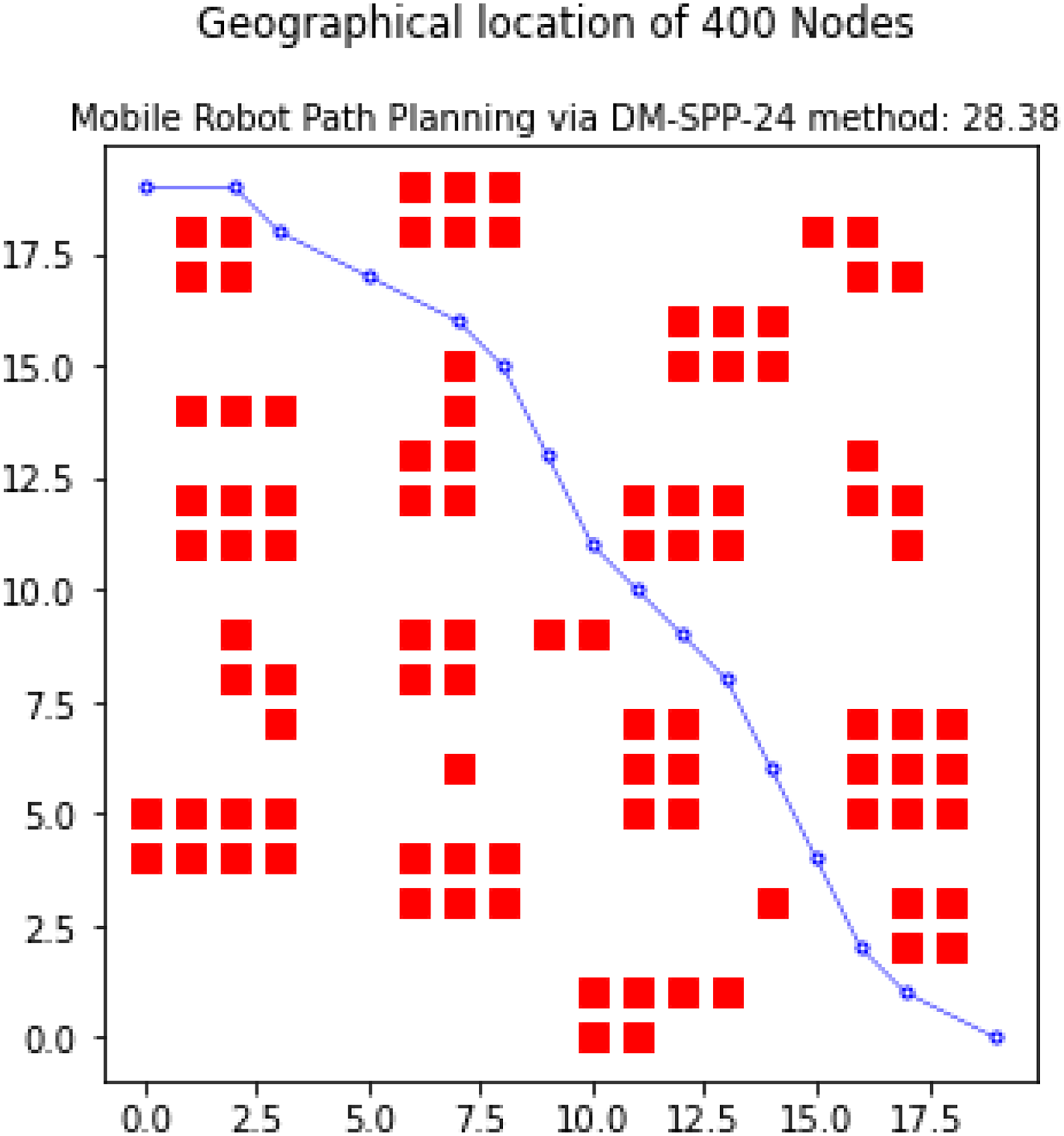
The trajectory generated by DM-SPP-24 for Map 1.
Table 1 summarizes the results generated by DM-SPP-24 and the last developed metaheuristics. It can be seen from this table that DM-SPP-24 is the best method. In terms of quality of the solution, DM-SPP-24 is the most accurate method with (5.07%) reduction in length to the OMV-ACO, IACO, T-ACO and S-IACO. In terms of rapidity, DM-SPP-24 is (291.33) times rapider than T-ACO, (166.00) times rapider than OMV-ACO, (185.00) times rapider than IACO and (119.33) rapider than S-IACO.
