
Abstract
To improve the performance of the PID controller for a steel strip deviation control system (SSDCS), an enhanced artificial bee colony algorithm (EABC) is proposed to optimize PID controller gains (EABC-PID). The proposed EABC changes the candidate solution equation to balance its explorative and exploitative capabilities. The experiment presents a detailed comparison of EABC-PID and four bio-inspired algorithms based PID controllers considering four types of objective functions. Simulation results show that EABC-PID proves to be superior for SSDCS compared to four bio-inspired algorithms based PID controller in terms of convergence, dynamic adjustment, and robustness.
Keywords
Introduction
Steel strip deviation is an unavoidable phenomenon in the strip steel production process since it brings a lot of failures and inconvenience to the steel strip production. On the one hand, it may cause steel strip to bend or to rub and collide with the edge of rolls, which seriously affects the normal production and damages unit equipment, or even causes the steel strip to break, posing a threat to the workshop staff; On the other hand, it will affect the processing accuracy and quality of steel strip, resulting in higher production costs and steel waste. Therefore, control of the deviation is an important issue that needs to be urgently addressed.
A steel strip deviation control system (SSDCS) is widely used to adjust the position of steel strips. The SSDCS is mainly composed of a position sensor, a controller, an electro-hydraulic servo valve, a hydraulic cylinder, a rack, and a hydraulic station, shown in Figure 1. When the steel strip is not of deviation, it is in the center of the position sensor. If the strip is of deviation, a position deviation signal will be detected by the position sensor and transmitted to the controller, which will output a control current to the electro-hydraulic servo valve after analysis of the controller. According to the control current, the electro-hydraulic servo valve will drive the hydraulic cylinder pushing the rack to adjust the position of the strip.
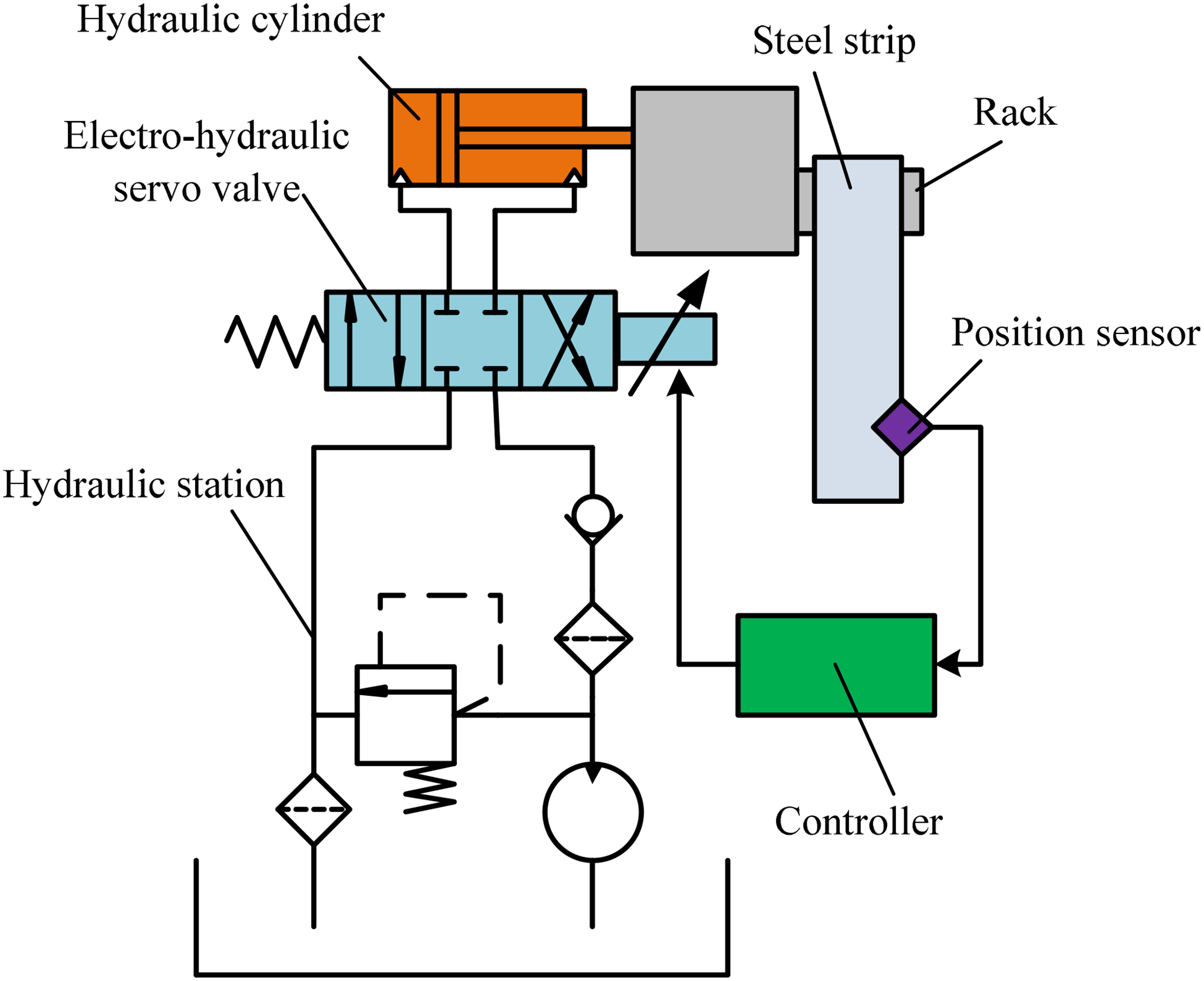
Configuration of the steel strip deviation control system.
It is difficult to establish a precise mathematical model for the SSDCS because of its nonlinearity and time-variable parameters,1,2 so determining the optimal control strategy for the SSDCS is still a major concern for a significant amount of studies. Traditional PID controller is often used in the SSDCS, 3 but it is difficult to meet the requirements for high precision and speed. 4 To further improve the control performance of the PID controller, many PID controllers that combine with intelligent methods such as PID - neural network 5 and PID – sliding mode control 6 have been proposed for investigating and controlling the SSDCS.
