
Abstract
Considering the real-time control of a high-speed parallel robot, a concise and precise dynamics model is essential for the design of the dynamics controller. However, the complete rigid-body dynamics model of parallel robots is too complex for online calculation. Therefore, a hierarchical approach for dynamics model simplification, which considers the kinematics performance, is proposed in this paper. Firstly, considering the motion smoothness of the end-effector, trajectory planning based on the workspace discretization is carried out. Then, the effects of the trajectory parameters and acceleration types on the trajectory planning are discussed. But for the fifth-order and seventh-order B-spline acceleration types, the trajectory will generate excessive deformation after trajectory planning. Therefore, a comprehensive index that considers both the motion smoothness and trajectory deformation is proposed. Finally, the dynamics model simplification method based on the combined mass distribution coefficients is studied. Results show that the hierarchical approach can guarantee both the excellent kinematics performance of the parallel robot and the accuracy of the simplified dynamics model under different trajectory parameters and acceleration types. Meanwhile, the method proposed in the paper can be applied to the design of the dynamics controller to enhance the robot's performance.
Introduction
Parallel robots have attracted extensive attention from academia and industry over the last few decades.1–3 Due to the closed-loop structure features, compared with serial robots, parallel robots own advantages in stiffness and dynamics, which make them possible to work at a high speed and yet maintain a high level of accuracy. Therefore, parallel robots are widely used in industrial production lines to complete high-speed sorting, packing, stacking, and assembling. And this can be certificated by the successful applications of the well-known Delta robot and its modified versions.4–6
Because parallel robots usually work at a high speed, the influences of residual vibration on the working accuracy cannot be ignored. In view of this, the control algorithm should consider both the kinematics and dynamics performance of parallel robots. Therefore, it is very important to study the dynamics modeling method that is adaptive to the design of the controller. For dynamics modeling, there are many methods that can be used, such as Newton–Euler formulation, 7 Lagrange formulation,8,9 virtual work principle,10,11 and some other methods. 12 Among them, the virtual work principle can avoid the calculation of the internal force term, and the solving process is relatively simple. Therefore, it is considered one of the most effective methods for dynamics modeling. However, the complete dynamics model of a parallel robot based on the virtual work is not concise for real-time control. Therefore, it is necessary to simplify it properly. Considering this, many scholars have done a lot of research on the simplification method of the dynamics model. To propose a general and concise dynamics modeling method, Orsino et al.13–15 proposed a modular modeling methodology for parallel robots, where any restriction concerning either the space index or the number of degrees of freedom does not need to be considered. Considering the contribution of different torque components, Carbonari 16 proposed a polynomial simplified dynamics model for the 3-central processing unit class of parallel robots by fitting the actual behavior of the robot prototype, which shows substantial reliability of the model in non-static conditions and advantages in terms of computation time. Considering the motion ranges of the legs are smaller than those of the moving platform and the sliders, Gao et al. 17 proposed a simplified modeling method for the 3-PRRR/PPRR (P-Prismatic, R-Revolute) redundantly actuated parallel mechanism, where the mass of the legs are divided into two parts and concentrated in the moving platform and the sliders, respectively. Without considering the rotational inertia of the passive limbs, Codourey 18 proposed a dynamics model simplification method of the Delta parallel robot by dividing the mass of the passive limbs into two parts, where two-thirds are attached to the end of the active limbs and the rest is attached to the moving platform. Based on the calculation principle of the rotational inertia, Wu et al. 19 proposed a similar model simplification method, where the mass of the passive limbs is equally distributed to the end of the active limbs and the moving platform. Subsequently, many scholars analyzed and demonstrated the simplified criteria based on the above-mentioned mass distribution method.20–23
It should be noted that there is a lot of researches on the dynamics model simplification, while the influence of kinematics characteristics on the model simplification is seldom studied. In fact, the dynamics performance of the robot can be affected by kinematics characteristics. Although many scholars have conducted extensive research on trajectory planning to improve kinematics performance, seldom combine it with dynamics model simplification. And the dynamics characteristic is different under different trajectory parameters and acceleration types, so the simplified dynamics model adopted by the single fixed coefficient will generate a large error. Therefore, a dynamics simplification method based on the combined coefficients, which considers kinematics performance, is proposed in this paper. And based on this, taking the Delta robot as an example, the integrated analysis of trajectory planning and dynamics model simplification under different trajectory parameters and acceleration types is studied. In brief, considering kinematics performance, a hierarchical simplification method of rigid-body dynamics modeling based on combination coefficients is proposed in this paper, which can be implemented in the design of the dynamics controller to enhance the robot performance.
In this work, the rest of this paper is organized as follows: section “Kinematics and dynamics” establishes the kinematics and dynamics model of the robot. And a hierarchical approach for dynamics model simplification based on the combined coefficients is proposed for subsequent optimization analysis. In section “Trajectory planning,” the trajectory planning based on the workspace discretization is studied. After trajectory planning, the dynamics model simplification method based on the combined mass distribution coefficients is introduced in section “Dynamics model simplification.”. Finally, the main conclusions are drawn in section “Conclusions.”
Kinematics and dynamics analysis
As shown in Figure 1, the Delta robot is composed of a static platform, a moving platform, and three identical kinematic chains, which are connected to the static platform and moving platform by revolute joints and spherical joints, respectively. Each kinematic chain contains an active limb and a passive limb of a parallelogram structure, which are connected to each other by a spherical joint. Motors and reducers are installed on the static platform to reduce the mass of moving parts. Driven independently by three servo motors, the robot provides the moving platform with a 3-degree of freedom translational motion capability.