The results on Map 1.
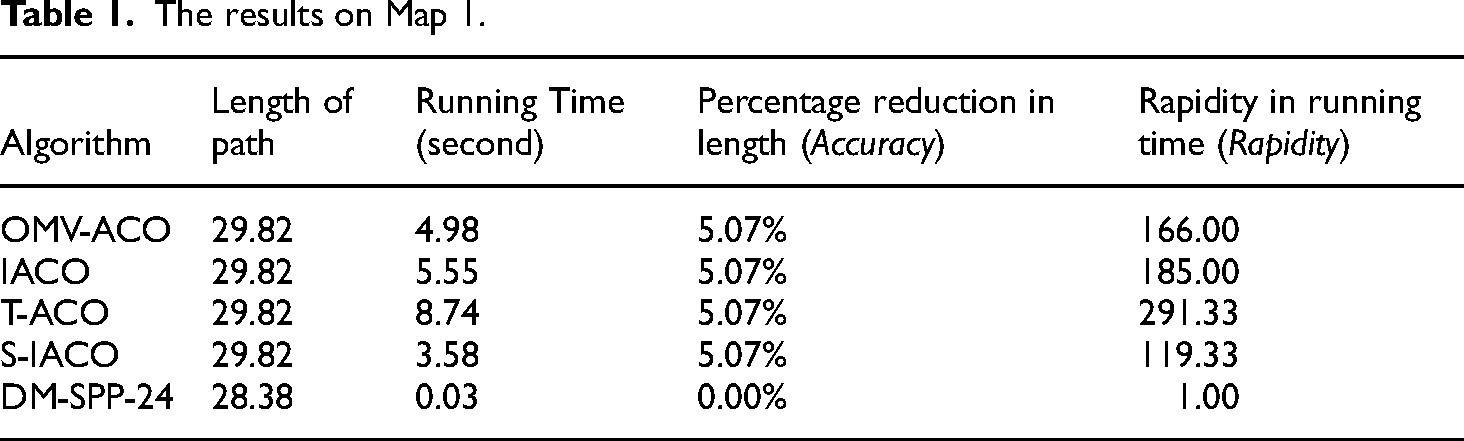
Table 1 summarizes the results of the proposed DM-SPP-24 method and other artificial intelligence methods from the literature on Map 1.
From the above experiments, it can be seen that the fourth artificial intelligence methods in the literature are very slow compared to the proposed DM-SPP-24 method. To sum up, Figure 6 depicts the variation in running time (rapidity) and it can be concluded that the performance of DM-SPP-24 is better than the other five metaheuristics.