Bio-inspired optimization algorithms, such as bacterial foraging (BF), genetic algorithms (GA), differential evolution (DE), particle swarm optimization (PSO), future search algorithm (FSA) etc., have been developed for optimizing PID parameters in recent years.7–12 They use their respective adjustment mechanisms to search for the optimal (global) solution of a given problem in parallel throughout the search space. Generally, a population consists of a large number of candidate solutions. Then the candidate solutions are adjusted to generate new progeny populations with better performance than the current generation. This process continues until the stopping criterion is met.
The artificial bee colony (ABC) algorithm is also one of the bio-inspired optimization algorithms firstly proposed by Karaboga. 13 ABC algorithm has shown its outstanding performance on various kinds of practical problems, due to its ease in structure, implementation followed by well-organized exploitation and exploration mechanisms. 14 Based on the ABC algorithm, many applications including wireless sensor networks, 15 big data, 16 image processing, 17 deep learning, 18 etc., have been successively developed. ABC remained to be the best contender for existing bio-inspired optimization algorithms. A comprehensive view of recent developments and real-world applications can be found in the literature. 19
Several ABC algorithms have been utilized for optimizing PID gains as specified by the literature.20–22 However, in general, prior ABC algorithms for optimizing PID parameters take no consideration of the robustness. In addition, the ABC algorithm based PID controller for the SSDCS has rarely been reported. In summary, some of the contributions of this paper are as follows:
EABC-PID controller is proposed and applied to solve the control performance problem of the SSDCS. Comparison is made among EABC-PID controller, ABC-PID controller, PSO-PID controller, DE- PID controller and GA-PID controller. Investigation is performed to verify the robustness of the proposed controller.
The rest of the paper is organized as follows. In Section ‘The SSDCS model’, the SSDCS model is presented in detail. In Section ‘ABC algorithm based PID controller design’, we first introduce the basic concept and some central components of the ABC algorithm, and then based on this algorithm a complete design guideline of the PID controller is presented for the SSDCS. Section ‘Simulation and discussion’ will show various tests for a proposed controller and some simulation comparisons with the other controllers are also given. Finally, a brief conclusion is addressed in Section ‘Conclusion’.
The SSDCS model
The design of stabilizing controllers used in the SSDCS has been extensively studied in recent years. The objective of the controller is to keep the position of the steel strip following the desired position as precisely as possible. To design an effective control strategy for the SSDCS, it is necessary to establish the SSDCS model.
The block diagram of the SSDCS is shown in Figure 2. In the Figure,