The computer-aided design (CAD) model of the Delta robot.
Kinematics analysis
For the convenience of analysis, a schematic diagram of the Delta parallel robot is depicted in Figure 2. The global coordinate system O–xyz is attached to the geometric center of the static platform, with the x-axis pointing to point A1, the y-axis parallel to A3A2, and the z-axis can be determined by the right-hand rule. Since there is no rotation of the moving platform, the moving platform can be simplified to a point P. Ai is the center of the ith revolute joint. The passive limb is a quadrilateral mechanism, thus it can be represented by a limb BiP that goes through the midpoint of two short sides.
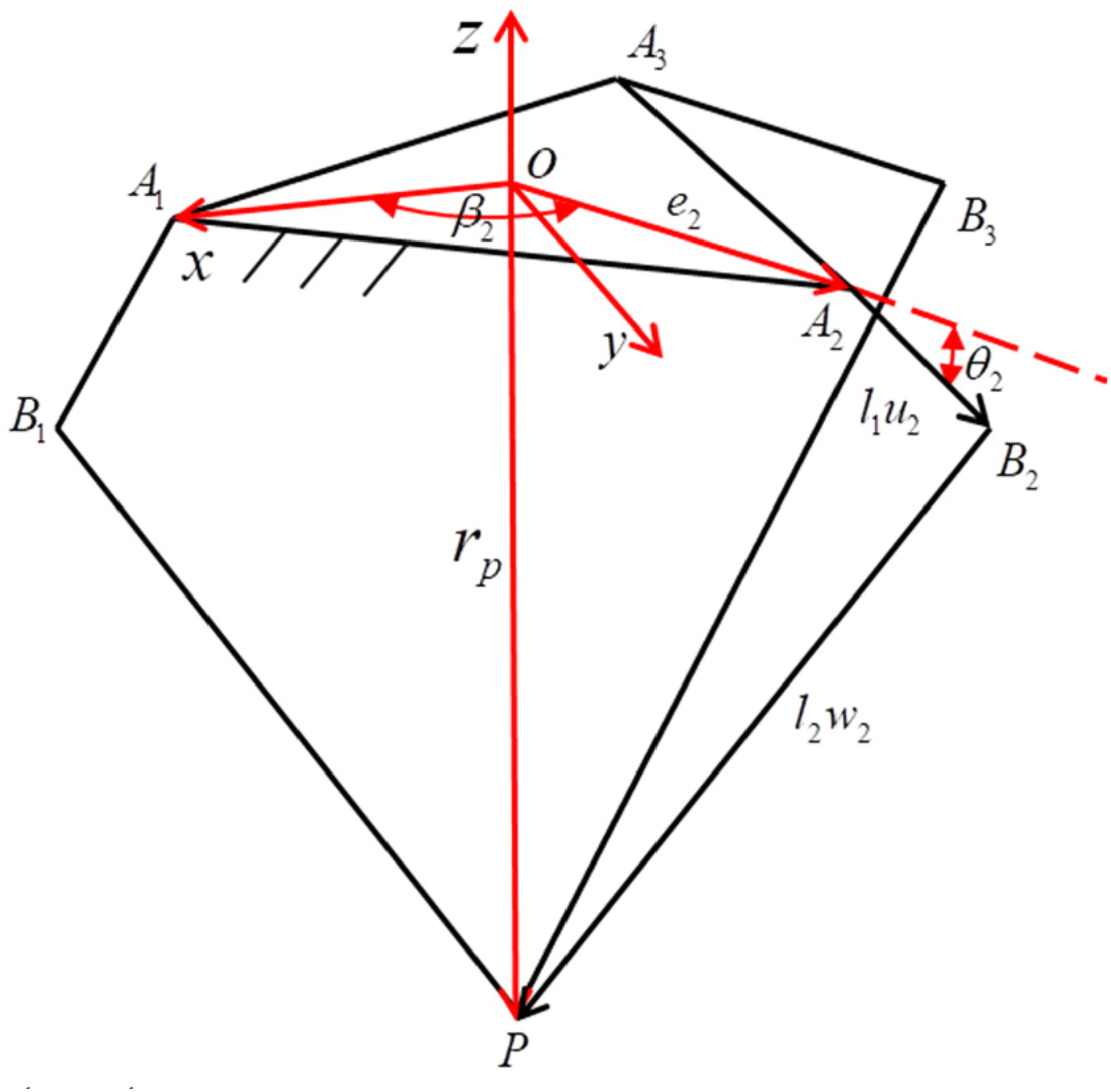
The schematic diagram of the Delta robot.
In the global coordinate system, the position vector of the manipulator endpoint P can be expressed as