Comparing the rapidity of the proposed DM-SPP-24 method to other recent artificial intelligence methods on Map 1.
Map 2 (20 × 20 grid map)
The second case study is composed of 20 × 20 grid map. Figure 7 illustrates the solution created by DM-SPP-24 with a path length of (29.14) generated just in (0.03) second.

The trajectory generated by DM-SPP-24 for Map 2.
As it can be seen from Table 2, the performance of the proposed DM-SPP-24 is still better than the other metaheuristics developed in the literature. In terms of rapidity in running time, DM-SPP-24 is (176) times faster than OMV-ACO, (149.33) times faster than IACO, (255.33) rapider than T-ACO and (117.33) rapider than S-IACO. In terms of path length, the DM-SPP-24 is (4.22%) better than OMV-ACO, IACO, T-ACO and S-IACO.
The results on Map 2.

Figure 8 depicts the rapidity (running time) of all methods compared to DM-SPP-24.

Comparing the rapidity of the proposed DM-SPP-24 method to other recent artificial intelligence methods on Map 2.
Map 3 (20 × 20 grid map)
The third case study is composed of a 20 × 20 grid map. DM-SPP-24 generates the trajectory (see the blue waypoint in Figure 9) with a path length of (28.97) after only (0.03) second.
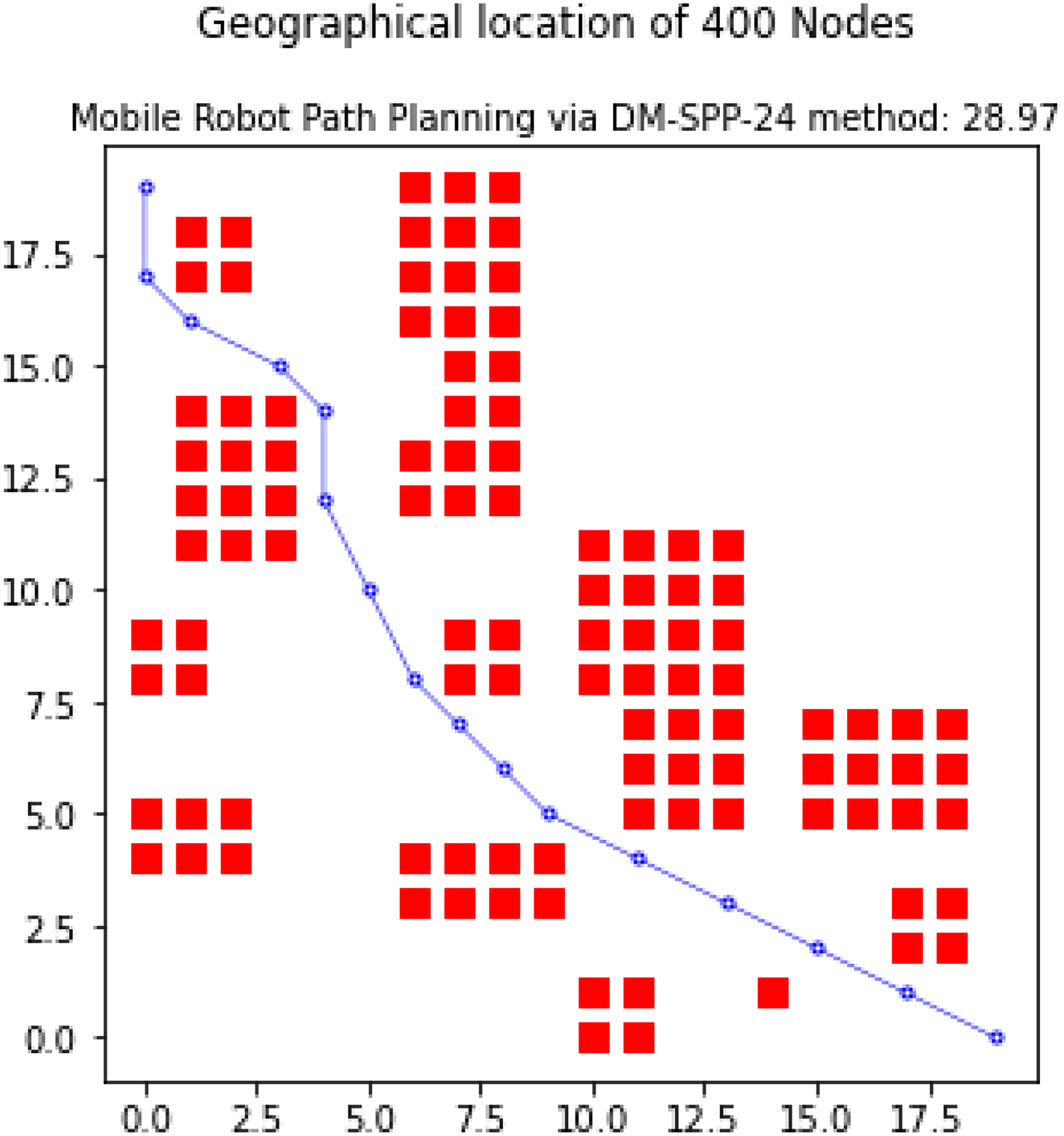
The trajectory generated by DM-SPP-24 for Map 3.
It can be seen from Table 3 that the proposed DM-SPP-24 has more advantages than the last developed metaheuristics in the literature. In terms of rapidity, DM-SPP-24 is (16.67) times rapider than OMV-ACO, (136.33) times faster than IACO, (218.00) times rapider than T-ACO and (122.00) times rapider than S-IACO.
The results on Map 3.