Block diagram of the SSDCS.
The following assumptions need to be made when building the electro-hydraulic servo valve model: the electro-hydraulic servo valve is a three-way four-way valve; the inherent frequency of the electro-hydraulic servo valve is close to the inherent frequency of the hydraulic system. The electro-hydraulic servo valve can be approximated as a first-order transfer function:
23

The following assumptions need to be made when modeling the hydraulic cylinder: the hydraulic fluid source is at constant pressure; the hydraulic servo valve is a zero-opening accurate centering valve; leaks and the effect of leaks on the system are ignored. The hydraulic cylinder can be approximated as a second-order transfer function.
24

Without considering the PID controller, the closed-loop transfer function of SSDCS can be expressed as follows



ABC algorithm based PID controller design
The SSDCS's ABC algorithm-optimized PID (ABC-PID) control schematic description is demonstrated in Figure 3. From Figure 3, the ABC-PID includes three parts: ACB algorithm, objective function, and PID controller. The following section describes the basic ABC algorithm, the objective function, and the ABC-PID controller.

SSDCS's ABC-optimized PID control scheme.
Basic ABC algorithm
In the framework of the artificial bee colony algorithm, the location of the food source represents the possible candidate solutions of the problem to be optimized, the number of nectar in the food source represents the fitness corresponding to the candidate solutions; and the size of the bee colony is equal to the number of solutions. The basic structure of the ABC algorithm can be divided into the following four stages:
Initial stage: ABC algorithm randomly generates a matrix

Employed bee stage: An employed bee is to modify and generate a new candidate solution based on the currently collected information, as well as to calculate its fitness. If the fitness of the new candidate solution is higher than the fitness of the original candidate solution, the new candidate solution replaces the original candidate solution; otherwise, the original candidate solution is retained. After all employed bees complete the search task; they share the information on the location of the food source (candidate solution) and the amount of nectar (fitness) they found with onlooker bees. The new candidate solutions are generated by


Onlooker bee stage: onlooker bees assess the fitness of candidate solutions passed from the employed bee, and then select food sources based on the probability corresponding to the amount of nectar. In this case, the onlooker bee updates the candidate solution based on the original candidate solution and calculate its fitness, if the fitness of the new candidate solution is higher than the original candidate solution, the new candidate solution replaces the original candidate solution; otherwise, the original candidate solutions are retained. The probability of a food source chosen by an onlooker bee can be calculated by

Objective functions
A key step in applying optimization methods is the selection of objective functions that estimate the fitness value. The optimal gains of the PID controller are obtained by minimizing the objective functions which are given by equation (10)–(13).




Where ITSE is the integral of time multiplied by squared error, ISE is the integral of the squared error, ITAE is the integral of time multiplied by absolute error, IAE is the integral of absolute error, E(t) is the control system error.
Proposed controller
The basic ABC algorithm is good at exploration but badly in exploitation. 25 Therefore, an enhanced ABC algorithm (EABC) is used to balance explorative and exploitative for optimizing the PID controller gains.
To ensure better development and utilization of nectar source, the global NS operator derived from DNSPSO
26
is introduced to the basic ABC algorithm in the stage of employed bees and onlooker bees. The candidate solutions are randomly generated by

It is necessary to point out that r1, r2, and r3 are generated anew in each generation, but they are kept the same for all dimensions in each generation. Once the trial solution is generated, its associated food source has to compete with it for entering the next generation. It implies that the one with a better fitness value has the chance to survive. The pseudo-code of the EABC algorithm optimizing PID controller gains (EABC-PID) is given in Table 1.
Pseudo code of EABC algorithm optimizing PID controller gains.

Simulation and discussion
To verify the effectiveness of the proposed EABC-PID controller for SSDCS, simulation experiments were conducted in terms of convergence, dynamic adjustment, and robustness, respectively, and each simulation experiment was run 30 times independently. The parameters of the SSDCS are as follows:
Convergence simulation
To illustrate the convergence, equation (10)–(13) are used as objective functions. In addition, the basic ABC-PID, the PSO-PID, the DE-PID, and the GA-PID are employed to compare with the EABC-PID. Although, numerous ABC improvement algorithms or some related intelligent optimization methods are currently mentioned in the literature. Given the research focus of this paper and the limitation of space, they are not repeated here. The parameters of the EABC-PID, the basic ABC-PID, the PSO-PID, the DE-PID, and the GA-PID are shown in Table 2. Before the comparison, the parameter settings of each algorithm have been optimal by comparing different parameter settings.
Parameters for five controllers.