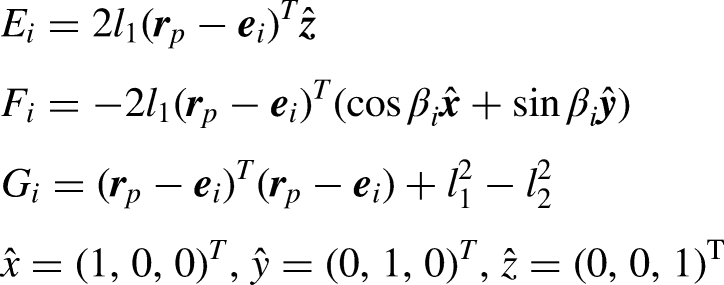
Through the assembly relationship of the Delta robot, the inverse position solution model can be formulated as







Through the same way, the acceleration vector of a passive limb can also be derived as

Combining equations (6) and (7), the centroid acceleration vector of the passive limb can be expressed as

Taking the third derivative of equation (1) with respect to time, the angular jerk vector of active limbs can be derived as

Dynamics analysis
For the convenience of analysis, the local coordinate O–xiyizi is attached to the centroid of the ith passive limb, and the z-axis is along the axis of the passive limb, the x-axis is perpendicular to the z-axis and in the plane composed of


Simplification strategy analysis
To establish a simplified dynamics model based on the combined mass distribution coefficients, which considers the kinematics performance of the robot, a hierarchical procedure is proposed in this section. As shown in Figure 3, firstly, an acceleration type is selected initially according to the experiences. Secondly, the trajectory planning based on the workspace discretization is carried out. Then, based on the optimal results, analyzing the output performance of the robot whether can meet the mission requirements. When the terminating condition (TC) is satisfied, the determination of the combination coefficients is carried out in Step 3. Finally, the final optimal results can be obtained.