Among the five artificial intelligence methods, the DM-SPP-24 method is the best in trajectory length and running time. Figure 10 illustrates the rapidity (running time) of all methods compared to DM-SPP-24.

Comparing the rapidity of the proposed DM-SPP-24 method to the other recent artificial intelligence methods on Map 3.
To summarize, DM-SPP-24 is applied on three simple 20 × 20 grid maps and compared to recent published metaheuristics (T-ACO, IACO, OMV-ACO and S-IACO). Obviously, the proposed DM-SPP-24 can rapidly plan a shorter path (for the three maps) than the novel developed metaheuristics. Moreover, DM-SPP-24 is a very rapid technique compared to all the other methods (see Figure 11).

Comparing the rapidity of the recent developed metaheuristics to the proposed DM-SPP-24 method on 20 × 20 maps.
Complicated case studies
In order to confirm the performance of DM-SPP-24, it is applied on three other complicated 30 × 30 grid maps.
Map 4 (30 × 30 grid map)
The Map 4 is composed of 30 × 30 grid map gathering several obstacles where the starting position is at the up left corner and the target position is at the down right corner. The result generated by DM-SPP-24 for Map 4 is illustrated in Figure 12 where the trajectory length is (44.25) and generated after (0.09) second.

The trajectory generated by DM-SPP-24 for Map 4.
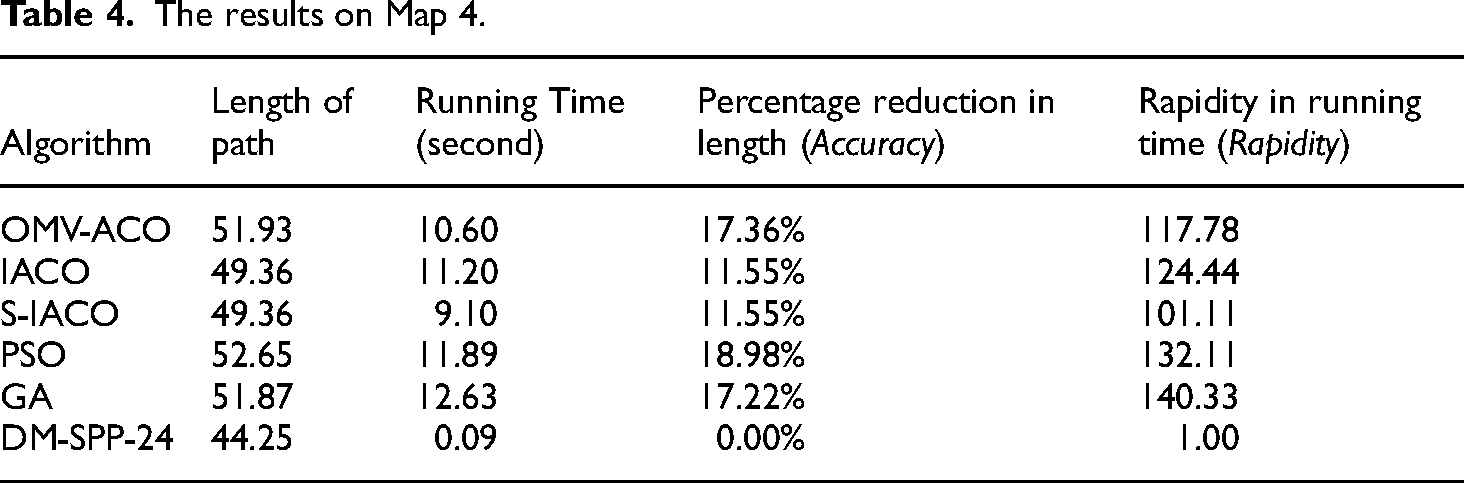
The results found by several metaheuristics developed in the literature and DM-SPP-24 are shown in Table 4. More again, DM-SPP-24 is still the best method. In terms of accuracy, DM-SPP-24 is (17.36%) better than OMV-ACO, (11.55%) shorter than IACO and S-IACO, (18.98%) more precise than PSO and (17.22%) better than GA. In terms of rapidity, DM-SPP-24 is (117.78) times rapider than OMV-ACO, (124.44) times faster than I-ACO, … etc.
The results on Map 4.
The rapidity of DM-SPP-24 compared to the other metaheuristics is illustrated in Figure 13.