Figures 4–7 shows the convergence curve of four objective functions under unit step input. The convergence ability of the five controllers can be visually analyzed by Figure 4. From Figure 4, the EABC-PID has a better optimization effect than the basic ABC-PID, the PSO-PID, the DE-PID, and the GA-PID. This further shows that the idea of improving the optimization performance of the EABC-PID by improving the generation equation of the candidate solution of the basic ABC is feasible, and the simulation experimental results achieve the expected goal. The experimental results illustrate that the EABC-PID controller can give better kp, ki, kd than other controllers with the objective functions of ITSE, ISE, ITAE, and IAE.
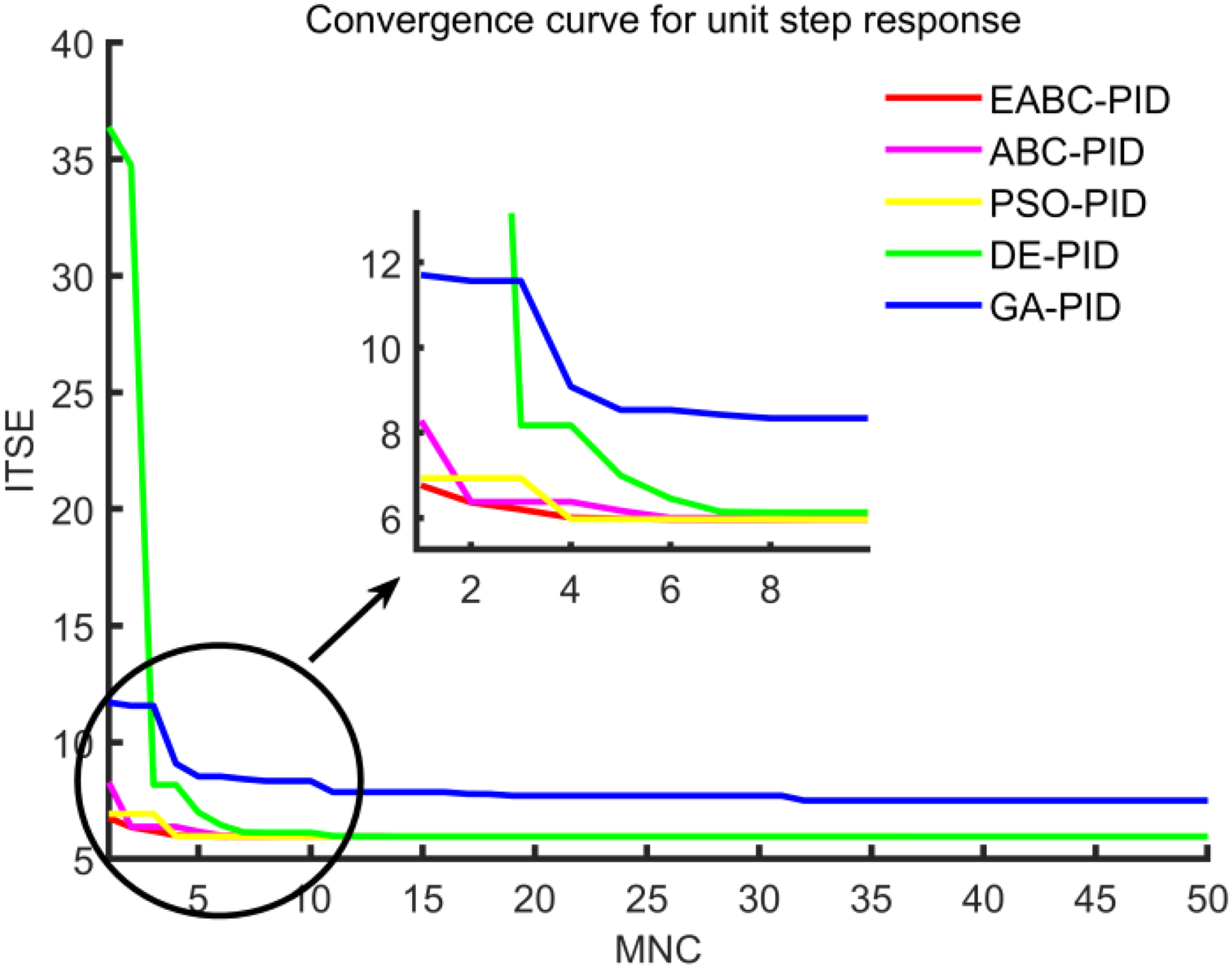
Convergence comparison of ITSE for unit step response.