The hierarchical procedure of dynamics model simplification.
Trajectory planning
Description of a typical trajectory
As the Delta parallel robot is mainly used to complete the grasping and placing operations in practical engineering, the typical motion trajectory of the end-effector in the workspace is a “door” type as shown in Figure 4, which includes some key points P1–P7. The vertical height and horizontal width of the trajectory are ha and ba, respectively. The hm is the vertical distance from P1 to P2. And

The schematic of the motion trajectory in the workspace.
Selection of acceleration types
3–4–5 polynomial
In terms of the selection of acceleration types, there are many acceleration types that can be adopted in trajectory planning, such as polynomial acceleration law, trapezoidal acceleration law, sine acceleration law, and B-spline acceleration law. Among them, the 3–4–5 polynomial is the most commonly used and effective acceleration type, which can be expressed as

B-spline
Based on the B-spline acceleration law, trajectory planning can make the curves of velocity, acceleration, and even jerk continuously. Meanwhile, the values of velocity, acceleration, and jerk at the starting and ending points can be arbitrarily defined. A B-spline curve of order k is a piecewise polynomial, which can be formulated as



Accordingly, the rth derivative of




Comparison of different acceleration types
For the convenience of analysis, taking a typical case where the trajectory parameter hd = 0.125 m,

The output performance comparison between 3–4–5 polynomial and B-splines.
Trajectory optimization
As shown in Figure 5, when the different acceleration types are adopted, the output performances of the robot under the same trajectory parameters and segment time are different. Therefore, it is necessary to analyze trajectory planning under different acceleration types. Since the Delta parallel robot is mainly used to complete the grasping and placing operations in practical engineering, the motion smoothness of the end-effector is very important. Therefore, the trajectory planning based on motion smoothness will be conducted in this section. In addition, the trajectory parameters such as

The discretization of workspace.
As the motion smoothness of the trajectory is mainly reflected in the value of the jerk. It is necessary to study trajectory planning based on the minimum jerk. Therefore, considering the average cumulative effects of the joint jerk in a single movement period, the following index can be defined to evaluate the motion smoothness of the trajectory:


Based on the minimum jerk optimization, the final optimization results are shown in Figure 7. It can be seen that the trajectory parameters