Comparing the rapidity of the proposed DM-SPP-24 method to the other recent artificial intelligence methods on Map 4.
Map 5 (30 × 30 grid map)
The environment of Map 5 is represented by a 30 × 30 grid map. DM-SPP-24 generates the trajectory (see Figure 14) with a path length of (43.92) after just (0.09) second.

The trajectory generated by DM-SPP-24 for Map 5.
Table 5 gathers the results generated by DM-SPP-24 and the last developed metaheuristics. It can be seen that DM-SPP-24 is the best method. In terms of quality of the solution, DM-SPP-24 is the most accurate method with (14.94%) reduction in length to the OMV-ACO, (17.37%) better than IACO, (12.39%) more precise than T-ACO, …, etc. In terms of rapidity, DM-SPP-24 is (120.00) times rapider than T-ACO, (117.44) times faster than IACO, … etc.
The results on Map 5.

Obviously, the DM-SPP-24 method is the best in trajectory length and running time (see Figure 15).
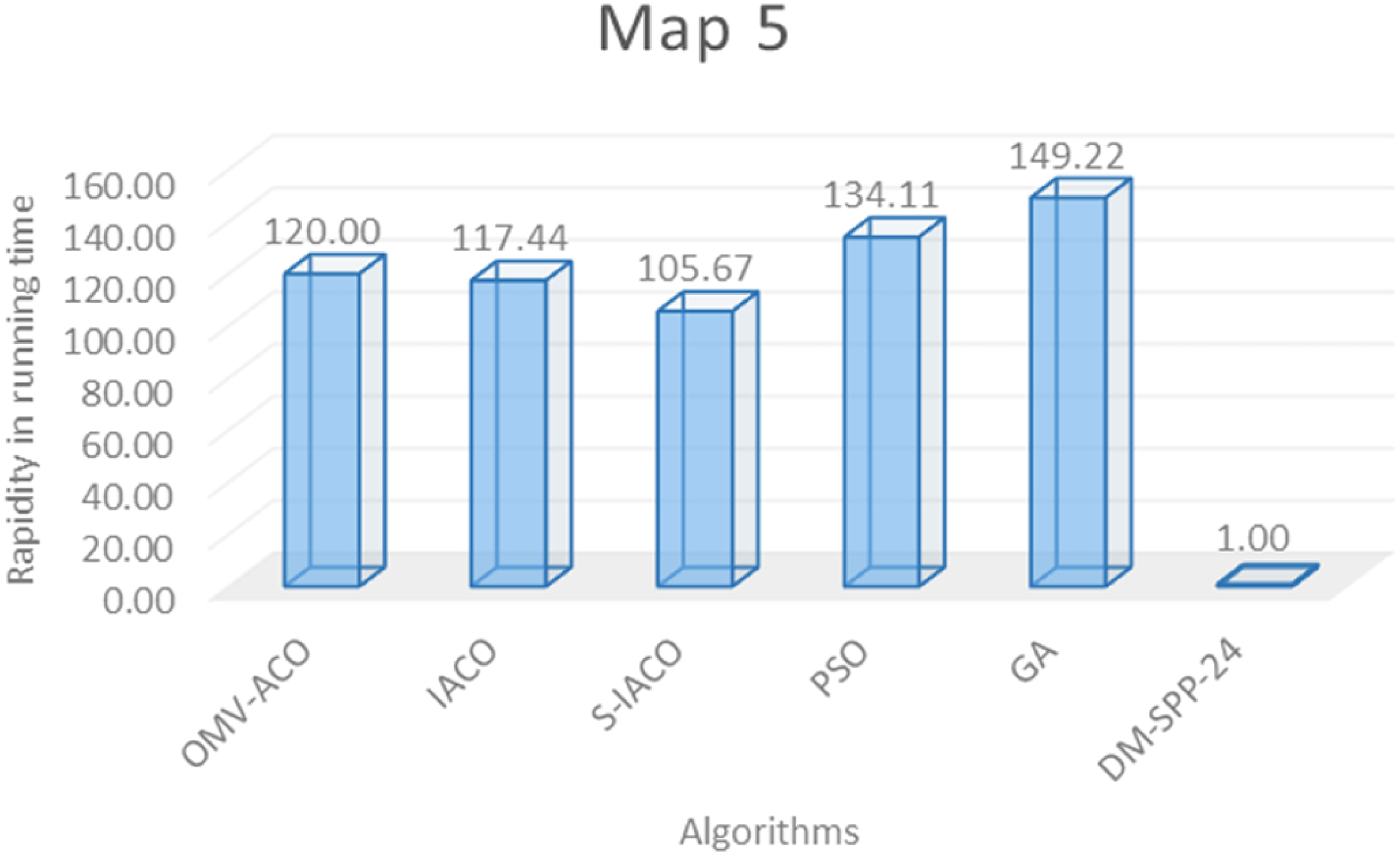
Comparing the rapidity of the proposed DM-SPP-24 method to the other recent artificial intelligence methods on Map 5.
Map 6 (30 × 30 grid map)
Finally, Map 6 is composed of a 30 × 30 grid map and DM-SPP-24 rapidly plans the shortest path (see the blue waypoint in Figure 16) with a distance of (42.57) after only (0.09) second.