Convergence comparison of ISE for unit step response.
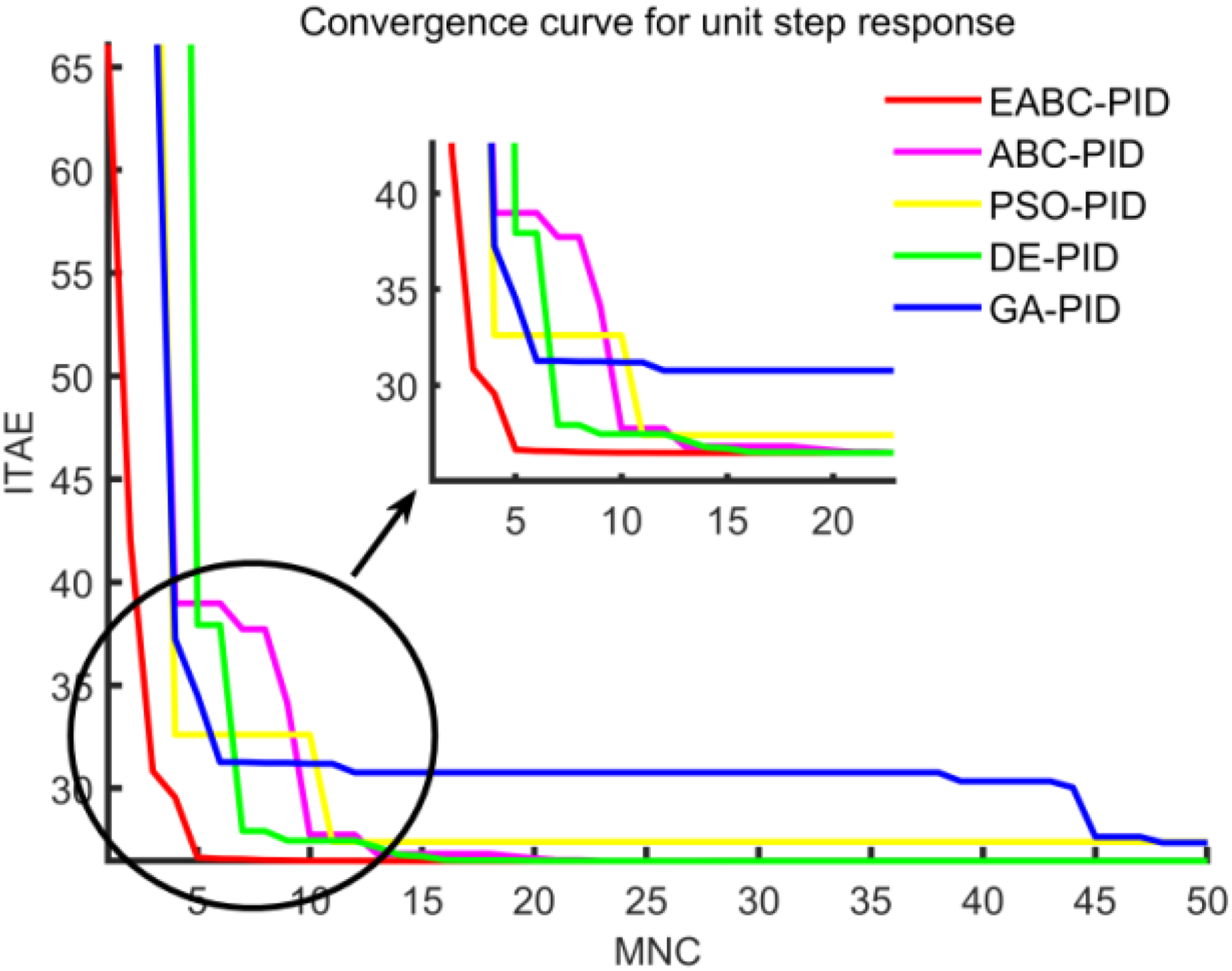
Convergence comparison of ITAE for unit step response.