The results after minimum jerk optimization.
To analyze the above phenomenon, taking the 3–4–5 polynomial acceleration law as an example, the relationship between the angular motion range of active limbs
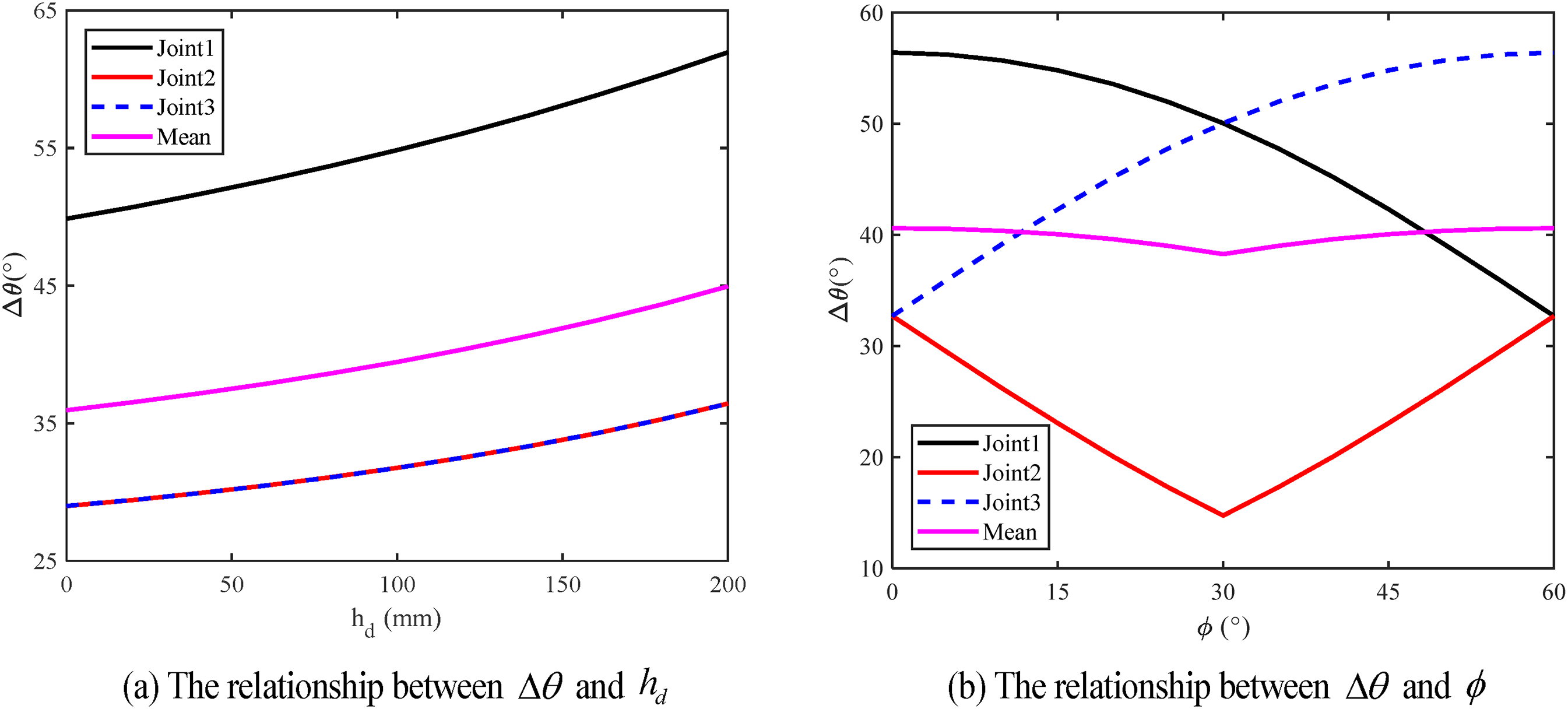
The relationship between
To compare the motion parameters of robot joints before and after minimum jerk optimization, taking
The motion parameters of robot joints before and after minimum jerk optimization (units: s, s, °/s, °/s2, °/s3, N·m).