The trajectory generated by DM-SPP-24 for Map 6.
It can be seen from Table 6 that DM-SPP-24 outperforms the other metaheuristics. In terms of accuracy DM-SPP-24 generates the shortest trajectory with an improvement of (28.33%) to the GA. Also, in terms of rapidity, DM-SPP-24 is the fastest method with a huge deviation (for example DM-SPP-24 is (124.11) times rapider than PSO).
The results on Map 6.
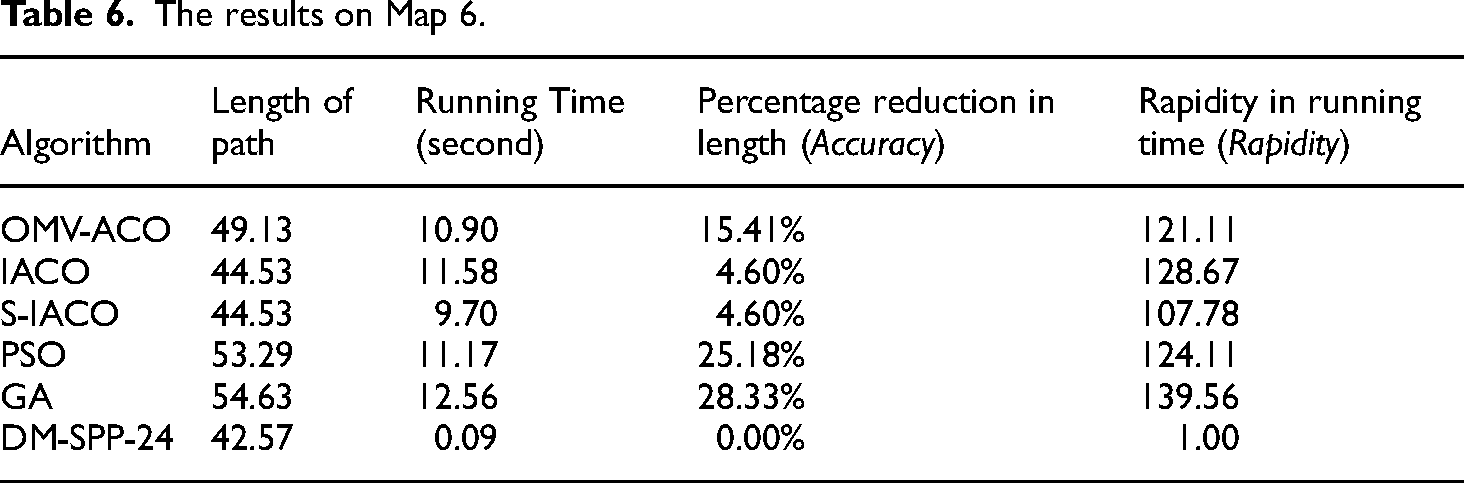
Among the five artificial intelligence methods, the DM-SPP-24 method is the best in trajectory length and running time (see Figure 17). Moreover, DM-SPP-24 is a deterministic method which allows a stability and rapid operation for the mobile robot.