Convergence comparison of IAE for unit step response.
Dynamic adjustment simulation
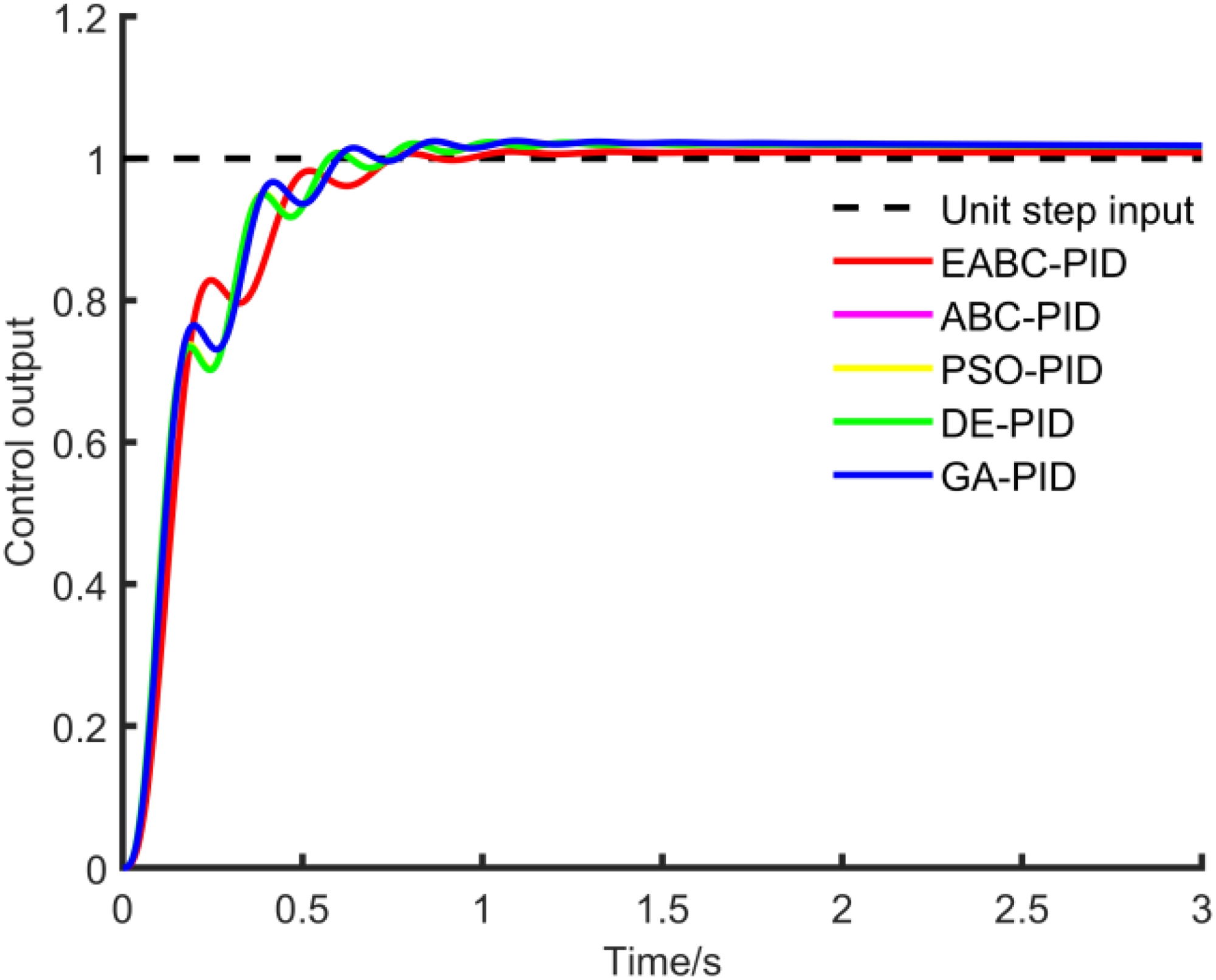
In this subsection, dynamic adjustment comparisons of five controllers are presented. The control outputs of the five controllers for the SSDCS under unit step input are shown in Figures 8–11. The following features can be seen in Figures 8–11. First, the control output of the EABC-PID for the SSDCS is less significantly different from the other four controllers. Second, the control outputs of all controllers for the SSDCS have oscillations within 1 s, and all control outputs are basically consistent with the unit step input after 1 s. Third, all controllers have larger overshoot with ITSE and have larger steady-state error with ISE.

Control output comparisons of the five controllers with ITSE.
Control output comparisons of the five controllers with ISE.

Control output comparisons of the five controllers with ITAE.

Control output comparisons of the five controllers with IAE.
To quantitatively analyze the influence of different controllers on dynamic adjustment performance, overshoot, steady-state error, settling time, and rise time are chosen as evaluation indexes. The rise time can evaluate the response speed of the controllers, the overshoot can evaluate the damping degree of the controllers, and the settling time reflects the combination of response speed and damping degree of the controllers. Tables 3–6 show the quantitative comparison of the five controllers, and also verify the results observed in Figures 8–11. Further analysis of Tables 3–6 shows that EABC-PID controller possesses minimum overshoot and maximum rise time with ITSE and ISE, maximum overshoot and minimum rise time with ITAE, and minimum overshoot and minimum rise time with IAE. It is worth noting that the EABC-PID has the minimum settling time regardless of which objective function is used, which means that EABC-PID has a better dynamic adjustment performance. In summary, the simulation results show that the EABC-PID controller improving the dynamic adjustment performance for the SSDCS is feasible.
Quantitative comparison of the five controllers with ITSE.

Quantitative comparison of the five controllers with ISE.

Quantitative comparison of the five controllers with ITAE.

Quantitative comparison of the five controllers with IAE.