However, adopting the optimized segment time in Table 1, for the fifth-order and seventh-order B-spline acceleration laws, the above optimization method can cause the deformations of the trajectory curve, which are 43.1 mm and 52.4 mm, as shown in Figure 9, so it is necessary to suppress the deformation during trajectory planning.
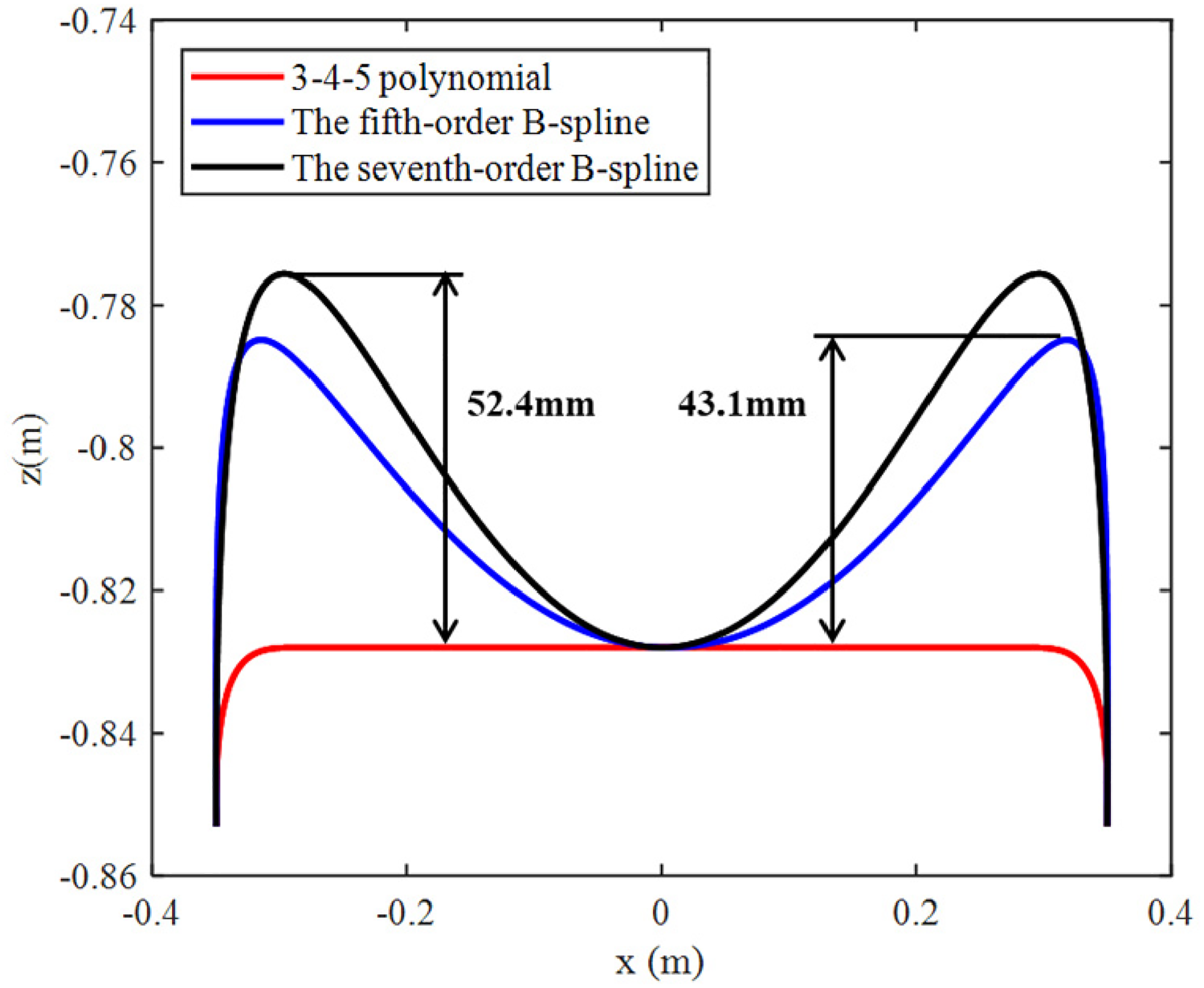
The trajectory after minimum jerk optimization.
According to equation (18), once the must-pass point sequence p is given, when calculating the control vertexes d of the trajectory based on B-spline acceleration laws, the control matrix
Firstly, taking the norm of equation (18), 







The motion trajectories after the comprehensive optimization.
After the above comprehensive optimization, for the typical case where
The motion parameters of the robot joints before and after comprehensive optimization (units: s, s, °/s, °/s2, °/s3, N·m).

Dynamics model simplification
Simplified rigid-body dynamics model
According to the complete rigid-body dynamics model, the input torque of the joints is composed of four parts, which are acceleration torque term
In the complete rigid-body dynamics model, the passive limbs torque term 

Generally, without considering the different torque components, the idea of rigid-body dynamics model simplification is directly divided the mass of the passive limbs into two parts, which are attached to the active limbs and the moving platform, respectively. And the mass distribution coefficients are r and 1 − r, respectively, which are usually unchanged for different trajectory parameters and acceleration types. But for different acceleration types, the contribution ratios of different torque components of the passive limb are different, as shown in Figure 11. Therefore, without considering the different torque components, taking the single fixed mass distribution coefficient for different trajectory parameters and acceleration types, the simplified model will produce a large deviation. A combined mass distribution coefficients simplification method, which considers the different torque components, is proposed in this section.