Comparing the rapidity of the proposed DM-SPP-24 method to the other recent artificial intelligence methods on Map 6.
To conclude this subsection, DM-SPP-24 is applied on three complicated 30 × 30 grid maps and the simulation results confirm the efficiency of DM-SPP-24 to rapidly generate shortest path. DM-SPP-24 is compared to the last developed metaheuristics (PSO, GA, IACO, … etc.) based on two criteria (percentage reduction in length and rapidity in running time) and clearly DM-SPP-24 is the fastest and most accurate method. Indeed, DM-SPP-24 for the three grid maps (Map 4, Map 5 and Map 6) presents an average percentage deviation (%DEV) improvement of (23.40%) to GA, (21.45%) to PSO, (15.90%) to OMV-ACO, (11.17) % to IACO and (9.51%) to S-IACO (see Figure 18.a). Moreover, the rapidity of DM-SPP-24 is compared to the recent metaheuristics in the literature and as you can see from Figure 18.b DM-SPP-24 goes behind all the recent developed methods.

Comparison of the recent developed metaheuristics to DM-SPP-24 method on three 30 × 30 maps.
Finally, the proposed method DM-SPP-24 is compared on six grid maps to different recent developed metaheuristics (PSO, GA, IACO, … etc.) and for all these case studies DM-SPP-24 generates the shortest trajectory with the minimum running time. Actually, DM-SPP-24 presents on the one hand an improvement to the trajectory quality (shortest path) and on the other hand an acceleration in the planning process (fastest method).
The fastness of DM-SPP-24 can be explained by its deterministic structure and its versatility for no requirement of parameters which marks a notable improvement over the existing artificial intelligence methods. Nevertheless, it is important to recognize some convinced limitations of DM-SPP-24 and potential areas for enhancement: DM-SPP-24, is tested on a 2D grid map environment with obstacles in static (fixed) positions and does not take into account neither the 3D grid map environment nor the obstacles in a dynamic context. In the future, these limitations can be nicely tackled by the extension of movement directions with a third axis and easily handling just in time the obstacle avoidance.
Conclusion
The paper addresses the mobile robot shortest path problem with a design of an innovative method named DM-SPP-24. This novel method is derived from the rapid DM-SPP with an enhancement of twenty-four movement directions, intending to minimize the path distance. A significant innovation of DM-SPP-24 is its extinction to explore further neighbor positions from the current one. The feasibility, rapidity, and accuracy of DM-SPP-24 are confirmed through a series of simulations on different case studies with a comparison to several artificial intelligence methods developed in the literature (for example, DM-SPP-24 presents an average percentage deviation improvement of (23.40%) to the Genetic Algorithm, (21.45%) to the PSO and (15.90%) to The Improved Ant Colony Algorithm). Despite the contributions of DM-SPP-24 to plan shortest path, the autonomous mobile robot could benefit from the rapidity of DM-SPP-24: the simulation results prove that DM-SPP-24 goes behind all the last developed metaheuristics (for example, concerning the three complicated case studies, DM-SPP-24 is (104.85) rapider than the enhanced Ant Colony Optimization with Gaussian Sampling, (130.11) faster than the PSO and (143.04) rapider than the Genetic Algorithm). The future research directions will focus on the application of DM-SPP-24 to plan the shortest secured path for a cognitive mobile robot in a pandemic environment or in three-dimensional environment. In addition, the study of the novel DM-SPP-24 method to plan the shortest path for a cognitive mobile robot under multi-objective domain or its application for articulated robot with two parts (the tractor and the tailer) will be fruitful perspective.
Footnotes
Author contribution
Souhail Dhouib is the sole author. He designed and developed the framework. He also wrote the manuscript and interpreted and discussed the results.
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author received no financial support for the research, authorship, and/or publication of this article.