Robustness simulation
The robustness of the controllers can be tested by the effect of suppressing the disturbance. A unit step disturbance is added to the SSDCS at the 2 s moment and the response of the five controllers to the disturbance is shown in Figures 12–15. From Figures 12–15, the five controllers can effectively suppress disturbances. However, it is not difficult to find that all the controllers suppress the disturbance for more than 1 s with ITSE, ISE, and IAE, while all the controllers suppress the disturbance for about 1 s with ITAE. ITAE for the SSDCS is an optimal choice to suppress the disturbances rapidly. Table 7 shows the ITAE values and suppression times of all the controllers under unit step disturbance. From Table 7, the ITAE value obtained by the EABC-PID is the smallest and the suppression time of the disturbance is also the shortest The simulation results show that the robustness of the EABC-PID for the disturbances is better than the other four controllers

Comparison of the five controllers for suppressing disturbance with ITSE.

Comparison of the five controllers for suppressing disturbance with ISE.

Comparison of the five controllers for suppressing disturbance with ITAE.
Comparison of the five controllers for suppressing disturbance with IAE.
Quantitative analysis of the five controllers for suppressing disturbance with ITAE.

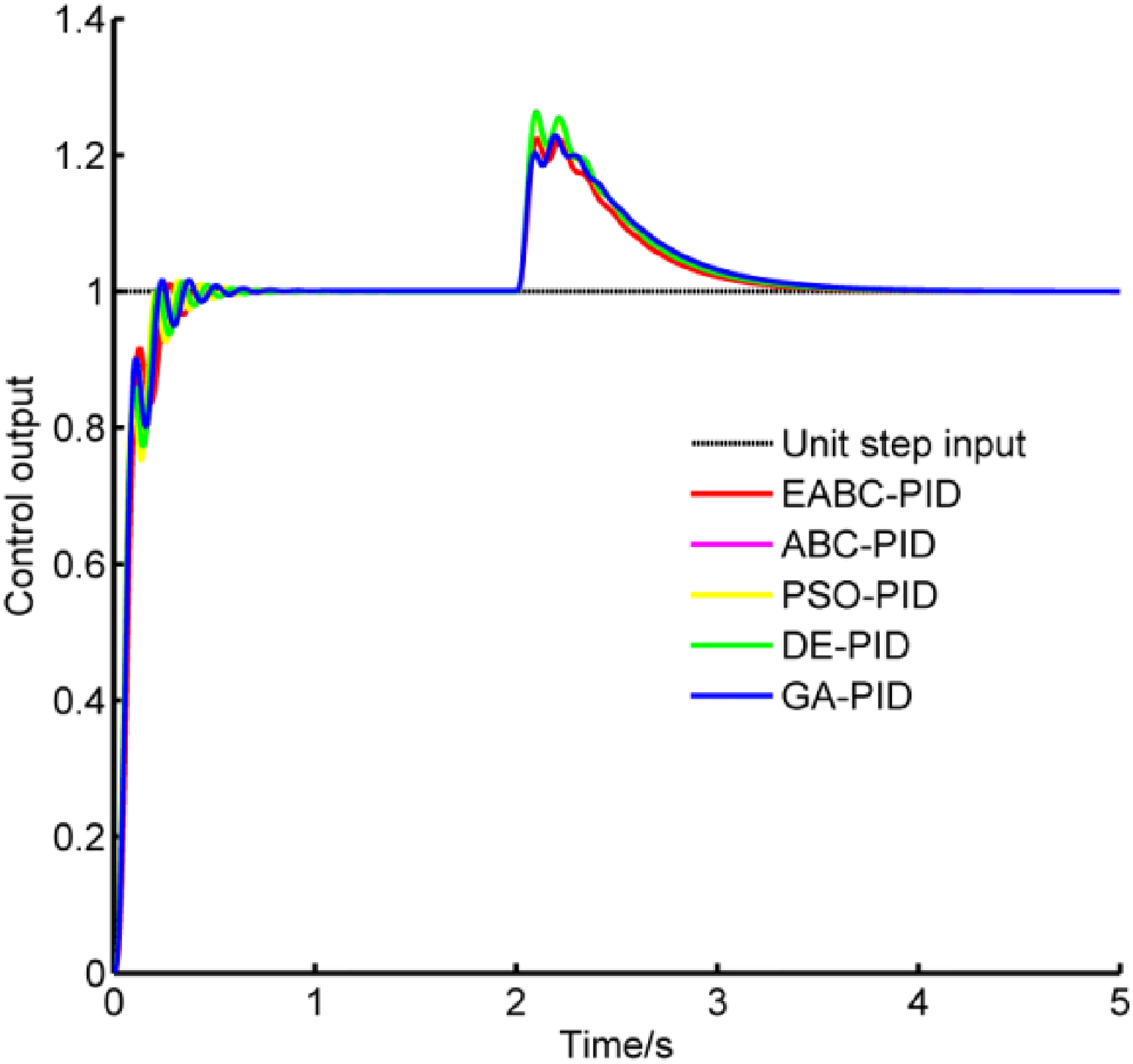
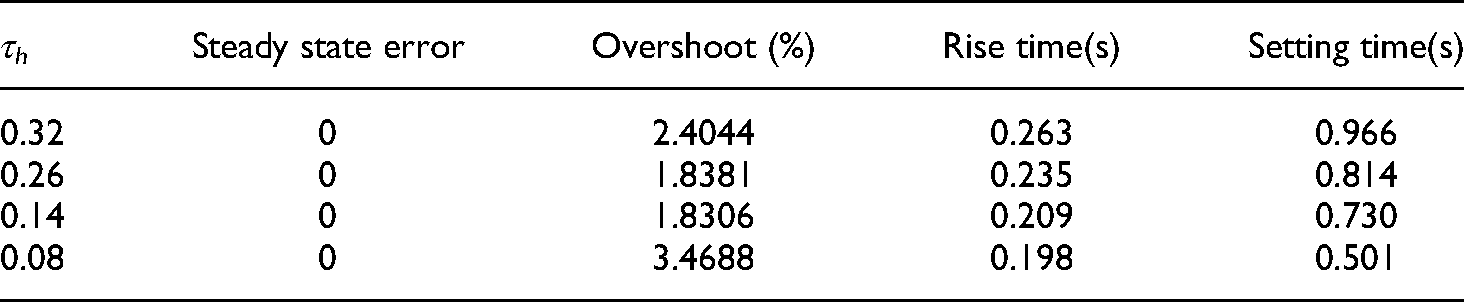
A good controller is not only able to suppress disturbances, but also to cope with changes in system parameters. Figures 16–19 shows the dynamic adjustment of the EABC-PID with ITAE when the SSDCS parameters are varied. From Figures 16–19, as the SSDCS parameters change, the control outputs of the EABC-PID change in a small range within 1.5 s, and the control outputs are consistent with the unit step input after 1.5 s. That means the change in the SSDCS parameters has little effect on the performance of the EABC-PID controller, which is also verified by Tables 8–11. The simulation results show that EABC-PID has good robustness to changes in the SSDCS parameters.