The variation of torque components of the passive limb in a single period.
Therefore, according to the acceleration term, velocity term, and gravity term, the mass of the passive limb is independently equivalent to the active limb and the moving platform, respectively. So the simplified rigid-body dynamics model based on the combined mass distribution coefficients can be obtained


The equivalent inertia parameters of the simplified rigid-body dynamics model.

Coefficients determination
To determine the value of the five mass distribution coefficients (
Based on the accuracy evaluation indexes, the optimization model for dynamics model simplification under the given trajectory parameters and acceleration type can be expressed as follows:

To make the determination process of combined mass distribution coefficients clear, a flowchart is depicted in Figure. 12. Firstly, by the trajectory planning based on the workspace discretization, the optimal segment time under different trajectory parameters is obtained. Secondly, the simplified rigid-body dynamics model based on combination coefficients and a complete rigid-body dynamics model are established. Finally, based on the above researches, analyzing the difference between complete and simplified dynamics models whether can meet the mission requirements. When the TC is satisfied, the final optimal combination coefficients can be obtained.

The determination procedure of combined mass distribution coefficients.
According to the trajectory planning results, the kinematics performances are greatly inflected by hd. Therefore, to analyze the influence of the trajectory parameters on the combined mass distribution coefficients, when the segment time of trajectory optimization under different acceleration types is adopted, the relationship between the combined mass distribution coefficients and

The relationship between the r and hd.
Taking the final optimal segmentation time of trajectory optimization in Table 2 as an example, the optimization results of the combined mass distribution coefficients are shown in Table 4. To evaluate the accuracy of the simplified dynamics model based on the combined coefficients, a comparative analysis of the simplified dynamics model based on the single coefficient, where the mass distribution coefficient r is 2/3 or 0.7, respectively, is carried out in this section. As can be observed in Figure 14, for the different acceleration types, the accuracy of the simplified rigid-body dynamics model based on the combined coefficients is significantly higher than that based on the single coefficient. To be specific, for 3–4–5 polynomial, the fifth-order B-spline and the seventh-order B-spline,
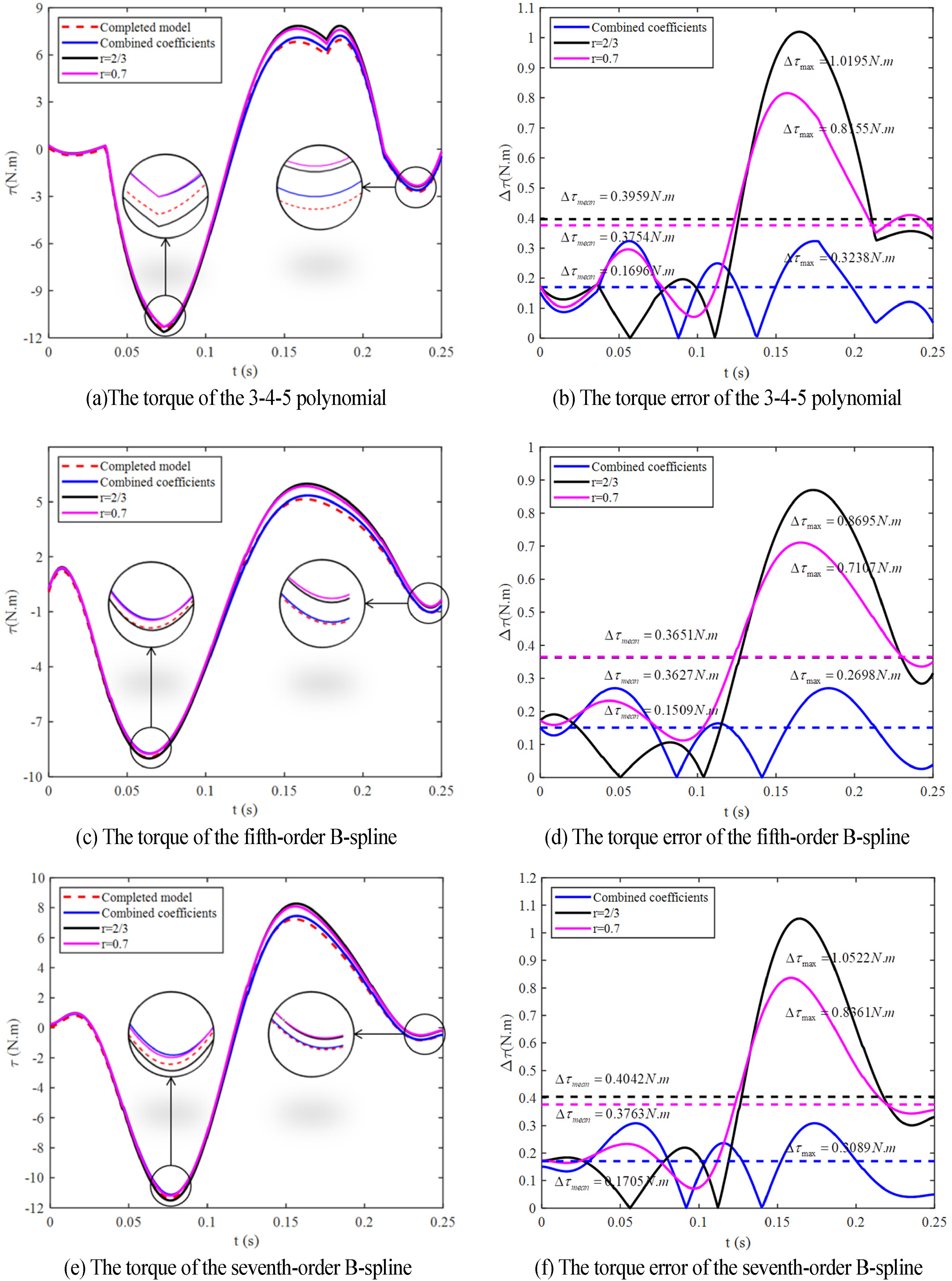
Comparison of different simplified methods.
The simplification results of the combined mass distribution coefficients.

Conclusions
This paper proposed a hierarchical approach for rigid-body dynamics model simplification of the high-speed parallel robot by considering kinematics performance. The main conclusions are drawn as follows:
Considering the effects of the trajectory parameters and the acceleration types on the robot output performance, a new trajectory planning method based on the workspace discretization was proposed. And for the minimum jerk optimization, the influence of trajectory parameters on segmentation time is different, but the influence of trajectory parameters on the smoothness index is almost the same. For the fifth-order and seventh-order B-spline acceleration types, by taking trajectory smoothness index and trajectory deformation index into account, a comprehensive optimization method was proposed. And this method can reduce the maximum jerk value of the robot joint under the allowable deformation of the trajectory curve. By decomposing the torque of the passive limbs, a dynamics model simplification method based on the combined mass coefficients was proposed. And comparing with the simplification method based on the single mass distribution coefficient, the simplification method based on the combined coefficients can greatly reduce the simplification error under different trajectory parameters and acceleration types.
Therefore, the hierarchical approach can guarantee both the excellent kinematics performance of the robot and the accuracy of the simplified dynamics model under different trajectory parameters and acceleration types. And the simplified model can be implemented in the design of the dynamics controller to enhance the robot performance. However, considering the calculation rapidity, the combined mass distribution coefficients are not adjusted in real-time according to the motion of the robot, which will be analyzed in future research work.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.