Control output for EABC-PID under the variation of ke.

Control output for EABC-PID under the variation of kh.

Control output for EABC-PID under the variation of τe.

Control output for EABC-PID under the variation of τh.
Quantitative analysis for EABC-PID under the variation of ke.

Quantitative analysis for EABC-PID under the variation of kh.

Quantitative analysis for EABC-PID under the variation of τe.

Quantitative analysis for EABC-PID under the variation of τh.
Conclusion
The purpose of the current study was to optimize PID controller gains for SSDCS by an enhanced ABC algorithm. One of the more significant findings to emerge from this study was that there was much stronger robustness against disturbances and parameter variation with EABC-PID controller than with the other four bio-inspired algorithm based PID controllers, namely ABC-PID, PSO-PID, DE-PID, and GA-PID, for SSDCS. The second major finding was that the EABC-PID controller also outperformed other controllers in terms of convergence and dynamic adjustment. Another finding was that ITAE as an objective function to suppress disturbances was superior to ITSE, ISE, and IAE for SSDCS.
This EABC-PID controller differs from previous controllers since EABC uses a new search equation introduced a global NS operator, instead of the original search equation for candidate solutions. The application of the ABC algorithm to the SSDCS is also a new attempt, especially in terms of robustness, which is not considered in the previous ABC algorithm based PID controllers. The findings of this investigation complement those of earlier studies.
This study was limited by the absence of using state-of-the-art bio-inspired algorithms for comparison. The exploration and exploitation capabilities of the state-of-the-art bio-inspired algorithms may be better than the EABC algorithm proposed in this paper. Despite its limitations, this study offers valuable insights into ABC algorithm based PID controllers. In future work, we hope to use the proposed EABC to optimize the gain of another competitive controller, the fractional order PID controller (FOPID). We also hope that the proposed EBAC-FOPID controller can be applied to the control of higher-order systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is fully supported by Liaoning Provincial Department of Education Basic Research Projects for Higher Education Institutions, China (grant number:LJKZ0301); The Scientific Research Foundation of the Education Department of Liaoning Province, China (grant number: 2017LNQN22); Young Teachers Foundation of University of Science and Technology Liaoning, China (grant number: 2017QN04).